基于最小二乘支持向量機(jī)的并聯(lián)混合動(dòng)力汽車發(fā)動(dòng)機(jī)轉(zhuǎn)矩在線估計(jì)*
2016-04-11 08:48:57徐益強(qiáng)
汽車工程 2016年10期
田 翔,何 仁,徐益強(qiáng)
(江蘇大學(xué)汽車與交通工程學(xué)院,鎮(zhèn)江 212013)
2016185
基于最小二乘支持向量機(jī)的并聯(lián)混合動(dòng)力汽車發(fā)動(dòng)機(jī)轉(zhuǎn)矩在線估計(jì)*
田 翔,何 仁,徐益強(qiáng)
(江蘇大學(xué)汽車與交通工程學(xué)院,鎮(zhèn)江 212013)
為提高并聯(lián)混合動(dòng)力汽車發(fā)動(dòng)機(jī)轉(zhuǎn)矩在線估計(jì)的精度,提出基于最小二乘支持向量機(jī)(LSSVM)和分布估計(jì)算法(EDA)的發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器的建模方法。該方法將發(fā)動(dòng)機(jī)的油門開度和轉(zhuǎn)速作為L(zhǎng)SSVM輸入,轉(zhuǎn)矩作為輸出,對(duì)轉(zhuǎn)矩與油門開度和轉(zhuǎn)速的關(guān)系進(jìn)行訓(xùn)練,通過分布估計(jì)算法優(yōu)化LSSVM的參數(shù)。基于最優(yōu)參數(shù)建立發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器,并用測(cè)試樣本進(jìn)行了比較。結(jié)果表明,采用EDA-LSSVM方法比遺傳算法-最小二乘支持向量機(jī)和網(wǎng)格搜索/交叉驗(yàn)證算法-最小二乘支持向量機(jī)的估計(jì)誤差小、運(yùn)算速度快和泛化能力強(qiáng)。
并聯(lián)混合動(dòng)力汽車;轉(zhuǎn)矩估計(jì);最小二乘支持向量機(jī);分布估計(jì)算法;參數(shù)優(yōu)化
前言
并聯(lián)混合動(dòng)力汽車在低速時(shí)以純電動(dòng)模式行駛,高速以及大負(fù)荷工況下以發(fā)動(dòng)機(jī)與電動(dòng)機(jī)聯(lián)合驅(qū)動(dòng)模式行駛,從而對(duì)車輛能量流的控制和能量消耗的優(yōu)化具有很大的靈活性,更容易實(shí)現(xiàn)低油耗和低排放的目標(biāo)[1-2]。但由于不同動(dòng)力源的瞬態(tài)響應(yīng)特性差異顯著,動(dòng)力源工作狀態(tài)的改變常常會(huì)導(dǎo)致動(dòng)力系統(tǒng)輸出轉(zhuǎn)矩的大幅變化甚至突變,從而引發(fā)動(dòng)力輸出的不平穩(wěn),對(duì)車輛產(chǎn)生較大的縱向沖擊,降低車輛的駕駛性能[3]。因此,對(duì)發(fā)動(dòng)機(jī)轉(zhuǎn)矩的實(shí)時(shí)辨識(shí)就顯得尤為重要,這是不同動(dòng)力源(發(fā)動(dòng)機(jī)與驅(qū)動(dòng)電機(jī))之間協(xié)調(diào)工作,保證整車動(dòng)力平穩(wěn)傳遞的基礎(chǔ)。
