BDS支持下的航天器著陸回收指揮平臺
2016-04-07 08:41:19劉燦由郭洪建
導航定位學報 2016年1期
劉燦由,張 威,汪 波,黃 明,郭洪建
(1.西安衛星測控中心 宇航動力學國家重點實驗室,西安 710043;2.測繪信息技術總站,西安 710054)
?
BDS支持下的航天器著陸回收指揮平臺
劉燦由1,張威2,汪波1,黃明1,郭洪建1
(1.西安衛星測控中心 宇航動力學國家重點實驗室,西安710043;2.測繪信息技術總站,西安710054)
摘要:針對航天器著陸返回后需在大范圍區域內進行快速搜救的問題,提出了BDS支持下的航天器著陸回收指揮平臺建設方案。該方案利用BDS的導航定位功能,實現對搜索載體的快速定位;利用BDS短報文通信功能,完成各級指揮平臺對所屬用戶的輔助指揮,實現各搜救力量之間的信息傳輸,完成著陸區航天器態勢數據向指揮中心三維GIS系統的傳遞,并提出了將基于地理信息的空間分析與人的經驗相結合實現最優越野路徑的規劃方法,文中分別闡述方法的原理及步驟,結果表明新方法使得著陸回收指揮平臺形成全方位的立體快速搜救能力,滿足實際工程需求。
關鍵詞:BDS;著陸返回;搜救指揮;路徑規劃;人工智能;地毯式搜索
0引言
航天器回收著陸技術是航天技術的重要組成部分,它是隨著火箭、導彈、空間技術發展而發展起來,并得到廣泛應用的一門綜合性應用技術,其涉及的范圍很廣,而航天器著陸返回最后的搜救工作是整個航天任務過程成敗的關鍵[1-2]。對于載人航天器的搜救,雖然著陸區域范圍較小,但考慮到宇航員的安全,要求以最短時間集結空中與地面搜救分隊,對時間與應急路徑規劃方面提出了很高要求;對于非載人航天器的搜救由于散射范圍較大,對著陸區域的大范圍地形路徑規劃提出了很大要求[3-4]。總之,根據航天器多種傳感器信息及時、快速找到航天器,是目前搜救工作的難點。為此,本文提出了基于北斗衛星導航系統(BeiDou navigation satellite system,BDS)的航天器著陸搜救指揮平臺,它集成了多種類型數據包括影像數據、地形數據、路網數據等,并利用BDS進行導航定位與通信,以實現高效的路徑規劃算法,快速、準確到達航天器的落地點,實現整個搜救工作的智能化。
