無軸承異步電動機懸浮子系統獨立魯棒控制方法研究
2016-05-10 08:40:16孫宇新錢忠波
電工技術學報 2016年7期
關鍵詞:系統
孫宇新 錢忠波
(江蘇大學電氣信息工程學院 鎮江 212013)
?
無軸承異步電動機懸浮子系統獨立魯棒控制方法研究
孫宇新錢忠波
(江蘇大學電氣信息工程學院鎮江212013)
摘要為實現無軸承異步電動機(BIM)的動態解耦控制,基于徑向基函數神經網絡(RBFNN),提出一種懸浮子系統獨立魯棒控制方法。應用RBFNN辨識系統模型不確定因素和外界干擾,基于HJI不等式原理設計RBFNN魯棒控制器,實現懸浮子系統的動態獨立解耦控制,并提高系統的穩定性和抗干擾性能。仿真和實驗結果表明所提出的BIM控制系統具有良好的動靜態性能。
關鍵詞:無軸承異步電動機懸浮子系統獨立控制魯棒控制器HJI不等式徑向基函數神經網絡
0引言
依靠轉矩繞組和懸浮力繞組磁場的共同作用,無軸承異步電動機(Bearingless Induction Motor,BIM)可實現籠型轉子的穩定懸浮,具有結構簡單、易于弱磁以及可靠性高等優點,非常適合應用于高速精密數控機床及高壓密封泵等高速驅動的高新技術領域,因而受到了國內外學者的廣泛關注。然而,BIM的多套繞組之間存在復雜的電磁關系,使得解耦控制成為實現BIM穩定懸浮和轉矩輸出的關鍵問題。
自BIM被提出以來,眾多專家學者已對懸浮力和轉矩解耦控制進行了大量研究。轉矩繞組氣隙磁場定向控制方法是目前控制無軸承異步電動機較為成熟的控制方法之一,但該方法需要在兩套繞組控制子系統之間傳遞轉矩繞組的氣隙磁鏈信息,所以并未實現真正意義上的獨立解耦控制[1]。其次,因其本身機理的制約存在最大轉矩限制[2],從而影響其在重載和大功率條件下的應用。此外,逆系統、支持向量機和靜態神經網絡方法也被陸續應用到非線性系統解耦控制中[3-7]。然而,傳統逆系統解耦控制方法需要獲得被控對象的精確數學模型,而無軸承異步電動機屬于多變量、非線性、強耦合系統,其數學模型隨其運行狀態隨時發生改變,導致傳統逆系統方法很難在實際中得到應用。基于靜態神經網絡的逆系統解耦控制方法能夠使無軸承異步電動機系統獲得良好的動靜態性能[3-4,8],但其系統結構復雜、輸入變量多、實現相對困難。文獻[9]提出將滑模觀測器應用到無位置和無速度傳感器控制中,擺脫了傳統基于電動機模型的無速度、無位置傳感器對電動機參數的依賴,增強了系統的魯棒性能。文獻[10]對短路容錯控制在無軸承永磁同步電動機中的應用進行了可行性分析,為提高無軸承電動機控制安全性和魯棒性提供了一條新思路。文獻[11]提出了一種懸浮子系統獨立控制方法,通過電壓模型辨識方法辨識出懸浮繞組獨立控制條件下的轉矩繞組氣隙磁鏈幅值和相位,使轉矩繞組擺脫懸浮原理約束,提高了調速方法的靈活性。更為重要的是,這種方法不僅能實現懸浮力和轉矩之間解耦,使得BIM具有良好的動靜態性能,還具有算法簡單及極易實用化等特點。
