全球廣義定位報告系統星座配置分析
2016-03-30 08:27:32北京衛星導航中心薛峰任暉汪淼
衛星應用 2016年2期
● 文| 北京衛星導航中心 薛峰 任暉 汪淼
?
全球廣義定位報告系統星座配置分析
● 文| 北京衛星導航中心 薛峰 任暉 汪淼

摘要:隨著我國導航系統的快速發展,全球范圍內定位報告、短報文通信的需求進一步擴大。本文針對全球廣義定位報告系統星座設計方案,通過對不同軌道平面、衛星數量信號覆蓋情況進行仿真,進而得出相關結論。結果表明,廣義定位報告系統采用3顆靜止軌道衛星、3顆傾斜軌道衛星和24顆合理配置的中圓軌道衛星,可以在全球范圍內提供45°以上仰角的位置報告服務,可用性接近99%。
關鍵詞:廣義定位報告系統 觀測仰角 星座配置
一、概述
北斗衛星導航系統(Beidou Navigation Satellite System,BDS)是真正意義上的導航定位報告系統。該系統采用衛星無線電導航定位報告體制(Radio Determination Satellite System,RDSS),即基于衛星無線電測量實現衛星無線電導航、定位報告和短報文通信等業務。與“GPS定位+銥星全球移動通信”相比,具有性價比高,位置報告簡單、自主、安全、快速,雙業務融合等諸多優勢[1]。傳統定位報告業務的空間段由地球靜止軌道衛星( GEO )組成,廣義定位報告業務的空間段可以是任意衛星,即非GEO(NGEO)組成,幾何原理均為三球交匯位置確定原理,傳統的定位報告業務是廣義定位報告業務的子集。
本文扼要論述了RDSS的理論基礎,并針對未來全球廣義定位報告業務衛星配置方案進行仿真分析,提出滿足45°仰角要求的配置方案。
二、 RDSS定位報告原理
1.傳統定位報告原理
傳統雙星定位報告由兩顆定位報告衛星(RDSS)、用戶設備(UE)、中心處理系統(MCC)組成的閉環測量鏈路及通信信道實現用戶定位及位置報告[1]。雙星定位報告原理如圖1所示,兩顆衛星均為無線電定位(RDSS)衛星,RDSS衛星的有效載荷為出站、入站變頻轉發器。

圖1 雙星定位報告原理
工作過程具體如下:
1)MCC以本地北斗時(BDT)同步產生出站詢問信號;
2)RDSS衛星連續轉發MCC的問詢和測量信號;
3)UE測量兩顆RDSS衛星信號的時差值,在RDSS衛星的指定時刻發射入站信號,并將時差測量值傳回MCC;
4)MCC根據用戶設備的入站信號,獲得MCC→RDSS衛星→UE的雙向距離和兩顆RDSS衛星信號的時差值;
5)利用雙向距離完成用戶雙向定時,確定用戶鐘差;基本原理為雙向衛星中繼無線電偽距同步,是利用GEO衛星轉發器實現地球站間時間同步的方法[2];
6)利用鐘差修正用戶觀測偽距;
7)電離層誤差直接使用格網數據進行電離層修正,或利用回傳的所有可見星觀測數據,計算用戶對可見星的穿刺點,解算不同穿刺點的電離層延遲,進而可內插出用戶的電離層延遲;
8)根據地理高程庫查得UE所在點大地高;
9)MCC根據修正后偽距和高程值組成用戶三維位置的解算方程組,通過查圖迭代計算實現用戶定位及位置報告。
2.廣義定位報告原理
廣義定位報告系統實質上是一個多參考站距離測量無線電定位系統[2]。在傳統雙星定位報告的基礎上,增加了一顆衛星無線電導航(RNSS)衛星,通過增加一個時差觀測量增加一個方程,從而減少了依托高程庫查圖的計算流程,有效提高了定位報告的服務區范圍和實時性。
3.廣義定位報告用戶終端原理
定位報告用戶終端在本地鐘控制下實時采集所有可視導航衛星的RNSS信號,從而測得各衛星的偽距、載波相位等觀測量,同時接收和響應定位報告衛星的詢問信號,將測量得到的各衛星RNSS偽距、載波相位、偏心改正等信息通過定位報告系統入站鏈路傳送給業務處理系統。可通過出站鏈路實時接收定位結果,并在顯示屏上顯示或通過串口輸出[3]。
用戶終端主要可以劃分為天線模塊、信道模塊、基帶信號處理模塊、信息處理模塊、人機交互控制和整機結構等幾部分,具體組成框圖如圖2所示。
三、全球廣義定位報告系統星座配置方案分析
目前定位報告系統在GEO衛星上搭載有效載荷,僅能滿足中國及周邊地區用戶需求。要實現全球定位報告服務,需要增加配置RDSS載荷的衛星數量,從目前的GEO星座向GEO+NGEO星座擴展,即必須在移動衛星上加裝RDSS載荷,并利用廣義定位報告技術體制和星間鏈路進行數據交換。
用戶機可以對可視范圍內5°以上仰角的所有導航衛星信號進行觀測,而定位報告服務只在具備該載荷的衛星覆蓋范圍內才能獲取服務,由于遮擋等原因城市區域對觀測仰角要求較高,因此需要針對不同的衛星配置方案開展觀測仰角分析,得到最高仰角的星座配置方案。從用戶實際使用角度考慮,45°仰角基本能夠確保一般使用環境下的可視要求。
目前全球導航系統全部采用Walker星座構型,其中GLONASS、Galileo采用Walker 24/3/1,GPS采用Walker 24/6/1,下面針對幾種不同的Walker星座配置方案開展分析。
1.Walker X/3/1星座分析
設定衛星星座配置分別為Walker24/3/1、Walker27/3/1、Walker30/3/1和Walker33/3/1,第一軌道面升交點赤經為0°。采用仿真軟件開展全球區域覆蓋分析,設置滿足條件為計算的最高仰角大于等于45°,星座構成如圖3所示。

