駕駛場景研究及其發展應用概述
2016-05-30 16:54:47朱向雷陳辰寶鶴鵬溫泉
時代汽車 2016年11期
朱向雷 陳辰 寶鶴鵬 溫泉

摘 要:人—車—環境作為一個閉環的交通駕駛場景,在以往的研究中,往往僅著眼于對車輛技術的研發而忽視對人的駕駛行為及交通環境的研究。智能車輛的發展需要車輛有能力對所在的交通場景進行明確的判斷,進而選擇出正確的行車邏輯,協助駕駛員進行車輛操控。但是中國的駕駛場景復雜多變,每種復雜的交通場景下往往又需要不同應對措施。本文基于中國汽車技術研究中心駕駛場景研究項目,介紹了駕駛場景研究的內容與意義,并對其未來發展在駕駛員行為研究、駕駛場景庫的搭建、智能車輛的研發等方向應用進行了描述。
關鍵詞:駕駛場景;駕駛行為分析;智能車;車輛信息采集系統
1 引言
中國的駕駛場景復雜多變,如何識別出車輛所在的駕駛場景,并根據相應的駕駛場景選擇出合適的行車邏輯,將是智能駕駛汽車發展函待解決的重要技術難題。駕駛場景大數據采集平臺基于車輛信息采集盒子、傳感器等硬件平臺,通過對實際交通環境數據及車輛的運行狀態信息進行采集后處理,來分析潛在的駕駛行為,并可以用于進行ADAS及智能車輛自動駕駛的算法優化和評估。通過數據采集和分析,建立基于實際交通環境的場景庫。基于該場景庫,不僅可以在具體功能開發過程中提出統計意義上的指導,避免關鍵參數主觀臆斷;同時也可以建立仿真模型庫,并提供用戶自動駕駛算法接口,將算法結果同實際數據進行定量分析,繼而提出對已有自動駕駛模型的改進意見。
2 駕駛場景研究介紹
中國汽車技術研究中心的駕駛場景研究項目,通過對名爵銳騰1.5T DCT車輛進行改裝并加裝傳感器,集成視頻采集設備、激光雷達、毫米波雷達、陀螺儀、GPS終端及CAN總線車輛信息記錄儀,綜合考慮人、車、環境三者的因素,采集車輛正常行駛過程中的運行參數、駕駛人對車輛的操控信息及外部交通環境的變化信息。不同設備數據的采樣頻率、數據格式往往不同,本系統可以在統一時鐘時間下對所有數據進行處理,解決時間軸統一的問題。
項目采用GPS定點對道路中特定的駕駛場景進行標定,以區分出十字路口、轉彎、掉頭等;通過雷達及攝像頭的機器視覺處理方法對周圍行人及車輛進行掃描以變對交通狀態進行感知。整套系統可自動對需要的駕駛場景進行區分。
試驗車先期在天津市內城區采集典型駕駛場景數據,包括城市綜合路況,城區快速路,高速公路,隧道,高架橋等路況信息,將包含正常駕駛過程中如轉彎,信號燈,變道,超車,跟馳等等多種情況。隨后我們將對該車在全國各地進行復制,運用多輛試驗車,全面涵蓋如東北高寒地帶,中部丘陵地帶,西北沙漠地帶的駕駛場景信息。盡可能全面的建設一個覆蓋全國多數情況的駕駛場景數據庫。
3 駕駛場景分類模型
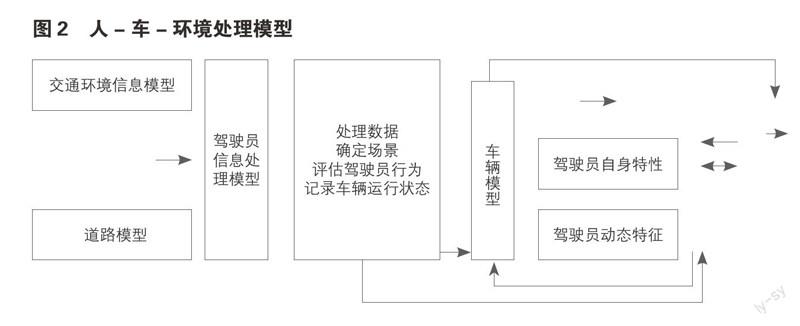
一個駕駛場景是由人-車-環境三個復雜因素共同構成,車輛是由人進行操控的,人的操控意識又受到道路交通環境的限制及車輛對人的反饋作用。車輛及交通環境是客觀的,無意識的。而人是主動的,有意識的[1]。最為車輛的感知層與決策層,駕駛人在駕駛過程中將對空間內的一切信息進行感知,判斷和處理,包括交通設施,交通標志,路況變化,天氣變化,其他行人及車輛等。車輛在行駛過程中的一切信息也都是有駕駛員來反映和控制的。人-車-環境三者關系見圖 2:
