基于ADPCA的三通道合成孔徑雷達目標定位技術研究*
2016-04-08 01:44:04張友方
艦船電子工程 2016年1期
蔣 一 王 銳 張友方
(陸軍軍官學院 合肥 230031)
?
基于ADPCA的三通道合成孔徑雷達目標定位技術研究*
蔣一王銳張友方
(陸軍軍官學院合肥230031)
摘要針對相位中心偏置天線(DPCA)技術對載機速度、脈沖重復頻率和相位中心間距之間的嚴格限制條件,提出了基于和差波束的自適應相位中心偏置天線技術(ADPCA)的三通道合成孔徑雷達運動目標檢測(SAR-GMTI)方法,進行地面運動目標的檢測。仿真結果表明,在強雜波的背景下,能有效抑制雜波,改善了弱目標的檢測性能。
關鍵詞機載合成孔徑雷達; 自適應偏移相位中心天線; 和差波束
Location Analysis of Tri-channel SAR-GMTI Based on ADPCA
JIANG YiWANG RuiZHANG Youfang
(Army Office Academy, Hefei230031)
AbstractFor the strict requirement of DPCA on carrier velocity, pulse repetition frequency and the distance between aperture centers, a tri-channel SAR-GMTI method based on adaptive DPCA of ΣΔ-beams is proposed to detect the moving target. Simulation results prove that the proposed method can effectively suppress the clutter even in strong clutter environment, improve the detection performance of weak target.
Key Wordsairborne SAR, ADPCA, ΣΔ beam
Class NumberTN957.5
1引言