1平臺結構設計
整個航天器著陸回收指揮平臺運用三維地理信息系統直觀地反映主著陸場地形狀況,并根據實時信息提供指揮決策與搜索救援方案,它主要由兩部分組成:地面指揮車地理信息系統(geographic information system,GIS)服務端、地面搜救車與空中直升機的GIS客戶端。其中,指揮車GIS系統是以統籌全局為目的,配置在主著落場指揮車上提供指揮決策與搜索救援方案的可視化輔助決策系統。該GIS系統核心功能主要有三個,1)實時展示遙測信息,包括彈道、特征點參數、航天器高度-時間表;2)搜集地面分隊、空中分隊的方位、位置信息,統籌地面與空中搜救任務;3)快速導航,獲取到目標位置后,系統自動規劃路徑,快速導航到目標所在位置。地面搜救車與空中直升機的GIS系統主要用于航天器實時位置顯示、三維地形模擬與路徑導航,并向指揮車實時發送位置信息。
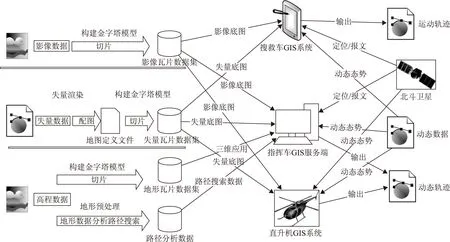
圖1 基于BDS的航天器著陸回收指揮平臺結構
如圖1所示,航天器著陸回收指揮平臺所處理的數據主要包含四種類型影像數據、矢量數據、高程數據以及動態數據。其中,原始影像數據經過切片工具預先切片形成瓦片數據集,瓦片數據集在搜救車的平板上、指揮車的計算機上以及直升機上作為地圖數據進行顯示;基礎矢量數據包含行政區劃邊界、道路、水系、地名點、高程點或者等高線數據,這些數據通過要素分層配圖后存儲為文件數據源,基礎矢量數據在搜救車、直升機或者指揮車上疊加到影像數據上顯示,另外為提高大比例尺的矢量數據實時顯示速度,也可將大比例矢量數據切片為矢量瓦片數據集后疊加顯示;高程數據(digital elevation model,DEM)通過預處理形成基于地形的路徑搜索網絡數據,同時DEM通過預切片形成地形瓦片數據集,此地形瓦片數據集是GIS系統實現地形三維模擬的數據基礎。