為實現無軸承異步電動機的動態解耦控制,本文提出了一種基于徑向基函數(Radial Basis Function Neural Network,RBFNN)和HJI(Hamilton-Jacobi-Isaacs)不等式原理的懸浮子系統獨立魯棒控制方法。該方法通過氣隙磁鏈辨識器辨識出實現獨立控制所必須的精確氣隙磁鏈,同時基于HJI不等式原理設計了RBFNN魯棒控制器,最后建立控制系統以實現懸浮繞組子系統的獨立控制,使控制系統具有更強的抗干擾能力;轉矩繞組子系統則通過普通變頻器控制,增強了控制方法的實用性。仿真結果和實驗表明,該獨立控制方案能夠使無軸承異步電動機系統具有良好的控制性能和較強的魯棒性。
1無軸承異步電動機基本機理
1.1基本原理
BIM集磁軸承和電動機功能于一體,能同時實現轉子懸浮和旋轉功能,是特種傳動應用領域采用無軸承支承運行的最具有發展前途的方案之一[12]。從結構上分析,無軸承異步電動機通過在原有的定子繞組中添加一套徑向力繞組,通過兩套不同極對數繞組磁場的相互作用,使異步電動機氣隙合成磁場的對稱性發生改變,從而在轉子上產生可控徑向力,實現轉子的穩定懸浮和旋轉。
懸浮繞組的引入打破了電動機原有旋轉磁場的平衡,使得電動機氣隙中一個區域內的磁場增強,其對稱區域的磁場減弱,產生的麥克斯韋力指向磁場增強的方向。如圖1所示,分別向轉矩控制繞組和懸浮控制繞組中通入電流I1和I2,產生磁鏈ψ1和ψ2。
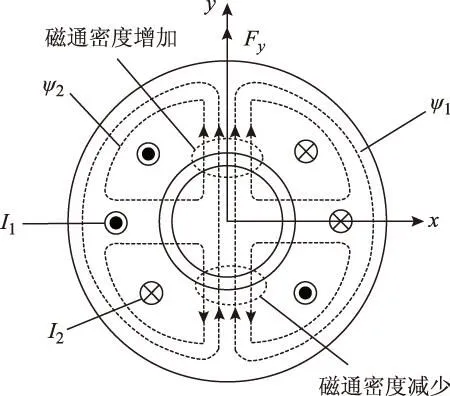
圖1 徑向懸浮力產生原理Fig.1 Generation principle of radial suspension force
在忽略負載的情況下,由于在氣隙上側ψ1和ψ2同向,合成磁通密度會增加;在氣隙下側ψ1和ψ2反向,則合成磁通密度會減少,從而磁拉力的分布發生改變,產生沿y正方向的徑向懸浮力Fy。在懸浮控制繞組中通入反向電流,可產生沿y負方向的徑向懸浮力。同理,沿x軸方向的徑向懸浮力Fx可通過在懸浮控制繞組中通入與I2垂直的電流獲得。
1.2徑向懸浮力數學模型
當懸浮繞組極對數P2與轉矩繞組極對數P1滿足P1=P2+1時,洛倫茲力(用F1表示)和麥克斯韋力(用Fm表示)方向相同,令F(F=Fm+Fl)為懸浮力的可控分量,在d、q軸旋轉磁場坐標系下用磁鏈表示的懸浮力公式為
(1)
式中,ψd1、ψq1分別為氣隙磁鏈分量;K=Km+Kl,其中Km為麥克斯韋常數,Kl為洛倫茲力常數;下標1、2分別為對應轉矩繞組和懸浮控制繞組;下標s為對應定子分量。
當轉子發生偏心時,因氣隙不均勻造成氣隙磁場的不平衡會產生偏心磁拉力,這是一種固有的麥克斯韋力,其表達式為
(2)
傳統BIM徑向懸浮力模型多基于理想情況下建立,從而忽略了系統模型不確定性和外界干擾。將系統模型不確定性和外界干擾考慮其中,轉子在徑向力和外界力作用下的位移運動方程表示為
