紅外探測與追蹤的雙機被動定位模型
2016-04-07 03:44:27郝振興羅繼勛胡朝暉李文超
探測與控制學報 2016年1期
郝振興,羅繼勛,胡朝暉,李文超
(1.空軍工程大學航空航天工程學院,陜西 西安 710038;
2.解放軍95896部隊,河北 滄州 061736)
?
紅外探測與追蹤的雙機被動定位模型
郝振興1,羅繼勛1,胡朝暉1,李文超2
(1.空軍工程大學航空航天工程學院,陜西 西安 710038;
2.解放軍95896部隊,河北 滄州 061736)
摘要:針對機載紅外探測與追蹤(IRST)被動定位的精度低和解算速度慢及多機間信息大容量實時傳輸問題,提出了兩種應用激光數據鏈傳輸信息的IRST雙機被動定位模型。模型均基于測向交叉定位原理構建,模型一的基線距離已知,兩機坐標未知;模型二的兩機坐標已知,基線距離未知;并對比了兩種模型的特性。仿真表明,測角誤差減小,兩機距離增大,會提高定位精度;模型二的計算速度優于模型一,但目標高度大于1 km時,模型二失效;雙機與目標構成等腰三角形且兩載機的交角為110°時,定位的精度最高。
關鍵詞:激光數據鏈;機載紅外探測與追蹤;測向交叉定位;幾何精度因子
0引言
被動(無源)探測定位系統利用目標輻射源的輻射信息探測目標并確定出目標位置,具有作用距離遠、隱蔽性能好等優點,在現代信息化戰爭中有著廣泛的應用前景[1]。機載IRST系統被動定位一般分為單機和多(雙)機平臺的被動定位。文獻[2]研究了IRST單站被動定位系統問題,分析了單站被動測距的幾種典型算法。但是對于運動目標,單機必須做適當的機動,滿足可觀測條件才能實現對目標的定位跟蹤,單機紅外搜索跟蹤系統探測精度也因電子干擾技術的進步、隱身技術的突破性進展而降低。文獻[3]建立了雙機協同探測定位跟蹤模型,利用雙機IRST系統探測到目標方位角和俯仰角,結合非線性濾波算法估計出目標位置信息,但該算法的解算占用較多的計算機資源和時間,而且一般的機間射頻通信不僅無法實時傳輸大容量的原始紅外圖像信息,在一定程度上還破壞了“隱蔽性”。文獻[4]提出基于激光鏈路的IRST信息處理方法,機載激光數據鏈能滿足海量圖像信息量傳輸和隱蔽性要求。文獻[5-6]分別提出針對IRST探測跟蹤目標并提取信息的濾波算法。文獻[7]針對無源同高度固定雙站測向交叉定位原理與精度進行了初步分析,給出了影響精度的部分因素。為此,在上述文獻研究成果的基礎上,本文針對機載IRST被動定位的精度低和解算速度慢及多機間信息大容量實時傳輸問題,提出了應用激光數據鏈進行信息傳輸,基于測向交叉定位原理的兩種IRST雙機被動定位模型。
1定位理論
1.1應用激光通信鏈路的雙機IRST被動定位原理
應用激光通信鏈路的被動定位方法是先檢測出融合圖像中存在的目標個數,然后計算目標相對于觀測載機的測向線,因此不存在測向線相交而產生的虛假目標,提高了多目標被動定位的準確性。圖1為原理圖。
圖1 應用激光數據鏈路的被動定位原理圖Fig.1 Passive locotion principle of laser data chains