另外,為實現回收區各類態勢信息向指揮中心傳遞,平臺還需要處理一些動態數據信息,例如受環境影響而變化的地理區域、河流、道路等矢量數據,各搜救車、指揮車、直升機的位置、軌跡,指揮車發送的任務內容等,需要通過BDS短報文的形式實現信息傳輸,同時指揮車還需要能夠接收航天器的遙測信息。直升機在接收到航天器位置信息后,通過GIS系統的目標方位指引,便能很快明確航向,迅速飛向目標,但對于航天器著陸后的處理工作,還需要用到大型的裝備,這就需要地面分隊通過運輸才能抵達,如何根據運輸車的行駛條件,找到最佳的搜救路徑是該平臺的一個關鍵,以下將對此問題進行深入探討。
2關鍵技術算法
各移動載體的BDS定位信息通過BDS短報文的形式傳送到指揮車,指揮車的GIS系統需要融合各類數據,并實時計算出各搜救車的最佳搜救路徑,然后將搜救方案下發給各搜救車。為實現路徑最優規劃,本文提出了基于多源數據融合的路徑搜索算法,首先需要分析各類數據類型與用途,再根據不同的場景狀況采用不同的路徑規劃方法實現最優路徑規劃。
2.1路徑規劃數據
本文將路徑規劃需要使用的數據細化為以下幾種類型,具體包括影像數據、高程數據、基礎矢量數據、路網數據以及不可達或危險區域。
影像數據,是指衛星或者航拍的遙感數據,影像數據應該使用盡可能新的數據,其用途是在GIS系統中提供直觀的紋理層,以方便搜索人員更準確的判斷周圍的情況。高程數據的用途存在兩種,一種為GIS系統提供三維地形顯示,三維場景顯示不需要很高精度的DEM,實際使用可以采樣到10~30 m精度,第二種為路徑規劃搜索可行進路線所使用,此種場景下數據格網精度一般要求在1~5 m之間,精度越高路徑規劃的可靠性越高,通過地形算法計算出某區域內從起點到目標點適合行駛的路線。基礎矢量數據包括水系、境界、居民地、道路等基礎數據,基礎矢量數據主要用于GIS使用過程中能夠更方便的參照定位。