(3)
式中,m為轉子質量;dx、dy分別為模型不確定性以及外界干擾。
對氣隙磁場進行定向控制,則有
ψd1=ψ1, ψq1=0
(4)
將式(4)代入式(1)可簡化為
(5)
由式(5)可得出懸浮繞組電流與懸浮力之間的關系,根據懸浮繞組電壓和電流之間的非線性關系再映射出Ud2s和Uq2s。
2氣隙磁鏈辨識方法
由于徑向懸浮力的控制只與轉矩繞組氣隙磁鏈的幅值和相位相關,因此若能有效探測或辨識該磁鏈的幅值和相位,便能實現懸浮子系統的獨立控制[11]。因此,對氣隙磁鏈幅值和相位的精確辨識是能夠實現獨立控制的關鍵。
2.1轉矩繞組氣隙磁鏈數學模型
轉矩繞組的定子磁鏈在靜止等效α、β坐標系下有
(6)
式中,ψα1s、ψβ1s分別為定子磁鏈在α、β軸方向分量;Uα1s、Uβ1s分別為定子電壓在α、β軸方向分量;iα1s、iβ1s分別為定子電流在α、β軸方向分量;R1s為轉矩繞組的定子電阻。
轉矩繞組氣隙磁鏈在α、β坐標系中滿足
(7)
式中,L1sl為轉矩繞組的定子漏感。
2.2氣隙磁鏈辨識電壓模型法
電壓模型法通過式(6)和式(7)計算氣隙磁場,圖2為氣隙磁鏈辨識框圖。
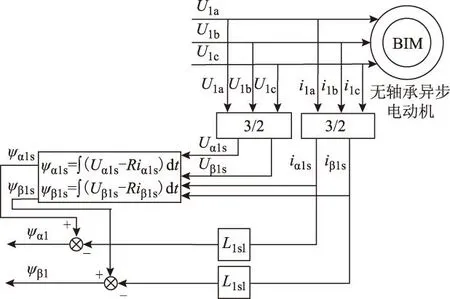
圖2 氣隙磁鏈辨識框圖Fig.2 Identification of airgap flux linkage
采用圖2所示的氣隙磁鏈辨識模型可通過采集電壓電流信號在線辨識出氣隙磁鏈值,為實現懸浮子系統獨立控制提供前提。
3獨立魯棒控制系統
文獻[13]研究表明帶模有界條件的非線性不確定系統,在適當的正則性假設下,其魯棒可鎮定性完全可由一個擴展的HJI微分不等式是否存在正解來確定。本文基于HJI不等式原理對無軸承異步電動機懸浮子系統進行控制,以實現轉矩子系統采用通用變頻器控制時懸浮子系統獨立控制,且轉矩子系統以及懸浮子系統具有較強的魯棒性。
3.1HJI不等式定理
針對如下模型
(8)
式中,d為外界干擾;z為系統的評判指標。
定義:對于信號d(t),其L2范數為
(9)
該范數可衡量d(t)的能量大小。
為了評判系統的干擾抑制能力,定義如下性能指標
(10)
式中,J為系統的H∞增益,表示系統擾動抑制性能,J越小表示系統的擾動抑制性能越強。
根據文獻[14,15]中定理2和式(8),HJI定理可描述為:對一個正數γ,如果存在一個正定且可微的函數L(x)≥0且
(11)
當式(11)對于任意的d都成立,則J≤γ。
3.2魯棒控制器設計
將HJI不等式應用于神經網絡魯棒控制器中能有效改善系統穩定性,因此本文提出一種基于HJI不等式原理的魯棒控制器,通過RBFNN辨識系統模型不確定因素以及外界因素[16],以實現對BIM懸浮子系統的獨立解耦控制。將本文閉環系統式(3)改寫為矢量形式
(12)
式中,z為位移矢量。
假設理想跟蹤位移為zd,跟蹤誤差e=z-zd,設計前饋控制律為