表1 不同衛星數45°仰角滿足情況
由表1可見,27顆衛星是Walker X/3/1星座中滿足全球服務區高仰角的最佳配置,更多和更少的Walker X/3/1衛星構型均無法改善衛星觀測仰角,此時在全球服務區內可以確保43°的觀測仰角。該方案與北斗全球系統北斗星座5顆GEO衛星的軌道位置分別為58.75°E、80°E、110.5°E、140°E和160°E,3顆IGSO的傾角為55°,交叉點經度為118°E[4]的方案是匹配的。
2. Walker X/4/1星座分析
Walker 24/4/1星座構成如圖4所示。
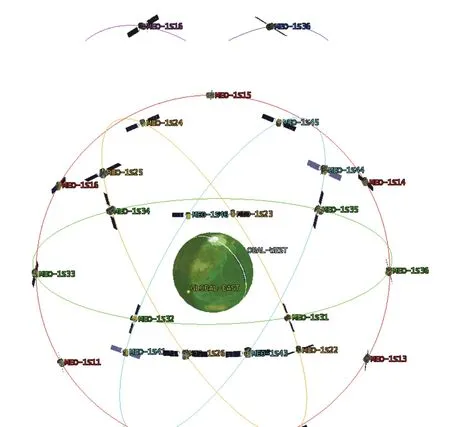
圖4 試算RDSS業務星座構成
由表2可見,32顆衛星是Walker 32/4/1星座中滿足全球服務區高仰角的最佳配置。

表2 不同衛星數45°仰角滿足情況
3. Walker X/5/1星座分析
Walker 25/5/1星座構成如圖5所示。
Walker X/5/1星座的覆蓋性結果如表3所示。

圖5 試算RDSS業務星座構成

表3 不同衛星數45°仰角滿足情況
由表3可見,30顆衛星是Walker 30/5/1星座中滿足全球服務區高仰角的最佳配置,可以100%滿足全球45°仰角觀測。
4. Walker X/6/1星座分析
Walker 24/6/1星座構成如圖6所示。
Walker X/6/1星座的覆蓋性結果如表4所示。

表4 不同衛星數45°仰角滿足情況
由表4可見,24顆衛星是Walker 24/6/1星座中滿足全球服務區高仰角的最佳配置,可以98.81%滿足全球45°仰角觀測。

圖6 試算RDSS業務星座構成
5.比較分析
通過以上不同軌道數量下計算分析,得到全球范圍24~25顆衛星和30顆衛星兩種衛星數量下最小45°仰角滿足情況,如圖7、8所示,統計結果詳見表5。

圖7 服務區內觀測仰角滿足情況

圖8 服務區內觀測仰角滿足情況

表5 不同軌道面不同衛星數45°仰角滿足情況
由表5可見,Walker星座軌道面越多覆蓋性越好,其中24~25顆衛星Walker 24/6/1星座最優,98.81%時段滿足要求;30顆衛星Walker30/5/1星座最優,100%時段滿足要求。
四、結束語
對于一般用戶接收設備,大于45°仰角可以放低對用戶設備天線的要求,因此,全球廣義定位報告業務可在3GEO+3IGSO+24MEO衛星上配置定位報告載荷,利用5~6個MEO衛星軌道平面滿足全球廣義定位報告系統45°仰角的觀測要求。但軌道面過多對維持星座代價較高,一般采用3個軌道面的星座構型,此時可以滿足43°仰角的觀測要求。
本文針對全球廣義定位報告業務可能的配置方案進行了探討,具體方案需要統籌各方面的要求綜合確定。
參考文獻
[1]譚述森,李琳.北斗系統導航定位報告體制與工程技術[J].導航定位學報,2013,3:1-5.
[2]譚述森.導航衛星雙向偽距時間同步[J].中國工程科學,2006,8(12):70-75.
[3]譚述森.廣義衛星無線電定位報告原理及其應用價值[J].測繪學報,2009,38(1):1-5.
[4]楊元喜.中國北斗衛星導航系統對全球PNT用戶的貢獻[J].中國科學,2011,21:1734-1740.