外骨骼助行機器人的人機耦合運動特性*
2016-05-30 03:22:14李榮華張連東
現代機械 2016年2期
關鍵詞:老年人
陳 勇,李榮華,張連東
(大連交通大學機械工程學院,遼寧大連116028)
?
外骨骼助行機器人的人機耦合運動特性*
陳勇,李榮華,張連東
(大連交通大學機械工程學院,遼寧大連116028)
摘要:利用Motion Analysis三維動作捕捉分析系統,實時記錄人體在平地行走的運動過程,獲得了步態參數,通過分組對比,研究了老年人的行走特點。根據老年人的運動特性,設計了一種老年人外骨骼助行機器人,建立了穿戴者與外骨骼助行機器人的人機耦合模型,研究了人機耦合運動特性,為外骨骼助行機器人的耦合仿生設計提供了運動學基礎。
關鍵詞:外骨骼助行機器人人機耦合運動特性老年人仿生設計
0引言
衰老是不可抗拒的自然規律,中國的老齡化進程逐步加快,預計到2020年,60歲及以上的老年人將達到2.48億,占全國總人口15.26%[1]。老年人各種生理機能和運動機能都衰退,不同程度地喪失了運動能力和生活能力,不得不長期臥床,經常會導致褥瘡、泌尿系統感染、靜脈血栓、骨質疏松等并發癥的發生,在身心方面長年忍受著常人體會不到的痛苦,給家庭和社會帶來了巨大的負擔[2-4]。外骨骼助行機器人是一種生物-機械-電子裝置[5-7],將其穿戴在老年人的腿上,可以幫助老年人重新站立行走,恢復運動能力和生活能力,促進血液循環,防止肌肉萎縮。國內外學者對外骨骼助行機器人開展的研究主要集中在智能控制[8-10]、幾何約束[11-13]和穩定性[14-16]方面。Nilsson等人研制了一種外骨骼助行機器人,用于協助步態紊亂的使用者行走,采用角度傳感器、肌電傳感器和地面接觸力傳感器來獲得狀態信息,進行人體姿態的控制[17]。Henning等人針對脊髓損傷和中風患者研制了一種可穿戴式助行機器人,根據每個使用者不同的身體要求,將各個傳感器檢測的數據傳給控制系統,調整到最合適的力量和步行速度[18]。Jezernik等人研制了截癱患者的助行機器人,根據不同使用者對標準步態抵觸情況實時地修正步態,實現人機系統的協調運動[19]。江濟良等人針對老年人和殘疾人的用戶群體,提出了室內移動服務機器人的人機耦合協同作業機制,較好地完成了作業任務[20]。沈林勇等人檢測了下肢步行康復機器人的人機耦合力,為實現下肢步行康復機器人的操作者主動參與和康復機器人的主動控制建立了基礎[21]。杜鶴民等人根據映射關系實現信息產品的人機耦合,實現了較好的人機交互[22]。國內外學者的以往研究,缺乏對穿戴者與外骨骼助行機器人耦合關系的足夠認識,需要進一步的深入研究。將老年人的運動特性與外骨骼助行機器人耦合起來,研制符合老年人運動特性的外骨骼助行機器人,為提高人機耦合系統的運動性能提供一種仿生設計思路。