(13)
式中,u為反饋控制律。
將式(13)代入式(12)可得

(14)
采用RBF神經網絡逼近d(z),其表達式為
(15)

綜合式(14)和式(15)得
(16)
定義
(17)
式中,若α>0,則
(18)
利用HJI不等式將式(18)寫成如下形式
(19)
式中
設計如下自適應律
(20)
式中,η為正實數。
設計反饋控制律為
(21)
由HJI不等式定理可得,設計后的閉環系統滿足J≤γ, 是穩定的[17]。
3.3控制系統設計
為了實現系統良好的動靜態性能,本文提出了一種基于RBFNN和HJI不等式的自適應魯棒控制器的懸浮子系統獨立魯棒控制系統,如圖3所示,其中M=1/Kψ1。
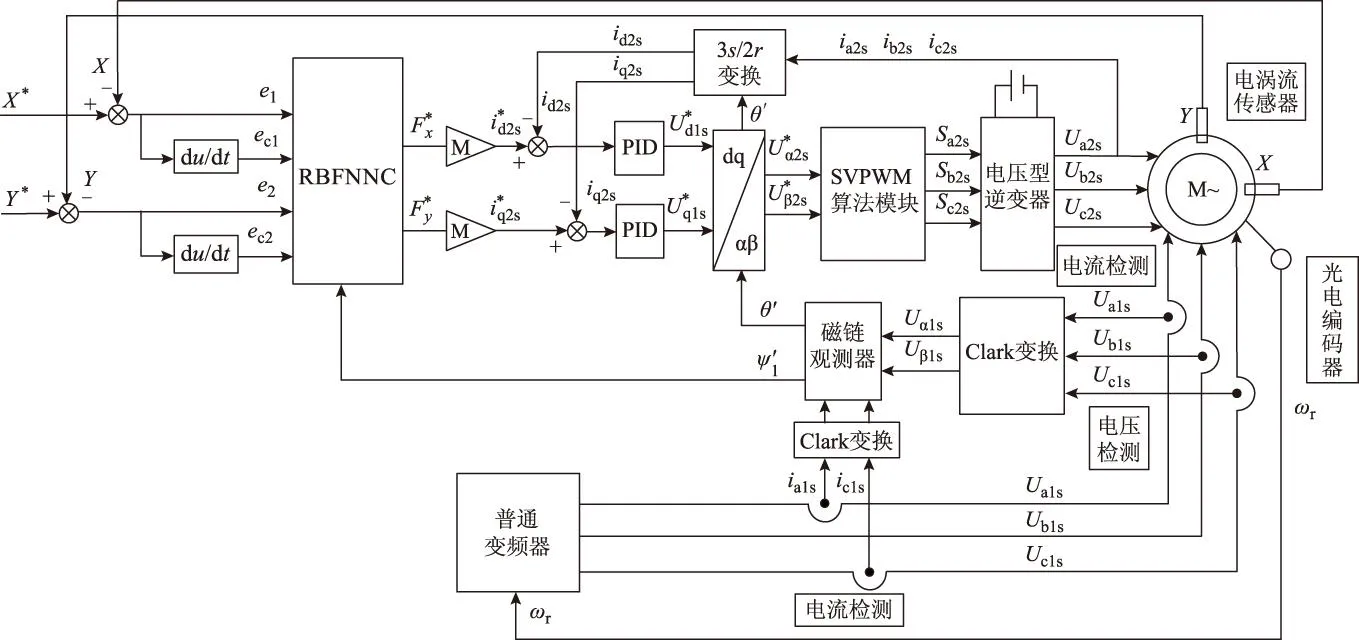
圖3 懸浮子系統獨立魯棒控制系統框圖Fig.3 Independent robust control system for levitation subsystem
與傳統氣隙磁場定向以及傳統懸浮子系統獨立控制系統相比,本文創新點在于基于HJI不等式原理的魯棒控制器設計及懸浮子系統獨立魯棒控制系統的建立,具有如下特點:
1)運用氣隙磁鏈觀測辨識出氣隙磁鏈值,使實現高性能獨立控制成為可能,轉矩子系統則可使用通用變頻器控制,增強了BIM的實用性。
2)設計基于HJI不等式原理和RBFNN的魯棒控制器取代傳統的PID控制器,減少了參數調節,增強了系統的魯棒性能和控制準確度。
3)內環采用PID電流滯環,加快了反應速度。
4)采用SVPWM算法代替傳統的SPWM算法,增加了電壓利用率,具有一定優勢。
4系統仿真與實驗分析
以一臺無軸承異步電動機試驗樣機為研究對象,首先通過Matlab建立仿真模型來驗證本文提出的控制策略的有效性。控制器取4-7-2結構的RBF神經網絡,η=1 500,α=20,γ=0.05,高斯函數參數ci和bi分別為[-1.5-1-0.500.511.5]和10,并進行仿真實驗。系統參數如表1所示。
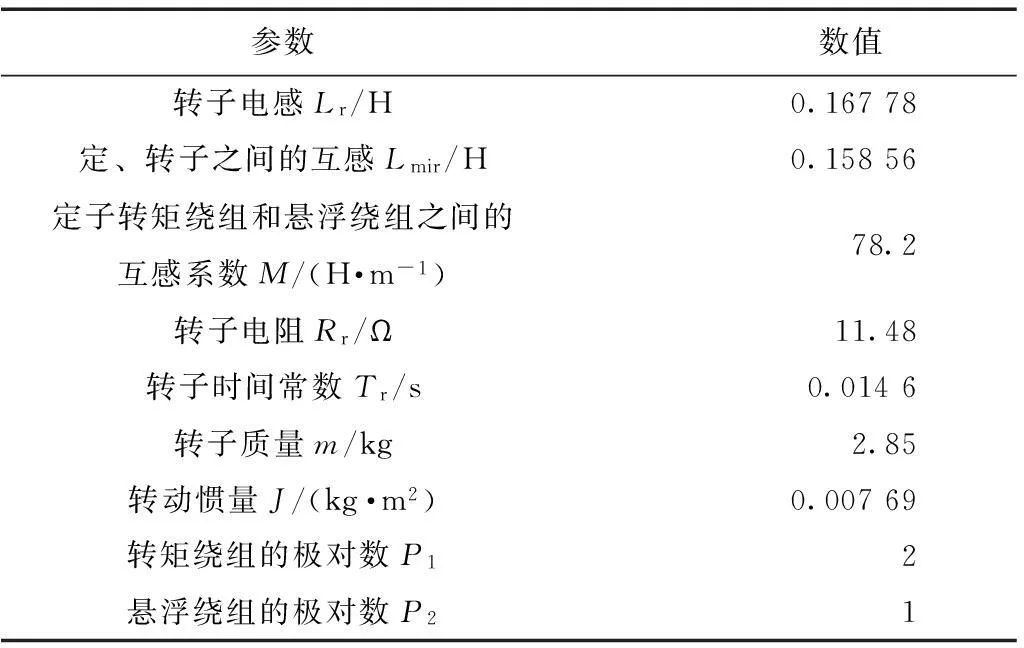
表1 電動機參數
由于徑向懸浮力的控制只與轉矩繞組氣隙磁鏈的幅值和相位有關,采用獨立控制后轉矩子系統擺脫懸浮原理束縛,所以轉矩繞組就近似于一個獨立的異步電動機模型,仿真中采用變頻器控制轉矩繞組,轉子轉速波形如圖4所示。在0.5 s給定轉速由3 600 r/min突加至7 200 r/min。圖4中,電動機起動后,轉子轉速迅速到達給定轉速3 600 r/min,調節時間約為0.01 s,幾乎沒有超調,且保持穩定;當轉速給定突變至7 200 r/min,轉子轉速迅速響應,調節時間約為0.01 s,具有良好的動靜態性能。懸浮繞組由本文提出的獨立魯棒解耦控制算法控制,如圖5所示,設置轉子質心x軸徑向位移初始值為-0.08 mm,y軸徑向位移初始值為-0.25 mm,初始期望徑向位移均為0 mm。由圖5a、圖5b可知,電動機起動后,轉子質心迅速到達給定中心點位置,并保持穩定,位移超調小于0.05 mm,超調時間約為0.06 s。
