基于Lifemod仿真的鞍馬全旋多體動力學模型研究
2016-02-05 06:14:11蘇楊
體育世界(學術版) 2016年6期
蘇楊
?
基于Lifemod仿真的鞍馬全旋多體動力學模型研究
蘇楊
鞍馬是我國男子體操的傳統優勢項目,鞍馬全旋(DLC)是該項目的典型和核心動作,也是規則規定必須完成的“規定動作”。運動員要在鞍馬全旋上達到高水平,不僅訓練周期很長,還要不斷地糾錯、枯燥地重復“規定動作”以及克服傷病干擾,以實現肌肉工作時的協同效應和“自動化”。從運動生物力學的角度對鞍馬全旋動作的肌肉工作機制進行定量描述尚無報道。采用多體系統動力學仿真軟件Lifemod對該動作進行建模仿真,驗證了重心和足在水平面基本作圓周運動是其良好技術水平的體現;并首次揭示了背闊肌在鞍馬全旋運動中是主要的動力來源,胸大肌在進行軀干遠固定的同時,肱二頭肌和肱三頭肌協同工作起到支撐作用;三角肌起固定肩關節作用。為精細和準確的訓練提供了可定量化的初步依據。
鞍馬全旋;多體動力學模型;Lifemod仿真
1. 前言
“鞍馬全旋”是男子體操競技的“王牌動作”,不僅出現在鞍馬項目的比賽中,還出現在自由體操、技巧等平面場地的比賽中,其動作變種正日益廣泛地被應用于各種身體藝術表演之中(如空中瑜伽、鋼管舞、啦啦操等)。查閱1980年代以來的體育科技文獻發現,這樣一個具有高沖擊力視覺效果、被廣泛應用的“體操招牌動作”至今尚沒有得到精細的定量描述,其技能學習和訓練的過程依然處于“暗箱摸索”的狀態。近年來,多體系統動力學理論的不斷發展,為復雜系統的機構設計、分析,以及優化提供了有力支持,也為體育運動技術的研究開辟了新的途徑[1]。隨著多體系統動力學理論的發展和計算機的普及,通過建立多體動力學模型進行人體動態模擬方法越來越多地運用于體操、跳水等技術性競技項目的研究和訓練實踐。Sp?gele等(1999) 為了進一步模擬仿真人體跳躍運動建立了人體前臂的多體動力學模型[2]。Wilson 等(2007)為一名優秀男跳高運動員量身定做了8環節多剛體模型,并計算其中5個關節處的屈伸力矩[3]。目前國內外較為先進的針對人體運動建模仿真的軟件是多體動力學數字仿真軟件Lifemod。Lifemod是在 MSC.ADAMS (機械系統動力學仿真分析軟件)基礎上進行的二次開發,用以研究人體生物力學特征的數字仿真軟件。宋紅方、張緒樹等曾運用ADAMS 仿真軟件建立上肢的運動模型[4]。以上人體運動的多體系統動力學的建模研究,其人體模型動力控制和計算只能量化到關節力矩,達不到肌肉力量層面。Lifemod作為一種新興的方法已逐漸應用于不同的研究領域。在過去的研究中,雖有一小部分涉及鞍馬全旋動作(Baudry et al.2006)[5],但本研究以多體動力學數字仿真軟件Lifemod為平臺直觀的建立鞍馬全旋動作的人體骨骼肌肉模型,不僅可以更深入、更經濟、更準確地把握鞍馬全旋動作中動力學的問題,而且可以獲取肌肉力量等以往任何其他模型所達不到的層次。
