基于行程預規劃的機車節能操縱優化控制算法
2016-05-30 04:09:15劉瑩夏雅楠
企業科技與發展 2016年2期
劉瑩 夏雅楠

【摘 要】文章介紹一種基于行程預規劃的機車節能操縱優化控制算法,針對當次運行線路和機車運行參數,預規劃機車運行速度曲線并基于實時狀態調整操縱。行程預規劃過程分為基準目標曲線獲取和實時優化曲線獲取2個步驟:{1}基于當次運行線路和機車運行參數,使用NSGA-II算法設計了雙層多目標優化方法預規劃基準目標曲線;{2}在自動駕駛時基于該基準目標曲線,使用自適應A*算法計算實時優化運行曲線。該方法在硬件在環半實物仿真測試平臺上進行了測試驗證,測試結果相比司機運行數據,平均節能效果約11.47%。
【關鍵詞】機車節能;優化操縱控制;行程預規劃;NSGA-II算法;A*算法
【中圖分類號】U279.2;U284.48【文獻標識碼】A【文章編號】1674-0688(2016)02-0027-06
擋位近年來,中國的鐵路運輸事業進入了全面建設與高速發展的時期。鐵路運輸作為運輸服務的主要途徑之一,有著運輸任務重、運量大、能源消耗總量巨大的特點。國家“十二五”規劃對我國的節能降耗提出了新的目標,將節能環保技術作為重要研究發展領域。鐵路部門也相應出臺了《鐵路“十二五”節能規劃》,大力開展鐵路節能技術的研究和推廣工作。節能減排問題,在鐵路發展建設過程中越來越受到關注。影響機車節能因素眾多,但在交路、列車編組、運行圖等因素確定之后,機車操縱就是機車節能的重要途徑。
20世紀80年代以來,澳大利亞、德國、匈牙利、丹麥、英國、日本、前蘇聯、美國等許多國家在列車節能操縱方面進行研究和試驗,總結節能的列車操縱方式,并應用微機技術研制開發列車優化操縱的微機指導系統、微機控制系統、操縱模擬系統等。美國通用電氣公司成功研制了列車運行優化系統Trip Optimizer,并取得了初步應用和推廣。德國克諾爾集團研制了LEADER駕駛員輔助系統[1],在歐洲部分鐵路得到了試驗應用。日本在列車優化操縱方面取得了長足的進步,其新干線系列列車采用速度模式曲線自動控制方式(ATC),多年來以運行安全、正點、精確定位停車、操縱平穩、乘車舒適和節能而著稱。國內眾多科研單位也開展了機車節能操縱研究應用方面的嘗試。北京交通大學于1989年研制了一套以單片機為主從結構的機車優化操縱的微機指導系統,以優化原理與模糊控制理論為基礎,離線優化計算和在線模糊控制相結合,并在北京型內燃機車上進行實驗[2]。西南交通大學研制了新型車載微機系統“列車優化操縱指導裝置”,采用了離線尋優建立優化操縱運行數據庫再結合在線實時調整的方法[3-4]。此外,北京交通大學、北京交控科技有限公司、成都暢通機車車輛技術開發有限公司、中國電子科技集團公司第三十二研究所等單位也分別就機車優化操縱進行了相關研究,取得了一定的專利成果。
本文針對既有機車系統和我國鐵路現狀,提出了一種基于行程預規劃的機車節能操縱優化控制方法,針對當次運行線路和機車運行參數,預規劃機車運行速度曲線并基于實時狀態調整操縱,既借鑒了離線優化效果,又滿足車載系統實際計算能力要求,適用于我國當前鐵路現狀。
1 機車運行模型
1.1 機車牽引計算模型
我們使用機車質點模型來描述機車動態運行信息,公式(1、2)給出了機車質點模型的定義[5]:
mρ■=f (s)-Rb(v)-Rl(s)(1)
