磁流變減振器的建模與半主動懸架振動控制的研究*
2016-04-17 06:11:54潘公宇侯觀遠青
汽車工程 2016年6期
關鍵詞:模型
潘公宇,侯觀遠青,楊 海
(江蘇大學汽車與交通工程學院,鎮江 212013)
2016115
磁流變減振器的建模與半主動懸架振動控制的研究*
潘公宇,侯觀遠青,楊 海
(江蘇大學汽車與交通工程學院,鎮江 212013)
根據磁流變減振器阻尼特性的試驗結果,建立了一種將參數化與非參數化建模方法相結合的阻尼力模型。該模型用自適應神經模糊推理系統模擬阻尼力的滯回特性,數值擬合阻尼力隨電壓和速度而變化的關系。驗證結果表明,該模型能很好地逼近試驗結果并反映其滯回特性。在此基礎上,推導了在理想控制力下所建阻尼力模型的控制電壓計算方法,并將該方法應用于汽車的磁流變半主動懸架控制的仿真。結果顯示磁流變半主動懸架能較好地提高車輛的平順性,提出的控制電壓計算方法可行有效。
磁流變減振器;建模;半主動懸架;振動控制
前言
磁流變減振器(MRD)是基于磁流變液在磁場作用下流動阻尼可控特性的一種減振裝置,具有響應迅速、可調范圍大和可控性強等優點。由于磁流變減振器具有強非線性特性,為了充分利用其減振功能,需要能夠實時準確地獲得理想的控制電壓或電流。目前用于磁流變減振器的控制方法主要有Skyhook控制[1]、滑模控制[2]和自適應模糊控制方法等[3-5],其中Skyhook控制策略只能實現開關控制且會產生自激現象;滑模控制要測量減振器的力;自適應模糊控制計算量大。在控制過程中使用的參數化模型有些擬合效果較差[6-7],有些非線性較強難以處理[8];非參數化模型普遍計算量大[9-11]。因此在實際應用中難以獲得滿意的效果。
本文中在磁流變減振器阻尼特性試驗基礎上,結合參數化和非參數建模各自的優點提出了一種將參數化與非參數化建模方法相結合的阻尼力模型。用自適應神經模糊推理系統逼近歸一化之后的試驗數據來描述阻尼力關于活塞桿位移及速度的非線性滯回關系;根據不同工況下的試驗結果,擬合出阻尼力關于輸入電壓和活塞桿速度的關系公式。以該模型為基礎研究了實時控制電壓的計算方法,并將其應用于2自由度磁流變半主動懸架進行仿真,研究結果表明,本文中所提出的模型是有效的,基于該模型的實時控制電壓計算方法是可行的。
1 磁流變減振器阻尼特性建模
1.1 磁流變減振器阻尼特性試驗
試驗對象為Lord公司的RD-1005型磁流變液減振器。該減振器的工作模式為流動方式,由磁流變液、上下儲液腔、活塞組件、勵磁線圈、內置補償氣室和導線組成,最大輸入電壓12V。通過圖1所示的激振臺驅動減振器缸筒相對于活塞桿做正弦簡諧運動,設置激振頻率為4Hz,振幅分別為4,10和15mm,輸入電壓0~7V,間隔1V[11]。試驗結果如圖2和圖3所示,圖2中曲線由內到外為電壓增大的方向。

圖1 磁流變液減振器實際測試圖
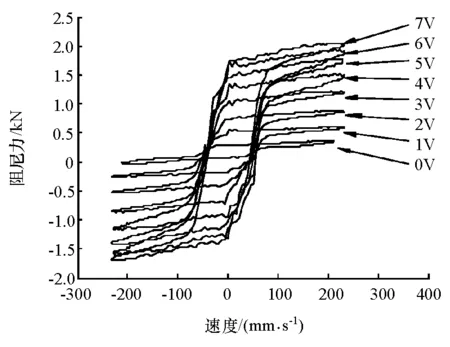
圖2 振幅10mm、頻率4Hz時阻尼力-速度曲線