在該系統中,駕駛人屬性,車輛的設計參數及運行狀態,車輛行駛環境三者相互變化構成了錯綜復雜的駕駛場景,而準確識別出當前所在的交通場景,并對相應的場景做出合適的駕駛決策,這將是阻礙智能車發展最大的技術難題。
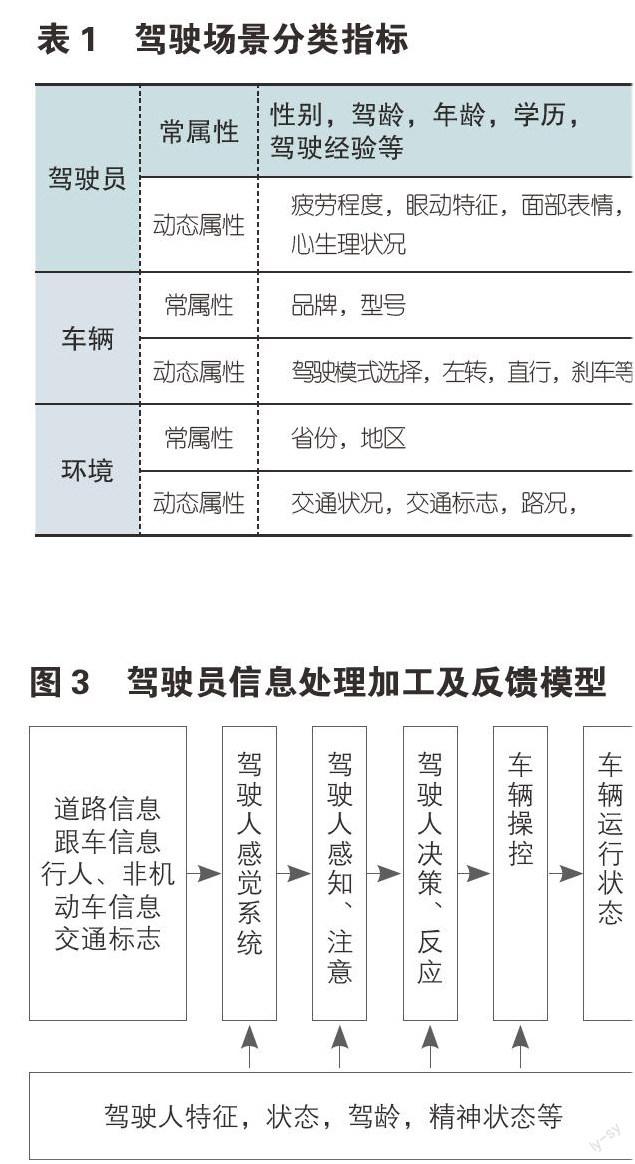
駕駛場景分類模型從坐標系的角度出發,以人、車、環境三個動態變化的因素構建坐標軸。其中駕駛人及車輛的本身屬性,如駕駛人性別、年齡、駕齡、學歷、車輛的型號等在整個駕駛過程中不發生變化的量為常屬性,用作對坐標系進行歸類,不參與坐標軸的構建。將在駕駛過程中不斷變化的參數,如駕駛人在駕駛過程中的疲勞狀態、視覺特征、動機、情緒、車輛的運行狀態如左轉、直行、剎車、交通環境中的擁堵狀況、信號燈、交通標志等,構建成坐標軸中互相獨立的元素。在整個駕駛過程庫中分別選取坐標軸上的每一個組合隨機配合,再加上常屬性的歸類條件,即可以枚舉遍布所有可能遇到的駕駛場景。
4 駕駛場景研究應用及展望
4.1 駕駛員行為研究
駕駛行為分析就是要對采集到的各類駕駛行為信息進行分析和處理,主要包括三方面的內容[2]:(1)駕駛行為表征體系研究。直接通過駕駛場景采集到的數據建立指標與駕駛行為特征之間的聯系;(2)駕駛行為深層體系研究。通過對大樣本人群的駕駛行為數據的分析,得出具有普適性的駕駛行為特征體系;(3)心理學層面的駕駛行為研究。對駕駛行為產生的原因進行神層次的探討,從人類心理學的角度解釋該行為產生原因。
4.2 駕駛場景庫搭建
在駕駛場景數據庫中,通過記錄不同場景下的交通道路條件信息及車輛的運行狀態信息,提取不同駕駛場景下的特征點,便于智能車輛研發中對相應場景進行識別。同時未來也可將構建好的智能車控制模型放在駕駛場景數據庫中虛擬運行,對控制模型的準確性進行驗證。
4.3 自動駕駛研發支持
汽車智能化已經是當今汽車產業技術革新的重要發展趨勢。自動駕駛車輛從根本上改變了傳統的“人-車-環境”閉環控制模式,將不可控的駕駛員從該閉環中請了出去,從而大大提高了交通系統的效率和安全性[3]。自動駕駛汽車就是通過先進的車載傳感器,控制器等裝置感知周圍環境,再通過車輛的控制系統自主完成對車輛的操控,使車輛按照人的意愿來達到目的地的。智能車輛可以整體分為以下三個結構:感知系統,規劃系統,決策和控制系統。駕駛場景實驗一方面可以優化感知層的構建,收集自動駕駛情況下所能采集到的環境信息并對其進行語義解析,為決策層做出車輛的控制判斷提供有效的依據。另一方面通過對各個駕駛場景下駕駛人對車輛操控的記錄,建立起不同環境條件下車輛的行車邏輯,幫助智能車輛建立起一個更全面完善的決策層面。加速智能汽車進入人們生活的步伐。
4.4 展望
人—車—環境作為一個閉環的控制系統,通過對駕駛人及道路交通信息研究的重視程度的加深,如駕駛行為識別與分析,道路譜信息收集等,駕駛場景研究及數據庫的建設可以幫助人們從另一個角度來助力車輛的正向研發進程并加速我國智能車輛的發展。
參考文獻:
[1] 雋志才,曹鵬,吳文靜.基于認知心理學的駕駛員交通標志視認性理論分析[J].中國安全科學學報,2005,15(8):8-12.
[2] 李平凡.駕駛行為表征及分析方法研究[D].吉林大學博士論文,2010.
[3] 喬維高.無人駕駛汽車的發展現狀及方向[J].上海汽車,2007,07:40-43.
[4] 初秀民,嚴新平,毛喆,汽車駕駛操作信息數據庫與采集系統設計[J].中國安全科學學報,2005,15(1):29-33.
[5] 余志生.汽車理論.北京:機械工業出版社,2009.