然而,發(fā)動(dòng)機(jī)是一個(gè)融合了機(jī)械、熱能、電子和化學(xué)等多學(xué)科的綜合性產(chǎn)物,其工作過程十分復(fù)雜,難以精確的動(dòng)力學(xué)模型來表示,對(duì)其工作參數(shù)的辨識(shí)也就顯得更加困難。目前,國(guó)內(nèi)外眾多學(xué)者在發(fā)動(dòng)機(jī)轉(zhuǎn)矩估計(jì)方面采用不同方法進(jìn)行了大量的研究:(1)平均值模型法[4],基于發(fā)動(dòng)機(jī)的工作循環(huán)得出動(dòng)態(tài)工況中發(fā)動(dòng)機(jī)工作參數(shù)的變化過程,但其通用性較差,計(jì)算復(fù)雜;(2)基于BP神經(jīng)網(wǎng)絡(luò)的模型[5-6],利用BP神經(jīng)網(wǎng)絡(luò)并行計(jì)算、容錯(cuò)性、泛化能力強(qiáng)的特點(diǎn)來估計(jì)發(fā)動(dòng)機(jī)的動(dòng)態(tài)轉(zhuǎn)矩,但其需要的訓(xùn)練樣本數(shù)較多,神經(jīng)網(wǎng)絡(luò)參數(shù)的選取對(duì)估計(jì)精度的影響較為敏感;(3)發(fā)動(dòng)機(jī)曲軸瞬時(shí)轉(zhuǎn)速法[7],其算法復(fù)雜,對(duì)系統(tǒng)的硬件要求高,實(shí)時(shí)性不能得到保證;(4)基于支持向量機(jī)的方法[8],利用貝葉斯推理求解模型的超參數(shù)進(jìn)行轉(zhuǎn)矩估計(jì),但其并未涉及參數(shù)優(yōu)化的問題。
據(jù)此,綜合考慮算法的運(yùn)算速度、泛化能力和試驗(yàn)樣本的數(shù)量等多方面因素,本文中提出采用基于分布估計(jì)算法的最小二乘支持向量機(jī)(EDA-LSSVM)方法建立發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器,通過試驗(yàn)與基于遺傳算法的最小二乘支持向量機(jī)(GA-LSSVM)和采用網(wǎng)格搜索/交叉驗(yàn)證算法優(yōu)化LSSVM(GSCV-LSSVM)進(jìn)行對(duì)比,結(jié)果表明,EDA-LSSVM方法的運(yùn)算速度快、估計(jì)誤差小、泛化能力強(qiáng),即使在樣本數(shù)據(jù)較少的情況下,仍能取得較好的辨識(shí)效果。
