基于駕駛模擬的汽車ABS仿真研究
2016-04-20 10:41:19熊登熊堅陳啟帆
公路與汽運 2016年2期
關鍵詞:汽車
熊登,熊堅,陳啟帆
(昆明理工大學交通工程學院,云南昆明 650500)
?
基于駕駛模擬的汽車ABS仿真研究
熊登,熊堅,陳啟帆
(昆明理工大學交通工程學院,云南昆明 650500)
摘要:采用一種汽車防抱死制動系統(ABS)雙邏輯門限值控制策略,通過駕駛模擬器程序控制和駕駛員在環仿真試驗,比較分析程序控制和駕駛員控制對ABS算法的影響。試驗結果表明,在給定控制算法下,程序駕駛控制和駕駛員在環駕駛控制都能使車輪的滑移率控制在20%左右,但駕駛員控制下車輪滑移率的波動更大,其原因為該環境下駕駛員可根據自己的判斷實時調整操作,操作數據隨機性更強,更符合實際情況。
關鍵詞:汽車;防抱死制動系統(ABS);駕駛模擬器;雙邏輯門限值控制;程序控制仿真;駕駛員在環仿真
汽車防抱死制動系統(ABS)常用控制方法有模糊控制、PID(比例、積分、微分)控制、神經網絡控制、滑動模態結構控制和邏輯門限值控制等,其中邏輯門限值控制應用最普遍,其優點是在沒有具體系統的數學模型下就能對ABS系統進行有效的非線性控制。使用該控制方法時,只需利用汽車在制動過程中車輪角減速度門限值控制就能實現基本的防抱死制動循環,若再附加車輪滑移率門限值作為輔助門限則會產生更佳的控制效果。