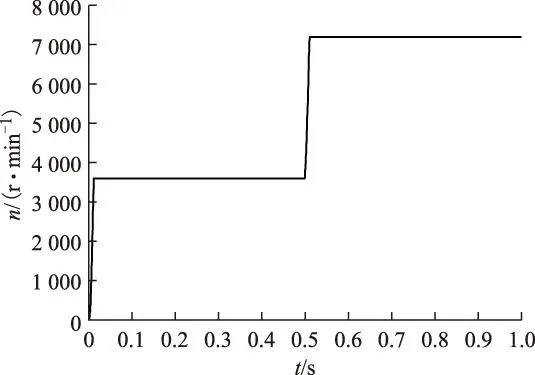
圖4 轉子轉速波形Fig.4 Speed waveform of rotor

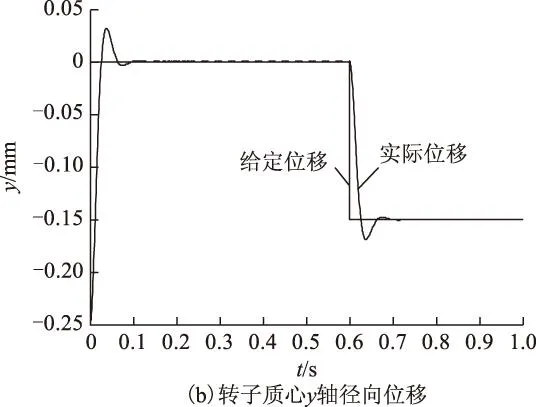
圖5 采用本文獨立魯棒控制方法仿真結果Fig.5 Simulating results using independent robust control method
其次,為了檢驗徑向懸浮力子系統在x、y軸方向上的徑向懸浮力(徑向位移)是否實現解耦控制,在0.8 s調整x軸徑向位移為0.15 mm,在0.6 s調整y軸徑向位移為-0.15 mm,并與采用傳統滯環控制方法進行比較,結果如圖5和圖6所示。首先比較圖5a和圖5b可發現,當x軸徑向位移發生突變時,y軸徑向位移并未受到影響;當y軸徑向位移發生突變時,x軸徑向位移也未受到影響,因此可得出使用RBFNN魯棒控制器能夠實現x軸和y軸徑向力解耦,且系統具有良好的動靜態性能。由圖4、圖5可見,當轉速發生突變時,徑向位移并未發生明顯變化;當徑向位移發生突變時,轉速也未發生明顯變化,仿真表明懸浮子系統獨立魯棒控制方法能夠實現轉矩和懸浮力之間的解耦。
采用傳統滯環控制時轉子徑向位移最大超調約為0.11 mm,最大超調時間約為0.12 s。比較圖5和圖6可見,在本文提出方法的控制下,懸浮子系統在運行時轉子抖動更小,懸浮性能優異,且具有更好的抗干擾能力。
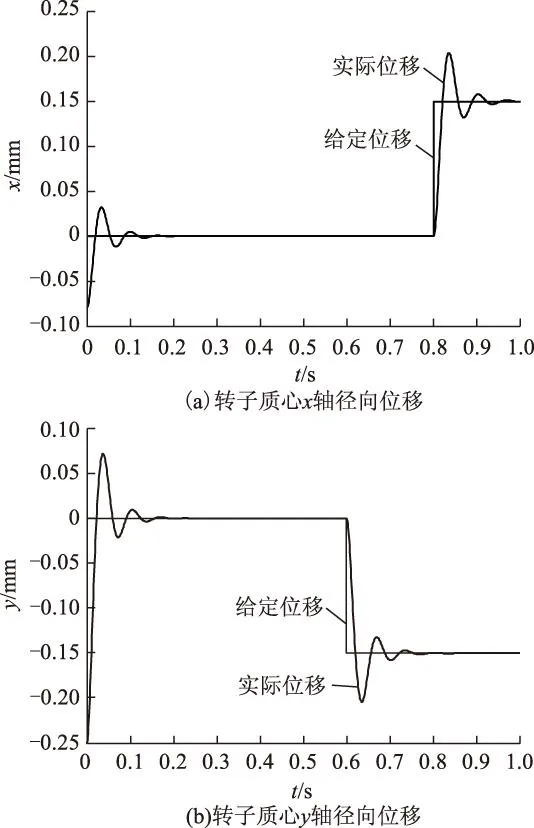
圖6 采用傳統滯環控制方法仿真結果Fig.6 Simulation results using hysteresis control method
最后,采用本文控制策略,利用實驗室無軸承異步電動機數字控制平臺對樣機進行控制,圖7為無軸承異步電動機數字控制平臺。
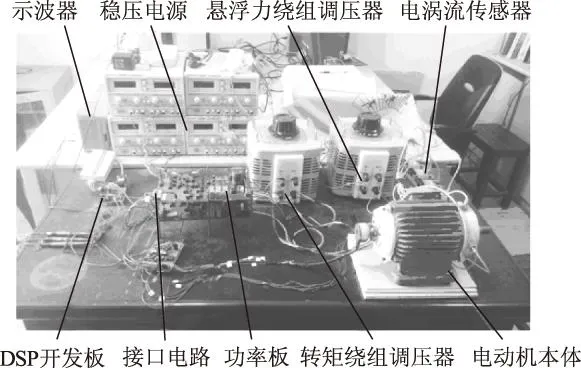
圖7 無軸承異步電動機數字控制平臺Fig.7 Digital platform for BIM
如圖8所示,實驗結果表明當轉速變化時,電動機轉子實現了穩定懸浮,且位移誤差小于±50 μm,證明了本文所提方法實現解耦控制的有效性。比較仿真波形和實驗波形可知,由于仿真時電動機模型理想化,而實際中電動機加工準確度不高引起轉子質量分布不平衡,導致仿真波形的波動程度并沒有實驗波形明顯。此外轉子質量分布不平衡導致轉子質心不在x、y坐標系原點位置,轉子轉動時由于x、y軸垂直相位差為90°,在實驗中體現為x、y軸方向位移波形相差一定角度,且轉速越高波動頻率越高,其深層次原因還需進一步研究。為了驗證該方法的魯棒性,在無軸承異步電動機穩定懸浮時,沿徑向對軸施加一定壓力。如圖9所示,突加擾動時,徑向位移發生微小變化,短時間內能夠迅速恢復到穩定狀態,表明能夠實現較強的魯棒控制。此外當y軸方向位移發生突變時,x軸方向位移變化不明顯,說明能夠實現徑向力動態解耦控制。