路網數據是指已經規劃、建設的道路,主要來源于基礎矢量數據或事先在著陸場區采集的數據。對于路網數據中的道路和可行進路線,不僅要記錄路線定位數據,而且要記錄路線的合適級別,如(非常容易行駛,比較容易行駛、晴天可行駛、雨雪天氣不可行駛等)。路網數據用于路徑搜索時優先使用的路徑。不可達或危險的區域數據是指通過現場勘查人員在場區勘察采集到的車輛不可達的區域(如山區、丘陵),危險區域(如沙地、沼澤)等,也可以通過影像數據由專業人員識別不可達或危險的區域,或者通過高程數據使用空間分析算法計算出不可達的區域。對于不可達或危險的區域的數據采集應盡量采用多種方式,單一采集方式有可能不夠完全、不夠準確。不可達或危險的區域數據并不僅僅是區域數據,同時應該包含一定的環境對區域危險程度的影響,如雨雪天氣下為危險區域,但是晴朗天氣下則不危險等。不可達或危險的數據用于在路徑規劃過程中自動實現避開危險區域或者提醒搜索人員注意危險區域。
2.2路徑規劃方法
基于BDS的航天器著陸回收指揮平臺是通過短報文進行動態數據的發收,并通過BDS與遙測數據確認航天器坐標進行路徑規劃,根據不同的場景狀況分為以下三種類型:
(1)理想狀態(有路網與目的地)
航天器著陸點位于道路網可以到達的區域或者附近,此路徑規劃方法可以由通用的最短路徑分析功能完成。
(2)非理想狀況(無路網,但有目的地)
航天器落地點已知,但是著陸區域內的路網狀況未知,需要在常規路網分析的基礎之上從高精度DEM數據分析得出最優的越野路線。
(3)特殊狀況(無路網且無目的地)
當航天器著陸過程中,其信號發射器出現故障,不能發射航天器位置信號,即不知道著陸場區的路網情況,也不知道航天器實際位置這種情況出現時,只能進行地毯式搜索。搜救直升機先以最快的速度抵達預計落地點進行搜尋,地面搜救分隊根據可能的著陸區域展開地毯式搜索。
2.2.1道路網數據可以連通目標位置
目標位置可能位于道路網可以到達的區域或者附近,此路徑規劃方法可以由通用的路徑分析功能完成。對于存在道路網數據、目標位置已知的情況下通過常規道路網分析實現,需要注意的是分析過程需要根據環境的惡劣程度預先剔除不適合行進的路徑段,路徑分析出來之后應該結合危險避讓區域進行疊加分析,提醒搜索人員注意危險區域,必要時考慮危險避讓區域與道路網的重疊,剔除重疊的路徑段再進行分析,整個流程如圖2所示。
