一種基于多線陣集成TDICCD的低軌成像驅動方法
2016-02-21 02:51:12李強樊奔陳希
航天返回與遙感 2016年1期
李強 樊奔 陳希
(北京空間機電研究所,北京 100094)
一種基于多線陣集成TDICCD的低軌成像驅動方法
李強 樊奔 陳希
(北京空間機電研究所,北京 100094)
隨著用戶對星載對地觀測相機的多光譜需求提高,芯片集成化能力的提升,多線陣集成的時間延時積分電荷耦合器件(TDICCD)在航天產品中得到越來越多的重視和應用。文章分析了TDICCD圖像傳感器在低軌成像時的特點,提出了一種基于多線陣集成TDICCD在垂直轉移時間變短情況下的驅動方式,采用現場可編程門陣列作為硬件處理平臺,使用高速集成電路硬件編程語言設計了多線陣集成TDICCD驅動時序。經軟件仿真驗證和硬件實際成像測試,該設計的時序可以滿足傳感器正確、穩定的工作要求,搭建系統驗證了產生時序的正確性,通過采集成像圖像并進行了分析,最終確定驅動傳感器工作正常,且能有效解決不同線陣間的成像干擾,提高了傳感器的成像品質。
多線陣集成 時間延時積分電荷耦合器件 垂直轉移時鐘 軌道高度 空間遙感相機
0 引言
高分辨率對地觀測衛星大多運行在200~1 000km的近地太陽同步軌道上[1],在高分辨率對地觀測相機對地成像時,為了減小相機的相對孔徑,提高空間遙感相機成像的能力,一般都采用時間延時積分電荷耦合器件(time delayed integration charge-coupled device,TDICCD)或面陣電荷耦合器件的時間延時積分工作模式[2]。
TDICCD是基于對同一成像目標進行多次曝光的原理設計的[3]。成像目標與TDICCD是相對運動的,這樣,同一列多個像元隨著相對運動對同一目標在不同時刻進行多次曝光,同時將這些曝光產生的信號累加,從而達到在不降低分辨率的前提下增加靈敏度的目的[4-5]。
但在TDI的工作模式下,相機相對地面的移動速度需要和CCD的像元轉移速度相匹配,即用相應的時間將像元的能量從一級傳遞并累積到下一級[6]。對于同一種相機,軌道高度降低可以提高分辨率,但同時會引起TDICCD相機垂直轉移時鐘周期變短、模擬信號讀出頻率的提高,給TDICCD的驅動設計帶來新的挑戰。
而本文研究的多線陣集成TDICCD,在航天產品中逐漸開始應用,多線陣集成TDICCD在低軌工作時除了上述普通CCD遇到的問題,還需要考慮同一片CCD內不同線陣間驅動時鐘的相互影響。本文在分析多線陣集成TDICCD圖像傳感器低軌成像特點基礎上,提出了一種基于多線陣集成TDICCD在垂直轉移時間變短情況下的驅動方式并設計了多線陣集成TDICCD驅動時序,實驗驗證表明,該方法能夠解決不同線陣間的成像干擾問題,提高傳感器的成像品質。
1 主要指標及驅動原理
以一款典型的多線陣集成TDICCD為例,1個全色譜段為一條線陣,4個多光譜譜段為四條線陣,且4個多光譜譜段的電子學指標完全相同,其具體參數如表1。本文對此器件的研究內容可以擴展到絕大部分多線陣集成TDICCD。
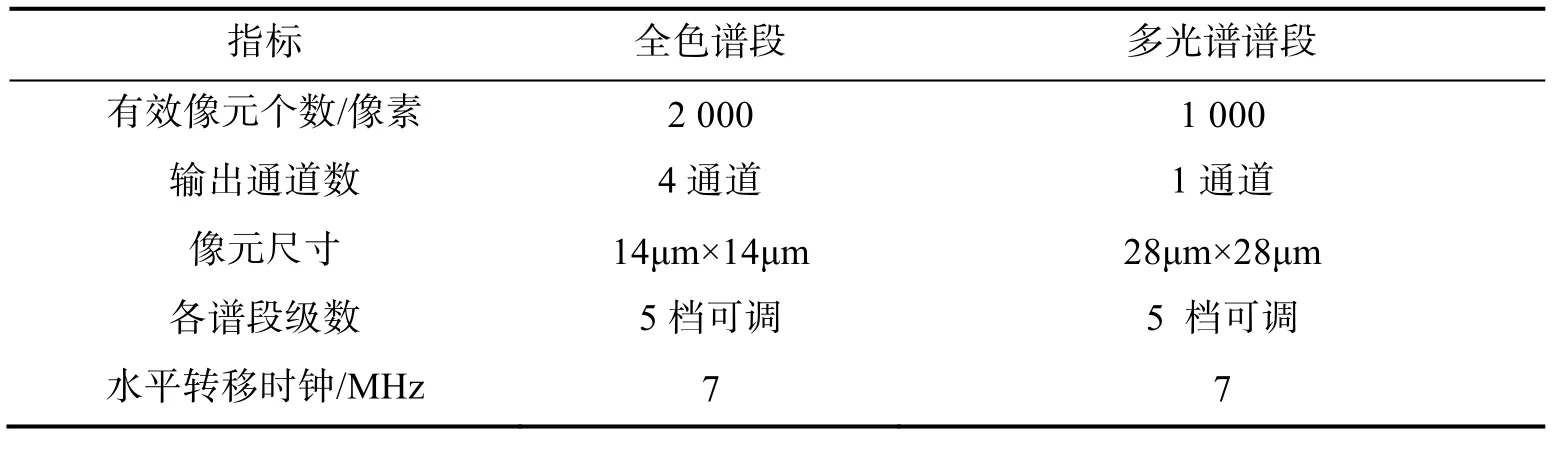
表1 多線陣TDICCD主要指標參數Tab.1 The main features of multi-linear TDICCD
案例中的CCD為四相轉移時鐘,轉移時序如圖1所示,H1~H4為四相轉移時鐘,其為高電平時,在器件內對應位置產生電勢能造出勢阱,可以存儲電荷。T0~T8為電荷完成轉移工作周期內的典型時間點,T0′~T8′為逆序轉移的時間點,如圖2所示。CCD發生光電轉換,在T0時刻,產生的電荷存儲在其對應的存儲區;在 T1時刻,H1變為高電平,則在此存儲區相鄰位置產生勢阱,電荷向相鄰存儲區移動;在 T2時刻,H3變為低電平,其對應位置勢阱消失,電荷向相鄰存儲區移動。四相轉移時鐘以圖1所示時序工作,直到T8時刻,電荷正好完成從成像對應存儲區到相鄰存儲區的轉移。