2. 研究對象
本研究屬于“新方法應用的可行性及其應用后指導實踐的價值潛力的探索性研究”,故不能進行大樣本的測試。以一名江蘇省體操隊現役運動健將為測試對象,訓練年限16y,年齡20y,身高162cm,體重57kg。
3. 研究設備
首先使用美國Motion Analysis紅外動作捕捉系統硬件設備和相應的軟件workstation 5.0進行運動動作資料采集;其次使用多體動力學數字仿真軟件Lifemod建構人體模型。
4. 研究方法和步驟
本研究流程主要是:
4.1 為硬體校正:靜態校正(定義空間坐標系統)、動態校正(定義攝影機在空間坐標的位置);
4.2 將受試者貼上反光球,見圖1;
4.3 電腦模擬,見圖2。
其模擬流程第一步驟利用Lifemod的功能,將受試者基本參數輸入構建人體模型;
第二步創建運動引導點并導入運動捕捉的數據(motion capture data);
第三步進行平衡分析,使仿真分析過程中運動引導點固定能夠在初始位置上;
第四步進行反向動力學分析,模型在運動引導點的控制下運動,運動引導點的運動是動作捕捉數據或者用戶輸入的曲線數據。關節會先記錄下模型在運動引導點的控制下運動時關節角度的變化情況 (或者肌肉的長度變化過程被記錄下來);
第五步進行正向動力學分析,肌肉按照記錄下的肌肉長度變化過程作為主動激勵角色去驅動運動,使模型再次執行該動作;
第六步,模擬結束后將運動員在做鞍馬全旋運動中的運動學參數和動力學參數用圖表的形式展示。

圖1 lifemod中反光球(marker點)位置圖
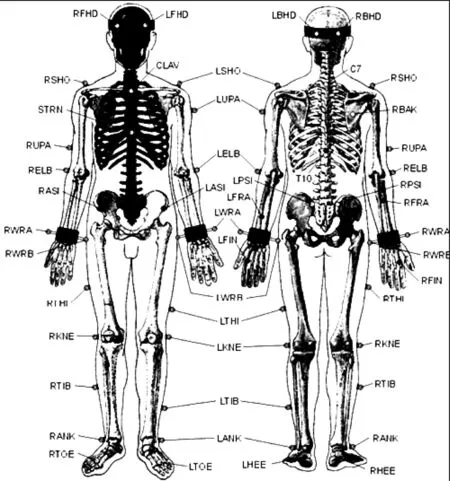
圖2 lifemod模擬仿真流程圖
5. 結果與分析
5.1 重心位置變化分析
圖3是人體模型進行仿真后重心位置在各方向的變化曲線圖,X方向為人體矢狀軸方向,Y方向為人體冠狀軸方向,Z方向為人體垂直軸方向。由此可計算重心軌跡在各方向上的投影直徑,見表1。
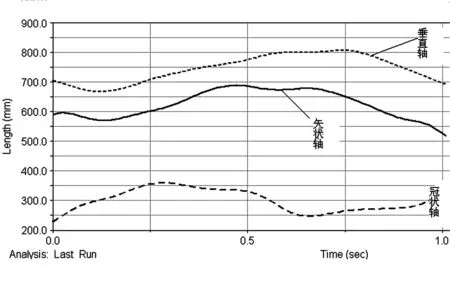
圖3 lifemod模型仿真重心位置在各方向的變化圖

冠狀軸方向矢狀軸方向垂直軸方向Lifemod模型0.130.140.17
5.2 足位置變化分析

圖4 lifemod模型仿真足位置在各方向的變化圖
圖4是人體模型進行仿真后重心位置在各方向的變化曲線圖,X方向為人體矢狀軸方向,Y方向為人體冠狀軸方向,Z方向為人體垂直軸方向。由此可計算重心軌跡在各方向上的投影直徑,見表2。

表2 足軌跡投影在各方向的投影直徑 (m)
綜合比較表1,表2可見:無論是重心軌跡還是足軌跡,其在冠狀軸方向和矢狀軸方向的投影直徑均差距較小。說明重心和足在水平面基本作圓周運動,驗證了劉延柱老師描述的鞍馬全旋的理想運動[12]。進一步證明了在鞍馬全旋中重心和足軌跡投影到水平面的曲線越接近圓,動作技術水平越高,這是影響動作好壞的重要因素。