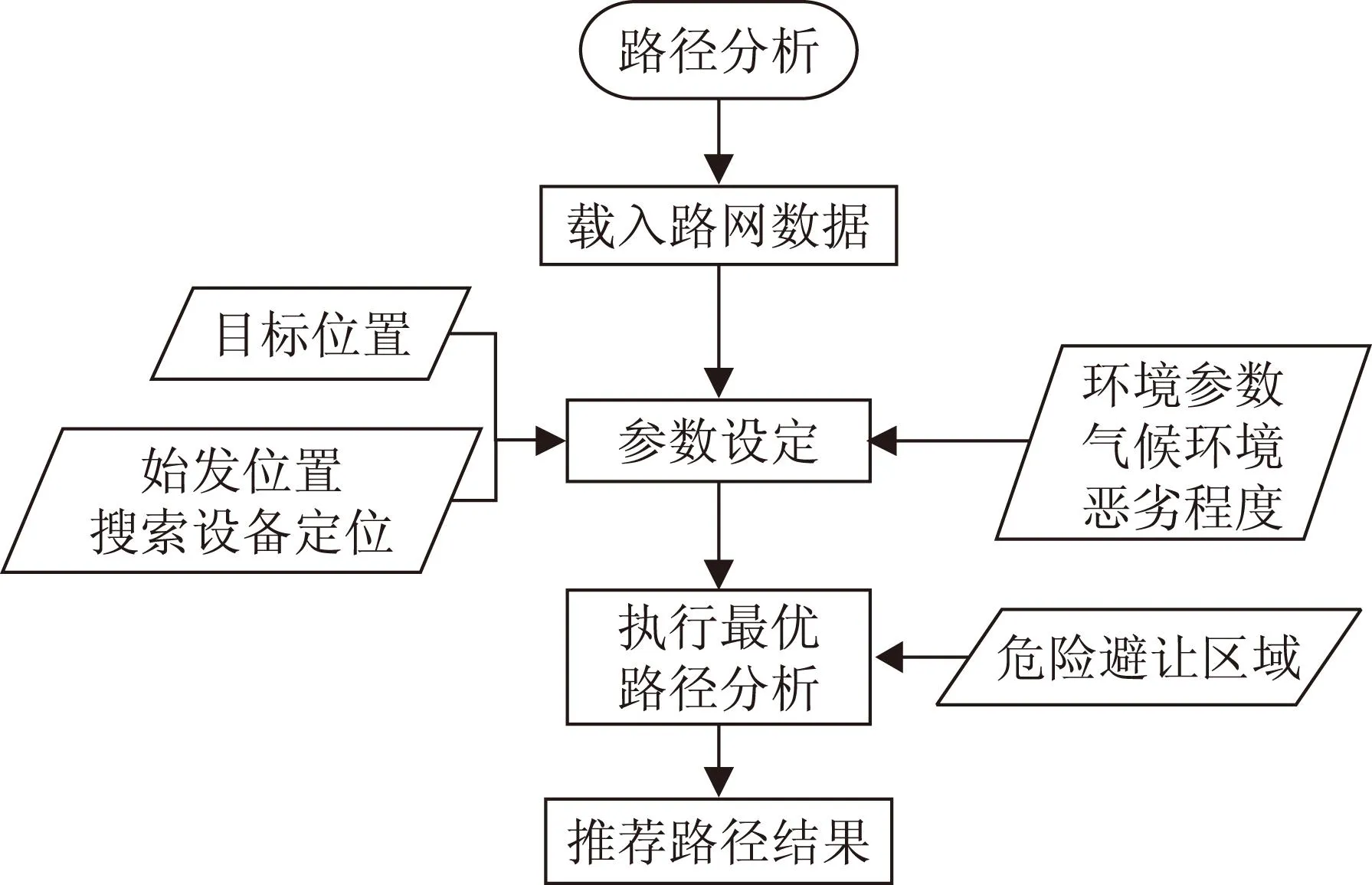
圖2 路徑規劃流程
2.2.2無道路網或道路網不可到達目標位置
在沒有道路網或者道路網不全,目標位置位于道路網之外的情況需要在常規路網分析的基礎之上從高精度DEM數據分析得出行徑路線。具體過程如下:
(1)根據DEM計算理論適合行進的區域
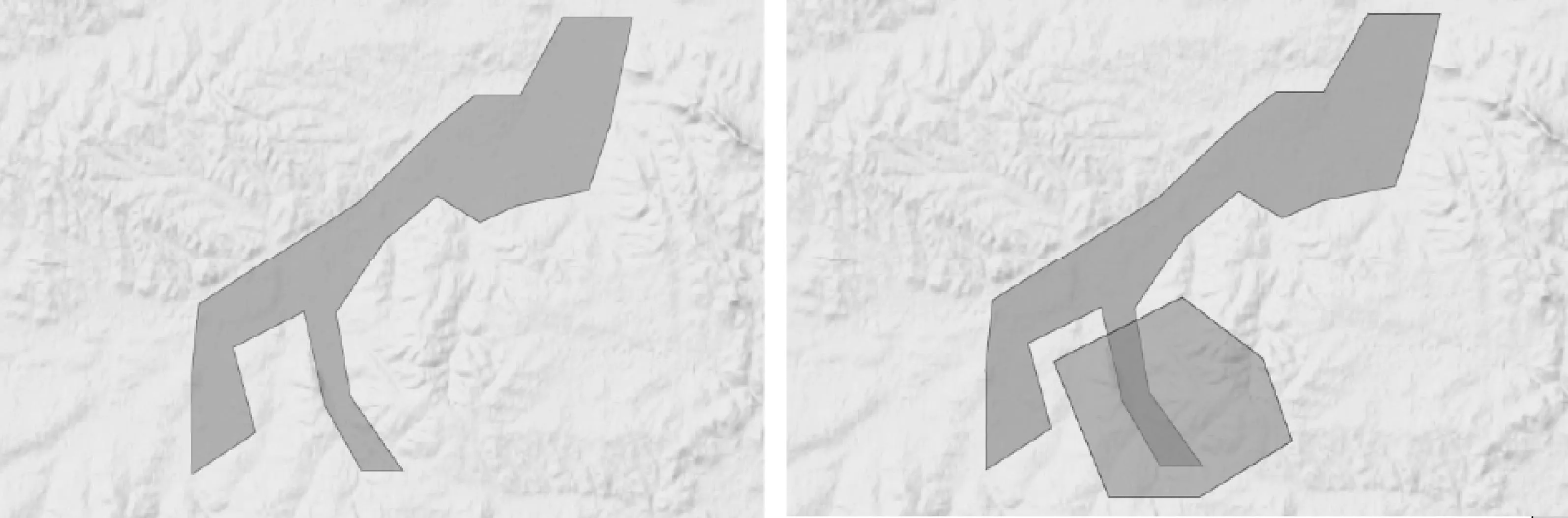
圖3 路徑規劃示意圖(左圖表示可通行區域,右圖疊加了不可達或危險區域)
此過程不需要在搜索現場實時進行,可以事先計算保存結果既可。具體方法是通過對高精度DEM數據采用空間分析算法[5],計算出整個DEM地形范圍內所有適合行進的區域范圍,所謂適合行進是根據搜索特種車輛的性能要求,地勢適合搜索車輛行駛的區域。理論適合行駛區域可以以矢量數據面的形式存儲起來,如圖3所示。
(2)疊加不可達或危險區域,形成最可能行進區域
理論可行進區域與危險、不可及區域在搜索現場進行疊加分析,這主要是因為危險、不可及區域和現場的氣候環境相關,可以根據氣候環境來確定哪些區域為不可及、危險區域,通過和理論可行進區域疊加分析,即可從理論可行進區域排除危險區域形成最可能行進的區域,如圖3所示。
(3)形成路徑搜索走廊
路徑搜索走廊是路徑搜索結果可能會覆蓋的一片區域,路徑搜索最優的搜索走廊就是從始發點到目標點之間的一段直線進行緩沖區分析后所得到的區域。
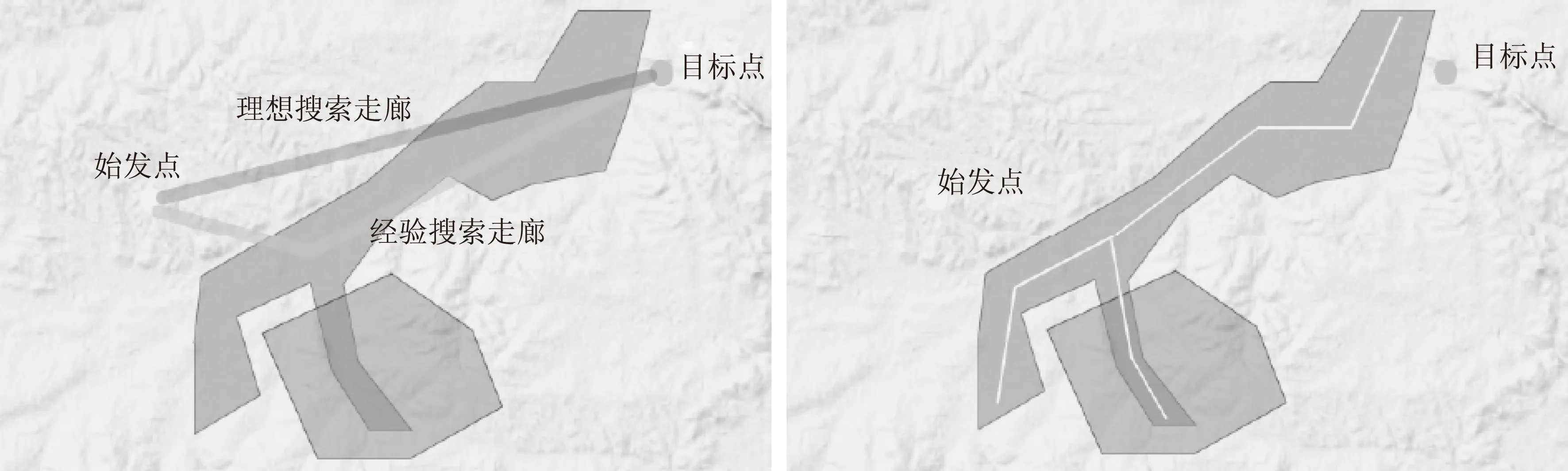
圖4 考慮人工干預的路徑規劃示意圖
搜索走廊可以由計算自動生成(即始發點到目標點的直線緩沖區),也可以由有經驗的搜索人員在地圖上標繪建議路徑定義為搜索走廊,如圖4所示。
(4)分析參與路徑搜索的可行進區域
通過確定的搜索走廊和最可能的行進區域進行相交查詢可以確定哪些可行進區域參與到路徑規劃過程中。