1 最小二乘支持向量機(jī)(LSSVM)
支持向量機(jī)是一種建立在統(tǒng)計(jì)學(xué)習(xí)理論基礎(chǔ)上的機(jī)器學(xué)習(xí)方法。該方法以結(jié)構(gòu)風(fēng)險(xiǎn)最小化為準(zhǔn)則,將低維空間的非線性問題映射到高維空間,轉(zhuǎn)化為線性問題求解,有效解決了小樣本、非線性、高維數(shù)、局部極小點(diǎn)等問題[9]。為了降低求解的復(fù)雜度,用最小二乘法求解線性方程組來取代原來的二次規(guī)劃函數(shù)估計(jì)問題,產(chǎn)生了最小二乘支持向量機(jī)。
若給定樣本集{(xq,yq),q=1,2,…,M},其中輸入值xq∈Rm,輸出值yq∈R,M為樣本個(gè)數(shù),通過非線性變換ψ(x)將xq映射到一個(gè)高維的特征空間(Hilbert空間),構(gòu)造優(yōu)化超平面:
f(x)=ω·φ(x)+b
(1)
式中:ω為權(quán)值系數(shù);b為閾值。由結(jié)構(gòu)風(fēng)險(xiǎn)最小化準(zhǔn)則,可轉(zhuǎn)化為求解如下優(yōu)化問題:
(2)
式中C為懲罰因子。
為將上式轉(zhuǎn)化為無約束對(duì)偶空間優(yōu)化問題,引入拉格朗日乘子,建立Lagrange函數(shù):
(3)
由KKT條件消去ω和ζ,同時(shí)根據(jù)Mercer定理,定義核函數(shù)K(xi,xj)=φ(xi)Tφ(xj),可得
(4)
用最小二乘法求出α和b,可得到系統(tǒng)模型為
(5)
2 采用分布估計(jì)算法的LSSVM參數(shù)尋優(yōu)
LSSVM中核函數(shù)的選取對(duì)算法性能有較大的影響。常見的核函數(shù)有線性函數(shù)、徑向基函數(shù)、Sigmoid函數(shù)和多項(xiàng)式函數(shù)等[10]。通過比較發(fā)現(xiàn):徑向基函數(shù)的泛化能力較強(qiáng),尤其適合處理樣本數(shù)據(jù)間的非線性關(guān)系,且函數(shù)表達(dá)形式簡(jiǎn)潔,易于實(shí)現(xiàn)LSSVM的優(yōu)化過程。因此,選擇徑向基函數(shù)K(x,xi)=exp(-||x-xi||2/(2σ2))為本文所研究LSSVM中的核函數(shù),對(duì)樣本數(shù)據(jù)進(jìn)行訓(xùn)練。LSSVM參數(shù)包含懲罰因子C和核函數(shù)寬度σ。懲罰因子C與可接受的誤差(訓(xùn)練誤差和校驗(yàn)誤差)成反比例,懲罰因子C越大,對(duì)擬合精度的要求越高,可接受的誤差值越小,訓(xùn)練的難度將越大;當(dāng)懲罰因子C過大時(shí),會(huì)出現(xiàn)過學(xué)習(xí)的現(xiàn)象,預(yù)測(cè)誤差反而增大。核函數(shù)寬度σ表征樣本數(shù)據(jù)映射到高維特征空間分布的復(fù)雜度,σ越大,擬合效果越好,但過大時(shí)泛化能力往往會(huì)變差。為提高估計(jì)的精度,有必要對(duì)LSSVM中的參數(shù)[C,σ]進(jìn)行優(yōu)化,尋找最佳的參數(shù)。