在以往的仿真研究中,駕駛輸入都是采用程序控制的方法,該方法方便、簡單,通過仿真研究,基本能檢驗ABS的控制算法。但汽車的ABS最終是要安裝在實際車輛上,并且是在特殊環境下由人來操縱控制,這與傳統仿真研究的程序控制是有區別的。該文采用ABS雙邏輯門限值控制算法,通過駕駛模擬器,對汽車ABS在程序控制和駕駛員在環仿真控制下的該算法進行仿真試驗,分析兩種方法的差異及產生原因。
1 車輛模型的建立
為了方便ABS建模,選用雙輪三自由度車輛模型。該模型的特點在于忽略了側向力的變化,同時利用縱向魔術公式可準確描述單一工況下制動過程中輪胎的受力及運動狀況。
1.1 車輛動力學模型
車輛制動過程中的受力如圖1所示。
車輛運動方程為:

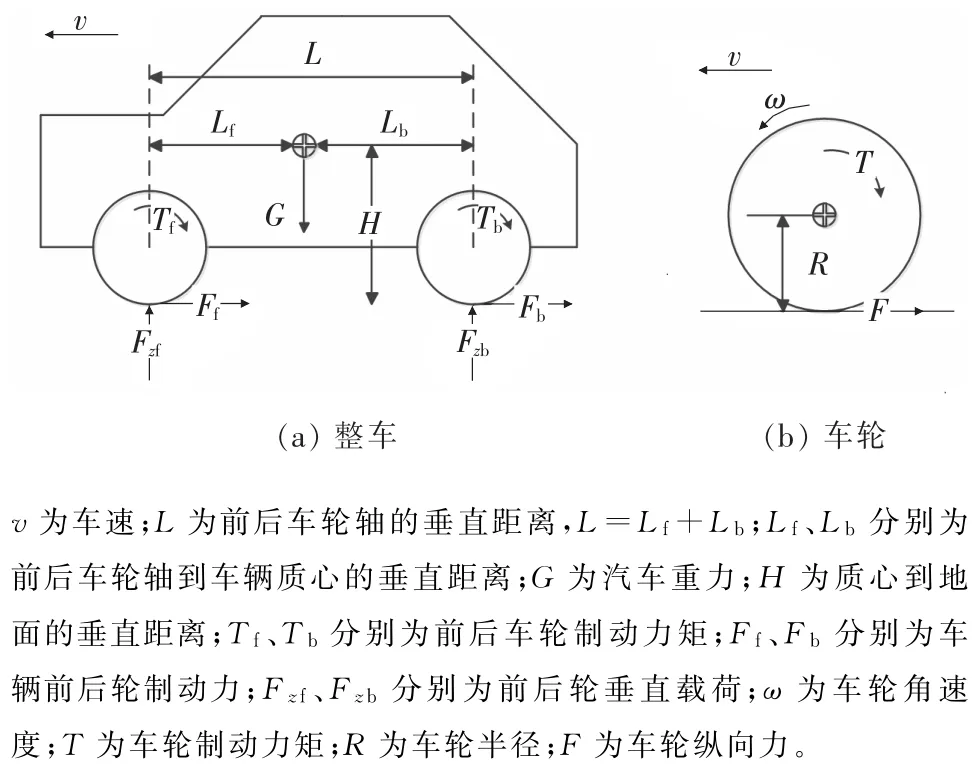
圖1 制動過程中車輛受力示意圖
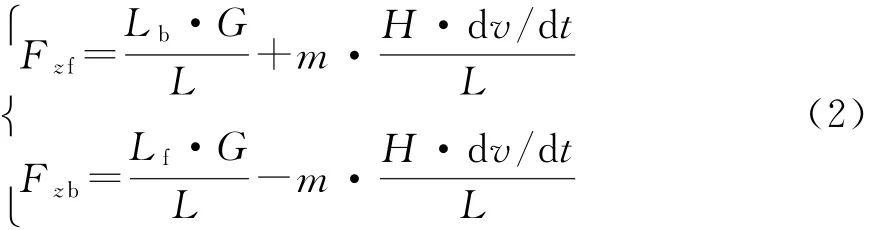
式中:m為汽車質量;t為制動時間。
垂直載荷為:
車輪的運動方程為:

式中:J為車輪轉動慣量;dω/d t為車輪減速度。
滑移率S的計算公式為:

1.2 輪胎模型
采用魔術公式輪胎模型,該模型只用一套公式即可完整地表達純工況下輪胎的力學特性。
根據魔術公式的一般表達式,在純制動單一工況下,輪胎縱向力F與縱向滑移率S和垂直載荷Fz的關系為:
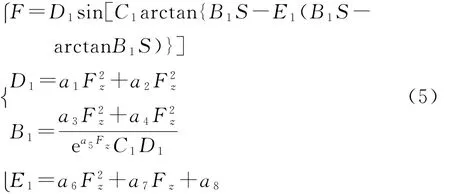
式中:D1為峰值因子;C1為曲線形狀因子;B1為剛度因子;E1為曲線曲率因子;a1、a2、a3、a4、a5、a6、a7、a8均為曲線擬合參數。
為了適應不同附著系數的路面,將附著系數通過曲線擬合的方式引入魔術公式,通過MATLAB進行擬合,得到a2與附著系數φ的關系為:

2 ABS雙邏輯門限值控制流程
ABS雙邏輯門限值控制算法中需參考的門限值只有2個,即車輪角減速度門限值a1和滑移率門限值S1,比傳統邏輯門控制算法的4個控制參數少,因而這種控制算法邏輯簡單,控制步驟較少,更適合于仿真分析。其邏輯關系如圖2所示。
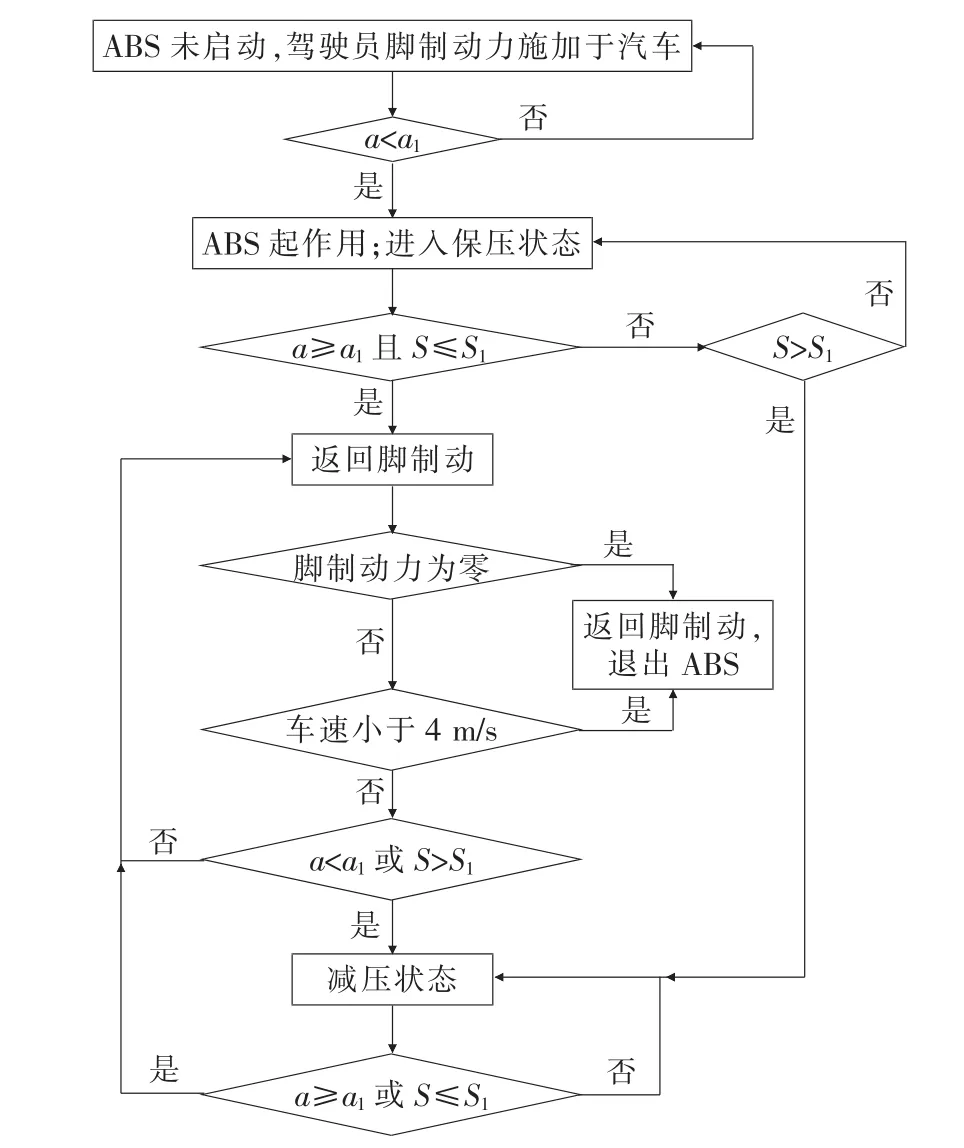
圖2 ABS雙邏輯門限值控制算法的控制邏輯
該算法的控制流程為:
第一次循環過程中,制動初期,ABS不工作,當檢測到車輪角減速度a<a1時,ABS開始工作,駕駛員制動不再起作用,系統進入保壓階段。在保壓階段進行兩次判斷,如果車輪角減速度a≥a1且滑移率S≤S1,則ABS不工作,系統進入第二次循環中的駕駛員制動狀態;如果不滿足前面的情況,但滑移率S>S1,則說明處于低附著系數路面,ABS系統進入第二次循環中的減壓狀態;如果兩種情況都不滿足,則維持保壓狀態,直到出現兩種情況中的一種,再進入ABS系統的第二次循環。