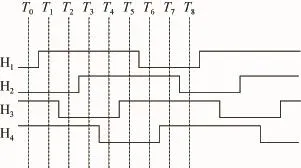
圖1 CCD水平轉移時鐘示意Fig.1 CCD horizontal transfer sequence
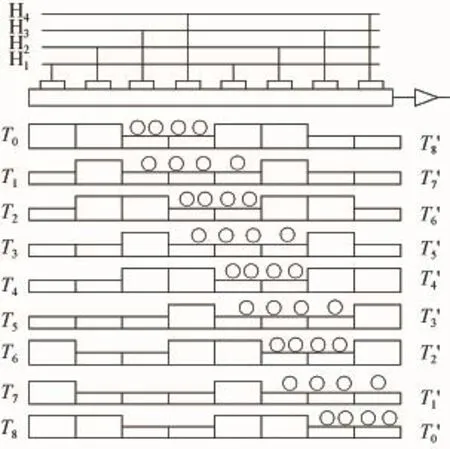
圖2 CCD電荷轉移示意Fig.2 CCD charge transfer
在TDI的工作模式下,要用相應的時間將像元的電荷從一級傳遞并累積到下一級,即每一行都要對同一景物成像然后累積,所以相機相對地面的移動速度需要和 CCD的像元轉移速度相匹配,則空間遙感相機的軌道高度決定了相機的垂直轉移時鐘周期[7-8]。且由于全色譜段和多光譜譜段的像元尺寸不同,決定了TDICCD的全色譜段線陣和多光譜譜段線陣的垂直轉移時鐘周期關系比為1∶2。
2 軌道高度對成像的影響
對于TDICCD空間遙感相機來說,影響其成像的主要因素包括相機焦距、探測器像元尺寸、讀出速率、軌道高度等[9-10]。軌道高度和最終成像圖像的分辨率密切相關,在其它因素不變的情況下,軌道越低則意味著能獲得越高分辨率的圖像。而多線陣集成TDICCD的不同譜段間的干擾程序和相機在軌的成像條件相關,主要是垂直轉移速率參數的變化。相機垂直轉移頻率變短時,多線陣間的像元垂直轉移時鐘和像元水平轉移時鐘會發生干擾,而TDICCD垂直轉移頻率和像元尺寸、讀出速率、分辨率、軌道高度等參數[11-12]相關,不考慮地球自轉,且相機垂直照到地面的情況下,相機垂直轉移頻率計算方法如下:

式中 F是地面像元分辨率;H是衛星軌道高度;a是像元尺寸;f是星載相機焦距。

式中 V為衛星運動速度;G為萬有引力常數;M為地球質量;R為地球半徑。

式中 Vt為投影地速。

式中 T為相機垂直轉移時鐘周期。
在本設計中相機為6m焦距,當軌道高度大于430km時,即在垂直轉移時鐘周期大于1 000(多光譜譜段像元數)個時鐘周期的情況下,此相機的多線陣集成TDICCD驅動方式和普通驅動方式無異,在全色譜段的一個垂直轉移時鐘周期內,可以把多光譜譜段的像元全部水平轉移完畢。
當軌道高度小于430km時,即在垂直轉移時鐘周期小于1 000(多光譜譜段像元數)個時鐘周期的情況下,在全色譜段的一個垂直轉移時鐘周期內,多光譜譜段的像元無法全部轉移完畢。多光譜譜段線陣的水平轉移時鐘會和全色譜段線陣的垂直轉移時鐘重疊,即如圖3所示,圖中V_P為全色譜段垂直轉移時鐘,H_P為全色譜段水平轉移時鐘,V_B為多光譜譜段垂直轉移時鐘,H_B為多光譜譜段水平轉移時鐘,H_P和H_B均為四項轉移時序,以一個時序簡圖表示H1到H4。4個多光譜譜段的時序關系完全相同,t1~t3為3個時間段。在t2時間段內,由于全色譜段正在進行垂直轉移,勢必對多光譜譜段的電信號產生干擾,其主要干擾方式為互感耦合。
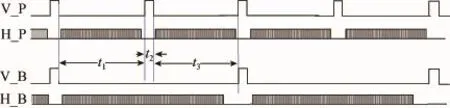
圖3 低軌成像時5個譜段垂直轉移時鐘和水平轉移時鐘對應關系Fig.3 The timing relationship of five–spectrum imaging on low earth orbit
將采用此種驅動方式的多線陣TDICCD相機置于積分球前,在軌道高度小于430km內選擇兩組不同垂直轉移時鐘周期進行成像,并將成像數據進行對比分析,會發現4個多光譜譜段的數據如圖4所示。圖4(a)為垂直轉移時鐘周期較短時測得的多光譜4個波段量化灰度值,干擾值出現在像元位置600~700之間,圖4(b)為垂直轉移時鐘周期較長時測得的多光譜4個波段量化灰度值,干擾值出現在像元位置800~900之間。通過分析可以看出,全色譜段的垂直轉移時鐘信號對多光譜譜段的成像品質有影響,而且不同的垂直轉移時鐘周期,對應的受影響像元位置也在變化。
