基于多傳感器組網(wǎng)的臨空高速飛行器協(xié)同檢測技術(shù)研究
2016-06-13 08:43:11楊博帆高嘉樂
傳感器與微系統(tǒng) 2016年3期
付 強(qiáng), 王 剛, 楊博帆, 高嘉樂
(空軍工程大學(xué) 防空反導(dǎo)學(xué)院,陜西 西安 710051)
?
研究與探討
基于多傳感器組網(wǎng)的臨空高速飛行器協(xié)同檢測技術(shù)研究
付強(qiáng), 王剛, 楊博帆, 高嘉樂
(空軍工程大學(xué) 防空反導(dǎo)學(xué)院,陜西 西安 710051)
摘要:臨近空間高速飛行器飛行距離遠(yuǎn),速度快,單一傳感器對此類目標(biāo)檢測能力有限。為了提高實(shí)時(shí)檢測能力,行之有效的方法是多傳感器融合檢測。分析了目標(biāo)在不同俯仰角和方位角時(shí)雷達(dá)橫截面(RCS)隨傳感器頻率的變化情況,分別仿真了X波段、P波段、C波段的探測點(diǎn)跡完整率,并對雷達(dá)組網(wǎng)協(xié)同檢測系統(tǒng)的探測點(diǎn)跡完整率進(jìn)行仿真。結(jié)果表明:采用分布式雷達(dá)組網(wǎng)協(xié)同檢測方法可有效提高檢測概率。
關(guān)鍵詞:臨空高速飛行器; 多傳感器組網(wǎng); 分布式協(xié)同檢測
0引言
在臨空高速飛行器目標(biāo)檢測中,由于目標(biāo)的飛行空域高,速度快,且可跨層變軌飛行,機(jī)動(dòng)性強(qiáng),無固定軌跡等特點(diǎn),使得臨空高速飛行器表現(xiàn)為機(jī)動(dòng)弱小目標(biāo),傳感器接收信噪比低。憑借單一傳感器很難對目標(biāo)整個(gè)運(yùn)動(dòng)狀態(tài)進(jìn)行檢測,通過采用多傳感器分布式協(xié)同檢測,使低信噪比條件下目標(biāo)的檢測概率得到顯著提升[1]。分布式協(xié)同檢測系統(tǒng)其通信帶寬要求低,處理速度快,系統(tǒng)生存能力強(qiáng),且融合效果滿足要求,能夠適用于臨空高速飛行器的目標(biāo)檢測。
在實(shí)際中,各傳感器往往配置在一個(gè)很寬廣的地理范圍之上,而傳感器之間可允許的通信容量是受到限制的。在這種情況下,可以在各傳感器處完成一定量的計(jì)算和處理任務(wù),將經(jīng)過處理和壓縮后的傳感器數(shù)據(jù)傳送到融合中心,然后融合中心把接收到的信息進(jìn)行適當(dāng)?shù)慕M合產(chǎn)生全局推理,得到全局結(jié)果[2]。此時(shí)由于傳感器位置的不同,各傳感器對同一目標(biāo)觀測時(shí)的效果也不同,存在著起伏。本文通過對雷達(dá)組網(wǎng)的分析,對協(xié)同檢測技術(shù)進(jìn)行研究。
1傳感器組網(wǎng)的檢測性能分析
