并聯混合動力電動汽車電輔助控制策略仿真分析*
2016-05-30 03:22:14馬良君楊觀賜
現代機械 2016年2期
馬良君,楊觀賜
(貴州大學現代制造技術教育部重點實驗室,貴州貴陽550003)
?
并聯混合動力電動汽車電輔助控制策略仿真分析*
馬良君,楊觀賜
(貴州大學現代制造技術教育部重點實驗室,貴州貴陽550003)
摘要:以并聯式混合動力汽車為研究對象,分析了ADVISOR軟件中缺省的并聯混合動力電動汽車現有電輔助控制策略存在的問題,然后對其主要控制參數進行了修改,最后在ADVISOR軟件中進行仿真對比分析,仿真結果表明經過修改后的控制策略,電機效率由原來的38%上升到43%,發動機效率由原來的22%上升到27%,系統整體效率由原來的10.3%上升到12.1%,綜合油耗由原來的5.8 L/100 km下降到4.9 L/100 km,整車的性能和燃油經濟性都有了一定的提高。
關鍵詞:ADVISOR混合動力汽車電輔助控制策略仿真
0引言
節能和環保已成為當今世界的兩大主題,混合動力汽車由于其同時裝備兩種或兩種以上的動力源,利用內燃機和電動機共同驅動車輪,既繼承了純電動汽車低排放的優點,又發揚了傳統內燃機汽車功率大、續航里程長的特性,能有效地提高燃油效率,成為解決當前環境污染和能源短缺等問題切實可行的方案[3,5]。
目前,國內外應用于混合動力汽車的仿真軟件主要有:愛達荷州國家工程實驗室開發的SIMPLEV2.0、大氣環境有限公司開發的CarSim2.5.4、德克薩斯A&M大學開發的V-Elph、美國可再生能源國家實驗室開發的ADVISOR、美國Argonne國家實驗室開發的PAST,以及奧地利李斯特內燃機及測試設備公司開發的CRUISE等[1]。ADVISOR由于其免費和源代碼完全開放等優點,其用戶數量最多,目前國際上有許多企業和研究機構都使用ADVISOR軟件來作為混合動力系統仿真工具,在混合動力汽車開發的過程中,通過借用仿真軟件來開展工作,可以減少實車的實驗時間,節省研發成本[2,7]。本文首先分析了ADVISOR軟件中缺省的并聯混合動力電動汽車現有的電輔助控制策略,然后通過修改電輔助控制策略對應的M文件,重新調整控制策略的參數設置,最后使用ADVISOR軟件完成仿真對比分析。
1并聯混合動力電動汽車電輔助控制策略分析
并聯混合動力電動汽車的電輔助控制策略是在對發動機的性能和各部件的效率進行分析的基礎上而提煉出來的,其設計思想是,減少傳統發動機的功率,避免“大馬拉小車”的現象,將電機作為靈活變化的被控部件,在混合動力汽車的行駛過程中,隨工況需求變化配合發動機進行電機實時調控,電機作為輔助驅動源對發動機的輸出轉矩起到“削峰填谷”的作用,從而使得動力總成能量輸出在滿足汽車動力學要求的同時,確保電池組SOC維持在合理的范圍內,最終使整車獲得良好的燃油經濟性和排放特性[9]。電機在以下情況下使用[10]:
1)當整車車速低于某一最小車速時,電機提供驅動轉矩驅動車輪。
2)當車輛需求的轉矩超過發動機運行速度下所能提供的最大轉矩時,由電機補償轉矩。
3)如果需求的發動機轉矩使得發動機處在低效率運行區時,發動機關閉,轉矩由電動機來提供。
4)當電池的SOC較低時,發動機提供一部分轉矩用來給電池充電。
5)制動時,回收制動能量,電機處于發電狀態給電池充電。
并聯混合動力電動汽車電輔助控制策略的主要控制參數如表1。
表1
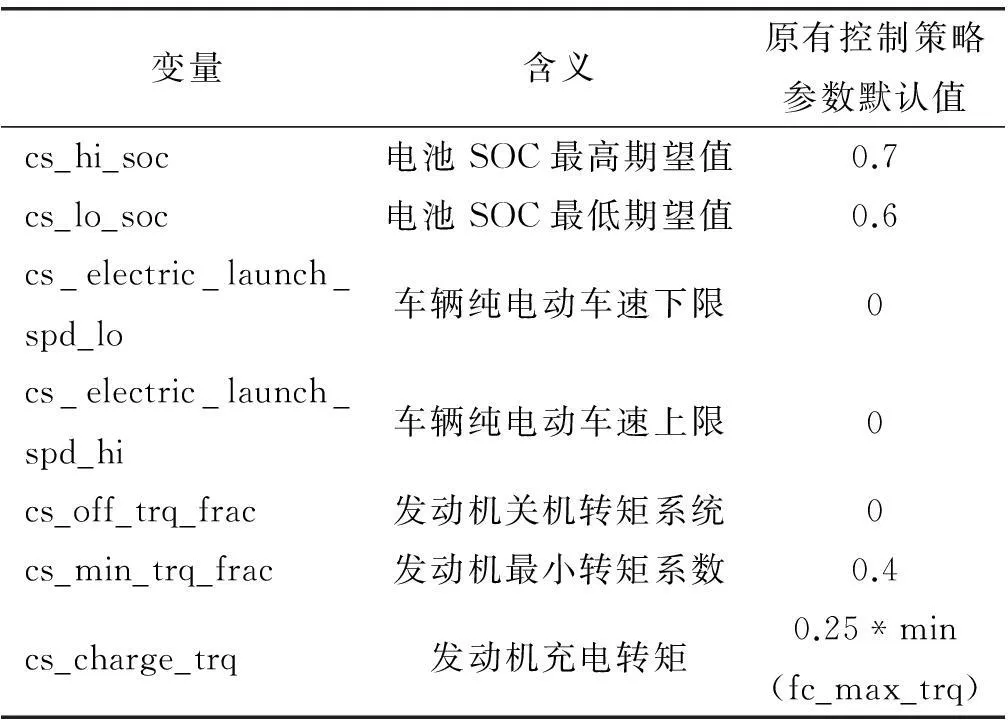
