捷聯(lián)尋的彈藥慣性視線重構(gòu)及制導(dǎo)系統(tǒng)設(shè)計(jì)*
2016-03-02 06:24:31金國強(qiáng)馬清華趙陽陽
彈箭與制導(dǎo)學(xué)報(bào) 2016年5期
金國強(qiáng),馬清華,王 蕭,趙陽陽,王 龍
(1 清華大學(xué)自動化系,北京 100084;2 中國兵器工業(yè)第203研究所,西安 710065)
捷聯(lián)尋的彈藥慣性視線重構(gòu)及制導(dǎo)系統(tǒng)設(shè)計(jì)*
金國強(qiáng)1,2,馬清華2,王 蕭2,趙陽陽2,王 龍2
(1 清華大學(xué)自動化系,北京 100084;2 中國兵器工業(yè)第203研究所,西安 710065)
捷聯(lián)導(dǎo)引頭測量信息中耦合了彈體姿態(tài)信息,無法直接運(yùn)用于制導(dǎo)指令解算。基于下視的捷聯(lián)尋的方案,建立了從探測視線信息和彈體姿態(tài)信息中提取慣性視線角的理論解耦模型以及在傾斜穩(wěn)定情況下的簡化形式。通過非線性微分濾波器——跟蹤微分器獲得平滑的慣性視線角速率,設(shè)計(jì)了捷聯(lián)尋的彈藥制導(dǎo)綜合系統(tǒng)。彈道仿真結(jié)果表明:基于下視的捷聯(lián)尋的方案能夠有效實(shí)現(xiàn)近程制導(dǎo)彈藥的精確制導(dǎo),具有一定的工程價(jià)值。
捷聯(lián)導(dǎo)引頭;下視;慣性視線角速率;跟蹤微分器
0 引言
近些年來的多場局部戰(zhàn)爭和地區(qū)性反恐戰(zhàn)爭表明,精確制導(dǎo)武器已經(jīng)成為現(xiàn)代局部戰(zhàn)爭戰(zhàn)場上至關(guān)重要的攻防手段,用精確制導(dǎo)武器實(shí)現(xiàn)在城市、山區(qū)等復(fù)雜作戰(zhàn)環(huán)境下的精確打擊,從而奪取戰(zhàn)爭的主動權(quán)形成戰(zhàn)場威懾也是未來戰(zhàn)爭模式的發(fā)展方向。隨著光學(xué)、雷達(dá)等探測器的視場角范圍的提高和尋的跟蹤技術(shù)的發(fā)展,捷聯(lián)尋的導(dǎo)引頭越來越多的成功應(yīng)用于小型制導(dǎo)彈藥上,捷聯(lián)尋的制導(dǎo)體制也成為精確制導(dǎo)武器未來發(fā)展的主要方向之一。
與傳統(tǒng)平臺穩(wěn)定式導(dǎo)引頭相比,捷聯(lián)導(dǎo)引頭結(jié)構(gòu)簡單、成本低、抗高過載,易于小型化和系統(tǒng)共型設(shè)計(jì)[1]。但是捷聯(lián)導(dǎo)引頭將探測裝置與彈體進(jìn)行固聯(lián),只能測量探測裝置中軸與目標(biāo)視線的角偏差,無法精確獲得用于制導(dǎo)的慣性視線角速率,同時直接測量的角偏差在慣性視線角上耦合了彈體姿態(tài)角擾動信息,故捷聯(lián)尋的制導(dǎo)彈藥慣性視線重構(gòu)成為捷聯(lián)制導(dǎo)體制研究的重點(diǎn)[2-3]。