第二次循環過程中,如果以駕駛員制動作為循環的起始點,需先對制動力和車速進行判斷。如果腳制動力為零或車速小于4 m/s,則退出ABS,返回未進入ABS時的初始階段。若不滿足上面的情況,則維持駕駛員制動狀態,直到車輪角減速度a<a1或滑移率S>S1時,ABS系統進入減壓狀態。在減壓狀態過程中,當檢測到車輪角減速度a≥a1或滑移率S≤S1時,則返回駕駛員制動狀態,接著繼續循環,直到車輛停止。
3 駕駛模擬仿真試驗
駕駛模擬仿真試驗在小型模擬器上完成(如圖3所示)。先在MATLAB中建立式(1)~(6)的車輛模型和圖2所示邏輯控制模塊,其中車輛模型中的參數設定參考捷達車的各項參數,然后將所建ABS控制模塊生成C語言程序源代碼,最后將C語言程序代碼導入KMRTS車輛動力學模型中進行仿真試驗。

圖3 小型駕駛模擬器
駕駛模擬仿真試驗分為駕駛模擬器的程序控制仿真試驗和駕駛員在環ABS仿真試驗。駕駛模擬器程序控制仿真試驗則是在動力學模型中設置一定的程序信號(如制動踏板行程、制動開始時間、制動停止時間、方向盤轉角等)控制整個仿真過程,最后將各控制參數依次輸入駕駛模擬器的動力學模型中;駕駛員在環ABS仿真試驗則是通過駕駛員在模擬器上實際駕駛,采集操縱信號來進行相關參數的數據分析。
3.1 程序控制仿真試驗