變量含義原有控制策略參數默認值cs_hi_soc電池SOC最高期望值0.7cs_lo_soc電池SOC最低期望值0.6cs_electric_launch_spd_lo車輛純電動車速下限0cs_electric_launch_spd_hi車輛純電動車速上限0cs_off_trq_frac發動機關機轉矩系統0cs_min_trq_frac發動機最小轉矩系數0.4cs_charge_trq發動機充電轉矩0.25*min(fc_max_trq)
從表1中我們可以分析出ADVISOR軟件中缺省的并聯混合動力電動汽車的電輔助控制策略參數的默認值有不盡合理之處:
1)車輛純電動車速的上限參數cs_electric_launch_spd_hi的值為0,這意味著只有當整車車速為0時才能關閉發動機,發動機在整車速度需求較低的情況下還在運轉給整車提供轉矩,這時候發動機工作在低效率區,在整車需求速度較低的時候可以關閉發動機,防止發動機工作在低效率區而帶來的燃油效率不高的問題,所以可以適當提高變量cs_electric_launch_spd_hi的值。
2)發動機關機的轉矩系數cs_off_trq_frac為0,這說明關閉發動機所需的負荷率閾值較低,應該要適當提高變量cs_off_trq_frac的值,使得當發動機的負荷率大于設定的閾值時,電機不獨立工作。
3)當電池SOC小于下限時,使電機處于發電狀態所需的發動機負荷率閾值可以適當地降低,因而可以減少發動機最小轉矩系數cs_min_trq_frac參數的值,這樣做可以給電池增加更多的充電機會。
2電輔助控制策略參數的調整及仿真對比分析
2.1電輔助控制策略參數的調整
ADVISOR中缺省的并聯混合動力電動汽車電輔助控制策略模塊對應的M文件為“/ADVISOR2002/data/control”文件夾中的PTC_PAR.m,本文在其已有的控制策略的基礎上修改其控制參數:
1)將電池SOC的最高期望值cs_hi_soc由原來的0.7修改成為0.8,當車輛在高速行駛的時候,適當提高cs_hi_soc的值可以降低車輛的燃油消耗率[4]。
2)將車輛純電動車速上限由原來的0 m/s修改成為3 m/s,當車速低于3 m/s時,發動機將關閉,由電機單獨給車輪提供轉矩。
3)將發動機關機的轉矩系數cs_off_trq_frac由原來的0修改成0.3,發動機負荷率大于0.3時,電機不獨立工作。
4)將發動機最小轉矩系數cs_min_trq_frac由原來的0.4調整為0.2,以增加給電池充電的機會。
2.2仿真結果對比分析
本文重點分析電輔助控制策略的參數調整后對電機和發動機的效率和系統的總體效率以及綜合油耗的影響,進行仿真分析的車型為ADVISOR中缺省的并聯混合動力電動汽車PARALLEL_defaults_in,仿真所采用的工況為UDDS市區循環工況,仿真結果如圖1、圖2。
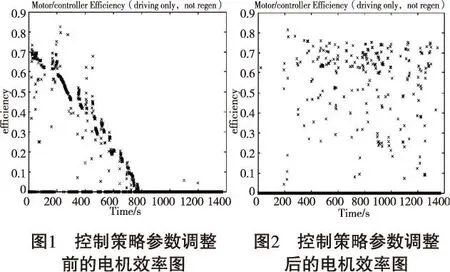
如圖1和圖2所示,在控制策略參數調整前電機的工作效率主要分布在[0,0.7]區間內,而在控制策略參數調整之后電機的工作效率主要分布在[0.1,0.8]之間,電機的工作效率相比之前有了一定的提高。
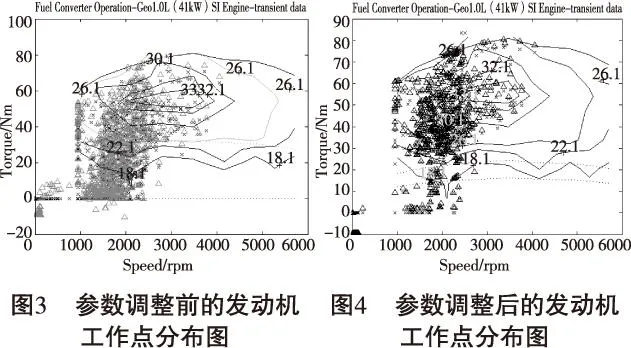
如圖3和圖4所示,在控制策略參數調整前發動機的大部分工作點分布在低效率區,而控制策略參數調整后發動機有相當一部分工作點分布在高效率區,這表明控制策略的參數經過調整后,發動機的工作點更加的理想。