文中基于捷聯(lián)導(dǎo)引頭在近程制導(dǎo)火箭上的應(yīng)用,采用導(dǎo)引頭下視方案,首先推導(dǎo)出了捷聯(lián)尋的慣性視線角速率的理論解耦公式及傾斜穩(wěn)定條件下的簡化形式,進(jìn)而引入非線性微分濾波器對直接參與制導(dǎo)的慣性視線角速率進(jìn)行提取,并設(shè)計(jì)了捷聯(lián)制導(dǎo)控制系統(tǒng),通過六自由度彈道數(shù)字仿真對上述工作進(jìn)行驗(yàn)證與分析。
1 下視捷聯(lián)導(dǎo)引頭彈目視線模型
捷聯(lián)導(dǎo)引頭測量信息是目標(biāo)相對于探測裝置中軸的角偏差,由于探測裝置彈體固聯(lián),因此彈體在慣性空間中的運(yùn)動必然會耦合到測量信息中,要想得到慣性空間下彈目視線信息用于制導(dǎo),必須去除導(dǎo)引頭直接測量信息中耦合的彈體運(yùn)動。
文中所研究的彈體在擾動條件下姿態(tài)變化較大,由于導(dǎo)引頭視場大小限制,在飛行過程中彈目視線會出現(xiàn)超出視場范圍或處于視場邊緣非線性區(qū)域的情形,嚴(yán)重影響制導(dǎo)過程。而在攻擊地面目標(biāo)時,導(dǎo)引頭高低視線只處于單向視場中,為此采用高低方向下視方案,令導(dǎo)引頭探測裝置中軸在彈體縱向?qū)ΨQ面中基于彈體縱軸向下偏離λ角度,為下視角(λ>0)。
為研究下視捷聯(lián)導(dǎo)引頭彈目視線模型,引入3個新的坐標(biāo)系(見圖1):1)探測坐標(biāo)系Oxdydzd原點(diǎn)O為探測裝置中心,Oxd與探測裝置中軸重合,指向?qū)楊^部為正,Ozd與Ozb重合,Oyd與Oxd、Ozd構(gòu)成右手坐標(biāo)系;2)探測視線坐標(biāo)系Oxkykzk原O點(diǎn)為探測裝置中心,Oxk與彈目連線重合,指向?qū)棡檎?Ozk處于Oxdzd平面中且與Oxk垂直,Oyk與Oxk、Ozk構(gòu)成右手坐標(biāo)系;3)視線坐標(biāo)系Oxsyszs原點(diǎn)O為探測裝置中心,Oxs與Oxk重合,Ozs處于Oxz平面中且與Oxs垂直,Oys與Oxs、Ozs構(gòu)成右手坐標(biāo)系。各坐標(biāo)系之間的轉(zhuǎn)換關(guān)系見圖2,其中探測視線俯仰角?k為Oxk軸與平面Oxdzd之間夾角,探測視線方位角ψk為Oxk軸在平面Oxdzd內(nèi)的投影與Oxd軸的夾角;視線俯仰角qv為Oxs軸與平面Oxz之間夾角,視線方位角qh為Oxs軸在平面Oxz內(nèi)的投影與Ox軸的夾角;視線轉(zhuǎn)換角qc為Oyk軸與Oys軸之間的夾角。
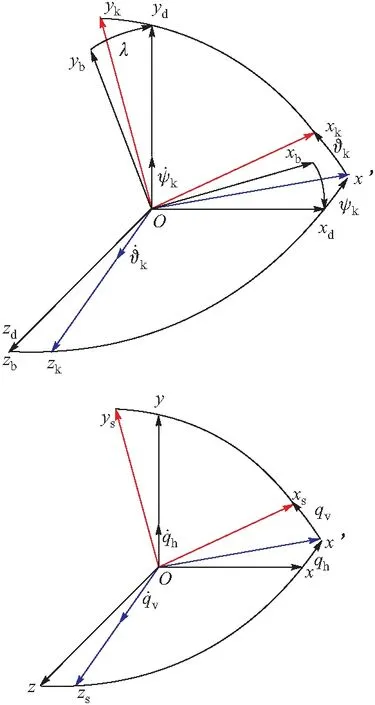
圖1 坐標(biāo)系及角度定義