(5)分析可行進區域最優越野路線生成行進路線網
通過對參與路徑規劃的可行進區域計算出行進時間最短的越野路線,即可得出可行進路線網,如圖4所示。
(6)補全破碎的進行路線網
通過最優越野路線分析出來的路線網可能無法構成完整的通達網絡,此時需要對各拓撲分離的路線網進行補全[6]。具體方法可以對所有破碎的最優越野路線進行端點間的距離分析,在距離足夠近的情況下進行連通,如圖5所示。
程序自動補全路線網并不一定都是正確的,通過醒目的標示,程序自動拓撲補全的路線可以借鑒人工勢場法[7-8],通過與地形、影像數據結合來確定程序補全的路線是否合理,或者可以由人工來手動補全一些路線。
(7)對生成的路網載入到路網分析流程中規劃出搜索路線,如圖5所示。
2.2.3地毯式搜索越野路徑規劃
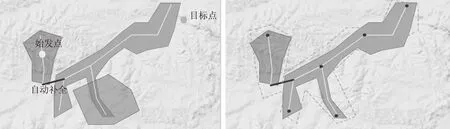
圖5 規劃路徑的自動拓撲示意圖
地毯式搜索路徑規劃的方法可以認為是多次路徑規劃的過程,與目標位置明確的路徑規劃不同,地毯式搜索的目標不是到達路徑規劃終點[9],而是通過多次路徑規劃形成的搜索走廊進行區域合并,最終實現對整個可能著陸區域的全覆蓋。
地毯式搜索路徑規劃的具體過程如下:
(1)通過人工標繪圈出可疑搜索范圍;
(2)通過可疑搜索范圍和可行進區域相交查詢,得出參與規劃可行進區域;
(3)計算可行進區域的最優越野路線構成路線網;
(4)補全路線網;
(5)定義搜索設備車輛可覆蓋的觀察范圍(如附近1 km);
(6)定義地毯式搜索的可能起點;
(7)程序可以通過路網的端點自動生成地毯式搜索的起點,也可以人工添加地毯式搜索的起點;
(8)通過對所有可能的起點排列組合形成多次路徑規劃,每次路徑規劃根據觀察范圍形成搜索走廊的緩沖區。
通過對所有的走廊排列組合計算可行的搜索路線要求達到這樣的條件[10]:
(1)所使用的搜索走廊數量最少,
(2)搜索走廊間的重疊區域最小
(3)所有搜索走廊覆蓋的區域最大。
3平臺實驗