■=v(2)
其中,m為機車質量;ρ為機車慣性質量系數;v為機車速度;s為機車位移;f (s)為當前位置的牽引力或者制動力,并滿足如下約束:設最大牽引力為ftmax(ftmax>0),最大制動力為fbmax(fbmax>0),則有-fbmaxRb(v)=m(a1+bv+cv2)(3)
公式(3)中的系數a、b、c是由機車屬性決定的,而這些屬性可以通過實驗方式獲得。Rl(s)為軌道阻力,軌道阻力是由軌道坡度、曲度、隧道等因素產生的,軌道阻力可由公式(4)給出定義[6]:
Rl(s)=m×g×sinα(s)+fc(r(s))+ft(lt(s),v)(4)
其中,g為重力加速度,α(s)、r(s)、lt(s)分別表示坡度、彎道半徑及隧道長度。值得注意的是,當機車在隧道中行駛時,會受到更大的空氣阻力,這取決于隧道形狀、隧道墻面的粗糙程度及機車外觀設計等因素。彎道阻力fc()和隧道阻力ft()可由以下公式定義[5]:
fc(r(s))=■m,r(s)≥300 m(5)
fc(r(s))=■m,(s)<300 m(6)
ft(r(s))=■m(7)
1.2 機車運行優化問題
機車運行問題可以由最優化問題解決。牽引力或制動力f(s)是關鍵的控制變量,而狀態變量是指機車的位移s和速度v。我們的優化目標是最小化機車行程時間誤差和給定行程時間條件下的機車能耗。我們同時把能耗和準時性作為優化目標,并用T來表示機車行程的預設時間,T表示機車實際運行時間。
為簡化機車模型中參數(如機車阻力和速度限制等)的處理計算過程,也為了方便優化問題的分析和數值研究,本文中把機車位移s選作獨立變量而未選用時間t。本文使用動能而不是速度v,可以方便對優化控制問題的研究。這樣做可以消除很多非線性的模型,且不影響模型的精度和一致性。因此,單位質量動能K(K=0.5v2)和位移s被選作獨立變量。機車運行可用如下連續模型表示:
mρ■=f (s)-Rb(■)-Rl(s)(8)
■=■(9)
以位移s為參數,該問題的優化目標可由以下公式表示:
JE=■(f (s)+λ■)ds(10)
JT=|T-T |(11)
機車運行所要受到的約束條件公式(12)、公式(13)及邊界條件公式(14)、公式(15)如下:
fmin≤f (s)≤fmax(12)
0≤T (s)≤Tmax(s)(13)
s(0)=sstart,v(0)=vstart(14)
s(T)=send,v(T)=vend(15)
其中,JE和JT分別為機車能耗和準時性方面的優化目標。sstart和vstart分別為行程剛開始時的機車位置和速度,send和vend分別為行程結束時的機車位置和速度。行程預設時間T往往由列車時刻表給出。
2 基于行程預規劃優化控制方法
2.1 基準目標曲線獲取
列車的運行情況需要受到多方信息的約束,比如調度指令、列車編組信息、道路條件、運行時間要求、限速條件等,因此基本目標曲線的獲取過程便是要把這些約束作為優化約束條件,把機車性能參數作為基本條件,把機車運行能耗最低或者運行時差最小作為單目標或多目標優化目標,從而計算出機車運行曲線。本系統采用離線使用NSGA-II多目標遺傳優化算法進行搜索的方法展開獲取典型情況下的基準目標運行曲線。