為了通過程序控制仿真達到驗證汽車ABS有效性的目的,設定緊急制動避障場地(如圖4所示)。車輛以一定的初始速度從起始處出發,當距離障礙物30 m時,緊急制動并給方向盤一定的轉角來避開障礙物,根據前后輪的滑移率和車速變化情況及行駛狀態俯覽圖,分析車輛ABS的有效性。
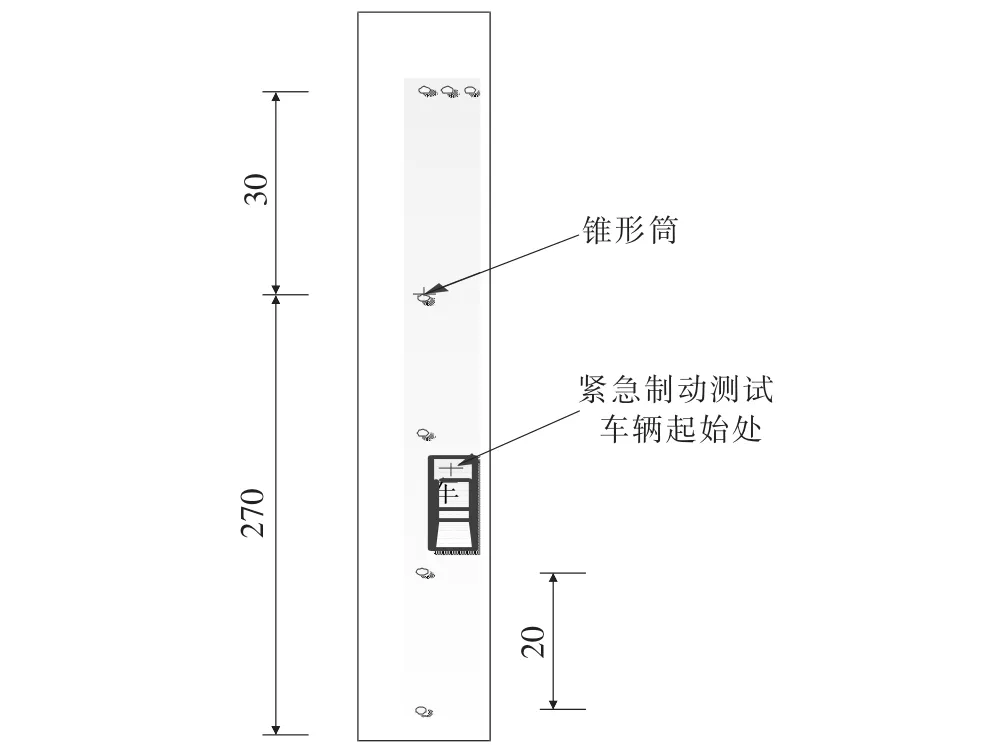
圖4 緊急制動避障試驗場景俯覽示意圖(單位:m)
程序控制仿真試驗在高附著系數(0.8)路面上進行。試驗時,初始車速為80 km/h,仿真步長為0.01 s。圖5為程序控制下的仿真曲線。
從圖5(a)可以看出:在ABS程序控制的情況下,車輛突然進行緊急制動,車輪沒有完全抱死,成功避開了障礙物,進入草地中,沒有發生甩尾現象,整個制動過程中車輛保持了良好的操縱穩定性。
從圖5(b)可以看出:車輪速度均勻波動下降,變化趨勢較好,沒有發生抱死現象。
從圖5(c)可以看出:左前輪、左后輪滑移率均穩定在0.2左右,前后車輪均未抱死,說明該控制策略有效,能滿足汽車ABS的控制需求。
3.2 駕駛員在環ABS仿真試驗
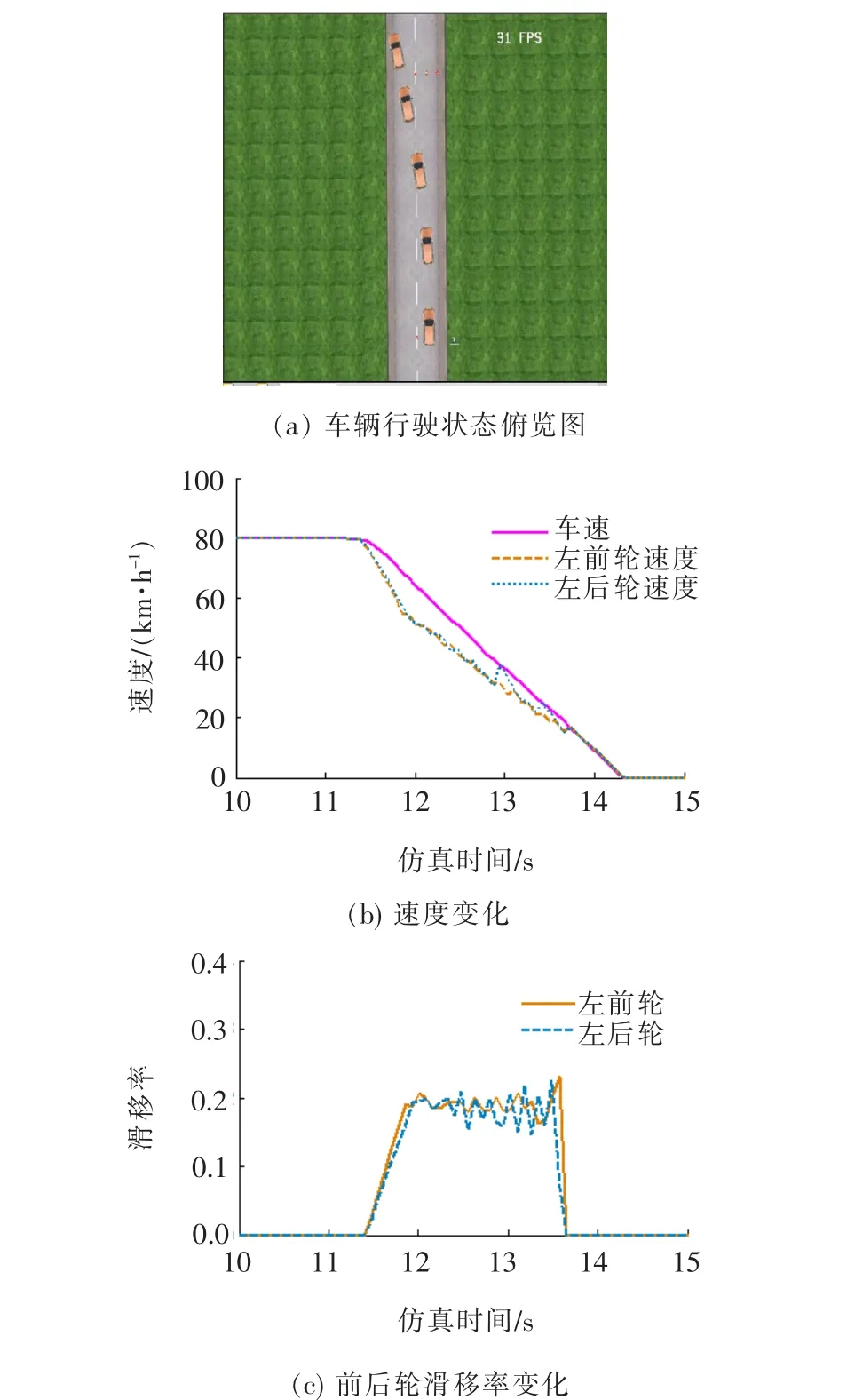
圖5 緊急制動避障過程中ABS程序控制仿真曲線

圖6 駕駛員在環仿真車輛動力學參數曲線
駕駛員在環仿真試驗所用試驗場景與程序控制仿真試驗場景相同,不同的是試驗過程由程序控制改為駕駛員實際操作,通過采集駕駛員的相關操縱信號進行數據分析。圖6為駕駛員操控在高附著系數路面進行仿真試驗所采集的部分車輛動力學參數。