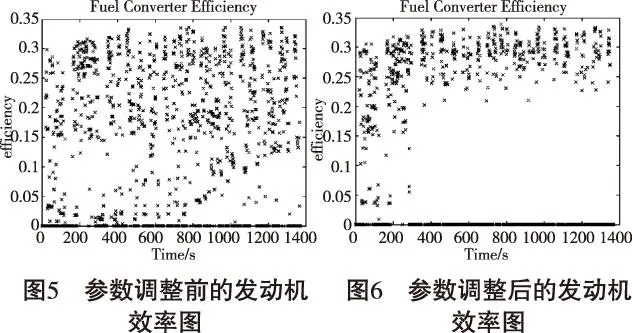
如圖5和圖6,在控制策略參數調整前發動機工作效率分布在[0,0.35]區間內,而控制策略參數調整后發動機工作效率主要分布在[0.15,0.35]區間內,這表明控制策略的參數經過調整后發動機的燃油轉化效率有了提高,有利于提高燃油經濟性。
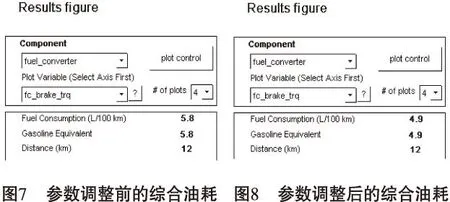
如圖7和圖8,在控制策略參數調整前整車綜合油耗Fuel Consumption 為5.8 L/100 km,而控制策略參數調整后整車綜合油耗下降至4.9 L/100 km,這表明發動機的燃油效率有了提高,有利于節能減排。
如圖9和圖10,控制策略修改前電機的效率Motor/Controller為38%、發動機的效率Fuel Converter為22%、系統整體的效率Overall System Efficiency為10.3%,而控制策略修改后電機的效率為43%、發動機的效率為27%、系統整體的效率為12.1%,可見并聯混合動力電動汽車的電輔助控制策略的參數經過調整后,其電機效率、發動機效率以及系統整體的效率都有了一定的提高,表明并聯混合動力電動汽車的各子系統相比之前都有了更好的匹配,整車的性能有了提高。
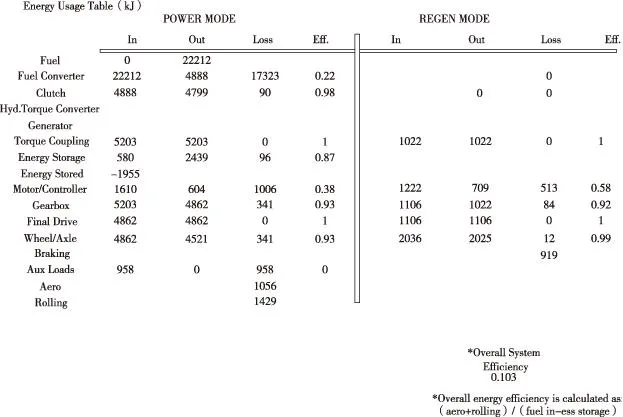
圖9 參數調整前的系統運行效率統計圖
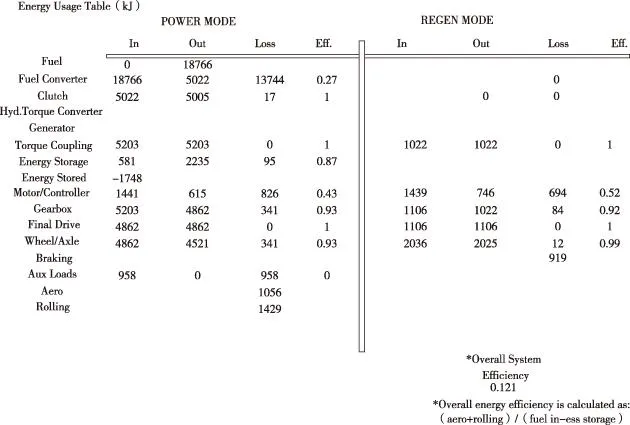
圖10 參數調整后的系統運行效率統計圖
3結論
本文首先分析了ADVISOR軟件中缺省的并聯混合動力電動汽車的電輔助控制策略,并指出了軟件中默認的電輔助控制策略參數設置的缺陷和不足,然后通過ADVISOR軟件對修改后的電力輔助控制策略進行仿真分析并和修改前進行對比,結果表明經過修改后的電輔助控制策略,其電機效率和發動機效率以及系統整體的效率都有了一定的提高,整車的綜合油耗下降,為今后對電輔助控制策略的進一步研究提供參考。
參考文獻
[1]張云,張承慧. ADVISOR仿真軟件及其在電動汽車仿真中的應用:中國自動化學會控制理論專業委員會B卷[C].中國自動化學會控制理論專業委員會,2011:4.
[2]常亮.基于ADVISOR的典型并聯混合動力汽車控制策略仿真分析[J].蘭州工業學院學報,2014,21(4):5-9.
[3]蔡玲,岳峰麗.采用ADVISOR的串聯式混合動力客車控制策略研究[J].沈陽理工大學學報,2012,31(2):46-49.
[4]張梓梁,吳森.混合動力電動汽車中SOC初始值對燃油經濟性的影響[J].科技創業家,2011(4)6.
[5]段巖波,張武高,黃震,等.混合動力汽車模糊邏輯控制策略仿真[J].內燃機工程,2004,24(2):66-69.
[6]陳瓊英.基于 ADVISOR 的混合動力公交車經濟性仿真[J].機電技術,2012(2)26-29.
[7]李歡,林川.基于ADVISOR的混合動力電動汽車控制策略仿真研究[J].廣西工學院學報,2005,16(4):27-30.
[8]王良模,柏衛軍.基于ADVISOR電動汽車的開發和仿真[J].東南大學學報(英文版),2006,22(2):196-199.
[9]李頂根,王好端.基于參數掃描算法的HEV多能源控制策略優化研究[J].汽車工程,2010,32(8):664-668.
