基于改進Otsu算法在前方目標車輛識別中的研究
2016-02-27 03:51:43霍春寶
計算機技術與發展 2016年6期
關鍵詞:區域
洪 浩,霍春寶,王 京,王 燕
(1.遼寧工業大學 電氣工程學院,遼寧 錦州 121001;2.遼寧省電力有限公司錦州供電公司,遼寧 錦州 121001;3.北京印刷學院 機電工程學院,北京 102600)
基于改進Otsu算法在前方目標車輛識別中的研究
洪 浩1,霍春寶1,王 京2,王 燕3
(1.遼寧工業大學 電氣工程學院,遼寧 錦州 121001;2.遼寧省電力有限公司錦州供電公司,遼寧 錦州 121001;3.北京印刷學院 機電工程學院,北京 102600)
在防碰撞預警系統中,使用常見的圖像分割算法識別車輛時,易造成目標的特征信息丟失以及邊緣模糊化的現象,因此文中采用了一種基于最大類間方差法與遺傳算法相結合的分割算法。該算法先用正態分布概率密度函數確定前方車道區域灰度值的閾值范圍;然后對遺傳算法的初始種群進行交叉、變異操作以尋找分割閾值的最優解;在此基礎上,結合最大類間方差法的自適應性,在給定的閾值范圍內進行局部最優搜索;最后,獲取圖像分割的最佳閾值。研究結果表明,在光線昏暗、攝像頭破損等情況下,改進算法具有很好的識別性,它不僅能有效地分割出目標車輛與背景,同時還大大地縮短了運行時間,提高了分割的時效性。通過Matlab仿真實驗得出,改進算法在前方目標車輛識別中有明顯的優勢。
防碰撞預警系統;車輛識別;最大類間方差法;遺傳算法;圖像分割
0 引 言
圖像分割是計算機圖像處理的一個重要環節。圖像分割是指根據圖像的灰度、顏色、紋理、幾何形狀等特性,提取出感興趣區域的過程[1-3]。然而,如何快速、準確、自適應地識別前方目標車輛是一個十分重要的問題。在防碰撞預警系統中,經過對前方道路路面區域采用Hough變換得到理想的車道線后,就能有效地把路面區域劃分為車道區域和非車道區域[4-5]。同時,為了有效利用陰影特征識別前方目標車輛,可以將檢測范圍縮小到車道區域,這樣就能提高前方車輛檢測和跟蹤的精度,避免了非車道區域造成的干擾。但是,道路路面區域的灰度值是不均勻的,在攝像機距離遠的區域內顏色較淺,像素灰度值較大;攝像機距離近的區域內顏色較深,像素灰度值較小[6]。如果直接在ROI(Region Of Interest)區域內使用Otsu法進行車輛與背景的分割,近景的一部分道路也會誤檢為目標。因此,如何準確地、清晰地把目標車輛從背景中分離是一個十分關鍵的問題。分離的好壞將直接影響目標車輛的跟蹤精確性以及預警系統的穩定性。
為了解決這個問題,文中采用基于最大類間方差法與GA相結合的分割算法。該方法不僅能夠較清晰地分離出目標車輛,還可以大大節省目標搜尋時間,提高了目標車輛分離的時效性。
1 Otsu閾值分割算法
Otsu閾值分割算法是在1978年由日本學者大津提出的。它是一維最大類間方差法,是在結合了最小二乘法原理的基礎上推導出來的[7-8]。該算法是一種自適應的、有效的圖像分割算法。它通過衡量目標區域的灰度均值、背景區域的灰度均值以及整幅圖像的灰度均值之間的方差來選取最佳閾值。當方差越大時,目標區域就越能從背景區域分割出來。
1.1 Otsu算法基本原理
Otsu算法的基本原理[9-11]是利用一閾值先把原圖像分成目標和背景兩部分,然后分別計算當前閾值下目標部分和背景部分的區域概率、區域平均灰度以及圖像的總平均灰度和類間方差,并采用遍歷的方法使類間方差達到最大,此時的閾值就是最佳閾值。Otsu法對圖像中的噪聲和目標部分的大小十分敏感,它僅對類間方差為單峰的圖像有較好的分割效果。同時,該方法不需要人為設定參數,是一種自適應的閾值選擇方法。它不僅適用于兩個區域的單閾值選擇,也適用于多區域的多閾值選擇。
1.2 Otsu算法的公式推導