圖8 轉速變化時轉子質心位移實驗波形Fig.8 Experimental waveform of rotor centroid displacement when the speed changes
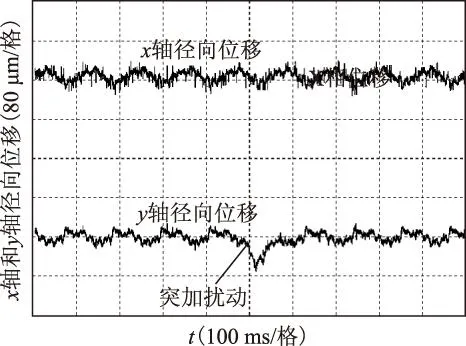
圖9 突加擾動時轉子質心位移實驗波形Fig.9 Experimental waveform of rotor centroid displacement when interrupted
5結論
針對無軸承異步電動機傳統懸浮力繞組獨立控制系統中魯棒性差等缺陷,本文提出了懸浮力子系統獨立魯棒解耦控制方法。首先通過磁鏈辨識方法辨識出懸浮子系統獨立控制所必須的氣隙磁鏈值;同時基于HJI不等式原理設計了RBFNN魯棒控制方法替代傳統滯環控制方法,提高控制系統的抗干擾能力及控制性能。仿真和實驗結果表明,采用該控制方法不僅能提高無軸承異步電動機的實用性,且控制系統具有良好的動靜態性能,為無軸承異步電動機解耦控制提供了一條新思路。
參考文獻
[1]Chiba A,Akamatsu D, Fukao T,et al.An improved rotor resistance identification method for magnetic field regulation in bearingless induction motor drives[J].IEEE Transactions on Industrial Electronics,2008,55(2):852-860.
[2]鄧智泉,王曉琳,張宏荃,等.無軸承異步電機的轉子磁場定向控制[J].中國電機工程學報,2003,23(3):89-92.
Deng Zhiquan,Wang Xiaolin,Zhang Hongquan,et al.The nonlinear control of bearingless induction motors based on the motor rotor flux orientation[J].Proceedings of the CSEE,2003,23(3):89-92.
[3]Sun Xiaodong,Chen Long,Yang Zebin,et al.Speed-sensorless vector control of a bearingless induction motor with artificial neural network inverse speed observer[J].IEEE/ASME Transactions on Mechatronics,2013,18(4):1357-1366.