1老年人行走步態的研究
1.1測試對象
采用隨機抽樣法確定測試對象,按照年齡和性別分為12組:男性20-29歲、男性30-39歲、男性40-49歲、男性50-59歲、男性60-69歲、男性70-80歲、女性20-29歲、女性30-39歲、女性40-49歲、女性50-59歲、女性60-69歲、女性70-80歲,測試對象的基本情況如表1所示,數據用均值±標準差表示。所有測試對象的身體健康,均無肌肉、骨骼、神經和心肺疾病,不影響正常的行走姿態。在測試開始前,向每位測試對象解釋本次測試的步驟、目的和注意事項,采用自愿的形式,征得測試對象簽字同意。
表1
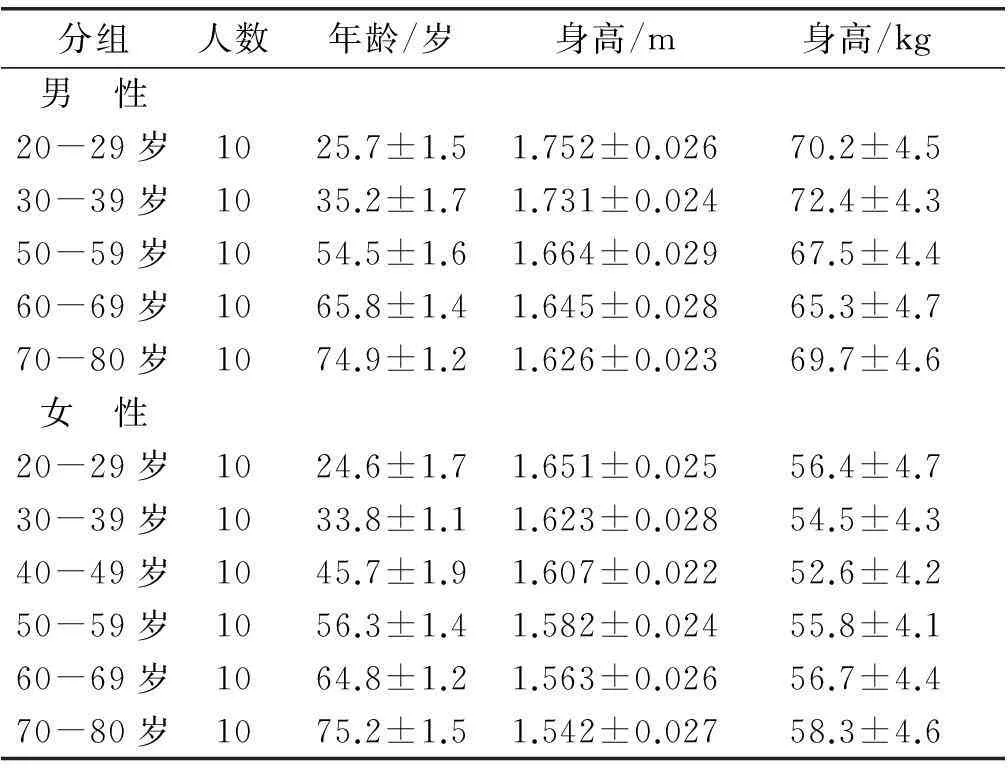
測試對象的基本情況
1.2研究方法
利用Motion Analysis三維動作捕捉分析系統,實時記錄測試對象在平地行走的步態數據。調整鏡頭的空間位置和拍攝范圍,保證完整記錄測試對象每次行走的5-6個周期的步態。測試數據采用SPSS19.0軟件進行分析,同年齡組不同性別的步態參數進行t檢驗,同性別不同年齡組的步態參數進行單因素方差分析,設定顯著性水平為P<0.05。
1.3步態參數
人體行走時,一側足跟與另一側足跟的前后距離稱為步長;一側足跟著地到該側足跟再次著地的時間稱為步態周期;一側下肢為全腳掌著地、另一側下肢擺動的時間稱為單足支撐時間;兩側下肢均為全腳掌著地的時間稱為雙足支撐時間。測試對象的步態參數如表2所示,數據用均值±標準差表示。
表2
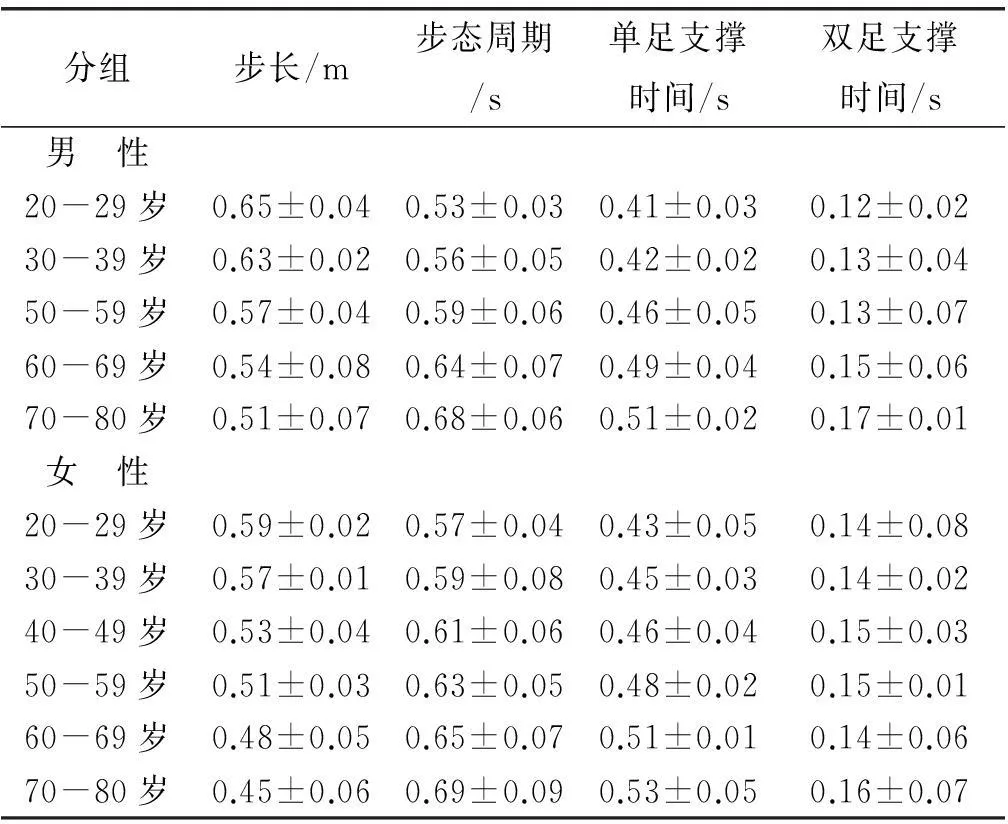
測試對象的步態參數
在表2中,隨著年齡的增長,男性和女性的步長呈現減小的趨勢,步態周期呈現增大的趨勢,單足支撐時間呈現延長的趨勢,這是由于老年人的下肢功能下降,肌肉能力衰退,腳掌著地動作緩慢,通過一側下肢支撐時間的延長來平衡老年人的不對稱能力,以免發生摔倒,體現出老年人的行走特點是“求穩不求快”。
2人機耦合特性分析
2.1結構模型
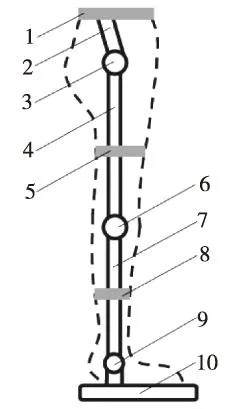
圖1 外骨骼助行機器人的結構示意圖