基于SAR的地面運動目標檢測與成像技術在軍事偵察中具有很高的應用價值,已成為SAR信號處理領域的一個重要研究方向。目前多通道SAR系統運動目標檢測方法主要有相位中心偏置天線(DPCA)技術、空時自適應處理、沿跡干涉處理、解卷積法等[1]。其中,DPCA作為一種簡單化的STAP方法,具有良好的雜波抑制能力,運算量少[2~7]。但經典的DPCA技術要求載機速度、脈沖重復頻率和相位中心間距之間必須滿足嚴格的條件,使其在實際應用中受到了一定的限制。因此,利用和差波束形成的ADPCA技術可以突破上述條件的限制,易于工程實現。
2基于和差波束的ADPCA原理
基于和差波束的ADPCA實現框圖如圖1所示,它利用單脈沖雷達差通道信號形成校正信號,將自適應加權后的校正信號作為補償信號,對相鄰脈沖和通道信號的對消剩余進行補償,以此抑制雜波[8]。
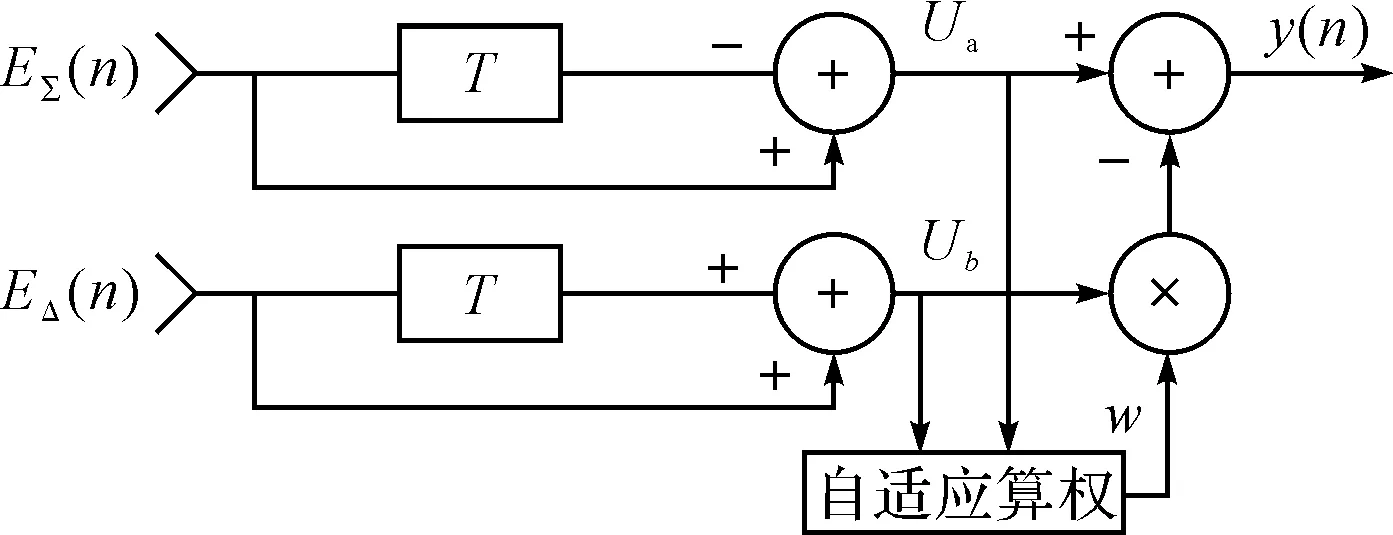
圖1 ADPCA實現框圖
和差波束的形成原理如圖2所示,和通道信號與差通道信號之間滿足下列關系:
(1)
其中,Δ表示差通道信號,Σ表示和通道信號,θ為目標對天線軸的偏角,λ為載波波長。
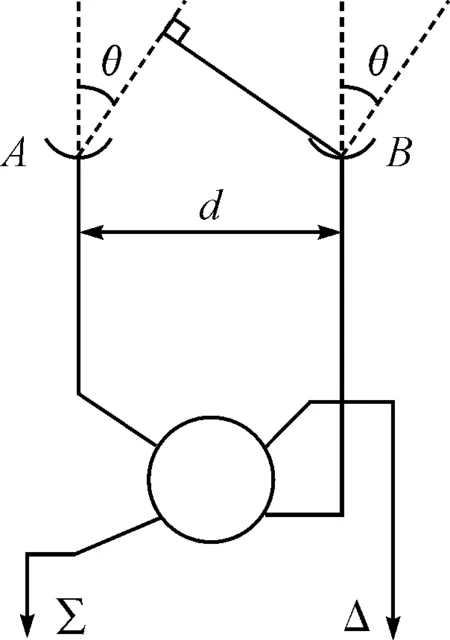
圖2 和差波束形成原理
由圖2可得:
(2)
顯然,將式(2)結果作為加權因子w對差通道信號加權后作為補償信號,即可對消相鄰脈沖地面回波和通道信號的對消剩余,即使得式(2)的輸出為零。
3三通道ADPCA-GMTI實現方法
3.1回波信號模型
三通道SAR-GMTI模式在一個波位下的空間幾何關系如圖3所示[9~10]。
A、B、C三個孔徑接收的回波信號經過同步檢波并距離向壓縮,考慮到相掃天線和差波束形成前,應先進行主雜波的跟蹤,去掉多普勒中心頻率的影響,并對A、B、C三路信號均以同一距離單元上的靜止參考點P對回波的二次項作運動補償,得到補償后的回波信號。
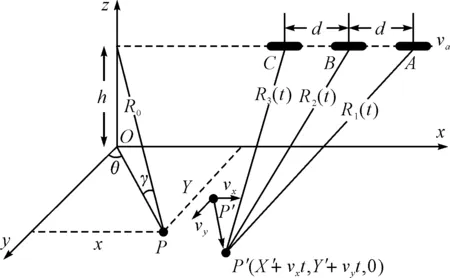
圖3 三通道SAR空間幾何關系圖
3.2基于和差波束的ADPCA處理
由前一節的分析可知,相控陣天線和差波束形成前,須先補償掉A、B兩路和B、C兩路接收天線的陣內相位差,從而在t時刻和t+T時刻,A、B兩路信號形成的和差波束,Σt(AB)、Δt(AB)和Σt+T(AB)、Δt+T(AB),以及B、C兩路的Σt(BC)、Δt(BC)和Σt+T(BC)、Δt+T(BC)。
和差波束形成后,按照圖1所示ADPCA的實現流程,對A、B兩路作ADPCA處理:
(3)
通過分析可知,對于靜止目標,采用最佳權值將被完全抑制掉,而對于該距離單元內的運動目標而言,對消結果為