從圖6可以看出:在駕駛員控制的情況下,在仿真時間為16 s時,車輪速度開始均勻波動下降,前后輪滑移率開始急劇上升,且在整個制動過程中兩車輪滑移率控制在0.2左右,車輪都沒有抱死,說明這套ABS控制系統在駕駛員實際操作時能滿足控制需要。
3.3 程序控制仿真與駕駛員在環仿真對比分析
程序控制仿真試驗與駕駛員在環仿真試驗在實際操作過程及仿真結果中存在一定的區別,下面對高附著系數路面上兩試驗的滑移率和操作行為參數進行對比分析。
兩個試驗在高附著系數路面下的滑移率變化分別如圖5(c)、圖6(b)所示。從中可以看出:無論是程序控制還是駕駛員操作,在整個制動過程中車輪滑移率均穩定在0.2左右,處于良好控制范圍內,說明采用的雙邏輯門限值控制策略能滿足汽車ABS的控制需求,在駕駛模擬器仿真中是有效的;但程序控制下滑移率的振動頻率和幅度較小,過于理想化,而駕駛員操控下得到的滑移率變化幅度更大,更符合實際制動過程。
圖7、圖8分別為程序控制和駕駛員控制下的操作行為參數曲線。
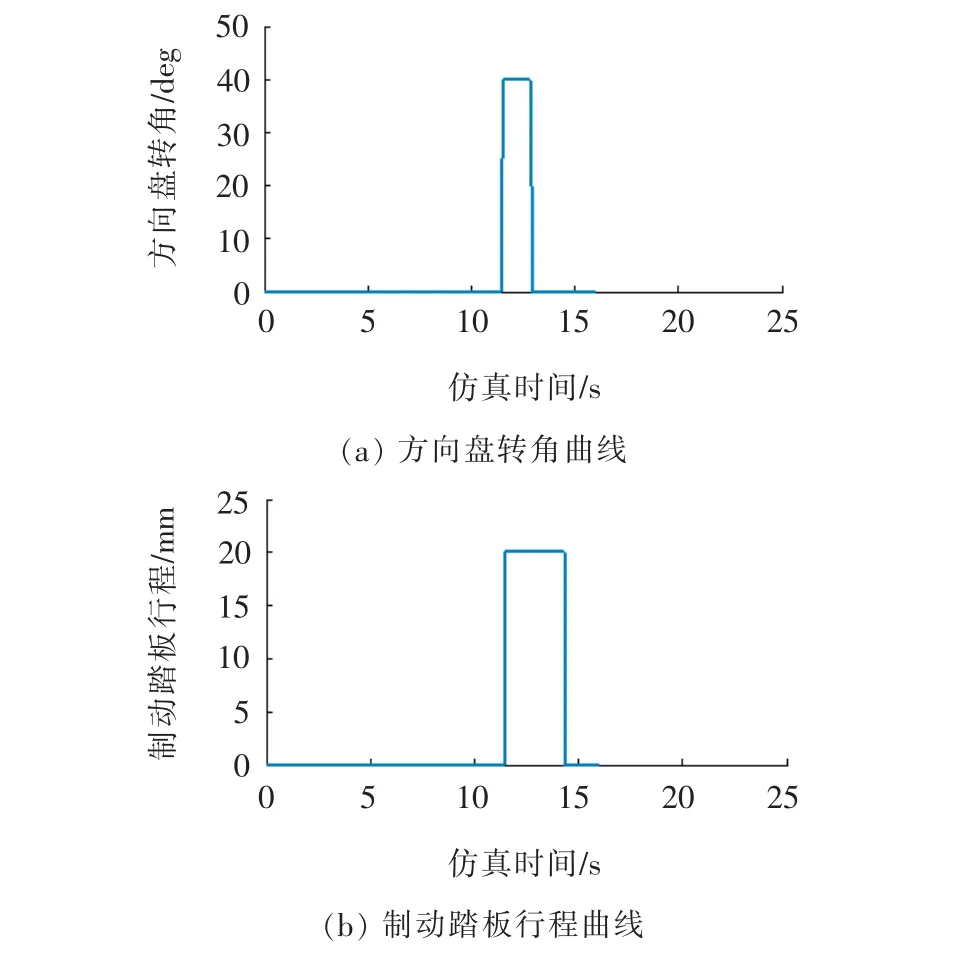
圖7 程序控制下的操作行為參數曲線
從圖7來看,在程序控制下,方向盤轉角與腳踏板行程都非常穩定,不存在抖動現象。從圖8來看,方向盤轉角比較穩定,偶爾會有小幅度的變化,在整個制動過程中,制動踏板行程變化也較平穩,屬于穩定踩死剎車之后松開剎車的制動過程。對比兩圖可以發現,在駕駛員控制下,駕駛員可根據自己的判斷實時調整操作,操作數據隨機性更強,更符合實際情況,更適合用來檢測ABS的控制效果。