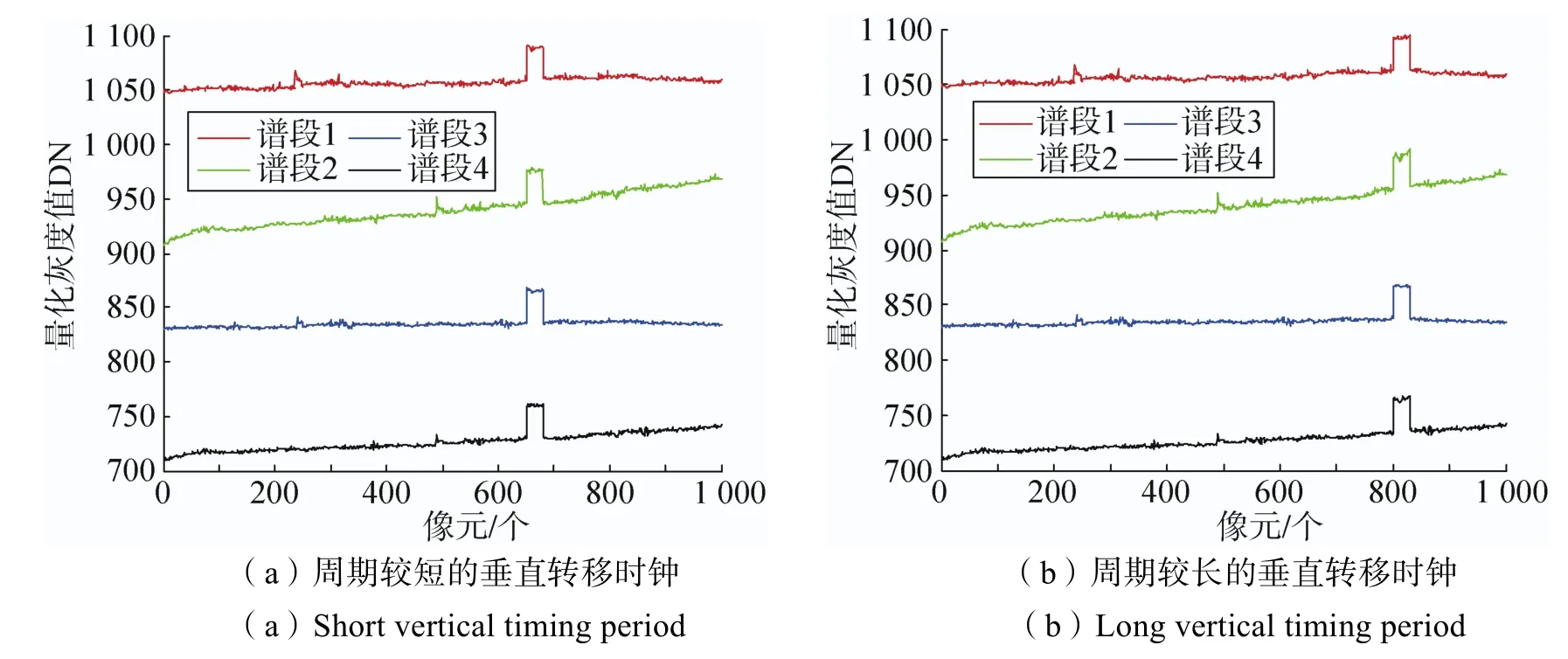
圖4 低軌工作時多光譜譜段成像干擾示意Fig.4 The image interference of multispectral imaging on low earth orbit
由此可知對于多線陣集成TDICCD空間遙感相機在低軌運行時,常規的驅動方式下多光譜譜段成像品質會受到全色譜段的垂直轉移時鐘的影響,且受影響像元隨著垂直轉移時鐘周期的變化而變化,從而導致圖像品質受影響較大,無法進行像元輻射校正。
3 驅動方案設計
3.1 系統方案
由于多線陣集成TDICCD相機在低軌運行時,多光譜譜段成像品質會受到全色譜段的垂直轉移時鐘的影響,因此本文提出了低軌成像驅動方案。
本設計的系統框圖如圖5所示,時序控制電路使用晶振和現場可編程門陣列(FPGA)產生工作所需時序,經過驅動芯片及箝位后,得到CCD所需驅動信號,驅動多線陣TDICCD工作,產生模擬視頻信號;經過濾波之后,將模擬信號進行箝位、放大、相關雙采樣,再經過A/D變換處理,得到量化后的數字視頻信號;然后按指定格式進行格式轉換,再通過接口電路輸出給圖像采集設備。另外,通過供電及控制設備發送指令,實現對垂直轉移時鐘周期、TDI級數、視頻信號增益的調整功能。
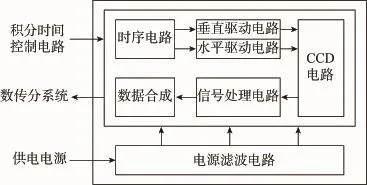
圖5 多線陣集成TDICCD成像電路系統組成Fig.5 Multi-linear TDICCD imaging circuit system
在具體設計中,還需注意系統的電磁兼容性,需使用多層電路板,控制好模數混合板的分區及走線;模擬信號使用同軸電纜傳輸;高速數字信號使用差分雙絞屏蔽線;驅動時序設計用FPGA實現,用VHDL語言編程[13-15]。該時序采用自頂向下的結構化、模塊化設計方法,把整個程序劃分為功能獨立的各個子模塊,在頂層完成各個子模塊的調用,便于維護。對驅動時序程序進行功能和時序仿真驗證,仿真結果表明該設計時序功能和性能滿足器件的使用要求。
3.2 水平轉移時鐘分段時序設計
避免軌道高度降低帶來的圖像干擾的方法是在時序電路內增加多光譜譜段的分段時序設計,使多光譜譜段水平轉移時鐘避開全色譜段垂直轉移時鐘,在時間上不存在交疊。具體時序如圖6所示,全色譜段垂直轉移時鐘工作時,多光譜譜段水平信號保持不變,待全色垂直轉移時鐘工作完后,多光譜譜段水平轉移時鐘再進行工作。這樣,多光譜譜段讀出信號時避免了全色譜段像元垂直轉移帶來的干擾。

圖6 多光譜譜段分段水平轉移時鐘Fig.6 Multispectral horizontal transfer sequence
但多光譜譜段的驅動時序分段后,在t1時間段的最后一個像元和t3時間段第一個輸出的像元,其靠近放大輸出電路的唯一寄存器會受到全色譜段垂直轉移時鐘本身的影響,而引入串擾,如圖7實測結果所示。圖7(a)為垂直轉移時鐘周期較短時測得的多光譜4個波段量化灰度值,干擾值出現在像元位置600附近,圖7(b)為垂直轉移時鐘周期較長時測得的多光譜4個波段量化灰度值,干擾值出現在像元位置800~900之間。通過分析可以看出,4個譜段在均勻光下,在水平驅動的分段位置都會有串擾過沖,而且也會隨著垂直轉移時鐘周期的變化而變化位置,導致圖像受影響較大,且無法進行像元輻射校正。
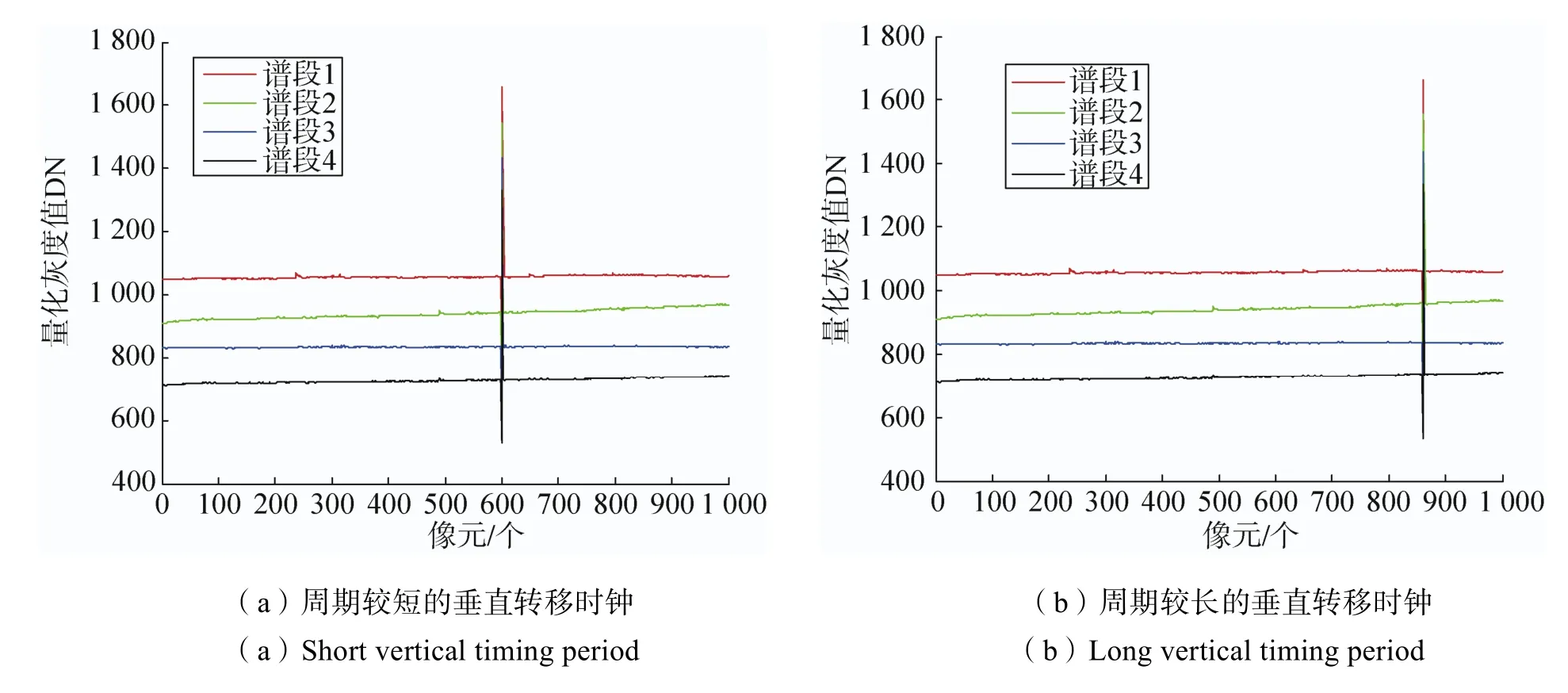
