基于CAN總線的船舶電站監控系統的設計*
2016-04-08 01:44:06劉艷平王東陽賈金偉
艦船電子工程 2016年1期
劉艷平 王東陽 賈金偉
(91404部隊92分隊 秦皇島 066001)
?
基于CAN總線的船舶電站監控系統的設計*
劉艷平王東陽賈金偉
(91404部隊92分隊秦皇島066001)
摘要采取CAN總線結構,基于某型船舶電站監控系統進行重新設計,進一步優化結構。由智能控制終端和電站機組控制器雙重控制,提高控制精度的冗余度。設計由PLC控制的PPU保護裝置,使得電站監控變得更為容易。
關鍵詞電站監控; CAN總線; PPU控制; 智能保護
Design of the Ship Power Station Monitoring System Based on CAN-bus
LIU YanpingWANG DongyangJIA Jinwei
(Unit 92, No. 91404 Troops of PLA, Qinhuangdao066001)
AbstractA new system is redesigned based on a certain type of ship power station monitoring system, which has been using CAN-bus. Controlling by intelligent control terminal and power plant unit controller, redundancy of control precision is improved. Power station monitoring can be easier because PPU protection device is controlled by PLC.
Key Wordspower station monitoring, CAN-bus, PPU-control, intelligent protection
Class NumberTP211
1引言
與其他總線相比,現場總線具有分散式、數字化、雙向、多站點等特點,且效率高、可靠性好、智能化高、連接方便[2]。鑒于其卓越的性能、極高的可靠性和實用性、獨特的設計,現場總線被廣泛應用于自動化領域。船舶電站自動化程度高、監控相對分散,要求信息傳遞實時、雙向,因而現場總線在船舶電站監控系統中廣泛應用,并取得了良好效果。
本文采用CAN總線,以某型船舶電站監控系統為依據,重新設計,優化電站監控系統結構。同時,設計由智能控制終端和電站機組控制器雙重控制的電站監控結構,通過集中控制和分散控制雙重控制,從而提高系統控制精度的冗余度。電站保護裝置監控設計由PLC(Programmable Logic Controller)控制的PPU(Paralleling and Protection Unit)為控制系統核心的監控結構,使得發電機自動并車、逆功率保護、過流保護等以及電網電壓、電流和電池組電壓、電流的監測變得更為容易。