NSGA-II算法屬于典型的多目標遺傳算法,遺傳算法是一種通過模擬進化論中的自然選擇過程搜索最優解的方法,它的主要特點是直接對結構對象進行操作,對問題模型的結構和形式依賴較小,自動調整尋優的方向,不需要領域知識或者特定的規則。遺傳算法被廣泛地應用于組合優化、自適應控制等領域。
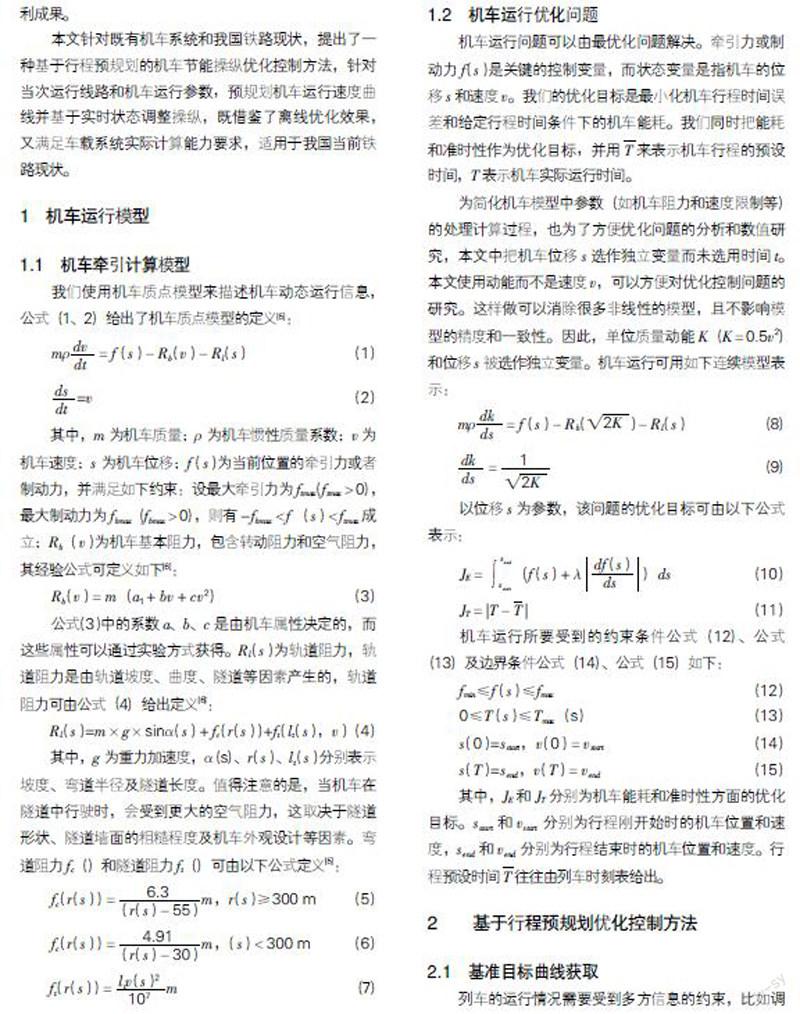
本系統使用NSGA-II算法,設計了一個雙層多目標優化操縱序列計算方法。該算法的流程圖如圖1所示。上層NSGA-II算法包含了分段策略及段與段之間銜接速度的優化計算,底層NSGA-II算法包含了機車牽引計算模型的構建和序列策略中各擋位時間分布優化搜索的計算,然后底層NSGA-II算法向上層NSGA-II算法提供最終種群中的最優個體(即最好的擋位時間分布比例)的時間消耗和油耗,上層NSGA-II算法據此進行評價并調整種群,迭代直至達到終止條件,從而最終種群的最優個體提供的是最好的速度銜接方案。根據上層NSGA-II算法得到的最好的速度銜接方案及對應的方案中由底層NSGA-II算法提供的時間分布策略,確定最終的優化操縱序列,進而實現基準目標曲線的獲取。
底層多目標計算模型以牽引計算模型和操縱方法為基礎,采用NSGA-II算法來計算鐵路機車在特定分段、特定操縱方法和特定輸入輸出速度的限定下,能達到最短時間和最少油耗的擋位選擇和比例分配的擋位序列。底層多目標計算模型在給定分段、操縱方法和輸入輸出速度的情況下,利用NSGAII方法搜索操縱方法中每種操作的具體擋位選擇和在整個操縱方法中所占的比例,利用牽引計算模型計算具體行駛過程,以達到時間最少、油耗最少并且與輸出速度的差值最小的目標。對于給定路段j,j=1,2,…,p;j為分段標識;p為總段數。底層多目標計算模型表達式如下:
minEj=∑■■△Ei·△Ti(16)
△Tj=abs(Tj-∑■■△Ti)(17)
△vendj=v(h)-vs(h)(18)
△vstartj=vs(j-1)(19)
△vendj=vs(j)(20)
v(i)≤vlim(i)(21)
其中,i=1,2,…,h;i為步長標識;h為總步長數;Ej為該段總能耗;△Ei為i步長時單位能耗;△Ti為i步長時的時間長;△Tj為機車到達終點時的時間誤差;Tj為該段計劃運行時間;△vendj為到達該段終點時的速度誤差;v(h)為終點時的速度;vs(h)為終點時計劃速度;abs()表示求絕對值;vstart(j)為第j段時的起始速度,當j=1時,vstart(j)取機車初始起始速度;vend(j)為第j段時的終止速度;vs(j)為第j段的計劃終止速度;v(i)為步長i時的機車速度;vlim(i)為步長i時的限速。
上層多目標計算模型在給定線路和其對應的分段方式及操縱方法的基礎上,為其中每一個分段分配輸入、輸出速度,并由底層多目標計算模型返回其對應的時間消耗和油耗,統計獲得總的時間消耗和油耗。通過評價一種速度分配方案的時間消耗和油耗,利用NSGA-II方法搜索得到最優的時間分配方案。其表達式如下:
minEtotal=■△Edj△Tdj(22)
△Ttotal=abs(Ttotal-■△Tdj(23)
vstart(j)=vs(j-1)(24)
vend(j)=vs(j)(25)