分布估計(jì)算法是一種基于群體搜索的進(jìn)化算法,它將遺傳算法與統(tǒng)計(jì)學(xué)習(xí)相結(jié)合,通過建立個(gè)體分布的概率模型,對(duì)此概率模型進(jìn)行采樣產(chǎn)生新的個(gè)體,如此反復(fù),實(shí)現(xiàn)個(gè)體的進(jìn)化,得到問題的最優(yōu)解[11-12]。應(yīng)用分布估計(jì)算法對(duì)LSSVM參數(shù)進(jìn)行優(yōu)化的流程如圖1所示。

圖1 分布估計(jì)算法參數(shù)尋優(yōu)流程圖
(1) 初始化參數(shù),采用一維的Logistic映射模型來初始化種群X=[C,σ],并確定尋優(yōu)的范圍、種群規(guī)模n和終止條件。
(2) 評(píng)價(jià)種群中個(gè)體的適應(yīng)度值,以樣本的均方誤差(RMSE)作為評(píng)價(jià)的適應(yīng)度函數(shù):
(6)
(3) 對(duì)種群中個(gè)體的適應(yīng)度進(jìn)行排序,建立帶權(quán)重的混合高斯模型。第j個(gè)個(gè)體的權(quán)重因子為
(7)
其中φ=q×n
(8)
式中q為修正系數(shù)。
(4) 對(duì)混合高斯模型進(jìn)行抽樣,生成k×n(k>1)個(gè)新個(gè)體,計(jì)算新個(gè)體的適應(yīng)度值,按照適應(yīng)度值選擇其中n個(gè)新個(gè)體作為下一代種群;
(5) 判斷是否滿足終止條件,如果不滿足則轉(zhuǎn)至(2)繼續(xù)執(zhí)行,直至樣本的均方誤差或迭代次數(shù)滿足要求。
3 觀測(cè)器的建立與結(jié)果討論
3.1 試驗(yàn)樣本獲取
以某發(fā)動(dòng)機(jī)廠生產(chǎn)的四缸柴油機(jī)為試驗(yàn)對(duì)象,在試驗(yàn)臺(tái)架上進(jìn)行穩(wěn)態(tài)性能試驗(yàn),發(fā)動(dòng)機(jī)的各項(xiàng)測(cè)試參數(shù)均通過基于LabView的測(cè)控系統(tǒng)獲得。臺(tái)架試驗(yàn)系統(tǒng)包含發(fā)動(dòng)機(jī)、聯(lián)軸器、測(cè)功機(jī)、現(xiàn)場(chǎng)測(cè)控柜、轉(zhuǎn)矩傳感器、轉(zhuǎn)速傳感器、溫度傳感器和工控機(jī)等。由油門/勵(lì)磁單元驅(qū)動(dòng)油門執(zhí)行器控制發(fā)動(dòng)機(jī)油門開度,而改變測(cè)功機(jī)的勵(lì)磁電流可實(shí)現(xiàn)轉(zhuǎn)速的調(diào)節(jié),通過轉(zhuǎn)矩傳感器可獲取當(dāng)前發(fā)動(dòng)機(jī)的輸出轉(zhuǎn)矩。所有的試驗(yàn)數(shù)據(jù)由LabView通過數(shù)據(jù)采集卡PCI8195采集,統(tǒng)一顯示在上位機(jī)的監(jiān)控界面上。
