基于最小二乘殘差的導航接收機自主完好性監測方法
2016-04-20 02:36:06李超朱陵鳳楊青楊勇
全球定位系統 2016年1期
李超,朱陵鳳,楊青,楊勇
(北京衛星導航中心,北京100094)
?
基于最小二乘殘差的導航接收機自主完好性監測方法
李超,朱陵鳳,楊青,楊勇
(北京衛星導航中心,北京100094)
摘要:隨著衛星導航系統在生命安全服務領域的廣泛應用,用戶對衛星導航接收機導航定位結果的可用性和可靠性要求越來越高。目前,基于用戶端的較為有效的方法就是利用接收機自主完好性監測來實現。本文對利用最小二乘殘差法實現衛星導航接收機自主完好性監測算法進行了研究,并分析了可視衛星數對完好性監測的影響。對北斗系統實測數據的處理也得到比較滿意的結果,驗證了該方法的正確性和可用性,可為北斗衛星導航實際應用提供參考。
關鍵詞:接收機自主完好性;故障檢測;故障隔離;最小二乘殘差法
0引言
接收機自主完好性監測(RAIM)技術是接收機軟件中的一種算法,它利用衛星的冗余觀測信息,對多個導航解進行一致性檢驗,可以針對單個衛星故障達到完好性監測的目的[1-3]。RAIM技術包括故障檢測(FD)和故障隔離(FI)兩項功能,當接收機能夠同時觀測5顆導航衛星時,可以進行故障檢測,利用RAIM可迅速判定有無衛星信號異常;當有6顆可見衛星時,可以進行故障隔離,利用RAIM技術就可以判斷出哪一顆衛星信號異常,從而提高了導航系統的完好性監測的能力。該技術不依靠外加監測設備,而僅由用戶接收機本身提取系統的完好性信息,因此不需要配備外部支持設備,花費較低,且容易實現。目前,比較成熟的接收機自主完好性監測算法有最小二乘殘差法、奇偶空間矢量法、偽距法等。這里主要介紹基于最小二乘殘差的接收機自主完好性監測算法,最后根據實測數據分析RAIM算法的靈敏度及其對定位結果的影響[1-3]。
1基于最小二乘殘差的監測方法
利用最小二乘原理進行定位解算的同時,可對最小二乘殘差進行粗差探測。根據這一原理,介紹基于殘差平方和的開方檢驗進行系統級的故障檢測和基于殘差元素的高斯檢驗進行單元素的故障隔離方法。
1.1基本模型
基于偽距測量的導航接收機觀測方程可以表示如下:
ρ=R+c×Δt
c×Δt+ε,
(1)
式中: ρ為偽距觀測量; R為接收機到衛星的真實距離;Δt為接收機鐘差;(X,Y,Z)為待求用戶位置坐標; (Xs,Ys,Zs)為已知衛星位置坐標; ε為觀測噪聲; c為光速。
當觀測衛星數不少于4時,通過解方程組得到用戶位置坐標。在進行位置解算時首先將式(1)進行線性化轉換。則任意時刻t第j顆衛星的偽距觀測方程線性化為

c·δt(t)+εi,
(2)
當某時刻同時觀測到n(n不小于4)顆衛星,由式(2)則線性化方程組為
(3)
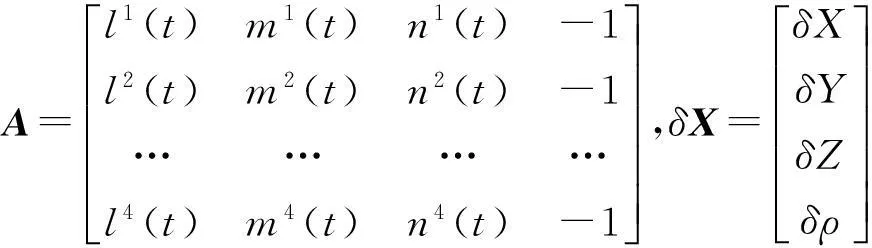
P為觀測值權陣,可得用戶狀態的最小二乘解為
(4)
則偽距殘差向量可表示為
=(I-A(ATPA)-1ATP)ε,
(5)
偽距殘差向量的協因數陣可表示為
Qv=P-1-A(ATPA)-1AT,
(6)
驗后單位權中誤差可表示
(7)
1.2基于殘差的故障檢測
故障檢測是接收機自主完好性監測的首要功能。當用戶視界內存在偽距超限的導航衛星時,可能造成用戶水平定位徑向誤差超限。故障檢測主要依據統計原理對觀測數據進行監測,判斷是否存在故障衛星,以及時發現導航中的異常情況,采取應對措施避免災難發生[4-6]。


表1 故障檢測門限值表
由表1可以看出,在一定的誤警概率條件下,當可視衛星個數越多,檢測門限值越小,對故障靈敏度越高,更加有利于故障檢測。
1.3基于殘差的故障隔離
在生命安全服務領域,當衛星導航系統用作唯一導航手段時,RAIM不僅要能夠檢測故障,還需識別故障并排除故障星,以保證繼續安全使用[7-8]。

(8)
n顆可視衛星可得到n個檢驗統計量,給定總體誤警概率為PFA,則每個統計量的誤警概率為PFA/n.這樣,有下面的概率等式成立。

(9)
通過式(9)可計算得到檢測限值Td.對于每個檢驗統計量di,分別與Td比較,若di>Td,則表明第i顆衛星有故障,應將之排除,不再參與解算。
2算例分析
利用參考站監測接收機數據,驗證衛星觀測值發生突變和緩變情況時RAIM性能。取11 000個連續觀測歷元,采樣間隔1s,監測接收機采樣期間可視衛星數與PDOP值變化,如圖1,圖2所示。