(1)
各灰度值出現的概率為:
(2)
對于pi,有:
(3)
設T把圖像中的像素分成C0和C1兩類,在[0,T-1]區間的像素組成C0,在[T,L-1]區間的像素組成C1[12]。則區域C0和C1的概率分別為:
(4)
(5)
區域C0和C1的平均灰度分別為:
(6)
(7)
其中,μ是整幅圖像的平均灰度。
(8)
此時,區域C0和C1的內部方差為:
(9)
(10)
兩個區域的總方差為:

2 改進的Otsu閾值分割算法
(12)
其中,μ為車道區域灰度的平均值;δ為車道區域灰度的方差。
根據圖1可知,正態變量在[μ-3δ,μ+3δ]區間范圍內的概率高達99.7%以上,在[-,μ-3δ]和[μ+3δ,+]區間范圍內概率極小,那么最優閾值必在[μ-3δ,μ+3δ]范圍內。
改進算法流程如下:
(1)選取N個小矩形窗口,每一個窗口大小為50*50像素,且每個窗口間隔50像素,這樣的區域采樣能夠獲取最接近車道區域實際灰度值的取樣值。
(2)分別計算出小矩形窗口各自的灰度均值μi和方差均值δi,選取它們的灰度均值和方差均值的平均值作為該車道區域的灰度值μm和方差值δm。


圖1 正態分布概率密度函數
(4)隨機產生N個第一次尋優的初始種群,通過bs2rv函數進行二進制碼和實值的轉變(N=10)。
(5)計算種群中各個個體的適應度值:f(X11)-f(X1N),公式如下:
P1=S1/I,P2=S2/J


(6)選擇。以Matlab中GA的select作為選擇程序,設代溝GAP=0.9,即每次遺傳后子代數量為父代的90%,沒有完全被復制,有部分剩余。
(7)交叉。打亂種群中個體的順序,然后隨機排序,兩兩組成新的一組,并根據事先預定的交叉概率進行交叉操作,生成新一代種群(交叉概率Pc=0.7)。
(8)變異。使用變異概率Pm(Pm=0.4)變異當前種群每一行相對應的一個個體中的每一個元素,進而形成新一代群體。
(9)終止。設定指定代數G(G=150)作為尋優循環跳出的判斷條件,如不滿足,則此時的第一代群體是新生成的群體,然后轉到步驟(3)繼續尋優;否則轉到步驟(7)。
(10)若終止條件滿足,則GA最優解輸出就是最后一代群體中適應度最大的個體,再將其反編碼,得到對應的十進制灰度值t,則t就是GA得到的閾值。
(11)依據設定的閾值A,結合最大類間方差法在[t-A,t+A]范圍內進行局部最優搜索,即求得圖像分割的最佳閾值。
3 實驗結果與分析
為了驗證改進的Otsu閾值分割算法的優越性,文中分別對圖2中的兩幅不同的車道區域進行仿真實驗。

圖2 兩種不同路面的車道區域
實驗平臺是Pentium4,內存為1G,運行環境為MATLAB7.0。
從圖3(a)和圖4(a)可知,在進行車輛識別前,先對車道區域進行粗提取,把非有效區域,如天空區域等去除,得到ROI區域,這樣不僅可以提高目標車輛跟蹤的精確度,也節省了計算量。