臨空高速飛行器從起飛到完成任務(wù)的整個(gè)過程中,飛行距離很遠(yuǎn),并且速度快,單一傳感器難以實(shí)現(xiàn)對目標(biāo)整個(gè)運(yùn)動(dòng)狀態(tài)的檢測,得到目標(biāo)運(yùn)動(dòng)的航跡。對于隱身目標(biāo),其迎頭方向雷達(dá)橫戴面(radar cross section,RCS)通常很小,而其他方向RCS可能較大,通過多傳感器組網(wǎng),構(gòu)成協(xié)同檢測系統(tǒng),獲取全空域、全方位、全頻段的信息,能夠更好地實(shí)現(xiàn)對目標(biāo)的檢測[3]。
以美軍的HTV—2為例,圖1為入射波俯仰角為0°、方位角為60°時(shí)RCS隨頻率變化情況,圖2為P波段入射波俯仰角分別為0°和-30°時(shí)RCS隨方位角的變化情況。
圖1表明:入射波頻率的增加會導(dǎo)致目標(biāo)RCS的減少,在P波段,HTV—2的RCS為0.35 m2左右,但在X波段只有0.2 m2左右。由圖2可以看出:對于迎頭方向,當(dāng)入射波俯仰角為0°時(shí),RCS約為0.02 m2,入射波俯仰角為-30°時(shí),RCS約為0.01 m2;而尾部方向RCS約為0.01 m2。因此,當(dāng)飛行器朝向雷達(dá)飛行時(shí),會呈現(xiàn)出高速、微弱雷達(dá)目標(biāo)的特性,主要表現(xiàn)為目標(biāo)回波信噪比非常低[4,5]。
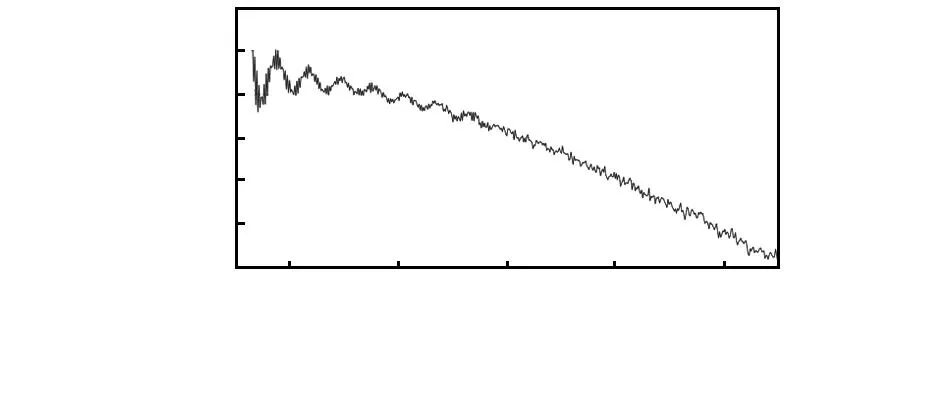
圖1 RCS隨頻率變化情況Fig 1 Variation of RCS with frequency
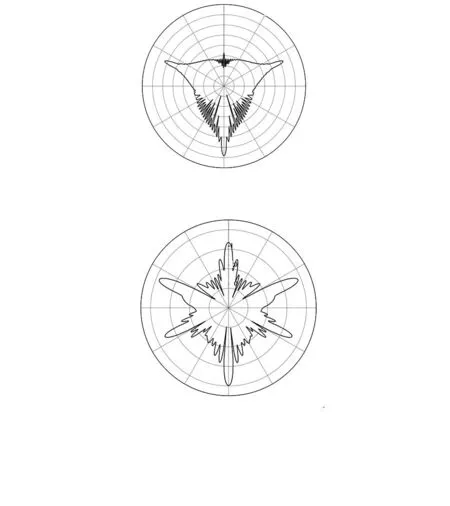
圖2 目標(biāo)RCS隨方位角變化情況Fig 2 RCS of target varies with azimuth angle
2傳感器組網(wǎng)下的協(xié)同檢測方法
在多傳感器協(xié)同檢測中,各傳感器的探測范圍通常沒有交疊。此時(shí),對于整個(gè)雷達(dá)網(wǎng)采用的協(xié)同檢測算法通常為“或”準(zhǔn)則,即當(dāng)至少有一部傳感器檢測到目標(biāo),傳感器網(wǎng)即判定為有目標(biāo)[6,7]。
2.1融合模型
圖3為地基、空基和天基平臺組成的多傳感器協(xié)同檢測系統(tǒng),分別覆蓋不同的區(qū)域,通過組網(wǎng)的形式,使得系統(tǒng)能夠覆蓋全空域。在對目標(biāo)進(jìn)行檢測時(shí),多傳感器協(xié)同檢測與單一傳感器相比,在整個(gè)空域都具有較高的檢測概率[8]。
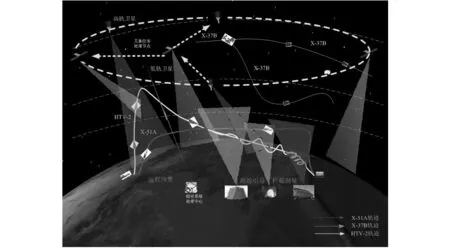
圖3 多傳感器協(xié)同情況示意圖Fig 3 Diagram of multisensor coordination