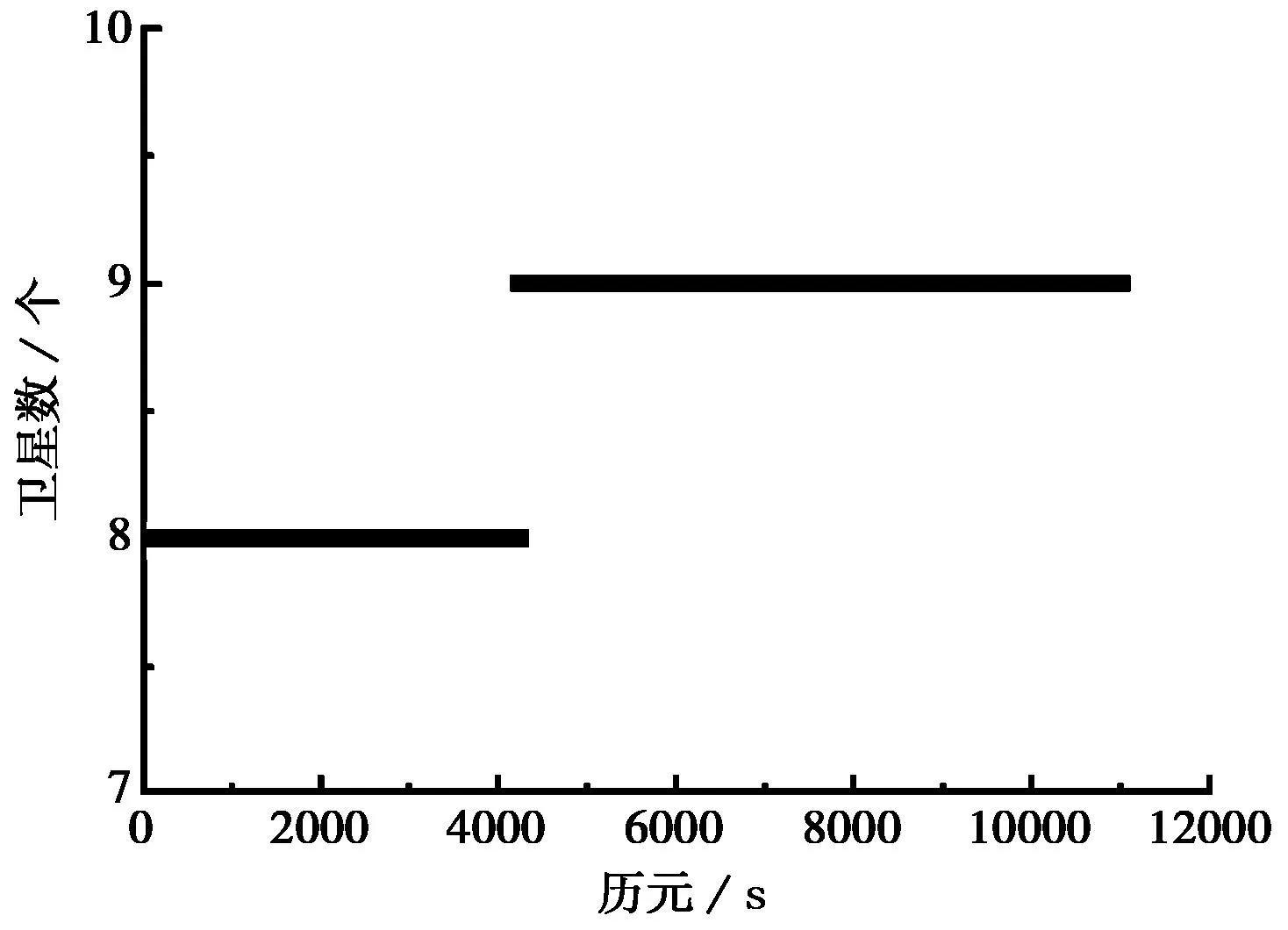
圖1 接收機采樣期間可視衛星數變化
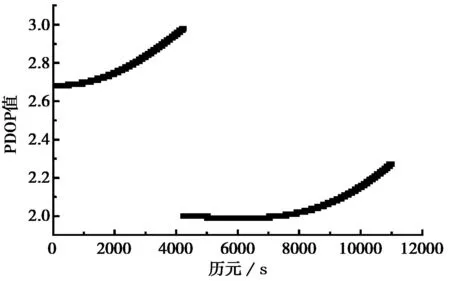
圖2 接收機采樣期間PDOP值變化
1) 觀測值突變故障時RAIM性能驗證。分別在4 000、6 000、8 000、10 000歷元的觀測量加上40m、50m、60m、80m粗差,比較利用最小二乘和RAIM解算用戶三維位置誤差變化,如圖3、圖4所示。
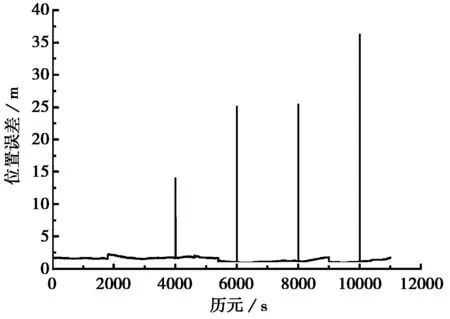
圖3 最小二乘法解算用戶位置誤差變化
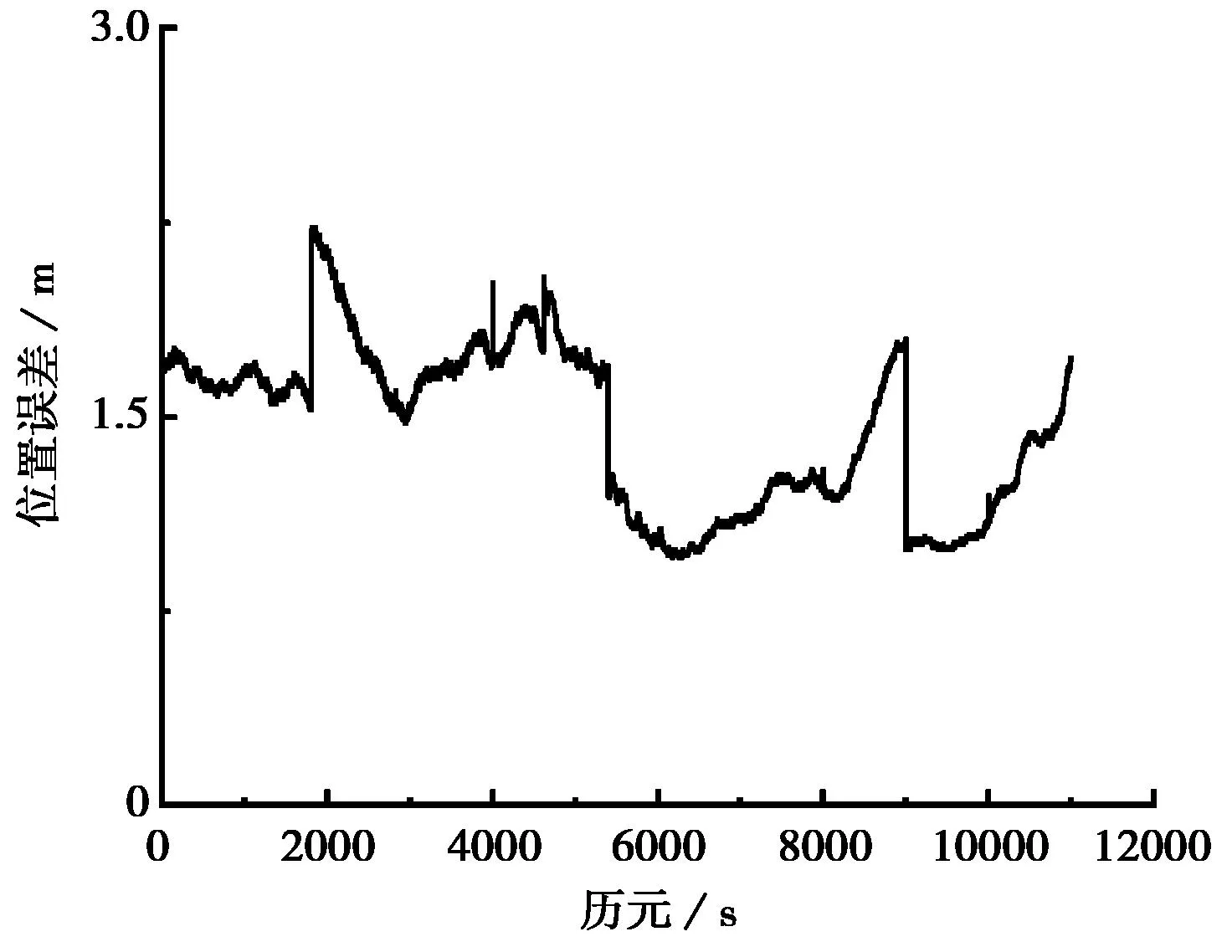
圖4 RAIM解算用戶位置誤差變化
圖5 不含粗差時最小二乘法解算用戶位置誤差變化
由圖3、圖4看出,利用最小二乘解算的用戶位置在加入粗差的歷元發生跳越性變化,誤差值由原來最大不足2m變到最大達37m左右;比較圖4和5,用RAIM解算的用戶位置誤差和不含粗差時最小二乘法解算用戶位置誤差基本一致。在足夠可視衛星條件下,RAIM算法能夠有效剔除單顆故障衛星,保證用戶定位精度。
2) 觀測值緩變故障時RAIM性能驗證。選取一個歷元的觀測數據作為故障仿真起始態,持續3000s,在第500s后,對1號衛星(GEO01)觀測量每秒增加0.02m粗差,模擬故障漸變對定位精度的影響和在一定測距誤差、誤警率和漏警率下RAIM的靈敏度。以正常條件誤差影響下的觀測值為參考,圖6示出了含粗差的觀測量和參考觀測量的差值隨歷元的變化,圖7示出了觀測值在不斷加入粗差時,解算出的用戶位置和已知位置差的變化。
由圖6、7看出,在第500個歷元后,隨著GE001觀測量不斷加入粗差,用戶的位置差,開始有短暫的減小然后隨著觀測值差的增加而變大;在第1 515歷元后GE001觀測量被剔除,這時所得到的用戶位置差又回到正常狀態。

圖6 GE001衛星觀測值差值的變化
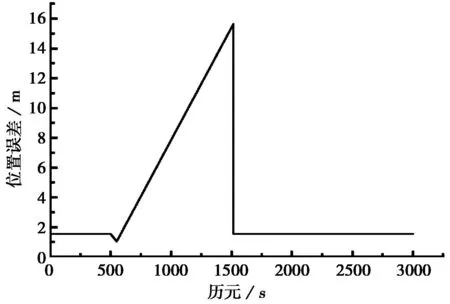
圖7 用戶位置誤差變化
3結束語
