氣動控制滑橇輸送機構的開發及應用
2016-05-30 04:31:18楊旭磊韓明軍鄭武
企業科技與發展 2016年2期
楊旭磊 韓明軍 鄭武
【摘 要】文章闡述了上汽通用五菱汽車股份有限公司為N300車型出口海外,同步開發車身焊裝線而采用的氣動控制滑橇輸送機構的工作原理及相關應用。同時分析了本次工藝的設計難點,即要求生產節拍不高、投資成本低、安全要求高、降低人員勞動強度等。從降低投資和優化工藝等方面提出了具體的實施辦法,創造性地采用壓縮空氣作為升降動力源+人工托動滑橇的解決方案,同時通過各種氣動控制、機械手段,確保員工操作的安全性、便利性,成功地解決了工藝設計難點,達到了很好的效果。
【關鍵詞】氣動控制;滑橇;輸送機構;開發及應用
【中圖分類號】TP27 【文獻標識碼】A 【文章編號】1674-0688(2016)02-0064-03
0 引言
滑橇輸送機構作為一種成熟的輸送形式,已經廣泛地應用在各大汽車廠家。由于滑橇輸送機構定位精度高、自動化程度高、生產節拍快,所以已經逐漸成為主流輸送形式。然而,縱觀大多數汽車廠家,普遍采用的是液壓或者伺服電機驅動升降機構+電機驅動滾床的滑橇輸送機構,鮮見將壓縮空氣作為升降動力源+人工托動滑橇的輸送機構。目前,上汽通用五菱汽車股份有限公司為海外項目開發的車身焊裝線成功地采用了氣動控制的滑撬機構,效果良好,生產線已經量產。下面就對此新型輸送機構做簡單闡述。
1 氣動控制滑橇機構的工作原理
工作原理如下:2#工位處于降下狀態時,工人進行焊接,焊接完成后,舉升氣缸1、2伸出,白車身隨著剪刀差機構舉升,檢測到位后,舉升機構停止,此時(必須保證3#臺也已經舉升到位)員工踩下鎖緊腳踏閥,鎖緊氣缸縮回,滑橇鎖緊機構打開,3#員工手工拉滑橇把車身輸送到3#工位,滑橇通過慣性及沖量自動進3#鎖緊機構。與此同時,2#員工手工把1#的滑橇連同白車身也一起拉到了2#工位,2#滑橇到位檢測開關檢測到滑橇后,此時2#員工手動按下下降按鈕,舉升氣缸縮回,滑橇及白車身降下,下降檢測開關檢測到滑橇下將到位后,氣缸即停止動作,用鉤子把雪橇拉回1#工位,進入下一循環。新型輸送機構工作原理如圖1所示。
2 需要解決的問題
結合以上滑橇機構的工作原理,雖然采用氣缸舉升+人工托運的模式,但是只要連接成一條循環往復的生產線,不管是自動線還是手動線,就必須解決工位間、工位內的自鎖互鎖問題。
2.1 工位間互鎖
例如,2#工位舉升到位后,2#工位的滑橇鎖緊機構只有在3#工位舉升到位后才可以解鎖,原因是只有各工位都舉升到位,2#滑橇才能在同一高度輸送白車身到3#工位,否則存在安全風險。
2.2 工位內互鎖
例如,2#及后面所有的工位的升降操作,只有在滑橇到位且所有夾具均打開情況下才能進行;而1#工位則不然,舉升操作必須保證滑橇到位,但只要保證所有夾具均打開就能進行下降操作,原因是1#工位滑橇輸送到2#工位后,雖然此時沒有滑橇,但是仍然滿足下降要求,只有下降到位,才能將零件通過吊具放到位。
3 氣動控制滑橇輸送機構的開發難點
3.1 舉升同步問題