[4]Chiba A,Santisteban J A.A PWM harmonics elimination method in simultaneous estimation of magnetic field and displacements in bearingless Induction motors[J].IEEE Transactions on Industry Applications,2012,48(1):124-131.
[5]孫曉東,朱熀秋.基于神經網絡理論無軸承異步電動機解耦控制[J].電工技術學報,2010,25(1):43-49.
Sun Xiaodong,Zhu Huangqiu.Decoupling control of bearingless induction motors based on neural network inverse system method[J].Transactions of China Electrotechnical Society,2010,25 (1):43-49.
[6]孫玉坤,周云紅,嵇小輔.磁懸浮開關磁阻電機的神經網絡逆解耦控制[J].中國電機工程學報,2011,31(30):117-123.
Sun Yukun,Zhou Yunhong,Ji Xiaofu.Decoupling control of bearingless switched reluctance motor with neural network inverse system method[J].Proceedings of the CSEE,2011,31(30):117-123.
[7]劉國海,孫玉坤,張浩,等.基于神經網絡的磁懸浮開關磁阻電動機的解耦控制[J].電工技術學報,2005,20(9):39-43.Liu Guohai,Sun Yukun,Zhang Hao,et al.Decoupling control of bearingless switched reluctance motors based on neural network inverse system[J].Transactions of China Electrotechnical Society,2005,20(9):39-43.
[8]Zhu Huangqiu,Zhou Yang,Li Tianbo,et al.Decoupling control of 5 degrees of freedom bearingless induction motors using α-th order inverse system method[J].Acta Automatica Sinica,2007,33(3):273-278.