2船舶電站監控系統特點
隨著現代船舶(尤其是軍用船舶)電氣化、自動化、智能化程度的不斷提高以及現代網絡技術的普遍應用,智能化管理和集中監控船舶系統的各項參數指標在整個系統中占據著極其重要的位置[3]。船舶電站是整個船舶以及電力系統的核心,自動化、智能化程度要求極高,尤其是無人值班的要求對船舶電站智能監控提出了更高要求。良好的監控系統可以大大降低工作人員勞動強度,提高工作效率,提高供電的穩定性和可靠性[4],因而智能化程度極高的電站監控系統有待深入研究。
船舶電站監控自動化是船舶機艙自動化的一個重要構成,也是船舶技術現代化的重要標志。船舶電站監控技術同機艙控制技術一樣,是隨著通信技術、微處理器技術、控制技術的進步而不斷發展的[5]。分離器件控制方法應用于20世紀六十至七十年代船舶電站監控系統;分布式控制系統(DCS)的誕生,預示著船舶電站監控技術迅猛發展和取得突破性進展。經過四十多年的發展,DCS控制系統趨于已完善和成熟,但是,因其不具有開放互連性,且容易因系統總體網絡失效從而導致系統癱瘓。鑒于DCS缺限,推動了CAN等現場總線技術的發展,從而為船舶電站監控系統技術的發展開辟了一個新的領域。
3船舶電站監控平臺構成
本監控系統采用智能控制終端(計算機)、CAN總線、可編程控制PLC、自動控制等技術,主要由智能控制終端的集中控制技術和由PLC控制的PPU為電站保護的自動控制技術為核心。
為保證船舶電站的安全、可靠,本系統采用CAN網絡節點分散布置,從而使系統的監控功能徹底分散。PLC控制的PPU控制可使發電機自動并車、逆功率保護、過流保護等容易實現,同時可以通過PLC的編程功能實現電站的智能控制和自動保護。在智能保護裝置失效后,由智能控制終端的智能機提供冗余度保護,為電站監控提供高安全度和高可靠性。報警燈板對超限值進行報警,提供聲光報警。三個跨接開關控制器根據系統系統運行狀態智能控制跨接開關。本實例中以某型船舶監控系統為例,對四臺機組進行控制,如需擴充,可增加控制和測量節點。
4基于CAN總線的船舶監控系統設計方案
本系統以某型船舶監控系統為例,采用了CAN總線通信、集中控制與分散控制以及電站智能控制保護等技術,并對系統重新設計,達到結構優化的目的。具體方案如圖1所示。
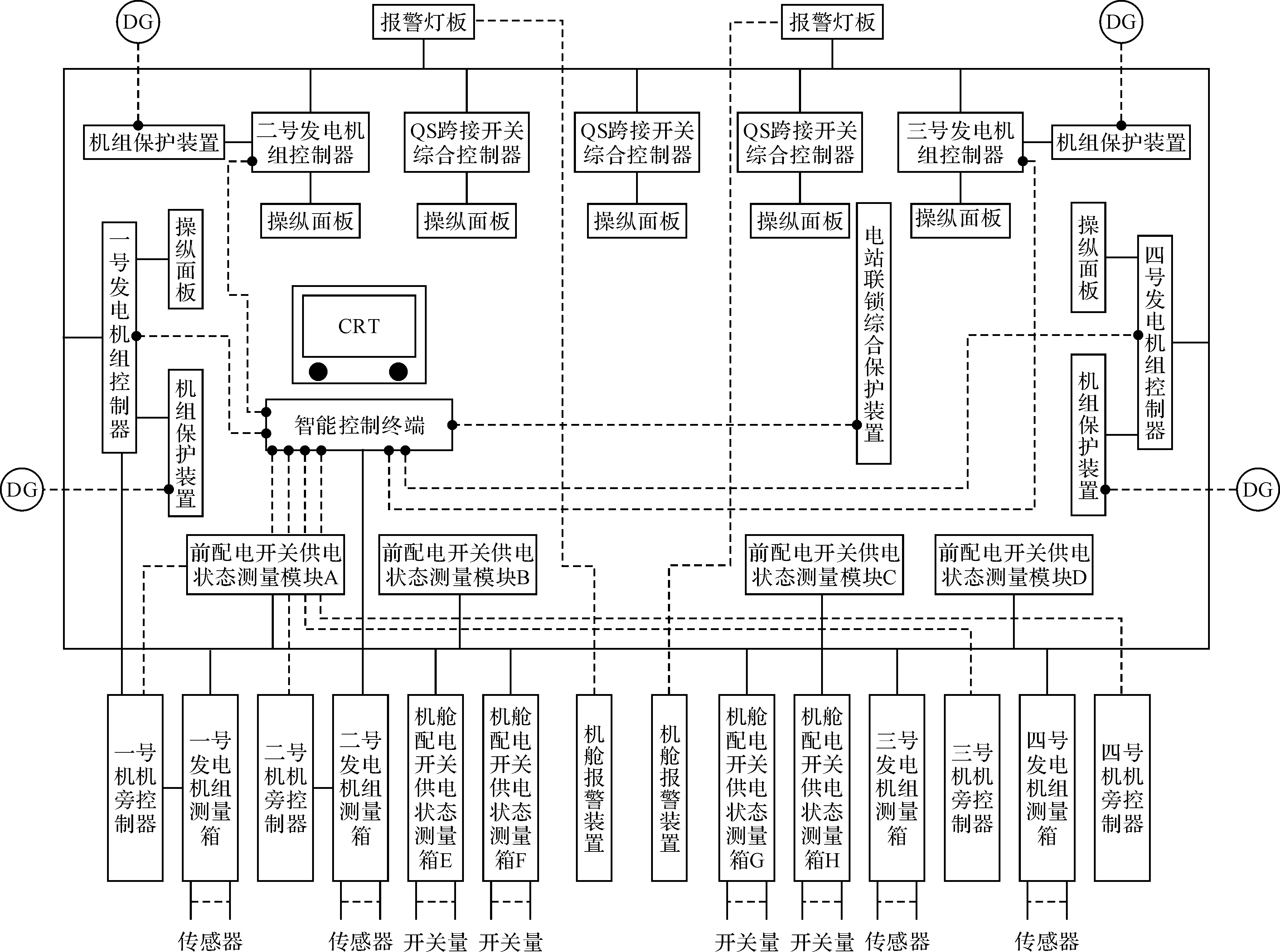
圖1 船舶監控系統設計方案
4.1采用CAN總線通信