相對于年青人來說,老年人的單足支撐時間和雙足支撐時間占步態周期的比例增大,老年人的下肢關節要承受更大的力,老年人的身體特征和生理機能導致了行走困難,需要幫助老年人減輕站立時下肢的負重,增加老年人行走時下肢的驅動力,實現輔助行走。老年人行走的主要運動是下肢關節的屈伸運動,老年人行走的主要特點是關節的活動范圍降低。參考老年人的下肢結構和關節的運動范圍,根據仿生學原理,設計了一種老年人外骨骼助行機器人。如圖1所示,主要組成:外骨骼助行機器人的軀干部件,用于連接至穿戴者下半身,輔助穿戴者完成站立和行走,包括髖關節連桿2、大腿連桿4、小腿連桿7以及腳板10;外骨骼助行機器人的關節部件,用于連接外骨骼助行機器人的軀干部件,使得外骨骼助行機器人的軀干部件之間實現彎曲和伸展,包括連接穿戴者腰部與大腿連桿4的髖關節部件3,連接大腿連桿4與小腿連桿7的膝關節部件6,連接小腿連桿7與腳板10的踝關節部件9;外骨骼助行機器人的輔助部件,包括綁在穿戴者腰部并固定連接于髖關節連桿2的腰帶1,綁在穿戴者大腿上并固定連接于大腿連桿4的大腿繃帶5,綁在穿戴者小腿上并固定連接于小腿連桿7的小腿繃帶8。
老年人穿戴外骨骼助行機器人時,首先測量老年人大腿和小腿的長度,調整外骨骼助行機器人大腿連桿4和小腿連桿7的長度,保證外骨骼助行機器人髖關節、膝關節和踝關節的旋轉軸與老年人穿戴者相應的關節軸重合。通過腰帶1將老年人穿戴者與髖關節連桿2連接在一起,利用大腿繃帶5將老年人穿戴者的大腿與外骨骼助行機器人的大腿連桿4連接在一起,利用小腿繃帶8將老年人穿戴者的小腿與外骨骼助行機器人的小腿連桿7連接在一起。啟動髖關節連桿2的電源,驅動髖關節部件3,帶動大腿連桿4繞髖關節部件3進行轉動,大腿連桿4和小腿連桿7繞膝關節部件6進行轉動,小腿連桿7繞踝關節部件9進行轉動,從而實現外骨骼助行機器人向前邁步,對老年人穿戴者進行輔助行走。
2.2人機耦合模型
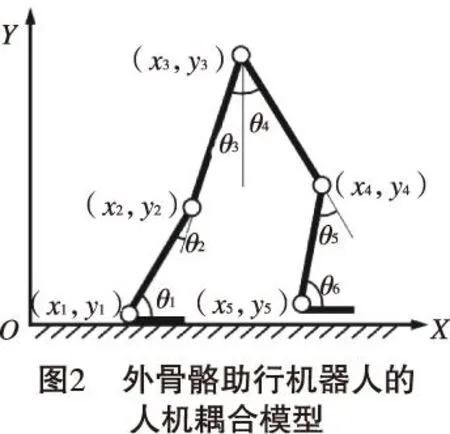
在運動過程中,穿戴者與外骨骼助行機器人耦合為一個整體,如圖2所示,θ1是支撐腿的踝關節角度,θ2是支撐腿的膝關節角度,θ3是支撐腿的髖關節角度,θ4是擺動腿的髖關節角度,θ5是擺動腿的膝關節角度,θ6是擺動腿的踝關節角度,(x1,y1)是支撐腿的踝關節坐標,(x2,y2)是支撐腿的膝關節坐標,(x3,y3)是髖關節坐標,(x4,y4)是擺動腿的膝關節坐標,(x5,y5)是擺動腿的踝關節坐標。