在導(dǎo)彈實(shí)際飛行過程中,捷聯(lián)導(dǎo)引頭只能獲得探測視線角?k、ψk,而參與制導(dǎo)的慣性視線角qv、qh對應(yīng)的角速率信息只能通過解耦計(jì)算間接獲得,解耦理論計(jì)算公式推導(dǎo)如下。
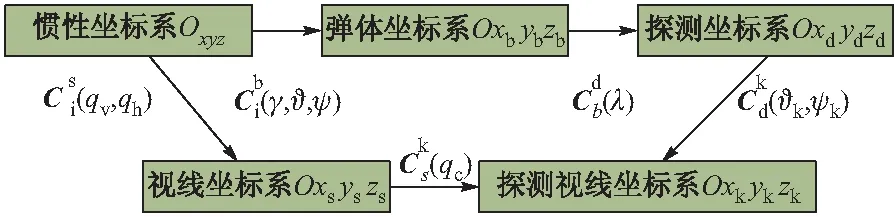
圖2 各坐標(biāo)系之間轉(zhuǎn)換關(guān)系
由于Oxs軸與Oxk軸重合,故視線坐標(biāo)系中的單位向量R=(1,0,0)′在探測視線坐標(biāo)系下的坐標(biāo)亦為(1,0,0)′,通過圖2可知在慣性坐標(biāo)系下R的坐標(biāo)Ri可由兩種方法計(jì)算[4]:
(1)
(2)
得:

(3)
由式(3)可求得:
qv=arcsin(Q)
(4)
(5)
Q=sin?k·(sin?sinλ+cos?cosγcosλ)+cos?kcosψk· (sin?cosλ-cos?cosγsinλ)+cos?sinγcos?ksinψk
M=sin?k·(cosλ·(cosψsinγ+sin?sinψcosγ)- cos?sinψsinλ)-cos?ksinψk·(cosψcosγ- sin?sinψsinγ)-cos?kcosψk·(sinλ· (cosψsinγ+sin?sinψcosγ)+cos?sinψcosλ)
N=sin?k·(cosλ·(sinψsinγ-sin?cosψcosγ)+ cos?cosψsinλ)-cos?ksinψk·(sinψcosγ+ sin?cosψsinγ)-cos?kcosψk·(sinλ· (sinψsinγ-sin?cosψcosγ)-cos?cosψcosλ)
根據(jù)式(4)、式(5)便得到了根據(jù)慣性測量組件得到的彈體姿態(tài)角以及捷聯(lián)探測器得到的探測視線角解耦計(jì)算慣性系下彈目視線信息的方法。在實(shí)際應(yīng)用中,考慮到傾斜穩(wěn)定有利于探測器鎖定目標(biāo)、導(dǎo)彈穩(wěn)定飛行以及制導(dǎo)方案實(shí)施,故一般在傾斜穩(wěn)定γ=0的條件下對式(4)、式(5)進(jìn)行化簡得:
從上式可以看出傾斜穩(wěn)定對于慣性視線角解耦計(jì)算而言大大簡化,有利于導(dǎo)彈飛行過程中實(shí)時在線解耦計(jì)算以提高彈目視線制導(dǎo)信息精度。
高低方向下視方案保證了目標(biāo)在探測裝置視場中的線性區(qū),有利于提高彈目視線測量精度保證精確制導(dǎo)過程。圖3是探測器俯仰視場±10°時非下視方案與下視角λ=3°在某干擾條件飛行下探測視線俯仰角對比,可以看出非下視方案中已經(jīng)出現(xiàn)出視場的情況,同時有一段時間靠近視場邊緣,而下視方案則有效的避免了上述問題,充分利用了探測器視場范圍。
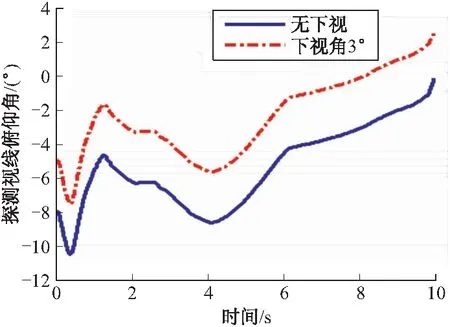
圖3 探測視線俯仰角對比
2 基于跟蹤微分器的視線角速率提取