[9]程帥,姜海博,黃進,等.基于滑模觀測器的單繞組多相無軸承電機無位置傳感器控制[J].電工技術學報,2012,27(7):71-77.
Cheng Shuai,Jiang Haibo,Huang Jin,et al.Position sensorless control based on sliding mode observer for multiphase bearingless motor with single set of windings[J].Transactions of China Electrotechnical Society,2012,27(7):71-77.
[10]王曉琳,任新宇,鄧智泉,等.短路容錯控制在多相無軸承永磁同步電機中的可行性分析[J].電工技術學報,2012,27(3):105-118.
Wang Xiaolin,Ren Xinyu,Deng Zhiquan,et al.Feasibility of fault-tolerant control of multi-phase permanent magnetic bearingless motors with short-circuited phases[J].Transactions of China Electrotechnical Society,2012,27(3):105-118.
[11]鄧智泉,王曉琳,李冰,等.無軸承異步電機懸浮子系統獨立控制的研究[J].中國電機工程學報,2003,23(9):107-111.
Deng Zhiquan,Wang Xiaolin,Li Bing,et al.Study on independent control of the levitation subsystem of bearingless induction motors[J].Proceedings of the CSEE,2003,23(9):107-111.
[12]孫曉東,陳龍,楊澤斌,等.考慮偏心及繞組耦合的無軸承永磁同步電機建模[J].電工技術學報,2013,28(3):64-70.Sun Xiaodong,Chen Long,Yang Zebin,et al.Modeling of a bearingless permanent magnet synchronous motor considering rotor eccentricity and coupling relationship of windings[J].Transactions of China Electrotechnical Society,2013,28(3):64-70.
[13]王連圭,費樹岷.非線性不確定系統的魯棒鎮定與HJI微分不等式[J].控制理論與應用,2000,17(5):758-762.
Wang Liangui,Fei Shumin.Robust Stabilization for nonlinear uncertain systems and HJI differential inequality[J].Control Theory and Applications,2000,17(5):758-762.
[14]De Doncker R W,Novotny D W.The universal field oriented (UFO) controller[J].IEEE Transactions Industry Applications,1994,30(1):92-100.
[15]van der Schaft A J.L2-gain analysis of nonlinear systems and nonlinear state feedback H∞control[J].IEEE Transactions on Automatic Control,1992,37(6):770-784.
[16]夏長亮,祁溫雅,楊榮,等.基于RBF神經網絡的超聲波電機參數辨識與模型參考自適應控制[J].中國電機工程學報,2004,24 (7):117-121.
Xia Changliang,Qi Wenya,Yang Rong,et al.Identification and model reference adaptive control for ultrasonic motor based on RBF neural network[J].Proceedings of the CSEE,2004,24(7):117-121.
[17]劉金琨.RBF神經網絡自適應控制MATLAB仿真[M].北京:清華大學出版社,2014.
孫宇新女,1968年生,副教授,研究方向為無軸承電機控制。
E-mail:syx4461@ujs.edu.cn
錢忠波男,1991年生,碩士,研究方向為無軸承異步電動機控制。
E-mail:1078903061@qq.com(通信作者)
Study on Independent Robust Control of Levitation Subsystem for Bearingless Induction Motors
SunYuxinQianZhongbo
(School of Electrical and Information Engineering of Jiangsu UniversityZhenjiang212013China)
AbstractTo realize the dynamic decoupling control for the high-speed bearingless induction motor (BIM), an independent robust control method for the levitation subsystem is proposed based on the radial basis function neural network (RBFNN). The parameter uncertainty and external disturbance of the BIM are identified by the RBFNN. And then the RBFNN robust controller is designed based on the HJI (Hamilton-Jacobi-Isaacs) theory to realize the dynamic decoupling and independent control for the levitation subsystem in order to improve its operation stability and disturbance attenuation performance. The simulation and experiment results show the satisfied dynamic and static performances of the presented control system for the BIM.
Keywords:Bearingless induction motor,the levitation subsystem,independent control,robust controller,Hamilton-Jacobi-Isaacs inequality,radial basis function neural network
作者簡介
中圖分類號:TM343;TP273
收稿日期2015-11-05改稿日期2016-01-17
國家自然科學基金(61174005)和國家自然科學青年基金(51407085)資助項目。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32