其中,j=1,2,…,p;j為分段標識;p為總段數;Etotal為總能耗;△Edj為第j段時能耗;△Tdj為第j段時的時間長;△Ttotal為機車到達終點時的時間誤差;Ttotal為計劃總運行時間;vstart(j)為第j段時的起始速度,當j=1時,vstart(j)取機車初始起始速度;vend(j)為第j段時的終止速度;vs(j)為第j段的計劃終止速度。
2.2 當前目標優化曲線獲取
當典型工況下的基準目標曲線獲取后,如何參照基準目標曲線,基于當前實際運行參數,實時優化生成用于指導列車實際運行的當前目標優化曲線就是一個非常現實的問題。當前優化目標曲線獲取內容部分主要實現根據臨時調度信號和機車當前運行狀態信息等參數實時計算基于調度信號的當前優化目標曲線。
本系統在處理當前目標優化曲線獲取部分時采取了一種基于自適應A*算法的鐵路機車優化操縱方法,其實施過程可以分為2個步驟:第一步,建一個物理仿真環境來模擬實時火車路線最優化問題;第二步,運用A*搜索算法來模擬獲得最優化擋位輸出序列。
首先,由于算法需要一個啟發式的函數來表征能源消耗等,因此一個物理的用于獲取火車路線最優化運行數據的仿真是必需的。這個物理仿真模型的建造包括鐵路的軌道信息,火車的數據諸如火車的質量和火車的運動學方程,以及司機歷史操縱數等。這個仿真的輸入是火車當前速度、地點、每一步火車運行的距離及被選擇的擋位。這個仿真的輸出是最終的速度、時間及消耗的燃料。
其次,A*搜索算法被廣泛地運用在最佳優先路徑判定算法中,在一個給定的初始節點到一個目標的節點中選一個花費最少的路徑。A*算法用了一個啟發式的函數來決定節點搜索的順序。這個啟發式的函數是函數g(x)和h(x)之和:
f (x)=g(x)+h(x)(26)
其中,g(x)是起始節點到當前節點x的距離,h(x)是一個容許的對從x到目標節點距離的“啟發式評估”,它不能超過到目標節點的距離。
在我們實施A*算法的過程中,我們將全段線路分割成固定長度l的小段,每一段的擋位是固定的,然而不同段l之間的距離可以是不同的,我們用函數f (E,T)作為啟發式函數,E代表能源消耗,T代表時間。
f (E,T)=g (E,T)+h (E,T)(27)
E的用處是選擇具有更低能耗的節點,T是用來保證不晚點的限制。為了簡化計算及改善效率,我們使用如下線性關系,其中Kt和Ke分別代表時間和能耗的權重。
g (E,T)=Kt×T+Ke×E(28)
當給定了一個初始的速度和地點的機車,我們用這些參數及啟發式函數f (E,T)來計算總長度L=n×l上的最優路徑,這里n是總的小段數,我們用第一個選出的擋位來在當前的小段上運行算法。重復這個步驟直到路線走完。
為了用A*算法解決火車路徑最優化問題,我們要將標準的A*算法和實際的知識領域結合起來,在這當中,最重要的步驟是設計估價函數h(x)。在這個問題中,基準目標曲線可以發揮很好的作用。一個原始的關于未來能量消耗的估價函數可以從最接近的典型工況的基準目標曲線直接獲取,記為H(E)。然而,基準目標曲線與當前實際需求的目標曲線畢竟不同,因此一個更好的估算方法是結合經驗知識和理論,對估價函數進行適當修正。
本系統中估價函數被修改如下:
h(E)=H(E)+αE×△(■mv2)(29)
其中,△(■mv2)代表運動帶來的能量改變。類似的,我們有時間上的估價函數:
h(T)=H(T)+αT×■(30)