yAB(t)=UABa(t)-wAB(X′)·UABb(t)
(4)
可見,相鄰脈沖對消后慢動目標的輸出信號不為零。因此,基于和差波束的ADPCA對消過程可以抑制靜止雜波,而保留運動目標信息。
3.3動目標檢測及定位
三通道SAR-GMTI系統在一發三收工作模式下進行雜波抑制和運動目標檢測,三路數據經過上述誤差補償和DPCA雜波對消后可以得到兩路動目標檢測數據,對其中任意一路數據可以通過恒虛警檢測完成地面運動目標的檢測。
經相參積累后,在檢測到運動目標位置處,該單元的相位值反映了運動目標的方位,據此可以對運動目標的真實方位進行估計。對A、B和B、C經過ADPCA處理后的結果進行干涉處理,可以分別得到運動目標方位估算值。
運動目標真實方位的估計值為
(5)
距離向估計值由檢測到運動目標的單元對應的距離門給出:
(6)
(7)
利用雙路ADPCA干涉處理進行對動目標的定位,能有效地克服相位模糊帶來的問題,而且這種定位是在主雜波已被抑制掉的兩路信號中進行的,因此定位精度較高。
3.4動目標測速
運動目標位置已經精確估計的前提下,假定vx、vy合成的徑向速度為v,設動目標所在單元的擦地角γ′,方位斜視角θ′,則根據空間幾何關系進而求得運動目標方位向與距離向速度的估計值為
(8)
至此,完成了對運動目標的檢測及其參數的估計。基于和差波束ADPCA技術的三通道SAR-GMTI的流程圖如圖4所示。
4計算機仿真驗證
4.1主要仿真參數及雜波仿真
波長λ=0.03m,發射帶寬B=20MHz,發射脈沖寬度Ts=20μs,采樣頻率fs=25MHz,脈沖重復頻率prf=1200Hz,雷達作用距離R0=180km,載機高度h=5km,載機速度va=110m/s,天線方位向尺寸Da=1.5m,波束方位斜視角θ=-45°~45°,步進幅度為1°,每個波位發射脈沖數為66個,通道間距d=0.5m。

圖4 基于ADPCA的三通道SAR-GMTI流程圖
4.2仿真結果
仿真中,設置兩個點運動目標:動目標1初始位置在區域中心[0,0]處,徑向速度為2.4m/s,信雜比設為-10dB。動目標2相對于區域中心的初始位置為[120m,600m],徑向速度為-7.0m/s,信雜比設為-15dB。在θ=30°對應的波位下,對SAR-GMTI模式下的ADPCA運動目標檢測性能進行仿真。
圖5是廣域搜索模式下,SAR點陣場景的仿真結果,由于兩個運動目標的信雜比較低,所以淹沒在背景雜波中無法分辨。