基于BDS的航天器著陸回收指揮平臺包含三大核心功能,包括:航天器態勢信息的實時展示;地面分隊與空中分隊位置信息搜集,以及相互間的BDS通信;考慮人工干預的最優越野路徑規劃,統籌地面空中的搜救力量,實現對航天器的立體快速搜救。
3.1航天器實時信息顯示
當指揮車接收到航天器的遙測數據后,系統右上角狀態欄遙測燈變亮,單擊遙測按鈕,系統界面上顯示實時的遙測信息,主要有實時彈道軌跡、高度-時間表與信號通道,以及屏幕上方的詳細信息,如經緯度、高度、預報落點等。
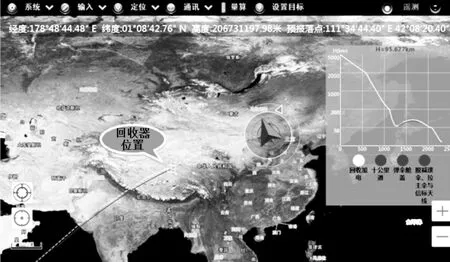
圖6 航天器信息顯示
3.2各搜救隊間的位置關系
以指揮車為中心,可實時看到所有搜救車、直升機到它的距離、方位,其中距離以文字形式展示,方位信息用搜救隊與指揮車的連線表示。

圖7 搜救隊與指揮車的距離、方位信息
3.3考慮人工干預的越野路徑規劃
航天器著陸回收指揮平臺另一個核心功能是考慮人工干預的越野路徑規劃功能。當目標位置確定后,并可人工干預輸入中間點坐標或在圖上直接點選位置后,系統將自動進行路徑規劃。指揮車GIS系統導航獲取目標位置的方式有多種包括遙測自動獲取、BDS短報文獲取、手動輸入目標經緯度、以及定向儀角度交會位置。如圖8所示當接收到BDS短報文的航天器落點信息時,系統將其自動設置為目標位置,并開始規劃路線。
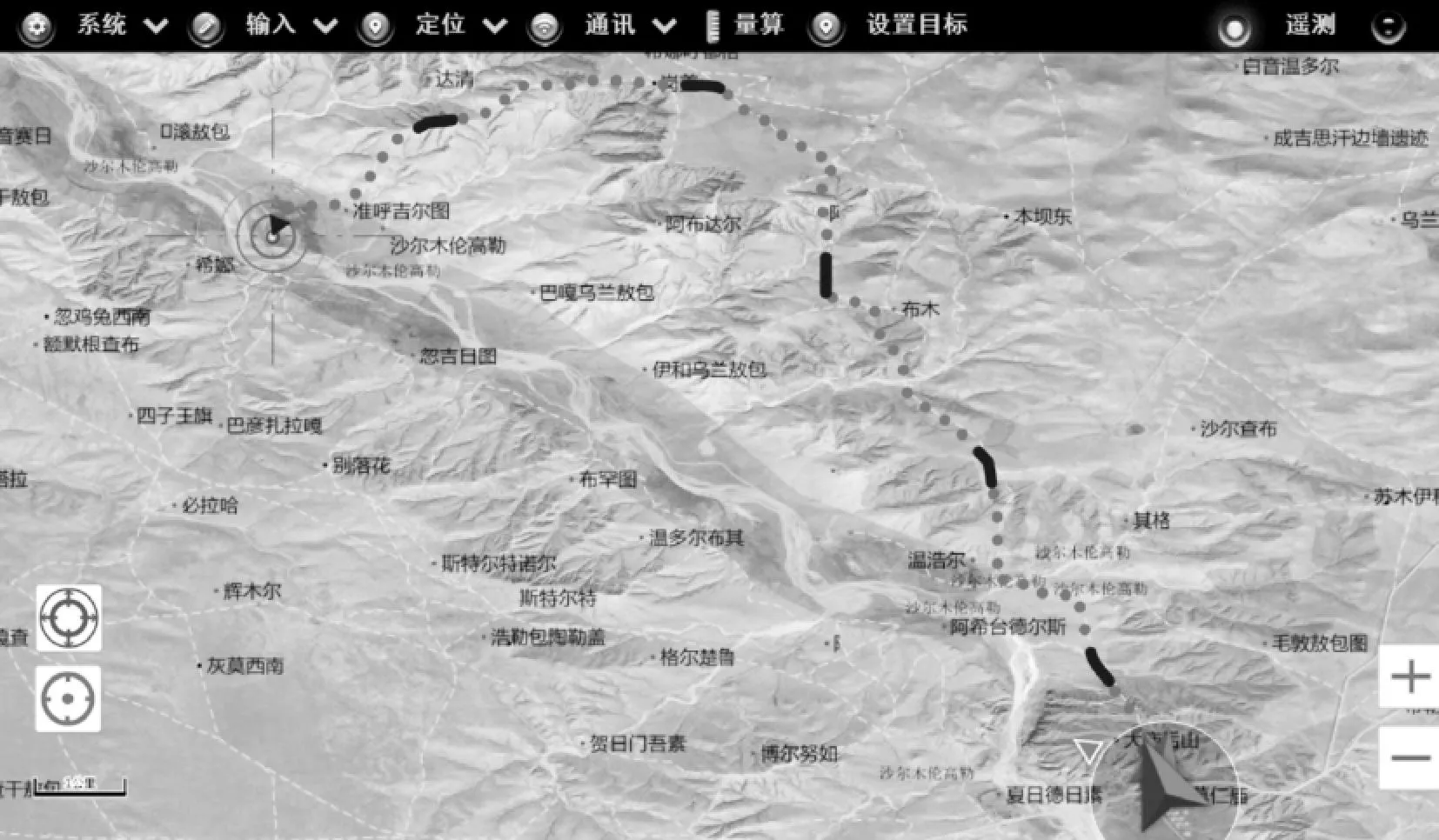
圖8 通過BDS短報文獲取定位信息并自動導航
4結束語
隨著后續載人空間站的常規化,航天器的著陸回收工作將越來越頻繁,對航天器的快速搜救工作將提出更高的要求,本文提出的基于BDS的航天器著陸回收指揮平臺,對搜救力量的整合與實況信息的互聯互通提供了一個基礎地理信息平臺,并能夠將基于地理數據的空間分析與人為的經驗相結合,根據不同的場景狀況為搜救隊快速計算出最優搜救路徑,但對于不同搜救力量的協同搜索路徑規劃還有待于進一步研究。
參考文獻
[1]盧波.國外深空探測再入返回技術發展分析[J].國際太空,2014(11):11-17.