其中,H(T)為從最接近的典型工況獲取的基準目標曲線中的未來路段時間消耗;va vg是大致的平均路程的速度;amax是在當前的計算單元中,火車運行時能得到的最大加速度;αT是權重因子,考慮加速過程不能保持不變,我們用它來平衡在時間估價上的影響。
3 實驗分析
本文基于某型內燃機車進行了模擬仿真實驗。該機車含有17個控制擋位,包含8級牽引擋(記1至8)、惰行擋位(記0)和8級制動擋位(級-1至-8)。擋位絕對值較高意味著較強的牽引力或者制動力,也就代表了更高的能源消耗。由于機車保持恒定的功率輸出,所以其能量消耗可以被看做只與操縱擋位有關。對于實驗中的機車,其牽引功率特征和制動功率特征變化分別如圖2和圖3所示。圖4給出了試驗所選路線的坡度走勢展示。
課題組基于圖1所示架構,搭建了硬件在環半實物仿真平臺(如圖5所示)。該半實物仿真測試平臺可用于測試所設計的機車節能操縱優化控制系統的運行效果,試驗過程可根據不同的實際駕駛數據,為模擬器提供負載等條件輸入。
實驗中我們選取了10組來自有經驗的駕駛員在該線路上的實際駕駛數據,這些數據蘊含了不同的負載情況。然后,我們將有經驗的司機駕車的能耗和按照本文方法實現得到的仿真結果中的能耗做比較,試驗和模擬結果見表1。從結果中可以看出,無論是重載還是輕載模式下,本文提出的機車節能操縱優化控制系統方案實施結果與司機實際駕駛相比,平均可以節約約11.47%的能源,同時與司機駕駛運行時刻表之間的平均時間偏差僅為40 s左右。試驗表明了在不同的運行條件下本文提出的機車節能操縱優化系統的處理能力。本實驗利用硬件在環仿真測試系統平臺、600 Hz Cortex-A8處理器運算得到的實驗結果顯示,當前目標曲線的計算獲取能夠實時進行,并能用于指導當前操縱擋位的輸出。
4 結論
本文為了解決智能鐵路交通運輸中的能源消耗問題,設計了一種基于行程預規劃的機車節能操縱優化控制系統。該系統既適用于既有機車改造,也適用于新造機車加裝,系統并列于司機控制器工作,針對當次運行線路和機車運行參數,預規劃機車運行速度曲線并基于實時狀態調整操縱,且可由司機方便地選擇手動或自動駕駛,在滿足系統安全駕駛需求的同時,實現了節能操縱,適用于我國當前鐵路現狀。該系統基于基準目標曲線和實時目標曲線2個步驟實現基于行程預規劃實時優化控制,系統方法在所構建的硬件在環半實物仿真測試平臺上進行了試驗,并于多組司機實際駕駛數據進行了對比研究,節能效果良好。
參 考 文 獻
[1]Eldredge D,宋海龍.列車運行與優化系統的設計[J].鐵道通信信號,2011(12):55-57.
[2]趙愛菊.機車優化操縱的微機指導系統[J].鐵道學報,1990(1):1-9.
[3]金煒東,王自力.列車節能操縱優化方法研究[J].鐵道學報,1997(6):58-62.
[4]王自力.列車節能運行優化操縱的研究[J].西南交通大學學報,1994(3):275-280.
[5]V Xuan.Analysis of Necessary Conditions for the Op-timal Control of a Train[D].Australia:University of South Australia,2006.
[6]B Mao.The Calculation and Design of Train Operation[M].Beijing,China:People Transport press,2008.
[責任編輯:鐘聲賢]
