RTK結合可編程計算器實現路塹開挖線放樣
2016-05-30 04:38:20焦健
科技風 2016年14期
關鍵詞:程序
焦健
摘 要:GPS實時動態測量簡稱RTK,它是集計算機技術、數字通訊技術、無線電技術和GPS測量定位技術為一體的組合系統,它能夠實時地提供測站點厘米級的三維定位結果,速度快、精度高。首先利用RTK獲取實時測站點三維坐標,然后將坐標數據輸入CASIO可編程計算器編寫好的程序中,通過程序計算實現路塹開挖線的放樣。
關鍵詞:RTK;路塹開挖線;放樣;程序
一、RTK技術簡介
從專業化角度出發,RTK屬于實時性以及動態性的測量技術,該系統主要包括基站、多個流動站與無線電通訊。具體來說,RTK技術存在諸多優勢,分別為無誤差累計、工作效率相對較高、能夠實現全天候的工作、自動化程度較高、集成化程度較高、定位精確、具有強大的測繪功能、具體操作流程簡單以及數據處理能力相對較強。
二、利用CASIO可編程計算器實現路塹開挖線放樣
之前路塹開挖線的實際放樣工作中,往往會采用相對落后的儀器設備以及操作方法,而且在操作期間必須要借助數學用表、計算尺、曲線用表以及計算盤等工具確保測量工作的順利完成。
而計算器的研發,在一定程度上改變了該局面,傳統形式的路塹開挖線具體測設方法已經被規范化的極坐標法取代,然而進行大量計算時,只能借助已經計算好的高程與坐標資料實施外業測量,在機動性方面較差,且現場查找往往不方便。一般情況,以上問題都可以借助CASIO系列的可編程計算器進行徹底解決。
三、內業程序編寫
本文以最簡單的道路線型為例,即“直線—圓曲線—直線“,利用卡西歐fx-5800p可編程計算器實現路塹開挖線程序的編寫。主程序主要用來計算未知點的道路樁號、開挖點位置到路面的垂直高度、開挖點到未知點的水平距離,子程序用來計算未知點開挖位置的設計標高。
(一)資料準備
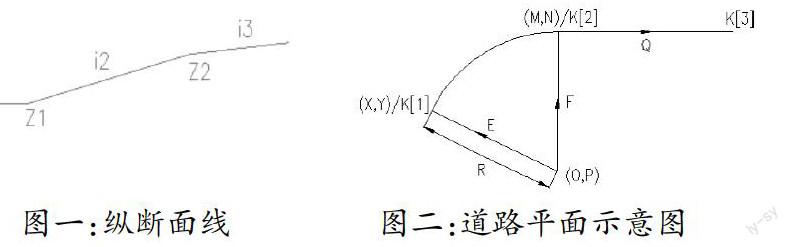
通過研究路塹開挖設計圖紙,獲取道路縱斷面線數據信息,包括各段道路的坡度Ii及變坡點樁號Zi(見圖一)道路平面曲線要素,包括直圓點坐標(X,Y)、圓直點坐標(M,N)、直圓點樁號K[ 1 ]、圓直點樁號K[ 2 ]、本段直線終點樁號K[ 3 ]、圓曲線的圓心坐標(O,P)及半徑R、圓心至直圓點方位角E、圓心至圓直點方位角F、直線段方位角Q(見圖二)。將道路要素匯總到excel表格中,方便查找及使用(見表一)。
(二)子程序編寫
以圖一中縱斷面線為例,將線段依不同坡度分為三段,坡度分別為i1、i2、i3,邊坡點樁號分別為L1、L2,道路起點設計標高為H0,某一任意點D的樁號為K,設計標高為H。
若該任意點在第一段范圍:H=H0+Ktani1;
若該任意點在第二段范圍:H=H0+L1tani1+(K-L1)tani2;
若該任意點在第三段范圍:H=H0+L1tani1+(L2-L1)tani2+(K-L2)tani3。
將公式編輯到卡西歐fx-5800p計算器中,實現程序,并對程序進行檢測驗證,確保其計算準確。
(三)主程序編寫
以圖二中設計平面圖為例,將圓曲線以及之后的直線作為一個單元,對其進行編程。假設該設計線附近的任意一點D,通過GPS獲取的該點三維坐標(X,Y,Z),通過設計圖獲得相關數據信息包括:圓直點坐標(M,N)、直圓點樁號K[ 1 ]、圓直點樁號K[ 2 ]、直線終點樁號K[ 3 ]、圓曲線的圓心坐標(O,P)及半徑R、圓心至直圓點方位角E、圓心至圓直點方位角F、直線段方位角Q、邊坡開挖坡比W。通過CASIO可編程計算機內置程序Pol(X-O,X-P),獲得任意點D到圓曲線圓心的距離I以及方位角J,根據方位角J可判斷D點位于哪段線型,圓曲線及直線分別利用不同的計算規則,當EF且D點樁號K
猜你喜歡
電腦愛好者(2020年6期)2020-05-26 09:27:33
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
信息安全與通信保密(2016年3期)2016-08-23 01:23:56
山西省政法管理干部學院學報(2016年2期)2016-07-31 18:19:34
山西省政法管理干部學院學報(2016年2期)2016-07-31 18:19:25
中國衛生(2015年3期)2015-11-19 02:53:32
政治與法律(2014年11期)2014-03-01 02:20:40