CAN總線是一種串行、雙向、對稱多主控站的數字數據通信鏈路,可溝通現場設備之間以及更高層次站級設備之間的聯系[6]。其優點是安全性好、可靠性高、實時性強;同時,網絡構成簡單,硬件成本低。CAN網絡設計采用了符合開放系統互聯模型(OSI)規范的三層結構模型,即物理層、數據鏈路層以及應用層。其傳輸介質為雙絞線,通信速率最高為1Mb/s,傳輸距離最遠為10km,掛接設備數最多為110個。
4.2集中控制與分散控制結合
監控系統采用了集中控制和分散控制結合的技術。PLC控制的PPU控制可使發電機自動并車、逆功率保護、過流保護等容易實現,同時可以通過PLC的編程功能實現電站的智能控制和自動保護(分散控制)。在智能保護裝置失效后,由智能控制終端的智能機提供冗余度保護,為電站監控提供高安全度和高可靠性(集中控制)。電站監控雙重控制簡化結構如圖2所示。

圖2 電站監控簡化圖
4.3電站保護裝置監控設計

圖3 電站保護裝置監控原理
船舶電力系統容量雖小,但是對供電可靠性要求非常高。在無人值守的自動化電站,要求有完善的防范措施,當出現設備故障或導致全船斷電的趨勢時,采用備用機組替換故障機組,以保持供電的連續性。即使出現斷電現象,也要保證斷電時間最短,盡快恢復供電[7]。
本系統中電站保護采用PLC控制的PPU控制。PLC發出并車指令給PPU,PPU接到并車指令,自動檢測待并發電機與電網的電壓、頻率和相位差,并根據系統設定值做相應調整,直至符合并車條件,控制主開關閉合,將待并發電機投入電網。同時,檢測傳感器感受電壓、頻率以及相位差變化,將信息傳送報警燈板,通過聲光信息進行報警。具體原理如圖3所示。
5結語
本系統設計主要從系統結構、數據通信、保護控制、實時監測等方面進行了考量,對監控系統結構優化、性能提高所突破,為新型號船舶監控系統設計起到了可借鑒作用。
參 考 文 獻
[1] 陶杰.基于CAN總線的多品牌小型PLC監控系統的設計與實現[D].蘇州:蘇州大學,2009:1-12.
[2] 來清民,曲賀梅.基于CAN總線的分布式三維步進電機控制系統[J].微計算機信息,2005(10):40-42.
[3] 劉立坤.智能型船舶電站控制器的研究[D].大連:大連海事大學,2010:1-2.
[4] 宋超,李功宣,余向東.PLC及其通信技術在艦船監控系統中的應用[J].測控技術,2004,23(4):41-42.
[5] 江忠明,杜軍,丁穎華,等.基于CAN現場總線的船舶電站監控系統[J].機電設備,2002,1(19):19-22.
[6] 李文華,邱志強,孫瑜,等.基于現場總線的船舶電站實時監控系統研究[J].艦船科學技術,2005,27(2):39-41.
[7] 姜錦范.船舶電站及自動化[M].大連:大連海事大學出版社,2005.
中圖分類號TP211
DOI:10.3969/j.issn.1672-9730.2016.01.025
作者簡介:劉艷平,男,碩士,助理工程師,研究方向:電力電子與電力傳動。
*收稿日期:2015年7月1日,修回日期:2015年8月29日