如圖4所示,由N部傳感器組成傳感器網(wǎng),并采用并行結(jié)構(gòu)的分布式檢測,觀測數(shù)據(jù)為y1,y2,…,yN,分別做出判決u1,u2,…,uN,送至融合中心,最后按照融合準(zhǔn)則f(μ1,μ2,…,μN(yùn))得到傳感器網(wǎng)的全局判決。
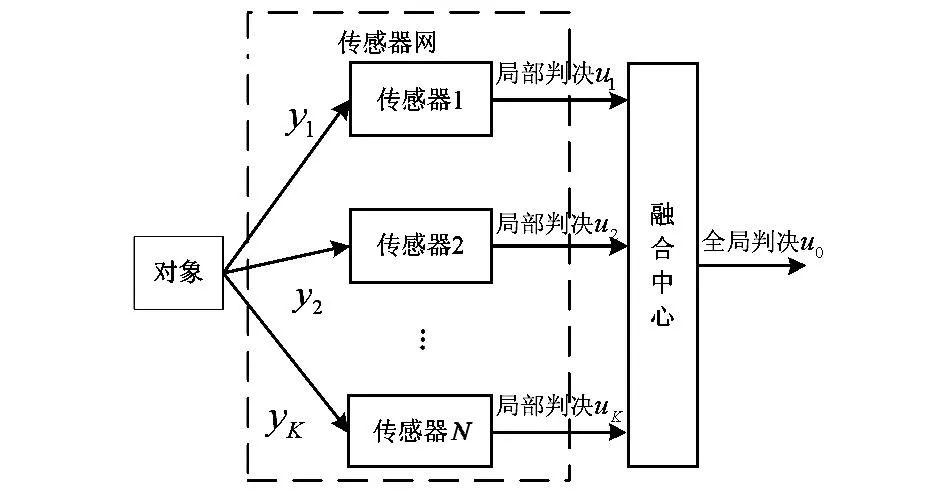
圖4 “或”準(zhǔn)則算法融合模型Fig 4 “or”criterion algorithm fusion model
2.2協(xié)同算法
在“K/N表決器”算法中,設(shè)由N部傳感器組成的傳感器網(wǎng),第i部傳感器的判決ui為1時(shí),有目標(biāo);為0時(shí),無目標(biāo)。
融合中心的檢驗(yàn)統(tǒng)計(jì)量α為
(1)
多傳感器協(xié)同組網(wǎng)的判決u0為
(2)
多傳感器組網(wǎng)的檢測概率PD0和虛警概率PF0為

(3)

(4)
式中U=[u1,u2,…,uN]T。
(5)
(6)
當(dāng)K=1時(shí),“K/N表決器”算法為“或”準(zhǔn)則算法[8]。
3仿真分析與驗(yàn)證
3.1仿真場景與傳感器部署
在多傳感器組網(wǎng)協(xié)同檢測系統(tǒng)中,分別采用目標(biāo)指示雷達(dá)(X波段)、天基雷達(dá)(P波段)和預(yù)警雷達(dá)(C波段)三部在空間上分布不相同的雷達(dá)對目標(biāo)進(jìn)行探測。目標(biāo)起始位置為(1 500,1 500)km,目標(biāo)飛行高度為50 km,速度為8Ma,飛抵位置為(0,0)km,海拔0 m。根據(jù)不同雷達(dá)的具體功能任務(wù),分布式協(xié)同檢測系統(tǒng)部署情況如下:在(0,0)km處部署一部X波段雷達(dá),高度0 km;在(600,100)km處部署一部P波段天基雷達(dá),軌道高度11 000 km;在(1 000,600)km處部署一部C波段雷達(dá),海拔2 000 m。雷達(dá)參數(shù)設(shè)置為:
1)X波段雷達(dá)頻率10 GHz,電磁波垂直極化,峰值發(fā)射功率500 kW,天線增益55 dB,接收機(jī)帶寬20 MHz,噪聲系數(shù)4 dB,系統(tǒng)損耗10 dB,虛警概率10-6。
2)P波段雷達(dá)頻率400 MHz,電磁波垂直極化,峰值發(fā)射功率1 MW,天線增益50 dB,接收機(jī)帶寬10 MHz,噪聲系數(shù)3 dB,系統(tǒng)損耗10 dB,虛警概率10-6。
3)C波段雷達(dá)頻率5 GHz,電磁波垂直極化,峰值發(fā)射功率600 kW,天線增益40 dB,接收機(jī)帶寬30 MHz,噪聲系數(shù)4 dB,系統(tǒng)損耗10 dB,虛警概率10-6。