由于發(fā)動(dòng)機(jī)的油門開度較小,即輸出轉(zhuǎn)矩較小時(shí),轉(zhuǎn)矩的測(cè)定誤差較大,故試驗(yàn)中設(shè)定發(fā)動(dòng)機(jī)油門開度的下限值不應(yīng)過小,以免引入失效樣本。本文中發(fā)動(dòng)機(jī)的油門開度α分別設(shè)定在10%,25%,35%,50%,65%,75%,90%和100%,轉(zhuǎn)速ω設(shè)定在1 000~3 000r/min(間隔200r/min)之間,共采集了88個(gè)穩(wěn)態(tài)工況下的輸出轉(zhuǎn)矩T。將在不同的油門開度α和轉(zhuǎn)速ω下采集得到的轉(zhuǎn)矩T共同組成一樣本集{(αi,ωi,Ti),i=1,2,…,88}。將這些樣本數(shù)據(jù)分成兩部分:72組數(shù)據(jù)作為訓(xùn)練樣本,16組數(shù)據(jù)作為測(cè)試樣本。通過穩(wěn)態(tài)性能試驗(yàn)得到的發(fā)動(dòng)機(jī)轉(zhuǎn)矩MAP圖如圖2所示。
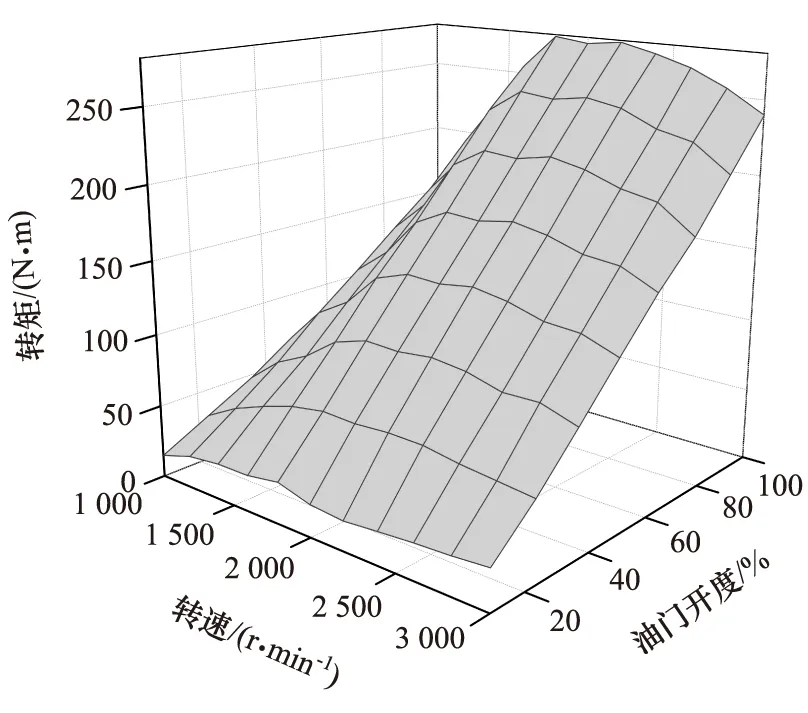
圖2 發(fā)動(dòng)機(jī)穩(wěn)態(tài)性能的轉(zhuǎn)矩MAP圖
3.2 觀測(cè)器的建立與參數(shù)設(shè)置

圖3 基于LSSVM的發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器結(jié)構(gòu)
用最小二乘支持向量機(jī)建立的發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器結(jié)構(gòu)如圖3所示,輸入量為油門開度α和轉(zhuǎn)速ω,輸出量為轉(zhuǎn)矩T。考慮到作為輸入量的樣本數(shù)據(jù)值差異較大會(huì)對(duì)LSSVM的精度有影響,應(yīng)對(duì)原始樣本數(shù)據(jù)進(jìn)行預(yù)處理(歸一化),用處理后的樣本數(shù)據(jù)作為觀測(cè)器的輸入量進(jìn)行訓(xùn)練、觀測(cè)。