假設長、僚機編隊飛行,協同探測同一目標區域,且IRST系統獨立工作,長機的融合中心將同一場景不同視角的兩幅紅外圖像進行預處理、變換空間、像素級融合等操作,導出更有效、更全面的紅外圖像,再根據目標與背景圖像的差別檢測出目標在圖像中的位置信息[8-9]。結合長、僚機的狀態信息、IRST系統相對于目標的偏角,利用測向交叉定位原理就能得到目標的距離信息。
其中,載機自身運動參數通過機載測量設備測得。僚機的所有數據信息通過激光數據鏈路傳輸到長機的融合中心,長機的所有數據信息通過機載光纖總線傳到融合中心。
1.2測向交叉定位原理
多機IRST測向交叉定位是利用多個機載IRST系統同一時間測得同一目標的高精度測向線,通過計算各測向線在空間中的交點來確定目標的位置。這里以雙機為例,長機、僚機和目標的二維空間位置如圖2所示。
圖2 雙機測向交叉定位原理Fig.2 Triangalation location of two planes
長機坐標為(x1,y1),僚機坐標為(x2,y2),兩機所測得同一目標T(xT,yT)的方位角分別為θ1、θ2。由圖中的幾何關系可得:
(1)
O1s的長度可表示為:
(2)
目標坐標為:
(3)
2定位幾何模型及誤差
2.1基線距離已知,兩機坐標未知
如圖3所示,O1、O2為長機和僚機的位置O1O2=d,已知,O2′為O2在xO1y面內的投影,S′為目標在xO1y面內的投影,S″為目標在僚機坐標平面內的投影。目標S坐標為(xT、yT、zT)。
L1、L2為目標到兩機的斜距,α1、α2分別是兩機測得目標的方位角,β1、β2分別為兩機測得目標的俯仰角。α3、β3分別是僚機相對于長機的方位角和俯仰角。
圖3 雙機定位示意圖(一)Fig.3 Two planes location sheme(one)
根據圖3中幾何關系可得目標的坐標為:
(4)
2.2兩機坐標已知,基線距離未知

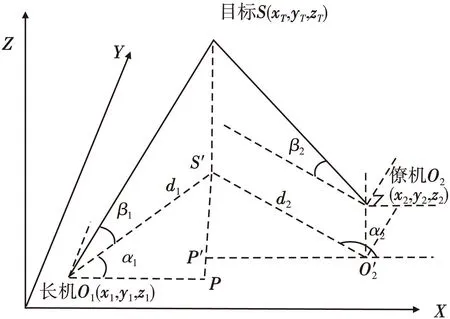
圖4 雙機定位示意圖(二)Fig.4 Two plane location sheme(two)
則由圖4中的幾何關系可得目標的坐標為:
(5)

2.3定位誤差公式推導
從統計學的角度看,由于載機測向系統的隨機噪聲產生測量誤差,即實際測量過程中得到的方位與俯仰角αi、βi(i=1,2),存在誤差,這個測量誤差引起定位誤差,定位點在真實位置周圍就會隨機散布。文獻[10—11]中提出,幾何稀釋精度是衡量定位精度的常見指標。
“定位精度的幾何稀釋”即GDOP,用于描述三維分布下的定位誤差,定義如下:
(6)
其中,σx、σy、σz為三維定位的均方差。
利用上述的描述,可對長機、僚機測向交叉定位誤差進行分析。為了方便分析,假設:長機、僚機所配置傳感器的精度指標相同;不考慮慣導誤差;載機各誤差之間不相關。
模型一:基線距離已知,兩機坐標未知。
對式(4)求偏導,
(7)
式中,
式(7)可以寫成:
dX=HdZ
(8)
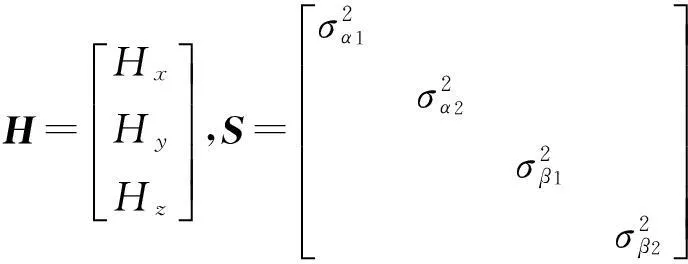
式中,H=[Hx,Hy,Hz]T

P為定位誤差的協方差,則有:
(9)
可得x、y、z軸的定位精度:
GDOP表示為:
(10)
模型二:兩機坐標已知,距離未知。
對式(5)求偏導,同樣可得目標定位誤差的方差,并求得雙機在三維幾何分布下的定位誤差GDOP。
P為定位誤差的協方差,則有:

(11)
3仿真分析