圖7 多光譜譜段分段水平轉移的成像干擾實測示意Fig.7 Multispectral horizontal transfer image interference test result
3.3 逆向水平轉移時鐘設計
為避免轉移邊緣干擾,多光譜譜段需要在分段水平轉移時鐘的基礎上增加逆向水平轉移時鐘設計,其時序關系如圖8所示,其電荷e轉移示意如圖2所示,電荷在T0′到T8′的時間內發生逆向轉移。使用此方法讓多光譜譜段水平驅動信號避開全色譜段垂直轉移時鐘,在時間上不存在交疊,即如圖9所示,寄存器內正向轉移n個像元后,全色垂直轉移時鐘到來之前,多光譜譜段的水平轉移時鐘由圖1的順序轉移變化為圖8所示的逆向轉移時序,使得電荷逆向轉移3~5個像元,避免此時刻邊緣寄存器內的像元受到干擾。全色譜段垂直轉移時鐘工作時,多光譜譜段水平信號保持不轉移電荷狀態,待全色垂直轉移時鐘工作完后,多光譜譜段水平信號再進行正向電荷轉移工作。這樣,多光譜譜段讀出信號時避免了全色譜段垂直轉移時鐘的干擾。
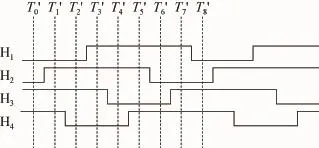
圖8 逆向水平轉移時鐘示意Fig.8 Reverse horizontal charge transfer sequence

圖9 逆向水平轉移電荷移動示意Fig.9 Reverse horizontal charge transfer
針對低軌成像時,多線陣集成TDICCD相機各譜段間會有不可輻射校正的成像干擾,在本方案中,采用分段水平轉移時鐘,并在此基礎上增加一段逆向水平轉移時鐘設計,最終完成的成像驅動設計,其結果能完全避免多線陣集成TDICCD的不同譜段間的成像信號干擾,能夠得到最優的成像品質。
4 測試及驗證
在實驗室搭建測試系統,如圖10所示,在多線陣集成TDICCD成像系統上安裝鏡頭;鏡頭前安裝景物模擬器,可選景物或均勻光輸出;并在外圍搭建相應的控制及供電系統給成像系統供電和發送控制指令,并能夠調整系統的垂直轉移時鐘周期,模擬低軌工作情況;搭建圖像采集及評價系統對成像系統的數據進行采集和處理。
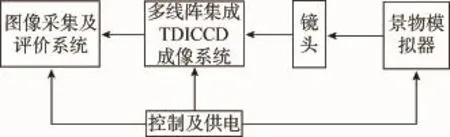
圖10 多線陣集成TDICCD成像測試系統Fig.10 Multi-linear array TDICCD test system
對系統中所需的時序關系進行FPGA程序編程并進行仿真,在全色譜段的垂直轉移時鐘V_P到來之前3個時鐘周期,如圖11所示的T0′時刻,多光譜譜段的水平轉移時鐘H1到H4產生逆向轉移時序,在全色譜段的垂直轉移時鐘V_P工作完成后,多光譜譜段的水平轉移時鐘恢復正向轉移時序,滿足本系統設計的多線陣集成TDICCD的驅動時序要求。
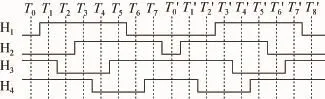
圖11 多光譜譜段正向到逆向水平轉移時鐘圖Fig.11 Multispectral horizontal drive and reverse drive clock
使用此方法完成的成像驅動設計,其結果能將多線陣集成TDICCD的不同譜段間的成像信號干擾降到最低,獲得最高成像品質,圖12是使用圖像采集設備測得均勻光的成像圖,4個多光譜譜段的圖像在低軌工作模式下穩定無干擾,經過像元輻射校正后可以得到良好的成像。
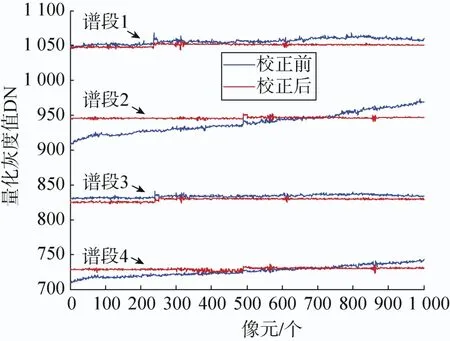
圖12 多光譜譜段低軌成像校正前后對比Fig.12 The value of multispectral pixels contrasting before and after correction
使用該設計的多線陣TDICCD已成功應用于某試驗相機的成像試驗,該相機在低軌工作拍攝到的圖像如圖13所示。從圖像可以看出,在本時序驅動下,相機成像工作狀態穩定,成像品質良好,完全消除了圖4和圖7中的成像干擾,得到了很好的驗證。