各個關節角度的計算公式為:
(1)
(2)
(3)
(4)
(5)
(6)
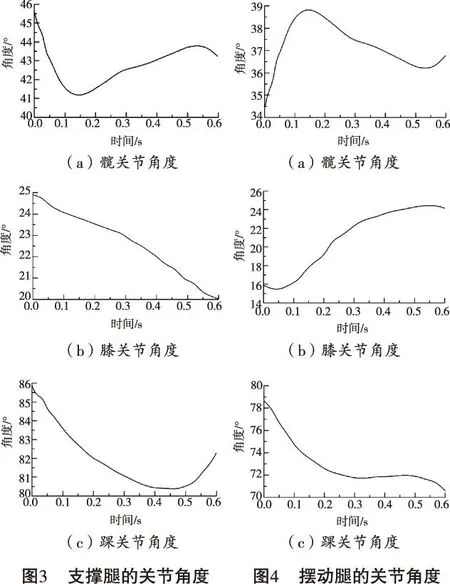
在參加步態實驗的測試對象中,隨機選取40名老年人穿戴外骨骼助行機器人,利用Motion Analysis三維動作捕捉分析系統,實時記錄老年人穿戴外骨骼助行機器人在平地行走時的運動視頻。從Motion Analysis三維動作捕捉分析系統所得到的運動視頻中,按照0.1 s的時間間隔解析成一系列運動圖像,在每個時刻的運動圖像中,根據公式(1)-(6)得到不同時刻的各個關節角度,研究老年人穿戴外骨骼助行機器人在平地行走時的人機耦合運動特性。由于篇幅有限,只對其中1名老年人(男性,55歲,身高1.68 m,體重67 kg)穿戴外骨骼助行機器人在平地行走的運動視頻進行解析,得到1個步態周期支撐腿和擺動腿的關節角度,如圖3和圖4所示。
從圖3和圖4可以得出,老年人穿戴外骨骼助行機器人在平地行走的耦合運動過程中,髖關節的運動范圍為34.5°~45.5°,膝關節的運動范圍為16.8°~24.8°,踝關節的運動范圍為70.6°~85.8°,為外骨骼助行機器人的耦合仿生設計提供了運動學基礎。
3結論
1) 對人體在平地行走的運動步態進行了研究,結果表明:隨著年齡的增長,老年人的下肢功能下降,肌肉能力衰退,腳掌著地動作緩慢,從而導致了步長的減小、步態周期的增大、單足支撐時間的延長,通過一側下肢支撐時間的延長來平衡老年人的不對稱能力,避免發生摔倒。
2) 對老年人穿戴外骨骼助行機器人的人機耦合運動特性進行了分析,結果表明:髖關節的運動范圍為34.5°~45.5°,膝關節的運動范圍為16.8°~24.8°,踝關節的運動范圍為70.6°~85.8°,為外骨骼助行機器人的耦合仿生設計提供了運動學基礎。
參考文獻
[1]Ku L E, Liu L F, Wen M J. Trends and determinants of informal and formal care giving in the community for disabled elderly people[J]. Archives of Gerontology and Geriatrics, 2013, 56(2): 370-376.