圖6、圖7是A、B通道和B、C通道雜波對消后相參積累的結果。可以看出雜波得到有效抑制,兩個運動目標得以凸顯出來。同時注意到,目標散焦明顯且周圍仍存在少量雜波剩余。
表1是運動目標的檢測、定位及測速結果。由表中可以看出,目標的定位及測速結果具有較好精度。該模式下運動目標檢測的優點在于可以實現對大區域范圍內運動目標的快速檢測。
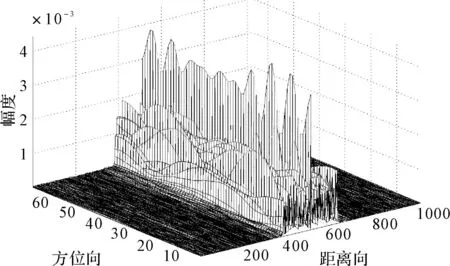
圖5 點陣場景(含兩個運動目標)
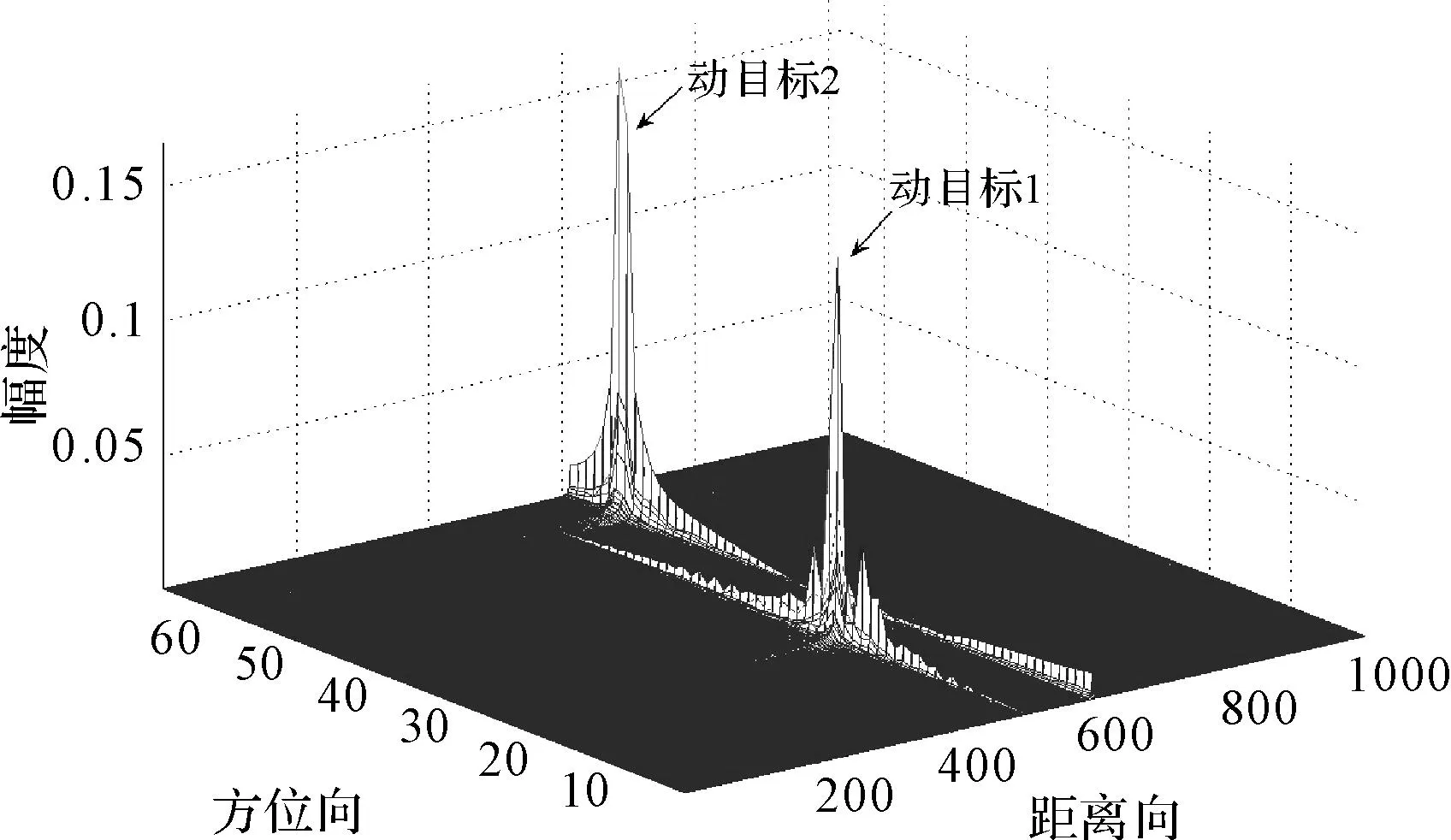
圖6 A、B通道雜波對消后相參積累結果
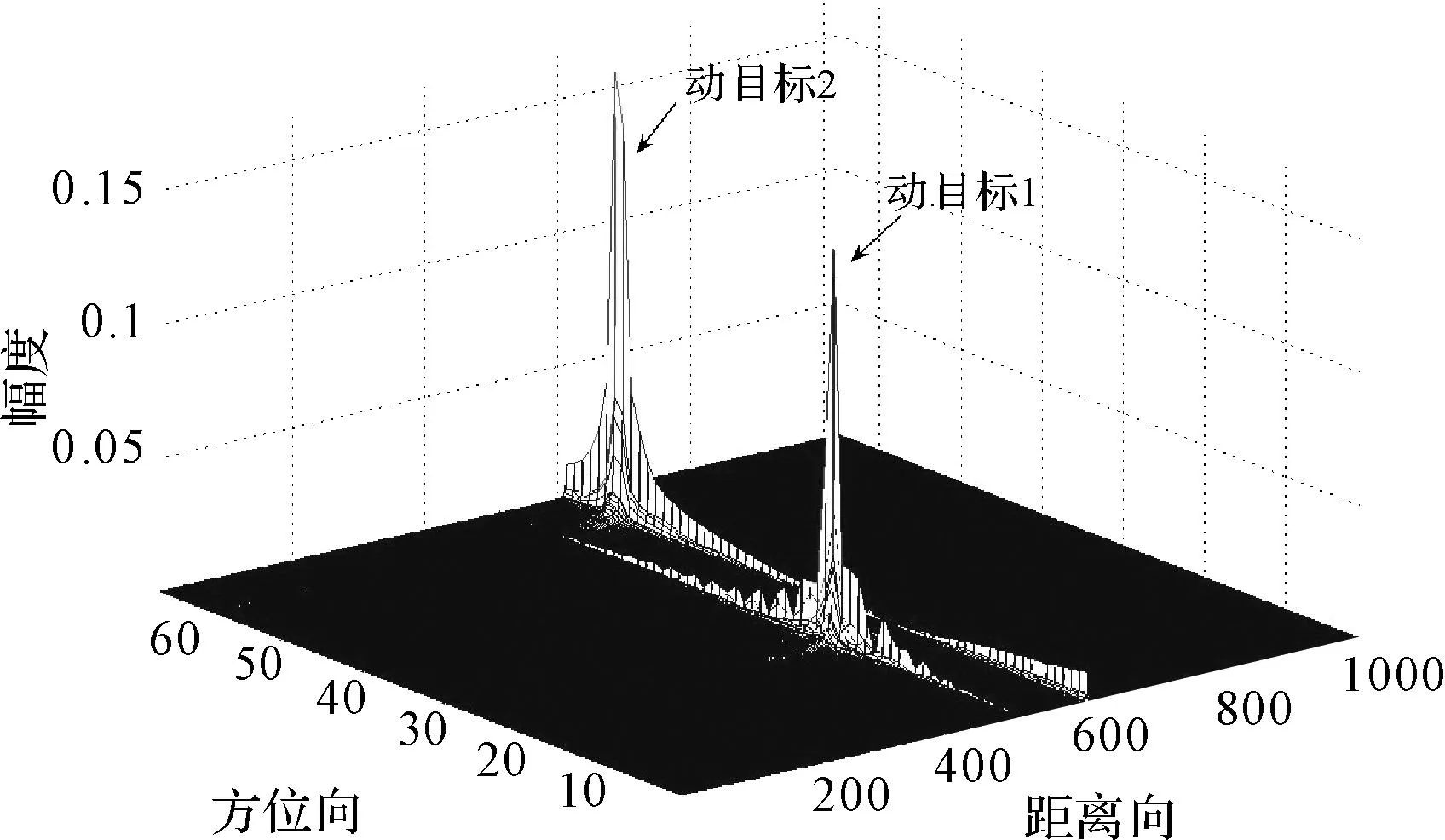
圖7 B、C通道雜波對消后相參積累結果

目標編號實際位置(m)估計位置(m)方位向距離向方位向距離向實際速度(m/s)估計速度(m/s)速度估計絕對誤差(%)100-9.015.202.42.7174-13.232120600127.37599.13-7.0-6.7248-3.93
5結語
針對相位中心偏置天線技術對載機速度、脈沖重復頻率和相位中心間距之間的嚴格限制條件,提出了基于ADPCA技術的三通道SAR運動目標檢測方法。該方法具有很好的系統誤差補償效果和定位精度,實現簡單,是當前機載雷達較為可行的實時信號處理方案。
參 考 文 獻
[1] Lightstone L. Antenna Distrotions in Multiple Phase Centre Interferometric Systems[J]. IGARSS’94,1994,4(8-12):1980-1982.
[2] R. L. Fante. Analysis of the Displace-Phase-Center Radar for Clutter Reduction Mitre Corporation Report[R]. August 1989, MTI10666.
[3] Richard E. Carnade. Dual Baseline and Frequency Along-Track Interferometry[J]. IEEE,1992(2):1585-1588.