雙機進行超視距協同空戰時,當完成近距引導,開始接敵實施攻擊的準備過程中,對目標定位精度的高低直接影響可控武器的脫靶量大小。因此,有必要對兩種定位模型的精度進行仿真解算,得到每個模型的精度以及模型精度的影響因素,從而對比模型的特性,給出模型的適用條件。
定義長機所在的水平面為目標高度的基準面。以下結論均是在不同條件下對每一模型的GDOP進行1 000次蒙特卡洛仿真得到的。
對于模型一,假設長、僚機間距離為60 km,且在同一高度,距離測離誤差為σd2=0.2 m,方位角與俯仰角測量誤差的均方差為σα1=σα2=σα3=σα,σβ1=σβ2=σβ3=σβ,且σα=σβ,目標在x,y軸的變化是[-100,100]、[-100,100],單位為km。圖5繪制了測角誤差分別為σα2=0.1 mrad、σα2=0.9 mrad、σα2=1 mrad的定位精度分布圖。從圖中可以看出:隨著測角誤差的增大,定位精度明顯下降,測角誤差對定位精度產生了主要影響。
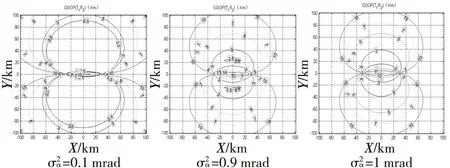
圖5 測角誤差影響Fig.5 Angle measuring error in fluence
圖6繪制了測角精度同為σα2=0.9 mrad,距離誤差σd2=0.2 m兩機距離分別為d=20 km、40 km、60 km的定位精度分布圖。從圖中可以看出:隨著兩機距離的增大,定位精度明顯上升,兩機距離對定位精度產生了主要影響。
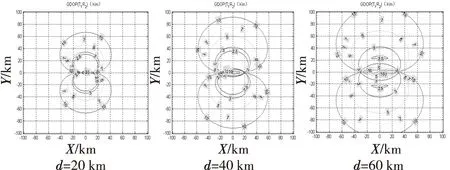
圖6 兩機距離影響Fig.6 Two plane distance in fluence
圖7繪制了測角精度同為σα2=0.9 mrad,距離誤差σd2=0.2 m,兩機距離分別為d=40 km,目標高度分別為h=100 m、1 000 m、10 000 m的定位精度分布圖。從圖中可以看出:目標高度不是影響定位精度的主要因素。
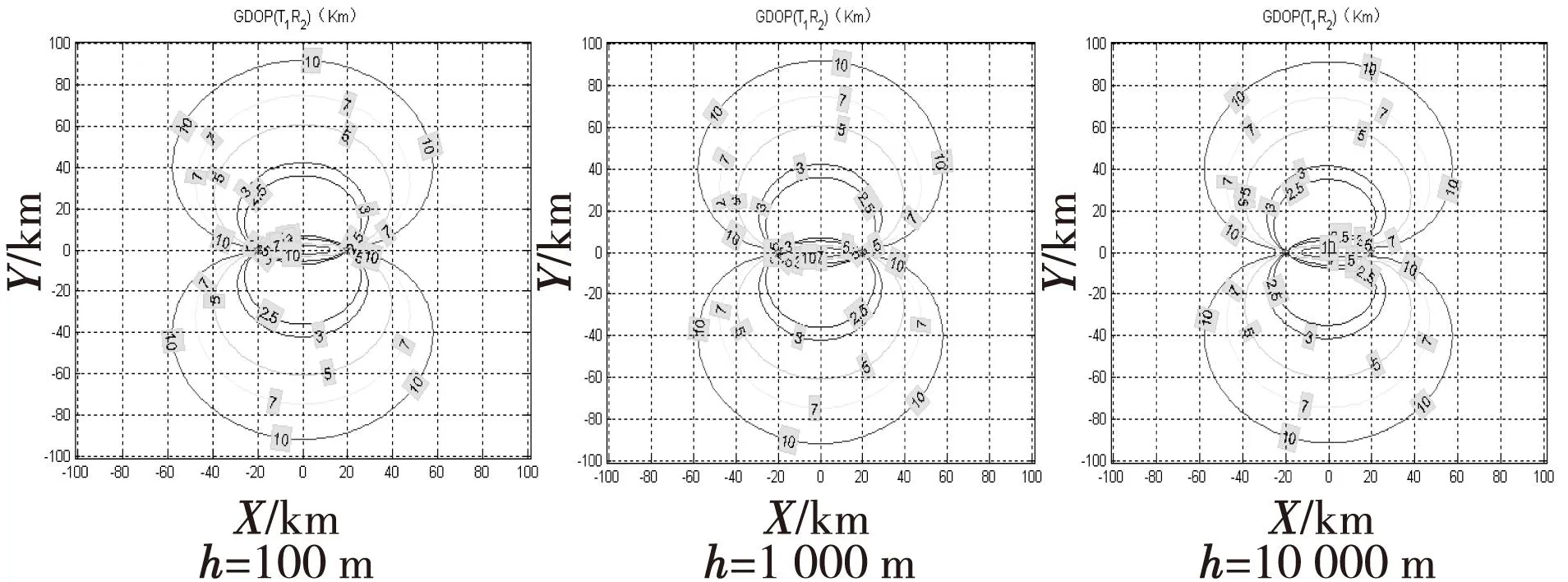
圖7 目標高度影響Fig.7 Target height in fluence
圖8繪制了測角精度同為σα2=0.9 mrad,兩機距離分別為d=40 km,目標高度分別為h=100 m,兩機距離誤差σd2=0.2 m、σd2=0.02 m、σd2=0.002 m的定位精度分布圖。從圖中可以看出:距離誤差不是影響定位精度的主要因素。
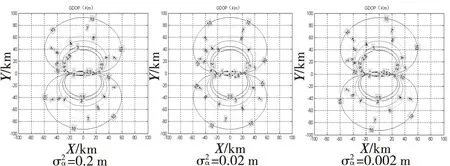
圖8 距離誤差影響Fig.8 Distance error in fluence
對于模型二,給定與模型一相同的參數可以得到在不同的條件下類似的結果,此處不再贅述。
在圖9中可知,當目標高度位于1 km時,模型一的定位精度優于模型二,模型二在長機區域誤差梯度加大,在僚機區域算法失效。對于模型一如圖7目標高度位于10 km時,僚機區域的誤差梯度加大。
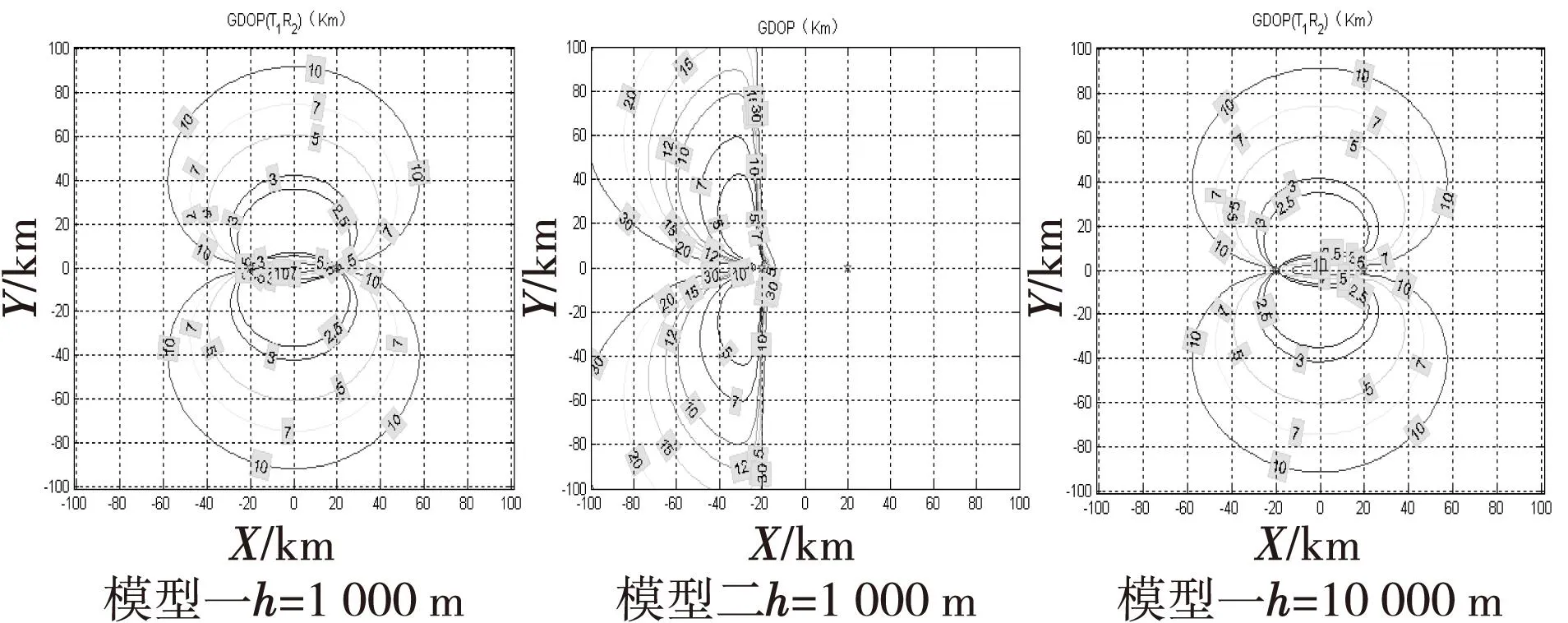
圖9 兩種模型的GDOP分布圖Fig.9 GDOP of two models
在超視距空戰戰場信息不完全可知的條件下,應首先確保準確的測量出基線距離,選取模型一完成作戰任務。