由一般情況及傾斜穩(wěn)定條件下式(4)、式(5)已可得到通過探測器測量的視線信息以及慣性器件測量的彈體角運(yùn)動信息解算出來的慣性視線角;在制導(dǎo)系統(tǒng)設(shè)計(jì)的比例導(dǎo)引中,直接用到的信息為慣性視線角速率,故需要從由上述解算信號中合理提取微分信號。
傳統(tǒng)的直接差分微分器如下:
n(t)為原始信號中的噪聲信號。微分步長τ越小時,微分信號中噪聲影響越大。由于捷聯(lián)制導(dǎo)探測器及慣性器件存在測量噪聲,故通過傳統(tǒng)差分微分器提取的慣性視線角速率無法應(yīng)用于比例導(dǎo)引制導(dǎo)律之中,必須設(shè)計(jì)出合適有效的微分濾波器。
為從耦合測量噪聲的原始信號中提取連續(xù)的濾波信號和微分信號,韓京清[5]提出了非線性跟蹤微分器。非線性跟蹤微分器的輸出x1(t)與x2(t)可分別看作是原始信號v(t)及其微分信號v′(t)的光滑逼近,基于快速最優(yōu)控制的離散形式下的非線性跟蹤微分器可取為[6]:
(6)
式中fst函數(shù)為最速控制綜合函數(shù),計(jì)算如下:
fst(x1(k)-v(k),x2(k),r,h1)=-r·sat(g(k),δ)
h為跟蹤步長,h1為濾波因子,r為跟蹤因子。當(dāng)r越大,輸出信號就能越快跟隨原始信號但同時會放大耦合噪聲影響;當(dāng)h1越大,輸出信號的抗干擾特性越好但同時會增大相位延遲。為了既取得良好的實(shí)時跟蹤效果,同時盡量消除測量噪聲影響,需要對h1和r進(jìn)行權(quán)衡綜合考慮。
仿真中在理想慣性視線角度上加入3σ=0.2°的白噪聲,跟蹤微分器中濾波因子h1=5h,跟蹤因子r=20,計(jì)算結(jié)果如圖4所示。在沒有濾波的情況下,測量噪聲被差分器微分放大使得有效慣性視線角速率信號完全湮沒在誤差信息中,無法用于制導(dǎo)指令解算;而跟蹤微分器則能獲得慣性視線角速率的平滑逼近信號,具有較好的跟蹤和濾波特性。
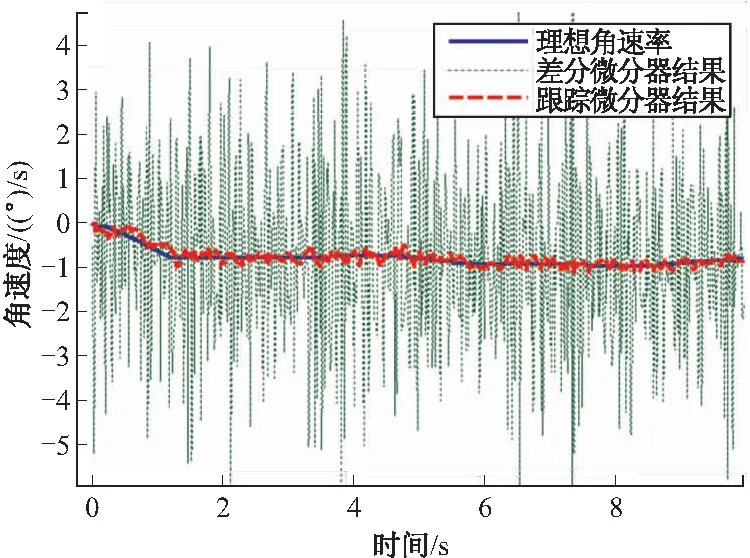
圖4 慣性視線角速率
3 制導(dǎo)系統(tǒng)設(shè)計(jì)
捷聯(lián)制導(dǎo)彈藥的制導(dǎo)系統(tǒng)設(shè)計(jì)中,一般采用彈上捷聯(lián)低成本的慣性測量裝置——微機(jī)電陀螺儀測量彈體三軸姿態(tài)角速率,不僅為穩(wěn)定彈體的控制內(nèi)回路提供輸入信息,同時也用于在線解耦計(jì)算慣性視線角速率為制導(dǎo)回路提供制導(dǎo)信息。故捷聯(lián)探測器與彈上慣性測量裝置以及信息計(jì)算處理中心形成基于比例導(dǎo)引的制導(dǎo)和控制彈體姿態(tài)平穩(wěn)的自動駕駛儀綜合系統(tǒng),不僅對彈體姿態(tài)進(jìn)行穩(wěn)定控制保證其擺動不超出捷聯(lián)探測器的瞬時視場以實(shí)現(xiàn)對目標(biāo)的有效跟蹤,同時生成制導(dǎo)指令使得導(dǎo)彈速度矢量按照導(dǎo)引律進(jìn)行變化實(shí)現(xiàn)對目標(biāo)的精確攻擊。制導(dǎo)綜合系統(tǒng)如圖5所示。