圖3 電壓2V、頻率4Hz時阻尼力-速度曲線
由圖2可見,阻尼力隨電壓的增大而顯著增大。這是由于電壓增大后線圈產生的磁場強度也變大,液體的剪切應力也因此變大。由圖3可見,當輸入電壓一定時,高速部分的阻尼力呈近似線性變化,只與速度相關,幾乎不受振幅變化的影響。阻尼特性曲線在復原行程和壓縮行程產生的阻尼力并不關于零點對稱,而是整體往上偏移了一定距離,該偏置力是因為減振器內設置有補償氣室造成的。此外,將試驗數據去除偏置力影響后進行歸一化處理,發現其阻尼特性曲線具有很高的重合度,如圖4所示。

圖4 歸一化后的阻尼力-速度曲線
1.2 阻尼力模型結構
根據試驗結果分析,本文中提出了阻尼力模型結構,如圖5所示。該模型主要由兩個部分組成。

圖5 磁流變減振器阻尼力模型結構
(1) 非線性滯回特性描述部分 用自適應神經模糊推理系統逼近歸一化之后的試驗數據來描述阻尼力的非線性滯回特性。
(2) 最大阻尼力參數擬合部分 根據不同工況下得到的試驗數據的最大阻尼力,擬合出減振器最大阻尼力與輸入電壓和活塞桿最大速度的關系式。此處最大阻尼力是指對應試驗工況下阻尼力去除偏置力影響后的最大值。
目前,我國大多數的鄉村旅游建設是由政府主導,尤其是在各種扶持政策文件下,得到當地鄉鎮政府的極大重視,為鄉村旅游發展提供了基礎保證,但僅靠政府力量并不足夠,需要整合行業協會、企業、志愿者、村民等共同形成管理機構,統一規范管理。如借鑒“法蘭西最美麗村莊”協會的經營模式,建立嚴謹的組織結構和管理機制,讓本村的干部、提供資助的社團或企業以及部分有經驗的并有一定學歷的服務行業從業者組成執行代表團,共同參與建設,更多地賦權給對本地區概況極其了解且有一定學歷背景的本地村民及有權威性的協會部門或企業,共同參與標準的制訂與考核,平衡各相關者的利益,達到利益均衡才是可持續發展的根本動力。
將得到的阻尼力非線性滯回特性逼近結果分別按照最大阻尼力和對應的振幅和最大速度反歸一化處理,然后加上阻尼偏置力就可模擬任意輸入激勵下磁流變液減振器的阻尼力動態特性。
1.3 非線性滯回特性描述
自適應神經模糊推理系統(ANFIS)是一種借用神經網絡理論進行模糊系統的參數自整定,充分利用兩種理論各自優勢的一種自適應網絡[12]。ANFIS已被證明能以任意精度逼近連續非線性函數,并用模糊邏輯系統來表達非線性函數。ANFIS的參數學習多采用BP算法或BP算法與最小二乘法結合的混合算法。
將ANFIS設計為雙輸入單輸出系統,以歸一化后的位移和速度為系統的輸入變量,歸一化后的阻尼力為系統的輸出變量,隸屬度函數均采用三角形隸屬度函數,采用輸入激勵振幅10mm、頻率4Hz、輸入電壓為1~7V時試驗數據來進行ANFIS訓練。
圖6為經過ANFIS訓練后的模糊規則曲面圖。

圖6 訓練后自適應神經模糊系統的控制規則曲面
1.4 最大阻尼力參數擬合
準確地計算減振器在任意激勵條件下的最大阻尼力是建立該阻尼力模型重要的一步。參考Bingham力學模型將磁流變減振器的阻尼力看作是由與磁流變液剪切應力相關的庫侖阻尼力和與活塞運行速度相關的黏滯阻尼力兩部分組成。圖7(a)為最大阻尼力與電壓的關系,電壓越大最大阻尼力隨速度的變化幅度也越大,這在阻尼力與速度的關系圖上表現為高速部分的斜率隨電壓的增大而變大;屈服后部分的斜率與電壓關系如圖7(b)所示;相應的庫侖阻尼力與電壓的關系如圖7(c)所示。
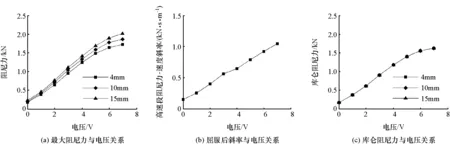
圖7 最大阻尼力參數擬合關系曲線
根據以上分析結果,建立最大阻尼力表達式:
Fm= -5.2u3+43.7u2+161.0u+167.5+
(1)
(2)