用分布估計(jì)算法對(duì)LSSVM的參數(shù)[C,σ]進(jìn)行優(yōu)化,再基于最優(yōu)參數(shù)建立發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器。算法參數(shù)設(shè)置:種群數(shù)量n=100,最大迭代次數(shù)為120,k=2,參數(shù)C和σ的尋優(yōu)范圍分別設(shè)定為[10,500]和[0.1,10]。經(jīng)過60次左右迭代,適應(yīng)度值快速下降并趨于收斂,結(jié)果表明分布估計(jì)算法適用于LSSVM中參數(shù)[C,σ]的優(yōu)化,運(yùn)算速度快且有效收斂,適應(yīng)度曲線如圖4所示。

圖4 適應(yīng)度曲線變化趨勢(shì)
3.3 結(jié)果分析
為了對(duì)比采用EDA-LSSVM方法建立的轉(zhuǎn)矩觀測(cè)器和其它算法的在線估計(jì)效果,分別選擇遺傳算法(GA-LSS-VM)和網(wǎng)格搜索/交叉驗(yàn)證方法(LSSVM)來優(yōu)化支持向量機(jī)的參數(shù)[C,σ],并構(gòu)造相應(yīng)的觀測(cè)器。遺傳算法設(shè)置初始種群個(gè)數(shù)50,最大迭代次數(shù)200,二進(jìn)制編碼,采用隨機(jī)遍歷抽樣法,交叉概率為0.8,變異概率為0.25。大約經(jīng)過140次迭代后,適應(yīng)度值逐漸下降并趨于收斂。對(duì)比結(jié)果表明,與分布估計(jì)算法相比,遺傳算法的優(yōu)化過程較為緩慢。而網(wǎng)格搜索/交叉驗(yàn)證算法先在較大取值范圍內(nèi)對(duì)優(yōu)化參數(shù)進(jìn)行搜索優(yōu)化,得到優(yōu)化參數(shù)較小的取值區(qū)間。通過選擇合適的步長(zhǎng),在此小區(qū)間內(nèi)進(jìn)行交叉驗(yàn)證,以確定最優(yōu)參數(shù)。3種方法得到的LSSVM優(yōu)化參數(shù)如表1所示。

表1 3種方法的LSSVM參數(shù)設(shè)置
在相同的條件下,分別基于優(yōu)化后的參數(shù)建立轉(zhuǎn)矩觀測(cè)器并對(duì)訓(xùn)練樣本進(jìn)行訓(xùn)練。待訓(xùn)練完成后,選擇發(fā)動(dòng)機(jī)轉(zhuǎn)速在1 800和3 000r/min下各8個(gè)樣本作為測(cè)試樣本集,評(píng)估3種觀測(cè)器的轉(zhuǎn)矩觀測(cè)精度,結(jié)果如表2所示。從表中可以看出,采用EDA-LSSVM方法的估計(jì)效果最為接近實(shí)際值,誤差波動(dòng)小,兩組測(cè)試樣本的平均絕對(duì)百分比誤差分別為0.49%和0.33%,表明分布估計(jì)算法是適用于最小二乘支持向量機(jī)的參數(shù)優(yōu)化;GA-LSSVM方法的估計(jì)效果次之,優(yōu)化中采用的隨機(jī)遍歷抽樣法,對(duì)搜索解空間的能力有限,容易收斂到局部最優(yōu)值,結(jié)果的可靠性不理想;而采用網(wǎng)格搜索/交叉驗(yàn)證算法優(yōu)化LSSVM參數(shù)的估計(jì)值與實(shí)際值背離較遠(yuǎn),誤差較為明顯。