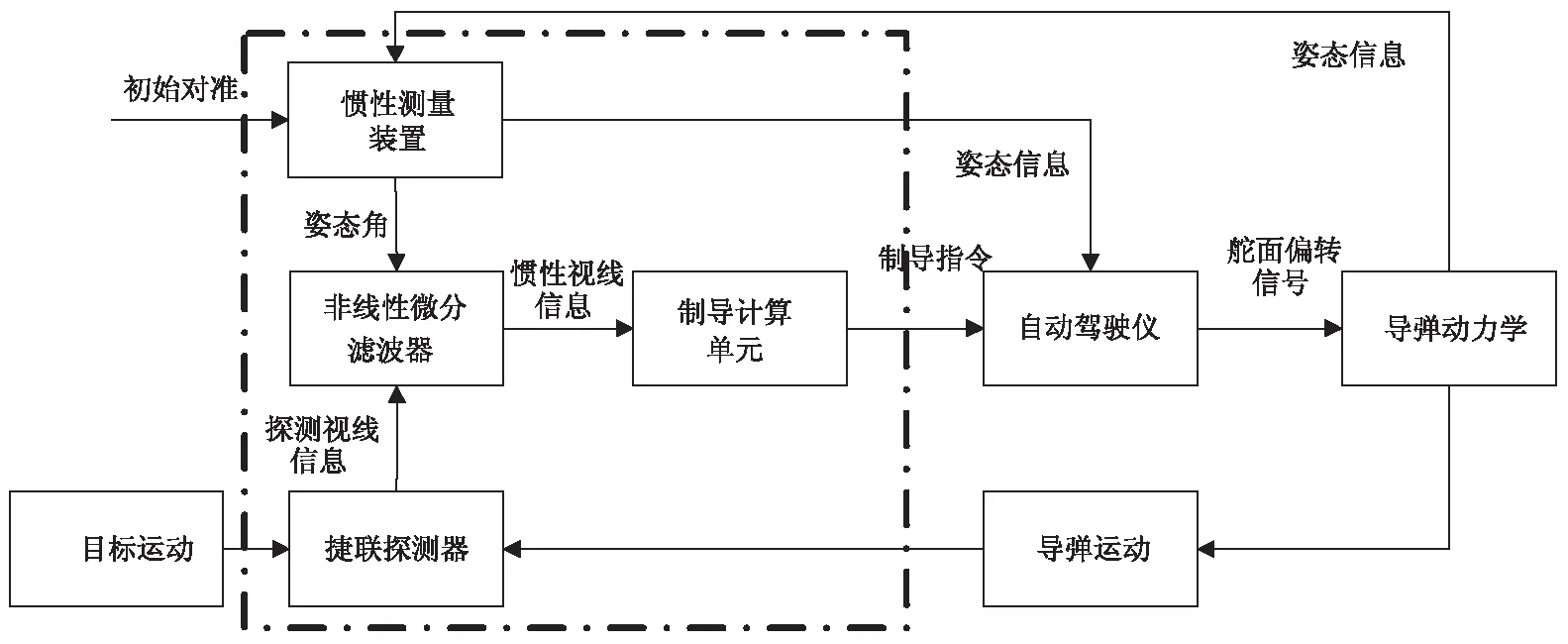
圖5 制導(dǎo)綜合系統(tǒng)
圖中虛線框中各部件及信息處理計(jì)算單元可以用一體化的捷聯(lián)制導(dǎo)控制組件替代,除了實(shí)現(xiàn)圖中目標(biāo)信號采集、探測信號處理、陀螺信號采集及姿態(tài)解算、制導(dǎo)控制指令生成外,還可完成電源管理、時序控制、舵機(jī)驅(qū)動等其他功能,進(jìn)一步加強(qiáng)捷聯(lián)制導(dǎo)彈藥部件的模塊化、小型化、集成化和低成本。
值得一提的是,在慣性視線重構(gòu)的過程中同時用到捷聯(lián)探測器測量的探測視線信息以及慣性裝置測量的彈體姿態(tài)信息,兩個傳感器同時存在測量誤差且刻度尺和動態(tài)模型不一致會帶來導(dǎo)引頭隔離度,從而在制導(dǎo)回路中會引起“彈體運(yùn)動→慣性測量裝置→慣性視線重構(gòu)→制導(dǎo)指令解算→自動駕駛儀→彈體運(yùn)動”的寄生回路[7],即在各種誤差干擾的作用之下,從耦合了彈體運(yùn)動信息的探測視線信息中解算出的慣性視線角,經(jīng)過非線性微分濾波器之后產(chǎn)生的慣性視線角速率存在一定的偏差,通過比例導(dǎo)引制導(dǎo)律生成制導(dǎo)指令經(jīng)自動駕駛儀驅(qū)動彈上舵面偏轉(zhuǎn)控制導(dǎo)彈運(yùn)動帶來的彈體姿態(tài)改變,經(jīng)隔離度后通過探測器和慣性裝置測量信息重構(gòu)慣性視線,從而形成了閉環(huán)。寄生回路不僅會影響探測器對目標(biāo)的穩(wěn)定跟蹤,同時會帶來相應(yīng)的制導(dǎo)誤差,故需要采取措施抑制捷聯(lián)制導(dǎo)彈藥寄生回路的影響。相關(guān)的討論不在文中考慮范圍之內(nèi)。
4 數(shù)字仿真
在數(shù)字仿真中設(shè)置靜止地面目標(biāo),位置為Pi0=(1.8 km,0,0)。近程制導(dǎo)火箭在地面發(fā)射,初始飛行段通過MEMS慣性器件測姿進(jìn)行姿態(tài)閉環(huán)控制;當(dāng)姿態(tài)穩(wěn)定后在某一時間開始進(jìn)入制導(dǎo)段,采用經(jīng)典的比例導(dǎo)引制導(dǎo)率,主要輸入信息為按前文方法提取的慣性視線角速率。仿真結(jié)果如圖6、圖7所示。結(jié)果表明文中所述慣性視線重構(gòu)算法能夠獲得制導(dǎo)所需的慣性視線角速率,基于此方案的捷聯(lián)尋的彈藥能夠精確打擊近程目標(biāo),滿足命中精度要求和戰(zhàn)術(shù)使用需求。
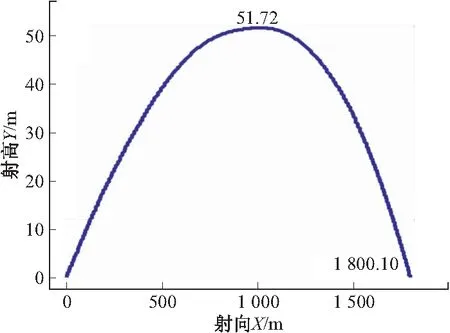
圖6 縱向彈道
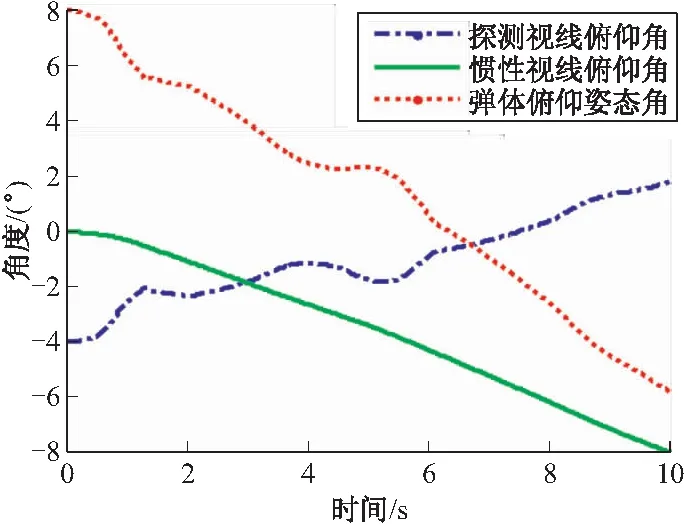
圖7 彈體俯仰角與視線俯仰角
5 結(jié)論