1.5 模型驗證
當輸入激勵振幅為15mm、頻率為4Hz、輸入電壓為0~7V時的模型驗證結果如圖8和圖9所示。由圖可見:模型仿真結果能夠很好地反映阻尼力的動態特性,雖然有一定誤差,特別在速度為0附近的誤差要大一些,這些誤差一是由于減振器補償氣囊的壓力波動和外部擾動而造成的,二是使用試驗數據進行自適應神經模糊系統訓練也會將試驗誤差傳遞至阻尼力模型,但是整體誤差控制在較小的范圍內。
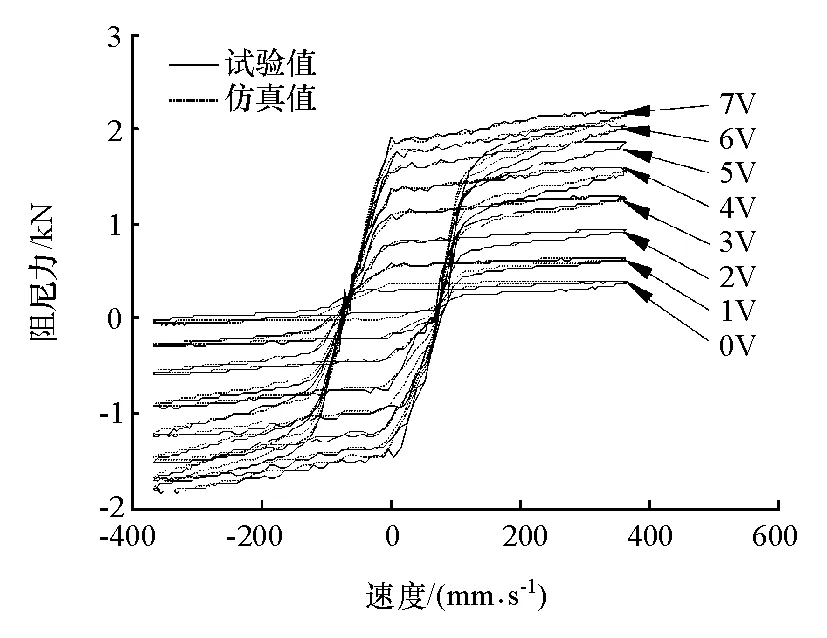
圖8 振幅15mm、頻率4Hz時阻尼力-速度曲線
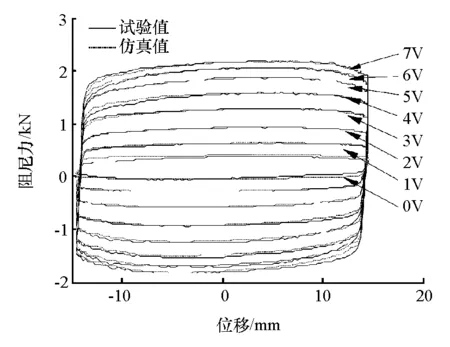
圖9 振幅15mm、頻率4Hz時阻尼力-位移曲線
驗證結果表明,該磁流變液減振器阻尼特性的建模方法是可行的。相比于現有模型,該模型可以避免建模過程出現大量需識別的參數,且不需要大量的試驗數據用于訓練,大大減少了建模的工作量。由于采用減振器的運動狀態作為模型輸入,故控制設計更方便,以半主動控制方式調節磁流變液減振器的阻尼力也更容易,從而可更好地發揮磁流變液減振器的減振功能。
2 阻尼控制電壓計算方法
在控制系統中使用所建立的阻尼力模型時,將減振器運行時每一時刻的狀態看作是由對應的正弦激勵產生的,然后確定該時刻狀態參數在對應的正弦激勵中的位置,再由所需的阻尼力和位置參數計算出在該正弦激勵下減振器應該產生的最大阻尼力,最后將最大阻尼力和最大速度代入式(1)求出控制電壓。
根據測得的減振器實時運行狀態參數(位移、速度和加速度)確定該時刻對應的正弦激勵的最大振幅和最大速度,其中最大速度由式(2)計算,最大振幅為
(3)
將測得的位移和速度按最大振幅和最大速度歸一化為
(4)
(5)