圖3 用不同的方法得到普通車道區域的目標車輛識別結果
從圖3(b)、(c)和圖4(b)、(c)可以看出,Otsu算法的分割結果不能完整、清晰地把目標車輛從背景中識別出來,這樣會給車輛的目標跟蹤造成誤檢,而改進的Otsu算法對于普通的車道區域或者帶有標識線的車道區域都能較好地分離目標和背景,提取車輛底部的陰影區域。因此,文中提出的改進算法更能滿足實時性的需求。
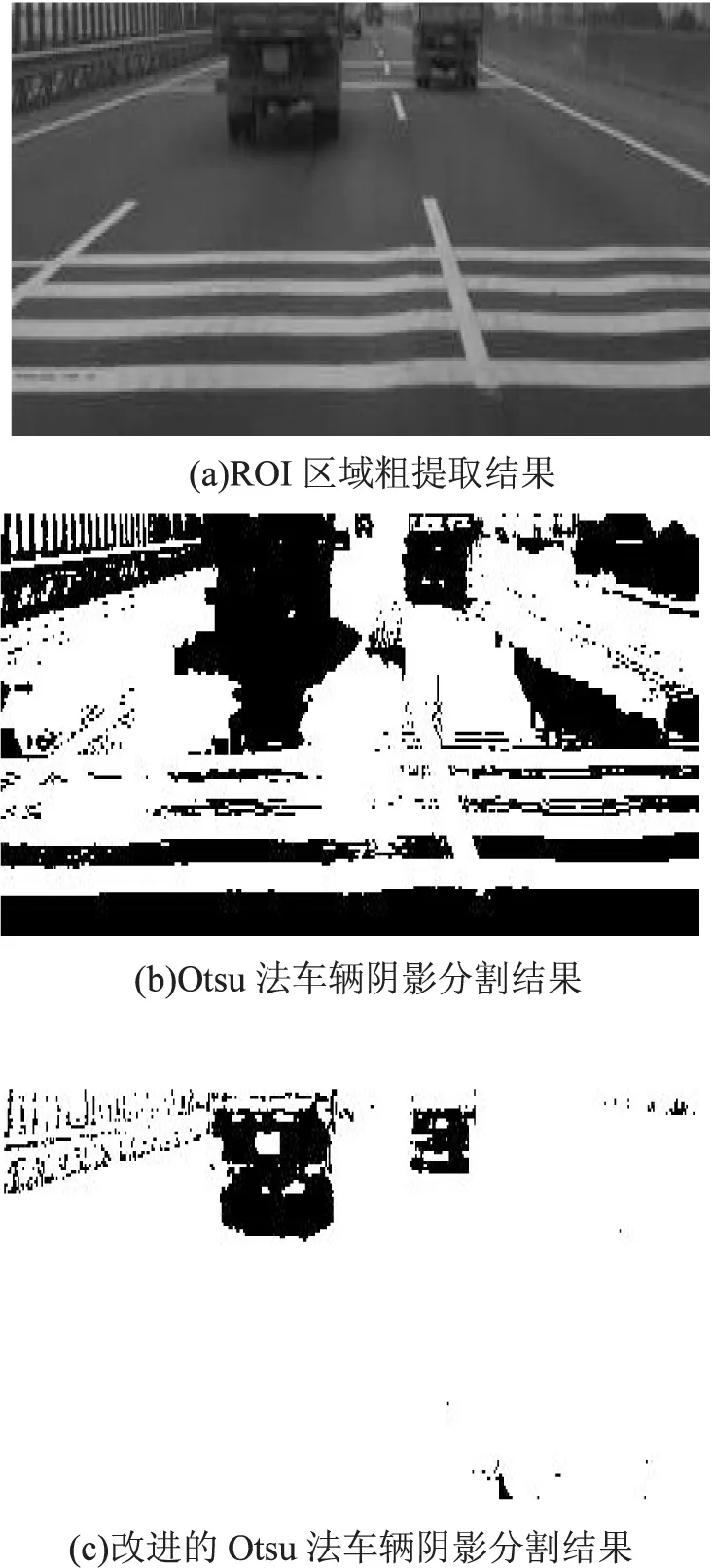
圖4 用不同的方法得到帶有標識線車道區域的目標車輛識別結果
同時,為了驗證改進算法的運行速度和性能,表1給出了比較結果。