捷聯(lián)制導(dǎo)方案對于尋的制導(dǎo)彈藥的低成本、小型化、高可靠性發(fā)展方向具有重要意義,但捷聯(lián)導(dǎo)引頭無法直接給出制導(dǎo)所需的慣性視線角速率。文中基于捷聯(lián)導(dǎo)引頭下視安裝方案,建立了結(jié)合彈體姿態(tài)信息從探測信息中提取慣性視線角的解耦模型及其在傾斜穩(wěn)定情況下的簡化形式,并通過跟蹤微分器獲得慣性視線角速率用于制導(dǎo)綜合系統(tǒng)設(shè)計(jì)。結(jié)果表明:下視的捷聯(lián)制導(dǎo)方案能夠保證彈道全程目標(biāo)始終處于導(dǎo)引頭線性區(qū)中,非線性跟蹤微分器提取的慣性視線角速率能夠運(yùn)用于制導(dǎo)綜合系統(tǒng)中指令解算,制導(dǎo)精度滿足尋的彈藥總體設(shè)計(jì)需求,為工程應(yīng)用提供了理論支撐。對于由導(dǎo)引頭隔離度帶來的寄生回路,需要進(jìn)一步研究相關(guān)的信號處理修正方法以減小其對彈體姿態(tài)穩(wěn)定和制導(dǎo)精度的影響。
[1] 祁載康. 制導(dǎo)彈藥技術(shù) [M]. 北京: 北京理工大學(xué)出版社, 2002: 99-100.
[2] 姚郁, 章國江. 捷聯(lián)成像制導(dǎo)系統(tǒng)的若干問題探討 [J]. 紅外與激光工程, 2006, 35(1): 1-6.
[3] VERGEZ P L, MCCLENDON J R. Optimal control and estimation for strapdown seeker guidance of tactical missiles [J]. Journal of Guidance Control and Dynamics, 2012, 5(3): 225-226.
[4] 李璟璟. 捷聯(lián)成像導(dǎo)引頭視線角速率估計(jì)方法研究 [D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2008.
[5] 韓京清, 王偉. 非線性跟蹤-微分器 [J]. 系統(tǒng)科學(xué)與數(shù)學(xué), 1994, 14(2): 177-183.
[6] 武利強(qiáng), 林浩, 韓京清. 跟蹤微分器濾波性能研究 [J]. 系統(tǒng)仿真學(xué)報(bào), 2004, 16(4): 651-652.
[7] KIM D, RYOO C K, KIM Y, et al. Guidance and control for missiles with a strapdown seeker [C]∥Proc. of the American Institute of Aeronautics and Astronautics Guidance, Navigation, and Control Conference, 2010: 2-5.
LOS Angle Reconstruction and Guidance System Design of Strapdown Seeker Homing Munitions
JIN Guoqiang1,2,MA Qinghua2,WANG Xiao2,ZHAO Yangyang2,WANG Long2
(1 Department of Automation, Tsinghua University, Beijing 100084, China; 2 No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
Detecting information of strapdown seeker was coupled with missile attitude information, so it can’t be used for calculating guidance command directly. Based on the downward-looking strapdown homing scheme, the theoretical decoupling model of LOS(line-of-sight) angle from detecting LOS information and missile attitude information was established, as well as its simplified form under rolling stabilizing circumstance. By means of a nonlinear differential filter-tracking differentiator, smooth inertial LOS rate was acquired and a guidance synthetic system of strapdown seeker homing munitions was designed. Trajectory simulation results show that, based on downward-looking strapdown homing scheme, precise guidance of short-range guided munitions can be accomplished effectively, which has definite value in engineering.
strapdown seeker; downward-looking; initial LOS rate; tracking differentiator
2015-12-29
金國強(qiáng)(1991-),男,湖北荊門人,碩士研究生,研究方向:導(dǎo)彈導(dǎo)航、制導(dǎo)與控制。
TJ765.3
A
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28