表明待優(yōu)化參數(shù)網(wǎng)格區(qū)間劃分和交叉驗(yàn)證時(shí)步長(zhǎng)大小的選擇對(duì)觀測(cè)器的觀測(cè)效果有較大影響。目前,還沒有理論來指導(dǎo)網(wǎng)格劃分和步長(zhǎng)選擇,只能通過多次測(cè)試尋找最優(yōu)值。
同時(shí),為進(jìn)一步驗(yàn)證采用EDA-LSSVM方法建立觀測(cè)器的精度和有效性,分別采用平均相對(duì)誤差(MRE)、均方誤差(RMSE)和泰爾系數(shù)(TIC)指標(biāo)來評(píng)價(jià)這3種方法。3種指標(biāo)計(jì)算公式見式(9)~式(11),結(jié)果見表3。
(9)
(10)
(11)
從表3中可以看出,在兩組不同的測(cè)試集中,相比其他兩種方法,EDA-LSSVM都取得了較好的觀測(cè)效果,表明采用分布估計(jì)算法優(yōu)化最小二乘支持向量機(jī)的參數(shù),建立發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器的效果較為理想,具有觀測(cè)精度高,誤差波動(dòng)小,運(yùn)算速度快,泛化能力強(qiáng)等優(yōu)點(diǎn)。
4 結(jié)論
本文中提出了基于最小二乘支持向量機(jī)的發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器建模方法,通過分布估計(jì)算法、遺傳算法和網(wǎng)格搜索/交叉驗(yàn)證優(yōu)化最小二乘支持向量機(jī)的參數(shù)[C,σ]。經(jīng)過試驗(yàn)驗(yàn)證,采用EDA-LSSVM方法建立的發(fā)動(dòng)機(jī)轉(zhuǎn)矩觀測(cè)器的估計(jì)誤差小,觀測(cè)精度高,運(yùn)算速度快,說明該方法能夠準(zhǔn)確逼近發(fā)動(dòng)機(jī)工作中轉(zhuǎn)矩的動(dòng)態(tài)變化。即使在訓(xùn)練樣本個(gè)數(shù)較少的情況下,仍能取得較好的觀測(cè)效果,為發(fā)動(dòng)機(jī)轉(zhuǎn)
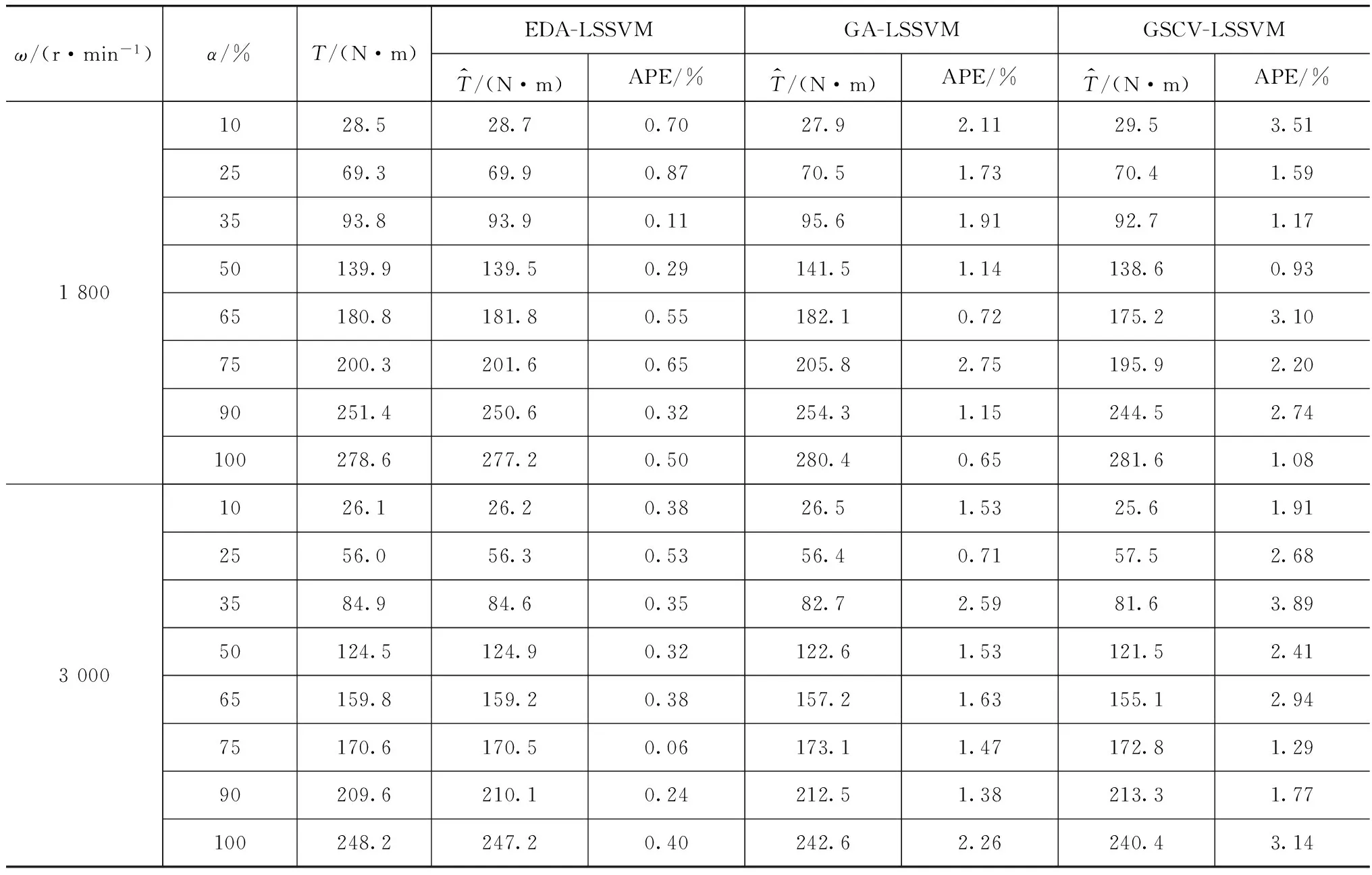
表2 3種方法的發(fā)動(dòng)機(jī)轉(zhuǎn)矩估計(jì)結(jié)果


表3 3種方法的估計(jì)誤差
矩在線估計(jì)提供了一種新的有效方法。
[1] 王磊,張勇,舒杰,等.基于模糊自適應(yīng)滑模方法的混聯(lián)式混合動(dòng)力客車模式切換協(xié)調(diào)控制[J].機(jī)械工程學(xué)報(bào),2012,48(14):119-127.