從兩種模型的GDOP分布圖還可以看出,GDOP等值線從基線向外擴展,定位精度開始從大到小,到達載機中垂線位置時,又由小到大。在基線的延長線上,定位精度最差。說明當長機與僚機與目標構成一個等腰三角形時,定位精度最高。
進一步分析長機與僚機與目標構成怎樣的三角形形狀,才能使定位的誤差達到最優。對式(11)求導:
又因為α1=α2,可求得:α1≈35°,即目標在長機與僚機中垂線上,且與兩機的方位角約為35°時,定位精度最高,該結論與文獻[12]中的結論相符。
4結論
本文提出了兩種基于測向交叉定位原理的IRST雙機被動定位幾何模型,模型一的基線距離已知,兩機坐標未知;模型二的兩機坐標已知,基線距離未知;并針對載機定位誤差進行了分析和仿真,得到了兩種模型測向交叉定位的絕對誤差GDOP仿真圖。通過仿真初步得出結論:在滿足多機間大容量實時傳輸和隱蔽性要求的基礎上,模型二的計算速度明顯優于模型一,但在目標高度大于1km時,模型二失效;長機與僚機的位置構成一個等腰三角形且兩載機的交角為110°時,定位的精度最高;測角誤差減小,兩機距離增大時,定位精度也會提高很快。下一步需進一步理論分析模型二失效的原因以及誤差與精度的定量關系。
參考文獻:
[1]孫仲康,郭福成,馮道旺.單站無源定位跟蹤技術[M].北京:國防工業出版社,2008.
[2]梁捷,謝小方,曹建,等.機載多點測向交叉定位的最優機方向研究[J].電光與控制,2010,17(10):14-17.
[3]張平,方洋旺,朱劍輝,等.基于UKF算法的雙機協同無源跟蹤[J].電光與控制,2012,19(4):26-30.
[4]陳鑫,王海晏,徐強,等.基于激光通信鏈路的機載IRST被動定位方法[J].電光與控制,2013,20(6):40-44.
[5]于振紅,朱振福,江榮熙,等.基于雙門濾波的紅外點目標檢測方法[J].系統工程與電子技術,2004,26(9):1195-1197.
[6]吳盤龍,陳風,王寶寶.基于魯棒H∞濾波的多站角度測量機動目標被動跟蹤[J].系統工程與電子技術,2011,33(1):17-20.
[7]劉軍,曾文鋒,江恒,等.雙站測向交叉定位精度分析[J].火力與指揮控制,2010,35(S):12-14.
[8]徐強,王海晏,楊海燕,等.激光數據鏈路與IRST信息融合方法研究[J].應用光學,2013,34(2):349-354.
[9]徐強,王海晏,楊海燕,等.雙機IRST配準融合圖像的弱小目標檢測方法[J].應用光學,2013,34(6):1025-1029.
[10]WANGBC,HEY,WANGGH.RelatedIssuesinDual-sensorBearing-onlyLocalization[J].Opto-ElectronicEngineering,2012,39(1):80-87.
[11]武宜川,潘冠華,羅雙喜.空基平臺無源定位精度分析[J].指揮控制與仿真,2010,32(2):89-92.
[12]王本才,何友,王國宏,等.雙站無源定位最佳配置分析[J].火力與指揮控制,2012,37(2):120-123.
Two-fighter Passive Location Model for Infrared Search and Track