表1 改進算法與傳統Otsu算法運行時間與閾值的比較
4 結束語
面對現有的Otsu算法在不同的車道區域識別目標車輛時出現的完整性和清晰性等問題,文中提出了一種改進算法。先在車道區域內求取各個區域各自的灰度均值和方差,然后根據車道區域的像素灰度值符合正態分布來設定理想閾值的范圍,同時利用遺傳算法的并行特性,并結合傳統的Otsu算法。實驗結果表明,改進算法具有良好的可行性,與傳統的Otsu算法相比,改進算法分割效果更明顯,并且大大減少了計算量和運行時間。所以文中提出的改進算法具有較好的識別性。
[1] 褚巧龍.基于Otsu的圖像閾值分割算法的研究[D].秦皇島:燕山大學,2014.
[2] 丁紅軍,蔡鴻杰,邢克禮.遺傳神經網絡在圖像分割中的應用研究[J].自動化技術與應用,2010,29(3):8-12.
[3] 李俊山,李旭輝.數字圖像處理[M].北京:清華大學出版社,2013:26-28.
[4] 馮 月.基于單目視覺的前方車輛檢測和測距方法研究[D].北京:北京化工大學,2013.
[5] 胡會珍.基于視覺的運動車輛識別與跟蹤方法研究[D].太原:中北大學,2012.
[6] 李 青,鄭南寧,馬 琳,等.基于主元神經網絡的非結構化道路跟蹤[J].機器人,2005,27(3):247-251.
[7]ZhangS,BebisG,MillerR.On-roadvehicledetectionusingopticalsensors:areview[C]//ProceedingsofThe7thInternationalIEEEconferenceonintelligenttransportationsystems.[s.l.]:IEEE,2009:585-590.
[8] 張東生.基于閾值的圖像分割算法研究[D].大慶:東北石油大學,2011.
[9]LinZH.ThecellimagesegmentationbasedontheK-LtransformandOTSUmethod[C]//Proceedingsof2011internationalconferenceonmultimediaandsignalprocessing.Washington,DC:IEEEComputerSociety,2014:25-28.
[10] 鄭 宏,潘 勵.基于遺傳算法的圖像閾值的自動選取[J].中國圖象圖形學報,2009,4(4):327-330.
[11] 吳成柯,劉 靖,徐正偉,等.圖像分割的遺傳算法方法[J].西安電子科技大學學報,1996,23(1):34-41.
[12] 黃建新,劉 懷,黃 偉.基于遺傳算法的圖像分割閾值選取[J].南京師范大學學報:工程技術版,2007,7(1):14-17.
[13] 侯格賢,吳成柯.圖像分割質量評價方法研究[J].中國圖象圖形學報,2010,5(1):39-43.
[14] 汪筱紅,須文波.基于遺傳算法的閾值圖像分割研究[J].太原師范學院學報:自然科學版,2007,6(3):111-113.
[15] 高廣春,熊 凱,趙勝穎,等.自適應小波變換更新濾波器的優化研究[J].電路與系統學報,2011,16(3):81-86.
[16] 袁超偉,王桃榮.基于第二代小波變換的多分辨率圖像水印方案[J].北京郵電大學學報,2002,25(3):93-97.
Research on Front Target Vehicle Identification Based on Improved Otsu Algorithm
HONG Hao1,HUO Chun-bao1,WANG Jing2,WANG Yan3
(1.College of Electrical Engineering,Liaoning University of Technology,Jinzhou 121001,China;2.Power Company Limited of Liaoning Electric Power Supply Co.,Ltd.,Jinzhou 121001,China;3.School of Mechatronic Engineering,Beijing Institute of Graphic Communication,Beijing 102600,China)
In the anti-collision warning system,the common image segmentation algorithm in identifying vehicle often causes the phenomenon that loss of information about the target feature and edge blurring.Therefore,it puts forward an improved image segmentation algorithm based on the Otsu algorithm and GA in this paper.This algorithm first confirms a threshold range of the front lane area by the normal distribution function,then crossovers and mutates the initial population of GA to search the optimal segmentation threshold.On this basis,combined with the adaptivity of Otsu,it searches the local optimum in the range of a set threshold.Finally,the optimal threshold of image segmentation is obtained.The results show that the improved algorithm has a good recognition performance in the light of the dim light and the damage of the camera.It not only can effectively segment the target vehicle and the background,but also greatly shorten the running time and improve the efficiency of the segmentation.Through simulation,the improved algorithm has obvious advantages in identifying the target vehicle in front.
anti-collision warning system;vehicle identification;Otsu;GA;image segmentation
2015-08-31
2015-12-04
時間:2016-05-25
遼寧省科技計劃聯合基金項目(2015020047);北京市青年教師拔尖人才項目(TXM2015-014223-000007)
洪 浩(1989-),男,碩士研究生,研究方向為圖像分割、模式識別;霍春寶,教授,碩士研究生導師,研究方向為圖像處理以及智能主動安全。
http://www.cnki.net/kcms/detail/61.1450.TP.20160525.1700.018.html
TP391.4
A
1673-629X(2016)06-0078-04
10.3969/j.issn.1673-629X.2016.06.017
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15