眾所周知,空氣可以壓縮,流量較難控制,而把空氣作為動力源,就存在空氣壓縮、流量較難控制帶來的種種問題。圖1所示為氣動控制滑橇輸送機構的結構模型:在舉升氣缸1、2的共同作用下,將2個剪刀差機構舉升起來,同時2個剪刀差通過同步拉動桿連接在一起,由此實現同步。此結構中,同步拉動桿的作用很重要,因為2個舉升氣缸很難做到同步(2個氣缸的進氣流量很難調整到完全一致),而拉動桿正好彌補了此缺陷。
3.2 升降停止位置準確性問題
為解決此問題,采用了“三位五通”中壓控制閥+帶先導式單向閥的控制形式,原理圖如圖2所示,可以實現到位停止及中間任意位置的暫時停止。
3.3 滑橇升降檢測問題
升降檢測采用行程開關檢測,安全可靠且方便維護(如圖3所示)。
3.4 滑橇到位檢測問題
滑橇自動輸送生產線多數情況下采用接近開關+光電開關的形式檢測滑橇機構,我們采用氣動控制滑橇輸送機構,因此無法采用電控形式;采用氣動行程開關的檢測形式,可以實現雙向檢測,經驗證效果良好,完全滿足適用的要求(如圖4、圖5所示)。
3.5 滑橇的鎖緊解鎖問題
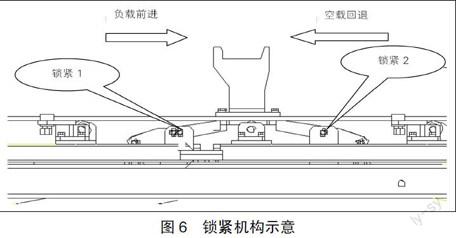
(1)滑橇鎖緊問題。滑橇常態保持鎖緊狀態,采用“二位五通”單氣控閥控制,在無外界信號輸入情況下保持鎖緊狀態,鎖緊機構分為2個部分,由前后2個氣缸分別控制,滑橇輸送分為2個狀態:負載前進;空載回退。滑橇要靠外部慣性力沖進鎖緊機構,由于負載不同慣性力也不同,所以鎖緊氣缸的鎖緊力也需要設定不同值。滑橇負載前進時,加上負載外部慣性力大,如圖6所示鎖緊1的鎖緊氣缸的鎖緊力要設定得高一些;相反,滑橇空載回退時,需要把縮緊2個氣缸的力設低一些,因為此時滑橇回退的慣性力小,如果設定值高,則滑橇不一定能推進夾緊機構。
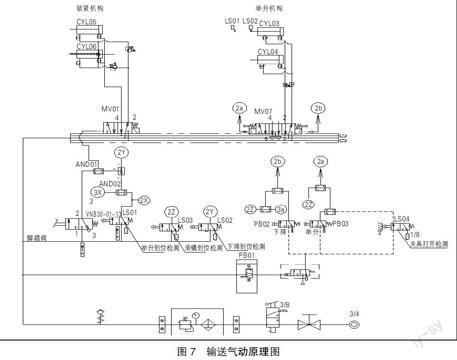
(2)滑橇解鎖問題。滑橇解鎖通過人工踩踏腳踏閥實現,其中的互鎖自鎖前文已經提到,原理如圖7所示,采用腳踏閥的優點是員工進行其他操作時通常不會碰觸到腳踏閥,避免危險的產生。
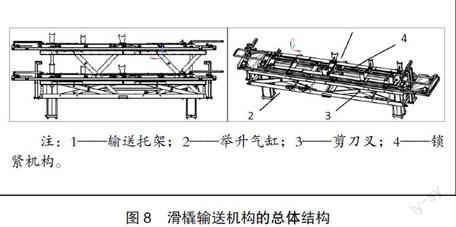
4 氣動控制滑橇輸送機構的總體結構及運行情況介紹
氣動控制滑橇輸送機構的總體結構如圖8所示,主要組成部分包括輸送托架、舉升氣缸、剪刀叉、鎖緊機構。輸送原理圖如圖7所示。
經實際運行證明,氣動控制滑橇輸送機構運行可靠、平穩,運行成本低,完全達到預期設計目標,目前此條生產線已經投入安全運行1年多。
5 結語
氣動控制滑橇輸送機構作為一種低成本投入、低節拍、低耗能的輸送方式,經實際生產驗證安全可靠,在汽車制造領域值得推廣。
參 考 文 獻
[1]韓明軍,鄭武,農振,等.氣缸順序動作控制系統設計[J].企業科技與發展,2014(4):13-16.
[2]郭聯金,潘斌.FluidSIM在液壓與氣動控制仿真實驗中的應用[J].虛擬仿真技術探索與實踐,2015,32(8).
[3]周權,張恩堅.滑橇氣動舉升機構開發設計[J].裝備制造技術,2015(3).
[4]SMC(中國)有限公司.現代實用氣動技術(第3版)[M].北京:機械工業出版社,2008.
[責任編輯:陳澤琦]