圖13 星上系統成像Fig.13 Sensing imaging
5 結束語
綜上研究結果,對于多線陣集成TDICCD在低軌運行的時候,要注意不同線陣間垂直轉移時鐘周期不同帶來的成像干擾,如果無法保證不同的線陣間垂直轉移時鐘周期相同,則在設計時需要充分考慮相關因素,通過使用本文提到的逆向水平轉移來避讓干擾,從而獲得良好的成像。
References)
[1]楊秀彬, 姜麗, 金光. 軌道末期星載相機側擺成像匹配分析與實驗[J]. 空間科學學報, 2013, 33(3): 337-345. YANG Xiubin, JIANG Li, JIN Guang. Image Matching Analysis and Experiment of Spaceborne Camera Swayed in the End of Orbit Life [J]. Chinese Journal of Space Science, 2013, 33(3): 337-345. (in Chinese)
[2]馬天波, 郭永飛, 李云飛. 科學級TDICCD相機的行頻精度[J]. 光學精密工程, 2010, 18(9): 2028-2035. MA Tianbo, GUO Yongfei, LI Yunfei. Precision of Row Frequency of Scientific Grade TDICCD Camera [J]. Optics and Precision Engineering, 2010, 18(9): 2028-2035. (in Chinese)
[3]徐正平, 翟林培, 葛文奇, 等. 亞像元的CCD幾何超分辨方法[J]. 光學精密工程, 2008, 16(2): 2448-2452. XU Zhengping, ZHAI Linpei, GE Wenqi, et al. CCD Geometric Superresolution Method based on Subpixel [J]. Optics and Precision Engineering, 2008, 16(2): 2448-2452. (in Chinese)
[4]首峰, 劉全國, 阮錦, 等. 推帚式TDICCD相機應用分析[J]. 系統工程與電子技術, 2001, 23(1): 33-37. SHOU Feng, LIU Quanguo, RUAN Jin, et al. An Analysis for Application Technique of Push-broom TDICCD Imaging Camera [J]. Chinese Journal of Nosocomiology Systems Engineering and Electeonics, 2001, 23(1): 33-37. (in Chinese)
[5]蔣光偉. TDICCD的空間分辨率特性[J]. 紅外, 2001, 12(9): 17-21. JIANG Guangwei. The Spatial Resolution Characteristic of TDICCD [J]. Infrared, 2001, 12(9): 17-21. (in Chinese)
[6]王棟,韓志學,翟國芳. 32通道TDICCD遙感相機模擬前端電路設計[J]. 航天返回與遙感, 2015, 36(1): 49-51. WANG Dong, HAN Zhixue, ZHAI Guofang. Design of Analog Front End Circuit for TDICCD Remote Sensing Camera with 32 Channel Output Signal [J]. Spacecraft Recovery & Remote Sensing, 2015, 36(1): 49-51. (in Chinese)