(6)
將計算得到的該時刻對應正弦激勵的最大速度和所需最大阻尼力代入式(1)求出控制電壓。
3 磁流變半主動懸架控制仿真
2自由度汽車懸架模型包含簧載質量垂向加速度、懸架動撓度和輪胎動載荷這些表征汽車平順性的主要參數,因此廣泛應用于懸架控制策略的研究。將基于所建模型的磁流變減振器控制電壓計算方法應用于汽車的磁流變半主動懸架控制系統,通過模糊控制方法來仿真分析懸架的控制效果,驗證控制電壓計算方法的可行性。
2自由度磁流變半主動懸架的振動方程為
(7)
式中:ms=350kg為簧載質量;mu=41kg為非簧載質量;c=290N·s/m為懸架的機械阻尼;ks=19.5kN/m為懸架的剛度;ku=192kN/m為輪胎的剛度;FMR為磁流變減振器可控阻尼力;q為隨機路面輸入。
模糊控制器設計為雙輸入單輸出系統,以簧載質量速度和簧載質量與非簧載質量的相對速度作為模糊控制器輸入,分別記作v和vr;以理想的懸架控制力作為輸出變量,記作u。輸入變量采用鐘形隸屬度函數,設置5個語言變量;輸出變量采用三角形隸屬度函數,設置7個語言變量;模糊控制規則見表1。模糊邏輯推理方式選擇Mamdani方式,解模糊方法采用質心法。
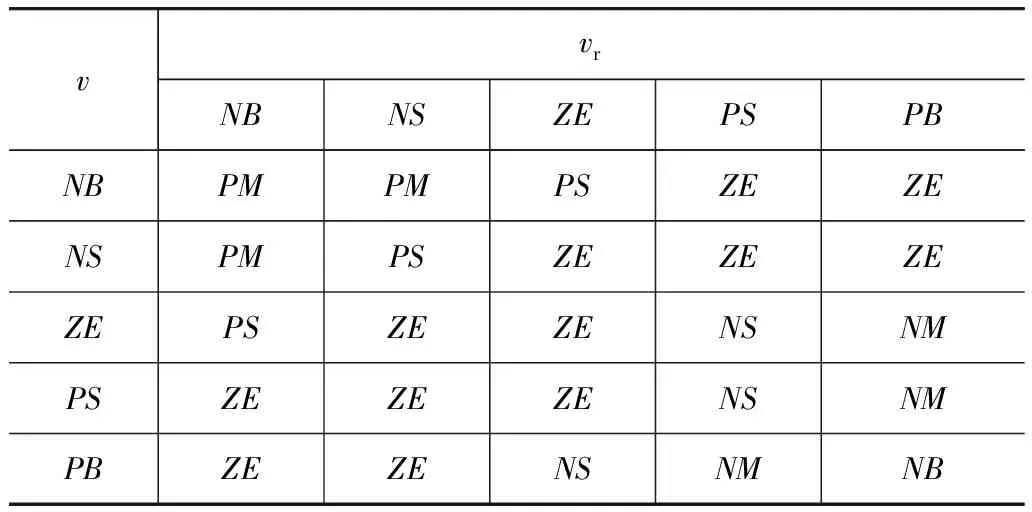
表1 半主動懸架模糊控制規則表
在Matlab/Simulink中建立2自由度磁流變半主動懸架的仿真程序,系統框圖如圖10所示。將模糊控制器得到的理想控制力導入控制電壓計算模塊,得到對應的控制電壓,然后通過磁流變減振器輸出可控的阻尼力。假定車輛以72km/h直線行駛在B級路面上進行仿真,得到在減振器可控阻尼力作用下懸架各性能評價指標的功率譜密度,如圖11~圖13所示。減振器實際阻尼力與理想控制力對比如圖14所示。