[2]卞韓城,黃寧,袁亞軍,等.國外載人航天器返回著陸分析與啟示[J].載人航天,2011(6):1-7.
[3]閔學龍,潘騰,郭海林.月球返回再入著陸場位置選擇限定因素分析[J].航天器工程,2011,20(2):25-29.
[4]葛亞華,卞韓城,李振海,等.空間站工程著陸場航天員應急搜救體系建設研究[J].載人航天,2013(4):23-30.
[5]林篤斌,李欣.基于DEM格網的改進型A*路徑搜索算法[J].計算機工程與設計,2011,32(10):3414-3418.
[6]彭松,賈陽.月球車全局路徑規劃中的A*算法改進[J].航天器工程,2010,19(4):80-85.
[7]況菲,王耀南,張輝.動態環境下基于改進人工勢場的機器人實時路徑規劃仿真研究[J].計算機應用,2005,25(10):2415-2417.
[8]于振中,閆繼宏,趙杰,等.改進人工勢場法的移動機器人路徑規劃[J].哈爾濱工業大學學報,2011,43(1):50-55.
[9]蒲興成,孫凱.一種改進的自適應蟻群算法及其應用研究[J].重慶郵電大學學報(自然科學版),2011,23(3):331-335.
[10]吳天羿,許繼恒,劉建永,等.多策略蟻群算法求解越野路徑規劃[J].解放軍理工大學學報(自然科學版),2014,15(2):158-164.
Spacecraft Landing Recovery Command Platform based on BDS
LIUCanyou1,ZHANGWei2,WANGBo1,HUANGMing1,GUOHongjian1
(1.Xi’an Satellite Control Center,State Key Laboratory of Astronautic Dynamics,Xi’an 710043,China;2.Technical Division of Surveying and Mapping,Xi’an 710054,China)
Abstract:For the issues of rapidly searching and rescuing in a wide range after spacecraft landing,the construction scheme of the spacecraft landing recovery command platform based on the support of BDS is proposed.The scheme realizes the rapid positioning of the search vectors by using BDS navigation and positioning function;it also achieves auxiliary command at all levels of command platform,transmits information between the search and rescue forces,transfers landing spacecraft state data to the command center of 3D GIS by using BDS short message communication function.This paper presents method of combining geographic information spatial analysis and experience to achieve best off-road path,and explains in detail the principle of the method and steps.The results show that the new method makes landing recovery command platform to form a full range of three-dimensional rapid search and rescue capabilities,and meet the needs of practical engineering.
Key words:BDS;landing recovery;rescue command;path planning;artificial intelligence;blanket search
中圖分類號:P228
文獻標識碼:A
文章編號:2095-4999(2016)-01-0010-06
作者簡介:第一劉燦由(1985—),男,福建省泉州市人,工程師,博士,現主要從事航天測控等科研和應用方面工作。
收稿日期:2015-05-18
引文格式:劉燦由,張威,汪波,等.BDS支持下的航天器著陸回收指揮平臺[J].導航定位學報,2016,4(1):10-15.(LIU Canyou,ZHANG Wei,WANG Bo,et al.Spacecraft Landing Recovery Command Platform based on BDS[J].Journal of Navigation and Positioning,2016,4(1):10-15.)DOI:10.16547/j.cnki.10-1096.20160103.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28