[4] Callaghan G D, Longstaff I D. Wide-swath space-borne SAR and range ambiguity[C]//Proceedings of Radar 97,1997:248-252.
[5] N. Gebert, G. Krieger, A. Moreira. SAR signal reconstruction from non-uniform displaced phase center sampling in the presence of perturbations[J]. IEEE Transactions on Instrumentation and Measurement,2005,46(3):1034-1037.
[6] G. Krieger, N. Gebert, A. Moreira. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling[J]. IEEE Geoscience and Remote Sensing Letters,2004,1(4):260-264.
[7] Hans Steyskal, Jone K. Schindler, Peter Franchi, et al. Mailloux, Pattern Synthesis for TechSat21-A Distributed Space-Based Radar system[C]//Aerospace Conference, 2001, IEEE Processing, Volnum: 2,2001:725-732.
[8] 沈明威,朱岱寅,朱兆達.和差波束頻域自適應DPCA技術研究[J].現代雷達,2010,4(32):59-62.
[9] 呂孝雷,蘇軍海,邢孟道,等.三通道SAR-GMTI誤差校正方法的研究[J].系統工程與電子技術,2008,30(6):1037-1042.
[10] 李亞超,李曉明,邢孟道,等.天線斜置情況下三通道SAR-GMTI技術研究[J].電子與信息學報,2009,31(3):578-582.
中圖分類號TN957.5
DOI:10.3969/j.issn.1672-9730.2016.01.013
作者簡介:蔣一,女,碩士,講師,研究方向:雷達信號處理。王銳,女,碩士,講師,研究方向:信號處理、信息檢索。張友方,男,碩士,講師,研究方向:數字圖像處理。
*收稿日期:2015年7月3日,修回日期:2015年8月28日