[7]萬旻, 李濤. TDICCD時序設計在FPGA中的工程實現[J]. 航天返回與遙感, 2006, 27(3): 34-40. WAN Min, LI Tao. A Kind of FPGA Engineering Realization of TDICCD Timing Design [J]. Spacecraft Recovery & Remote Sensing, 2006, 27(3): 34-40. (in Chinese)
[8]黃鑫, 阮錦, 曲洪豐, 等. TDICCD高速驅動電路仿真設計與實現[J]. 計算機仿真, 2008, 25(9): 300-303. HUANG Xin, RUAN Jin, QU Hongfeng, et al. Simulation and Implementation of High Speed Driving Circuit for TDICCD [J]. Computer Simulation, 2008, 25(9): 300-303. (in Chinese)
[9]楊博雄, 傅輝清, 陳志高, 等. 一種線陣CCD時序仿真新方法[J]. 大地測量與地球動力學, 2004, 24(3): 124-127. YANG Boxiong, FU Huiqing, CHEN Zhigao, et al. A New Method of Linear CCD Time Sequence and Simulation [J]. Jorunal of Geodesy and Geodynamics, 2004, 24(3): 124-127. (in Chinese)
[10]董建婷, 董杰. 高速幀轉移型面陣CCD器件的時序設計[J]. 航天返回與遙感, 2009, 30(1): 58-62. DONG Jianting, DONG Jie. Timing Design for High-speed Frame Transfer CCD [J]. Spacecraft Recovery and Remote Sensing, 2009, 30(1): 58-62. (in Chinese)
[11]李華. CCD時序與基于時分復用的實時數據處理系統[J]. 電視技術, 2012, 36(19): 71-74. LI Hua. Design of CCD Timing Generator and Real-time Data Processing System Based on Time-division Multiplexing [J]. Video Engineering, 2012, 36(19): 71-74. (in Chinese)
[12]劉燕, 高偉, 陳楚君, 等. 基于FPGA的TDI-CCD時序電路設計[J]. 現代電子技術, 2010, 33(4): 180-182. LIU Yan, GAO Wei, CHEN Chujun, et al. Design of TDI-CCD Driving Circuit Based on FPGA [J]. Modern Electronics Technique, 2010, 33(4): 180-182. (in Chinese)