HAO Zhenxing1,LUO Jixun1,HU Zhaohui1,LI Wenchao2
(1.Engineering College of Aeronautics and Astronautics, Air Force Engineering University,Xi’an 710038, China;2.Unit 95896 of PLA, Cangzhou 061736, China)
Abstract:For the problem of low accuracy, settlement calculation speed and large capacity information real-time transmission of airborne infrared search and track (IRST) among multiple machine problem, two application laser data link transmission information of IRST passive positioning of two models were put forward. The models were built on the basis of the principle of direction of arrival location, a baseline distance was known and aircraft coordinates unknown. Simulation results showed that the measuring angle error was reduced, the positioning accuracy was improved when the two machine distance increased; the computing speed of model two was better than model one, but, when the target height was greater than 1 km, model two failed; when two aircrafts and target forming a isosceles triangle and the two aircraft crossing angle was 110 °, the highest accuracy was gained.
Key words:laser link; airborne infrared search and track (IRST); directing of arrival (DOA) location; geometrical dilution of precision (GDOP)
中圖分類號:V271.4
文獻標志碼:A
文章編號:1008-1194(2016)01-0028-05
作者簡介:郝振興(1991—),男,河北唐山人,碩士研究生,研究方向:航空指揮控制與戰術導引。E-mail:879070141@qq.com。
*收稿日期:2015-08-21