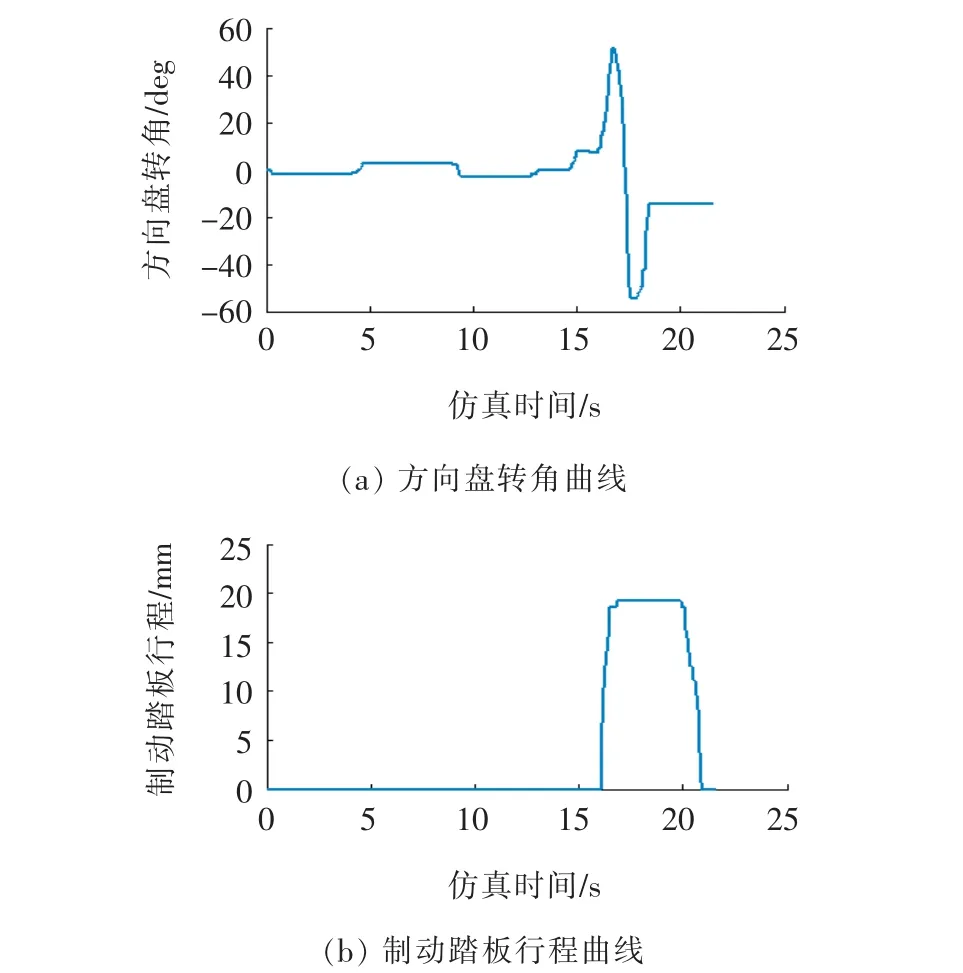
圖8 駕駛員控制下的操作行為參數曲線
4 結論
該文在傳統邏輯門限值控制策略的基礎上提出了一種雙邏輯門限值的汽車ABS控制策略,采用駕駛模擬器對該控制策略分別進行程序控制仿真試驗和駕駛員在環ABS仿真試驗,通過滑移率和操作行為參數對比兩種仿真試驗的區別。通過對試驗仿真結果的分析,主要得到以下結論:
(1)在汽車ABS雙邏輯門限值控制算法下,程序駕駛控制和駕駛員在環駕駛控制都能使車輪的滑移率控制在0.2左右,但在駕駛員控制下車輪滑移率的波動范圍更大,更符合實際的制動過程。
(2)駕駛員在環駕駛控制時,駕駛員可根據自身判斷實時調整操作,操作數據隨機性更強,更符合實際情況,更適合用來檢測汽車ABS的控制效果。
參考文獻:
[1]李韶華,黃宏偉,李燦.基于虛擬樣機技術的重型汽車ABS模糊控制研究[J].科技導報,2013,31(4).
[2]席本強,何毅,丘文森.汽車ABS的模糊自適應PID控制[J].遼寧工程技術大學學報,2014,33(11).
[3]劉鑫偉,谷正氣,楊易,等.基于模糊神經網絡的汽車輔助制動控制系統的研究[J].汽車工程,2010,32(12).