目標(biāo)在整個(gè)運(yùn)動(dòng)過程中,首先進(jìn)行水平機(jī)動(dòng),接近飛抵位置后結(jié)束水平機(jī)動(dòng),進(jìn)行俯沖運(yùn)動(dòng)。傳感器部署位置和目標(biāo)運(yùn)動(dòng)軌跡的三維圖如圖5所示。
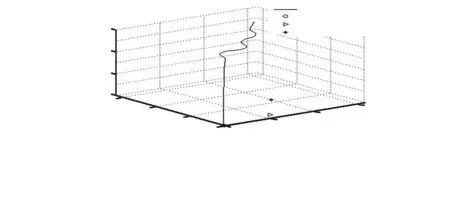
圖5 目標(biāo)運(yùn)動(dòng)軌跡與雷達(dá)部署Fig 5 Moving track of target and radar deployment
通過各局部傳感器的探測點(diǎn)跡完整率來體現(xiàn)各個(gè)傳感器的檢測性能,為傳感器探測到的點(diǎn)跡與整個(gè)過程中傳感器掃描總次數(shù)之比[10]。
探測點(diǎn)跡完整率=探測點(diǎn)跡/掃描次數(shù)。
3.2局部傳感器檢測性能分析
各傳感器根據(jù)目標(biāo)和傳感器的相對位置,通過RCS數(shù)據(jù)庫和雷達(dá)方程計(jì)算出傳感器的回波功率,通過CFAR準(zhǔn)則完成檢測,得到目標(biāo)點(diǎn)跡。
1)X波段雷達(dá)探測點(diǎn)跡分析
X波段雷達(dá)部署在后方,雷達(dá)所示方向?yàn)槟繕?biāo)迎頭方向。如圖6所示,當(dāng)目標(biāo)接近雷達(dá)時(shí),檢測概率提高。對于整個(gè)目標(biāo)運(yùn)動(dòng)點(diǎn)跡,X波段的探測點(diǎn)跡完整率僅為21.50 %。
2)P波段天基雷達(dá)探測點(diǎn)跡分析
對于P波段天基雷達(dá),對目標(biāo)為俯視,RCS相對較大。如圖7所示,P波段天基雷達(dá),在中間區(qū)域檢測概率較高,為24.30 %。
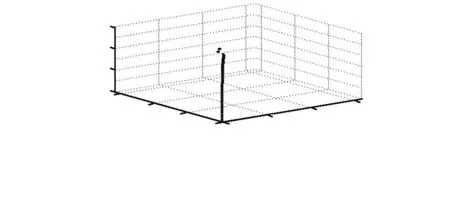
圖6 X波段雷達(dá)檢測目標(biāo)點(diǎn)跡圖Fig 6 Target trace point diagram of X band radar detecting
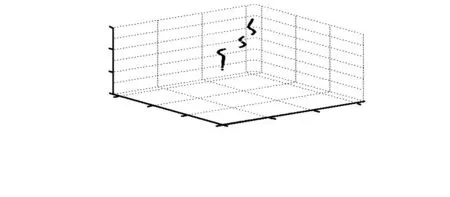
圖7 P波段雷達(dá)檢測目標(biāo)點(diǎn)跡圖Fig 7 Target trace point diagram of P band radar detecting
3)C波段雷達(dá)探測點(diǎn)跡分析
C波段雷達(dá)通常在前沿部署,目標(biāo)與C波段雷達(dá)距離迅速增加,檢測概率降低。如圖8所示,C波段雷達(dá),在前期和中期能夠檢測到較多點(diǎn)跡,為27.55 %。
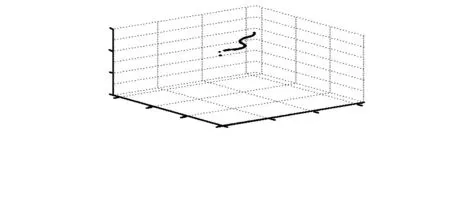
圖8 C波段雷達(dá)檢測目標(biāo)點(diǎn)跡圖Fig 8 Target trace point diagram of C band radar detecting