[2]Kao P C, Srivastava S. Effect of robotic performance-based error-augmentation versus error-reduction training on the gait of healthy individuals[J]. Gait & Posture, 2013, 37(1): 113-120.
[3]Giorgio C, Dino A, Fabrizio S. A novel compact torsional spring for series elastic actuators for assistive wearable robots[J]. Journal of Mechanical Design, 2012, 134(12): 67-75.
[4]Arnold E, Ward S, Lieber R. A model of the lower limb for analysis of human movement [J]. Annals of Biomedical Engineering, 2010, 38(2): 269-279.
[6]Peters A, Galna B, Sangeux M. Quantification of soft tissue artifact in lower limb human motion analysis: a systematic review[J]. Gait & Posture, 2010, 31(1): 1-8.
[7]唐志勇, 譚振中, 裴忠才. 下肢外骨骼機器人動力學分析與設計[J]. 系統仿真學報, 2013, 25(6): 1338-1344.
[8]鐘翠華, 沈林勇, 任昭霖. 基于DSP的助行外骨骼機器人步態控制[J]. 上海大學學報(自然科學版), 2012, 18(2): 151-155.
[9]楊秀霞,張毅,歸麗華,等. 下肢攜行外骨骼系統模糊自適應位置控制研究[J]. 計算機仿真, 2012, 29(3): 231-235.
[10]Tadej P, Andrej G, Tadej D. Control approaches for robotic knee exoskeleton and their effects on human motion[J]. Advanced Robotics, 2013, 27(13): 993-1002.
[11]王新亭,張峻霞,徐春. 基于步態參數的助行器設計方法[J]. 機械設計, 2013, 30(4): 97-99.