通過對RAIM算法原理推導和算例結果的分析可以得到如下結論:
1) 在定誤警率和漏警率條件下,當可視衛星個數越多,檢測門限值越小,對檢測故障靈敏度越高,有利于故障檢測。
2)RAIM算法可以很好解決衛星導航系統用
戶端定位完好性問題,對于故障衛星,能利用多余觀測量進行有效檢測,及時向用戶告警,并能正確剔除單顆故障星,提高單歷元用戶定位精度。
參考文獻
[1] 許其鳳.GPS衛星導航與精密定位[M]. 北京:解放軍出版社,1994.
[2] 譚樹森. 衛星導航定位工程[M].2版.北京:國防工業出版社,2010.
[3] 謝鋼.GPS原理與接收機設計[M]. 北京:電子工業出版社,2009.
[4]HEWITSONS,LEEHK,WANGJ.LocalizabilityanalysisforGPS/Galileoreceiverautonomousintegritymonitoring[J].TheJournalofNavigation,2004,57(2): 245-259.
[5] 王爾申,張淑芳,胡青.GNSS接收機自主完好性監測算法研究[J].通信技術,2010,43(1):213-216.
[6] 胡瑩瑩,趙艷杰,王大鳴.關于GPS單星定時提高定時精度的研究[J].通信技術,2009,42(1):16-18.
[7] 梁書忠,唐斌,李騰.衛星導航模擬測試系統原來與實現[J].全球定位系統,2015,40(1):52-56.
[8] 王丹,馬航帥,孫曉敏,等.衛星自主完好性監視算法研究[J].民用飛機設計與研究,2013(S2):4-9.
李超(1981-),男,碩士,工程師,主要從事衛星導航用戶終端算法及終端測試技術研究。
朱陵鳳(1983-),女,碩士,工程師,主要從事衛星導航系統時間同步及定軌技術研究。
楊青(1979-),女,碩士,工程師,主要從事衛星導航用戶終端測試與管理技術研究。
楊勇(1984-),男,博士,工程師,主要從事衛星導航用戶終端測試與標定技術研究。
Research on Receiver Autonomous Integrity Monitoring by Least Squares Residuals
LI Chao, ZHU Lingfeng, YANG Qing, YANG Yong
(BeijingSatelliteNavigationCenter,Beijing100094,China)
Abstract:With the wide application of the satellite navigation system in the field of life safety service, users pay more attention to the reliability and availability of the navigation results. Receiver autonomous integrity monitoring(RAIM) can achieve better performance in the position domain than others at present. Based on real data the proposed RAIM algorithm is tested. Experimental results demonstrate the RAIM algorithm can effectively detect and isolate a false satellite. This can provide important reference for application of BDS.
Keywords:Receiver autonomous integrity monitoring; fault detection; fault isolation; Least Square Methods and Remnant Error
作者簡介
中圖分類號:P228.4
文獻標志碼:A
文章編號:1008-9268(2016)01-0069-04
收稿日期:2015-09-10
doi:10.13442/j.gnss.1008-9268.2016.01.013
聯系人: 李超 E-mail: lichaochxy@163.com