5.3 各骨骼肌肌張力總體趨勢分析
圖5是模型在鞍馬全旋一周后所得左側骨骼肌肌張力變化曲線圖。圖6是模型在鞍馬全旋一周后所得右側骨骼肌肌張力變化曲線圖。圖中4條藍色豎線分別表示鞍馬全旋動作一周的4個階段的時間分界點(雙臂正撐階段-單臂支撐階段-雙臂反撐階段-單臂支撐階段)。由圖5可見,左側肌張力峰值由大到小:肱三頭肌>背闊肌>胸大肌>三角肌>肱二頭肌。由圖6可見,右側肌張力峰值由大到小:肱三頭肌>背闊肌>三角肌(胸大肌)>肱二頭肌。
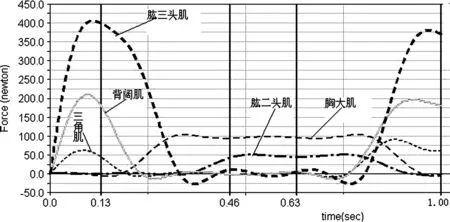
圖5 lifemod模型仿真鞍馬全旋一周左側骨骼肌肌張力圖
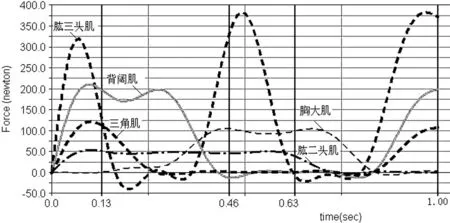
圖6 lifemod模型仿真鞍馬全旋一周右側骨骼肌肌張力圖
對比兩圖看出:模型左右肌肉力量對比的趨勢基本一致。其中:
5.3.1 左肱三頭肌力量最大峰達405.6N,右肱三頭肌力量最大峰達382.2N。左右肱三頭肌力量峰值均居同側骨骼肌力量的首位,與本研究第二部分同步實測肌肉數據對比結果一致;
5.3.2 胸大肌和肱二頭肌持續發力時間較長。左肱二頭肌發力時間為0.32s,右肱二頭肌發力時間為0.53s;左胸大肌發力時間為0.49 s,右胸大肌發力時間為0.29 s;
5.3.3 左胸大肌持續發力時間明顯長于右胸大肌,與本研究第二部分同步實測肌肉數據對比結果一致;
5.3.4 左右三角肌發力趨勢基本一致, T1階段左三角肌的三個頭強烈收縮,其肌肉力量輸出百分比達到峰值,主要起到固定肩關節的作用,隨后逐漸減弱,到T4階段又逐漸增大,為下一循環做好準備。
5.3.5 右背闊和肱三頭肌在T1、T4階段明顯有發力潛伏期,為進入下一循環的加速階段作準備。
從兩圖中可見鞍馬全旋一周4個階段中骨骼肌發力情況:T1階段雙手支撐階段,主要是肱三頭肌、背闊肌、三角肌發力;T2階段左臂支撐階段,左胸大肌、右背闊肌、右胸大肌發力;T3階段雙手反撐階段,左右胸大肌及左右肱二頭肌持續發力,同時右肱三再次發力;T4階段右臂支撐階段,與第1階段類似,肱三頭肌、背闊肌、三角肌再次發力。
6. 討論與建議
鞍馬全旋運動(DLC)對于提高鞍馬項目的穩定性具有決定性意義。由于動作的復雜性,對DLC研究的文獻相對稀少。Grassi等研究了DLC中腳踝的軌跡,發現腳和踝關節以近圓形方式移動[6]。Fujihara在水平面研究了質心的運動速度變化[7][8]。在對一般運動員和優秀運動員DLC動作的對比研究中,Baudry等發現足部動作的差異較髖關節和肩關節更顯著[9]。之前的研究已經表明,肩、髖關節和腳踝的運動軌跡影響DLC運動的穩定性[6-10]。完成任何一個體操動作都不是一次簡單的肌肉作功,需要許多骨骼肌的參與和協調。根據動作的要求,在時間上不同的時段由多組肌肉群收縮與放松交替轉換,發力時間長短相接,按照時間上的排列順序由多組肌肉群協調傳遞持續作功完成的。