[4]潘輝,李禮夫.基于路面識別的汽車ABS滑模控制方法的研究[J].現代制造工程,2011(2).
[5]王偉達,丁能根,張為,等.ABS邏輯門限值自調整控制方法研究與試驗驗證[J].機械工程學報,2010,46(22).
[6]鄭太雄,馬付雷.汽車ABS邏輯門限值控制方法研究[J].重慶郵電大學學報,2011,23(4).
[7]鄭太雄,馬付雷.基于邏輯門限值的汽車ABS控制策略[J].交通運輸工程學報,2010,10(2).
[8]田晶晶,陽冬波,李梟.基于遺傳算法的魔術公式輪胎模型參數辨識方法研究[J].交通節能與環保,2014(4).
[9]Pacejka H B.Tyre and vehicle dynamics[M].Oxford: Butterworth-Heinemann,2006.
[10]梁春蘭,盛鵬程,劉衛澤.基于“魔術公式”輪胎模型的MATLAB仿真研究[J].邢臺職業技術學院學報,2013,30(1).
[11]陳啟帆.駕駛員在環汽車ABS仿真實驗研究[D].昆明:昆明理工大學,2014.
收稿日期:2015-12-09
中圖分類號:U463.52
文獻標志碼:A
文章編號:1671-2668(2016)02-0011-04
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50