[10]王保華,王偉明,張建武,等.并聯混合動力汽車控制策略比較研究[J].系統仿真學報,2006,18(2):401-404.
Simulation analysis of electric auxiliary control strategy for parallel hybrid electric vehicle
MA Liangjun,YANG Guanci
Abstract:Taking parallel hybrid electric vehicle as study object, we analyzed the existing problems of the electric auxiliary control strategy of the default parallel hybrid electric vehicle in ADVISOR, modified its main control parameters, and carried out simulation comparative analysis in ADVISOR. The results showed that, after the modification, the motor efficiency increased from 38% to 43%, engine efficiency increased from 22% to 27%, overall efficiency of the system increased from 10.3% to 12.1%, fuel consumption decreased from 5.8L/100km to 4.9L/100km, and the performance and fuel economy of the vehicle was improved.
Keywords:ADVISOR; hybrid electric vehicle; electric auxiliary control strategy; simulation
收稿日期:2015-09-01
通訊作者:楊觀賜(1983-),男,博士,副教授,主要研究方向:智能系統。
作者簡介:馬良君,男,湖南湘鄉人,漢族,貴州大學現代制造技術教育部重點實驗室研究生,研究方向:機械制造及其自動化。
基金項目:貴州省優秀青年科技人才培養對象專項資金項目(黔科合人字(2015)13號),貴州省科技計劃(黔科合JZ字[2014]2004號、黔科合高G字〔2014〕4001,黔科合重大專項字(2013)6020)。
中圖分類號:U469
文獻標識碼:A
文章編號:1002-6886(2016)02-0005-04
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
甘肅教育(2020年14期)2020-09-11 07:57:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
時代英語·高二(2015年1期)2015-03-16 00:08:11
汽車與新動力(2015年1期)2015-02-27 12:11:01
中國衛生(2014年11期)2014-11-12 13:11:32
汽車與新動力(2013年5期)2013-03-11 16:08:17