[13]冉曉強, 汶德勝, 鄭培云, 等. 基于 CPLD的空間面陣 CCD相機驅動時序發生器的設計與硬件實現[J]. 光子學報, 2007, 36(2): 365-367. RAN Xiaoqiang, WEN Desheng, ZHENG Peiyun,et al. Designing on Driving Schedule Generator for Space Array CCD Camera and Hardware Based on CPLD [J]. Acta Photonica Sinca, 2007, 36(2): 365-367. (in Chinese)
[14]王巖, 郭永飛, 司國良, 等. 基于FPGA的TDI-CCD時序電路的設計[J]. 微計算機信息, 2007, 23(8): 198-199. WANG Yan, GUO Yongfei, SI Guoliang, et al. The Design of Timing Generation of TDI-CCD Based on FPGA [J]. Control & Automation, 2007, 23(8): 198-199. (in Chinese)
[15]許濤, 張振海, 石志國, 等. 高分辨高靈敏度 CCD圖像傳感器驅動時序設計[J]. 計算機測量與控制, 2015, 23(3): 1048-1051. XU Tao, ZHANG Zhenhai, SHI Zhiguo, et al. Research of Driving Schedule Generator for High Resolution & High Sensitivity CCD Image Sensor Based on FPGA[J]. Computer Measurement & Control, 2015, 23(3): 1048-1051. (in Chinese)
[16]胡社教, 余升, 張錚, 等. 基于FPGA的全幀紫外CCD驅動時序設計[J]. 合肥工業大學學報(自然科學版), 2012, 35(8): 1030-1032. HU Shejiao, YU Sheng, ZHANG Zheng. Design of Driving Timing for Full-frame UV-CCD Based on FPGA [J]. Journal of Hefei University of Technology(Natural Science), 2012, 35(8): 1030-1032. (in Chinese)
[17]韓軍, 楊少華, 尚小燕. 基于FPGA的面陣CCD驅動時序設計[J]. 光學儀器, 2014, 36(1): 68-71. HAN Jun, YANG Shaohua, SHANG Xiaoyan. The Design of Drive Timing Generation of Array CCD Based on FPGA [J]. Optical Instruments, 2014, 36(1): 68-71. (in Chinese)
[18]鄭小龍, 姚大志, 華園園, 等. 高速拼接CCD相機時序設計[J]. 光電子技術, 2014, 34(3): 211-212. ZHENG Xiaolong, YAO Dazhi, HUA Yuanyuan, et al. Timing Design of High-speed Mosaic CCD Camera [J]. Optoelectronic Technology, 2014, 34(3): 211-212. (in Chinese)
Driving Method of Low Earth Orbit Imaging Based on Multi-linear TDICCD