3.3融合中心檢測性能分析
如前文所述,臨空高速飛行器將穿越不同傳感器的有效探測范圍[11]。由以上三種傳感器組成的協(xié)同檢測系統(tǒng)探測點(diǎn)跡如圖9所示。

圖9 融合中心檢測目標(biāo)點(diǎn)跡圖Fig 9 Target trace point diagram of fusion center detecting
由圖9可以看出:采用組網(wǎng)協(xié)同檢測,對于目標(biāo)整個(gè)運(yùn)動(dòng)過程,目標(biāo)探測點(diǎn)跡完整率相比單雷達(dá)檢測得到了有效的提升,達(dá)到了62.31 %。在目標(biāo)運(yùn)動(dòng)的整個(gè)過程中,各雷達(dá)和與融合中心對于目標(biāo)的探測點(diǎn)跡完整率如圖10所示。
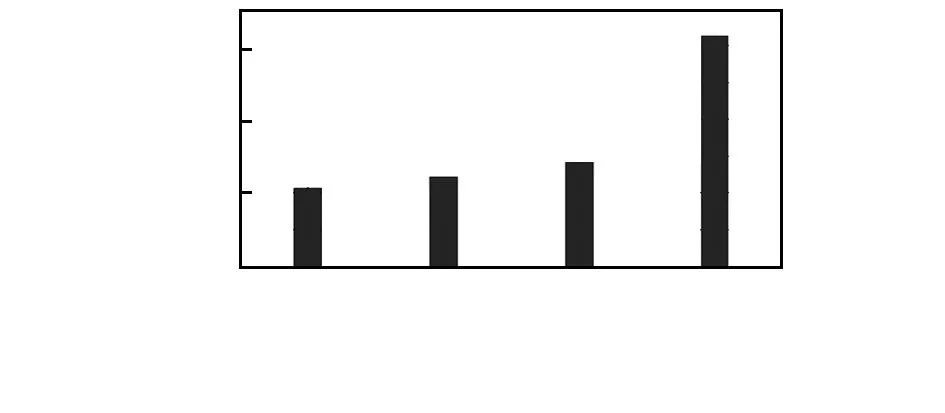
圖10 探測點(diǎn)跡完整率對比Fig 10 Contrast of detecting trace point integrity rate
可以看出,單一傳感器的探測點(diǎn)跡完整率分別為21.50 %,24.30 %,27.55 %。采用傳感器協(xié)同組網(wǎng)檢測,探測點(diǎn)跡完整率為62.31 %。
圖11為各雷達(dá)與融合中心的檢測概率與目標(biāo)距離保衛(wèi)要地的關(guān)系。
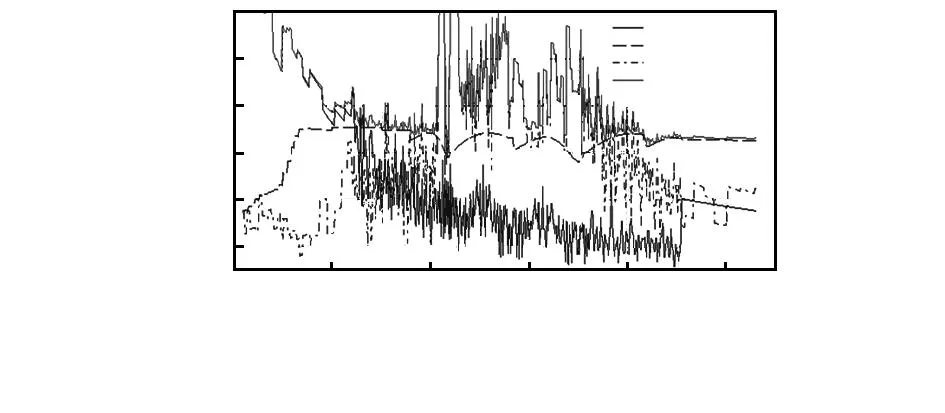
圖11 檢測概率與距離關(guān)系Fig 11 Relationship between detecting probability and distance
由圖11可以看出,單一傳感器僅在飛行器運(yùn)動(dòng)的整個(gè)過程中的特定階段具有較高檢測概率,整體檢測概率較低。通過采用多傳感器協(xié)同組網(wǎng)方式,融合中心的檢測概率相比單傳感器有了很大提高,檢測性能得到了明顯的提升。
4結(jié)論
本文對傳感器組網(wǎng)下的協(xié)同檢測性能進(jìn)行了理論分析,給出了組網(wǎng)情況下的并行結(jié)構(gòu)的融合模型和“或”準(zhǔn)則協(xié)同檢測算法,建立傳感器網(wǎng)并利用臨空高速飛行器RCS數(shù)據(jù)庫進(jìn)行仿真驗(yàn)證,結(jié)果表明:通過傳感器組網(wǎng),能夠較好地解決單一傳感器發(fā)現(xiàn)難、檢測范圍有限等難題,無論從探測點(diǎn)跡的完整程度還是每一時(shí)刻的檢測概率,系統(tǒng)的檢測性能得到了有效的提升。
參考文獻(xiàn):
[1]王欣,姚佩陽,周翔翔,等.信息共享?xiàng)l件下傳感器組網(wǎng)發(fā)現(xiàn)概率建模[J].電光與控制,2012,19(11):26-30.