圖10 磁流變半主動懸架仿真程序系統框圖
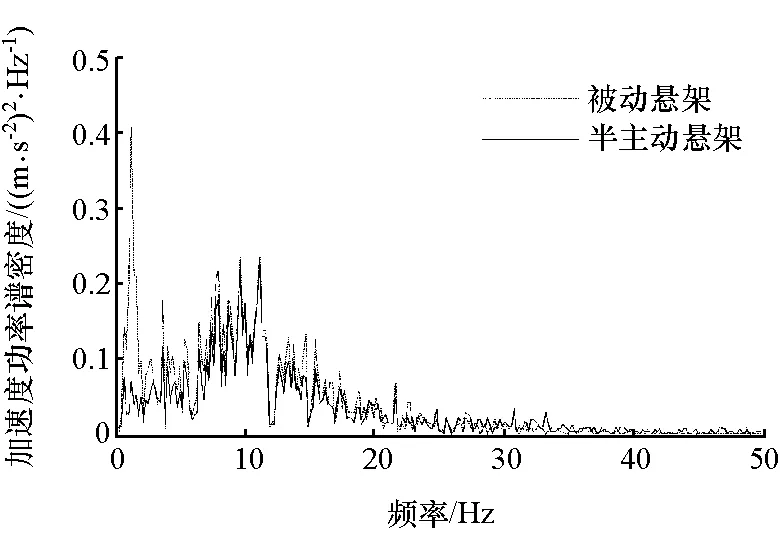
圖11 簧載質量加速度功率譜密度

圖12 懸架動撓度功率譜密度

圖13 輪胎動載荷功率譜密度

圖14 磁流變半主動懸架控制力
懸架性能評價指標的均方根值如表2所示。仿真結果表明,模糊控制的磁流變半主動懸架具有良好的減振性能,特別是在低頻階段;磁流變液減振器的輸出阻尼力能夠很好地跟隨理想的控制力,說明本文中控制電壓計算方法是有效的,能夠準確地計算出理想阻尼力對應狀態下的控制電壓。然而在控制力較小時減振器阻尼力與理想控制力間存在誤差,這是由于所需的理想控制力小于對應狀態下減振器能夠輸出的最小阻尼力而造成的,整體來看該誤差對控制效果影響很小。后續的研究將進行電壓實時控制的臺架試驗與驗證。
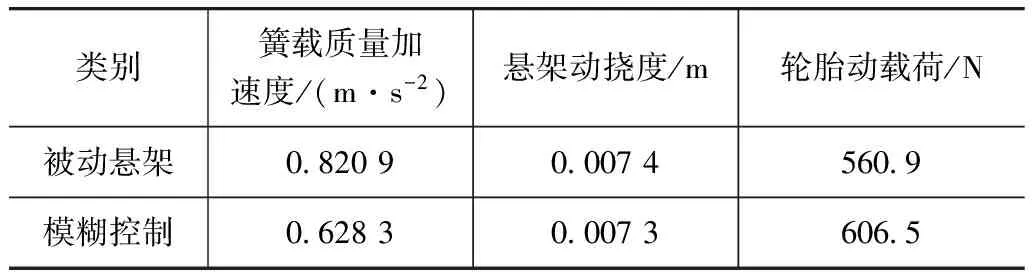
表2 懸架性能評價指標均方根值
4 結論
根據磁流變減振器阻尼特性的試驗和分析結果,提出了一種將參數化建模與非參數化建模方法相結合的建模方法,驗證結果表明,該方法能很好地模擬磁流變減振器的阻尼特性,且該模型的輸入是減振器運動狀態參數和電壓,因此方便用于實時控制。研究了基于該模型的控制電壓計算方法,并將其應用于汽車磁流變半主動懸架的控制仿真,結果表明該控制電壓計算方法是有效的,磁流變減振器具有良好的減振性能。
[1] 潘公宇.磁流體阻尼可調減振器[J].機械工程學報,2002,38(7):148-152.
[2] YOKOYAMA M, HEDRICK J K, TOYAMA S. A Model Following Sliding Mode Controller for Semi-active Suspension Systems with MR Dampers[C]. Proceedings of the American Control Conference, Arlington, Virginia,2001:2652-2657.
[3] 李以農,鄭玲.基于磁流變減振器的汽車半主動懸架非線性控制方法[J].機械工程學報,2005,41(5):31-37.
[4] 郭大蕾,胡海巖.基于磁流變阻尼器的車輛懸架半主動控制研究——間接自適應控制與實驗[J].振動工程學報,2002,15(3):285-289.
[5] 李艷陽,李以農,鄭玲,等.基于Takagi-Sugeno模型的磁流變半主動懸架控制[J].系統仿真學報,2013,5(25):1065-1070.
[6] STANWAY R, SPOSTON J L, STEVENS N G. Non-linear Modeling of an Electro-rheological Vibration Damper[J]. Journal of Electrostatics,1987(20):167-184.
[7] 王皖君,應亮,王恩榮.可控磁流變阻尼器滯環模型的比較[J].機械工程學報,2009,45(9):100-108.
[8] SPENCER B F, DYKE S J, SAIN M K, et al. Phenomenological Model for Magnetorheological Dampers[J]. Journal of Engineering Mechanics,1997,123(3):230-238.
[9] SCHULER K C, ROSCHKE P N. Neuro-fuzzy Modeling of a Magnetorheological Damper Using ANFIS[C]. Proceeding of 9th IEEE international Conference on Fuzzy Systems. San Antonio, Texas,2000:122-127.