[2] 趙治國(guó),何寧,朱陽(yáng),等.四輪驅(qū)動(dòng)混合動(dòng)力轎車驅(qū)動(dòng)模式切換控制[J].機(jī)械工程學(xué)報(bào),2011,47(4):100-109.
[3] KOPRUBASI K, WESTERVELT E R, RIZZONI G. Towardthe systematic design of controllers for smooth hybrid electric vehicle mode changes[C]. Proceedings of the 2007 American Control Conference, USA,2007:2985-2990.
[4] 葉曉.并聯(lián)混合動(dòng)力汽車控制策略研究[D].北京:清華大學(xué),2013.
[5] 嚴(yán)運(yùn)兵,陳華明,張光德.并聯(lián)混合動(dòng)力汽車的發(fā)動(dòng)機(jī)轉(zhuǎn)矩估計(jì)[J].汽車工程,2008,30(2):117-120.
[6] 杜常清,顏伏伍,楊平龍,等.基于BP神經(jīng)網(wǎng)絡(luò)的發(fā)動(dòng)機(jī)轉(zhuǎn)矩估計(jì)[J].汽車工程,2009,31(7):588-591.
[7] 童毅.并聯(lián)式混合動(dòng)力系統(tǒng)動(dòng)態(tài)協(xié)調(diào)控制問題的研究[D].北京:清華大學(xué),2004.
[8] VONG Chiman, WONG Parkkin, LI Yiping. Prediction of automotive engine power and torque using least squares support vector machines and Bayesian inference[J]. Engineering Applications of Artificial Intelligence,2006,19:277-287.
[9] 韓曉慧,杜松懷,蘇娟,等.基于參數(shù)優(yōu)化的最小二乘支持向量機(jī)觸電電流檢測(cè)方法[J].農(nóng)業(yè)工程學(xué)報(bào),2014,30(23):238-245.
[10] 江輝,劉國(guó)海,梅從立,等.基于OC-SVM和近紅外光譜的秸稈固態(tài)發(fā)酵進(jìn)程監(jiān)測(cè)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2012,43(10):114-117.
[11] KARSHENAS H, SANTANA R, BIELZA C, et al. Regularized continuous estimation of distribution algorithms[J]. Applied Soft Computing,2013,13(5):2412-2432.
[12] WAN Z, MAO L, WANG G. Estimation of distribution algorithm for a class of nonlinear bilevel programming problems[J]. Information Sciences,2014,256:184-196.
Online Estimation of Engine Torque for Parallel Hybrid ElectricVehicle Based on Least Squares Support Vector Machine
Tian Xiang, He Ren & Xu Yiqiang
SchoolofAutomotiveandTrafficEngineering,JiangsuUniversity,Zhenjiang212013
To improve the online estimation accuracy of engine torque for a parallel hybrid electric vehicle, a modeling method of engine torque observer based on least squares support vector machine (LSSVM) and estimation of distribution algorithm (EDA) is proposed. In the method, with throttle opening and engine speed as inputs of LSSVM and engine torque as output of LSSVM, the relation between inputs and output is trained and the parameters of LSSVM are optimized by EDA. Based on optimal parameters, an engine torque observer is built and then compared by test samples. The results show that the EDA-LSSVM method has smaller estimation error, higher calculation speed and stronger generalization ability than the LSSVM methods with their parameters optimized by genetic algorithm and grid search with cross validation.
parallel hybrid electric vehicle; torque estimation; least squares support vector machine; estimation of distribution algorithm; parameter optimization
*江蘇省高校自然科學(xué)研究重大項(xiàng)目(13KJA580001)和江蘇高校優(yōu)勢(shì)學(xué)科建設(shè)工程項(xiàng)目資助。
原稿收到日期為2015年8月21日,修改稿收到日期為2015年11月19日。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17