[2]熊年生.基于分布式檢測的雷達(dá)組網(wǎng)探測技術(shù)研究[J].雷達(dá)科學(xué)與技術(shù),2012,10(4):363-366,371.
[3]趙菊敏,張子辰,李燈熬.一種無線傳感器網(wǎng)絡(luò)鏈?zhǔn)絺鬏敺执芈酚蓞f(xié)議[J].傳感器與微系統(tǒng),2014,33(3):135-138.
[4]ZhengSheng,ShiWenzhong,LiuJian,eta1.Multi-sourceimagefusionmethodusingsupportvaluetransform[J].IEEETransactionsonImageProcessing,2007,16(7):1831-1839.
[5]趙丹,肖繼學(xué),劉一.智能傳感器技術(shù)綜述[J].傳感器與微系統(tǒng),2014,33(9):4-7.
[6]劉欽.多傳感器組網(wǎng)協(xié)同跟蹤方法研究[D].西安:西安電子科技大學(xué),2013.
[7]蔣鐵珍.分布式檢測多目標(biāo)融合算法研究[J].中國電子科學(xué)院學(xué)報(bào),2010,5(6):594-598.
[8]劉向陽,許稼.多傳感器分布式信號檢測[M].北京:國防大學(xué)出版社,2011.
[9]韓崇昭,朱洪艷,段戰(zhàn)勝.多源信息融合[M].2版.北京:清華大學(xué)出版社,2010.
[10]TianJing,CuiWei,ShenQing.High-speedmaneuveringtargetdetectionapproachbasedonjointRFTandkeystonetransfor-m[J].ScienceChina,2013,57:1-13.
[11] 沈曉靜.多傳感器分布式檢測和估計(jì)融合[J].中國科學(xué):數(shù)學(xué),2014,44(2):105-116.
Research on collaborative detection technology of near space high speed aircraft based on multi sensor networking
FU Qiang, WANG Gang,YANG Bo-fan, GAO Jia-le
(School of Air and Missile Defense,Air force Engineering University,Xi’an 710051,China)
Abstract:Because of far distance and fast speed of near space high speed aircraft flight,single sensor detectability on target is limited.In order to improve real-time detectability,effective method is multi-sensor fusion detection.Analyze change condition of radar cross section(RCS)with sensor frequency while target at different pitching and azimuth angles,respectively simulate integrity rate detection of trace point in,X band,P band,and C Band,and integrity rate detection of radar networking collaborative detection system of trace point is simulated.The results show that the distributed radar networking collaborative detection method can effectively improve detection probability.
Key words:near space high speed aircraft; multi sensor networking; distributed collaborative detection
DOI:10.13873/J.1000—9787(2016)03—0004—04
收稿日期:2015—06—11
中圖分類號:TP 391
文獻(xiàn)標(biāo)識碼:A
文章編號:1000—9787(2016)03—0004—04
作者簡介:
付強(qiáng)(1988-),男,陜西西安人,博士研究生,主要研究方向?yàn)橹悄苄畔⑻幚怼⑷跣∧繕?biāo)檢測跟蹤技術(shù)。