[10] TRUONG D Q, AHN K K. Identification and Application of Black-box Model for a Self-sensing Damping System Using a Magneto Rheological Fluid Damper[J]. Sensors and Actuators A,2010(161):305-321.
[11] 王戡,鄭玲,劉非.基于廣義回歸神經網絡的磁流變減振器模型辨識[J].汽車工程,2013,35(7):619-634.
[12] 楊海.磁流變液減振器建模及磁流變半主動懸架控制研究[D].鎮江:江蘇大學,2014.
[13] 張澤旭.神經網絡控制與Matlab仿真[M].哈爾濱:哈爾濱工業大學出版社,2011.
A Study on the Modeling of Magneto-rheological Damper and theVibration Control of Semi-active Suspension
Pan Gongyu, Houguan Yuanqing & Yang Hai
SchoolofAutomobile&TrafficEngineering,JiangsuUniversity,Zhenjiang212013
A novel damping force model combining parametric model and non-parametric model is proposed based on the test results of magneto-rheological (MR) damping characteristics. The model uses an adaptive neural-fuzzy inference system to simulate the hysteresis characteristics of damping and conducts the numerical fitting on the relationships between damping versus voltage and speed. The results of verification show that the model can well approximate test results and reflect its hysteresis characteristics. On this basis, the calculation method of control voltage in damping model is derived and applied to the simulation on the MR semi-active suspension control of vehicle. The results demonstrate that MR semi-active suspension can better enhance the ride comfort of vehicle and the calculation method proposed of control voltage is feasible and effective.
magneto-rheological damper; modeling; semi-active suspension; vibration control
*國家自然科學基金(51375212)、江蘇省汽車工程重點實驗室開放基金(QC201304)和江蘇省動力機械清潔能源與應用重點實驗室開放基金(QK13003)資助。
原稿收到日期為2014年12月24日,修改稿收到日期為2015年7月13日。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