[12]劉放,程文明,鄔錢涌. 基于彈簧阻尼系統的人體外骨骼背架結構研究[J]. 機械設計, 2013, 30(4): 60-64.
[13]韓亞麗, 王興松. 下肢助力外骨骼的動力學分析及仿真[J]. 系統仿真學報, 2013, 25(1): 61-67.
[14]Samuel G, Philippe M, Wim D. Enhancing performance during inclined loaded walking with a powered ankle-foot exoskeleton[J]. Annals of Biomedical Engineering, 2014, 114(11): 2341-2351.
[15]Miao Y J, Gao F, Pan D L. State classification and motion description for the lower extremity exoskeleton [J]. Journal of Bionic Engineering, 2014, 11(2): 249-258.
[16]邵建兵,程文明,劉放,等. 五連桿外骨骼助力系統行走步態模型能量補償[J]. 機械設計, 2015, 32(1): 24-29.
[17]Nilsson A, Vreede K S, Haglund V. Gait training early after stroke with a new exoskeleton-the hybrid assistive limb: a study of safety and feasibility[J]. Journal of Neuro Engineering and Rehabilitation, 2014, 9(11): 92-102.
[18]Henning S, Cordula W, Rolf B. Gait rehabilitation machines based on programmable footplates[J]. Journal of Neuro Engineering and Rehabilitation, 2007, 4(2): 22-29.
[19]Jezernik S, Colombo G, Morari M. Automatic gait-pattern adaptation algorithms for rehabilitation with a 4-DOF robotics prosthesis[J]. IEEE Transactions on Robotics and Automation, 2004, 20(3): 574-582.
[20]江濟良,屠大維,張國棟,等. 基于認知模型的室內移動服務機器人人機耦合協同作業機制[J]. 智能系統學報, 2012, 7(3): 251-258.
[21]沈林勇,章亞男,錢晉武. 下肢步行康復訓練機器人的人機耦合力檢測:三網融合技術國際研討會論文集[C]. 三網融合技術國際研討會, 2012.
[22]杜鶴民,余隋懷. 基于人機耦合思想的信息產品設計方法研究[J]. 機械設計, 2013, 30(1): 104-106.
Man-machine coupling kinematics of the walking-aid exoskeleton robot
CHEN Yong, LI Ronghua, ZHANG Liandong
Abstract:In this study, the motions of human body while walking on level ground were captured in real-time by Motion Analysis system, the gait parameters were obtained, and the kinematic features of old people while walking were analyzed by group comparison. Based on the kinematic features of old people, a walking-aid exoskeleton robot was designed, the man-machine coupling model of the wearer and the exoskeleton robot was established, and the man-machine coupling kinematics were studied. This study could provide kinematic basis for the bionic design of walking-aid exoskeleton robots.
Keywords:walking-aid exoskeleton robot; man-machine coupling; kinematics; old people; bionic design
收稿日期:2015-08-30
作者簡介:陳勇(1979-),男,吉林省吉林市人,副教授,博士學位,碩士生導師,主要研究方向為外骨骼助行機器人。
基金項目:國家自然科學基金項目(51305055),遼寧省高等學校杰出青年學者計劃項目(LJQ2015018),遼寧省自然科學基金項目(2015020107)。
中圖分類號:TH122
文獻標識碼:A
文章編號:1002-6886(2016)02-0001-05
猜你喜歡
保健醫苑(2022年1期)2022-08-30 08:40:44
公民與法治(2022年4期)2022-08-03 08:20:26
保健醫苑(2022年6期)2022-07-08 01:25:16
保健醫苑(2022年4期)2022-05-05 06:11:20
中老年保健(2021年4期)2021-08-22 07:10:20
保健醫苑(2021年7期)2021-08-13 08:47:44
公民與法治(2020年18期)2020-10-28 08:48:10
保健醫苑(2020年1期)2020-07-27 01:58:14
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:28
海峽姐妹(2018年1期)2018-04-12 06:44:24