LI Qiang FAN Ben CHEN Xi
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Along with the user’s growing requirements for multispectrum of earth observing camera and the improved capability of chip integration, multi-linear array time delayed integration(TDI) charge-coupled device(CCD) has been widely used in space products. This paper analyzes the imaging characteristics of multi-linear TDICCD sensor when imaging from low earth orbit, and puts forward a driving method based on multi-linear TDICCD under the condition of shorter row transfer time. By adopting FPGA as the hardware processing platform and using the very-high-speed-integrated-circuit hardware description language(VHDL), a driving sequence for the multi-linear TDICCD is designed, which can work correctly and meet the requirement based on software simulation and hardware imaging test. Finally, based on the result of the analysis of imaging pictures, the design drives sensor to work normally and can repress imaging interference between different linear arrays to improve the quality of imaging.
multi-linear integration, time delayed integration charge-coupled device(TDICCD), vertical drive clock, orbit altitude, space remote sensing camera
V474
A
1009-8518(2016)01-0032-09
10.3969/j.issn.1009-8518.2016.01.004
李強,男,1981年生,2003年獲哈爾濱工業大學電氣工程及自動化專業學士學位,高級工程師。研究方向為視頻電子學。E-mail:lqcast@sina.com。
(編輯:陳艷霞)
2015-11-30
國家重大科技專項工程
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年12期)2019-05-21 02:55:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
學苑創造·A版(2015年11期)2016-01-14 09:03:27
中國火炬(2010年8期)2010-07-25 11:34:30