控制某些肌肉的最大力量輸出的時機,同時保持其他肌群肌力的持續輸出是至關重要的。因此,運動員需要了解肌肉收縮和協調的機制。雖然計算機建模和仿真已廣泛應用于人體肌肉力量和運動的研究[11],但鞍馬DLC運動研究采用的實驗方法仍主要局限于運動學。劉延柱從經典力學觀點出發,建立人體的理想化多剛體模型分析鞍馬上的直體全旋及托馬斯全旋的運動規律[12]。本研究探索建立DLC的Lifemod多體動力學粘彈性體模型,重點探究各運動階段的主要肌肉群的特點,并確定其協同工作機制,這是多剛體模型所達不到的。在Lifemod模型中,肱三頭肌和肱二頭肌,背闊肌與胸大肌在DLC運動周期中顯示拮抗模式。肱三頭肌的肌力峰值為所有測試肌肉中輸出最高的。胸大肌和肱二頭肌力量輸出較為平緩,但時間較長。這些結果進一步幫助運動員認識運動規律,并提供肌肉力量訓練的具體指導。
在雙臂正撐階段(T1),左臂推,而左肩保持在伸的位置,內旋外展。與此同時,右肩關節內收外旋,并且向下曲推鞍馬。肱三頭肌、背闊肌和三角肌肌力輸出達到第一個峰值。背闊肌積極收縮提供DLC的動力,同時,肱三頭肌及肱二頭肌協同工作起支撐作用,三角肌發力以穩定肩關節。
在左臂單撐階段(T2),左肩關節外展內旋,而右肩關節內收積極抓環,以防止由于慣性影響做離心運動。同時胸大肌在整個階段持續收縮。
在雙臂反撐階段(T3),右肩關節內旋并保持外展,左手及時推馬。該模型顯示,雙側的胸大肌和肱二頭肌呈持續發力狀態,右肱三頭肌和肱二頭肌再次協同工作。
在右臂單撐階段(T4),右臂外展內旋,而左肩關節內收抓環。該模擬結果表明,肱三頭肌、背闊肌和三角肌肌力輸出達到第二個峰值。
總之,結合模型可初步推測:背闊肌在鞍馬全旋動作的轉動過程中是主要的動力來源;胸大肌在進行軀干遠固定的同時,肱二頭肌和肱三頭肌協同工作起到支撐作用;三角肌起固定肩關節作用。
針對該項目不同肌群的工作特點可加強不同類型的肌肉訓練,以更加有效的提高肌肉力量和運動能力。國內外已有的研究表明,短期和長期的振動訓練可以提高關節肌肉最大力量、快速力量和運動能力[13-15]。常規力量訓練中附加全身的振動刺激將更能有效地提高DLC中肱三頭肌、背闊肌等的快速力量,并且能夠使屈伸肌群的快慢速肌力得到同時協調的發展。除傳統的杠鈴力量訓練法,電刺激力量訓練法及等速訓練是提高DLC中肱二頭肌、胸大肌等肌肉耐力力量的一種高效手段。
7. 總結
綜上所述,本研究開創性的建立了鞍馬全旋多體動力學Lifemod模型,運用此模型至少可以改進以下訓練指導的工作:
7.1 有針對性地糾正DLC訓練期間的技術錯誤,提高訓練效率,快速實現運動員鞍馬全旋動作的穩定性;
7.2 為創編類似的“支撐性立體化全身動作”提供參照,并有望運用計算機模擬技術實現動作設計、動作診斷和動作改進的數字化;
7.3 lifemod軟件是對人體運動進行仿真和模擬運動的一個很好的工具。若能進一步調節肌肉的有關參數和關節的動態精度,對比優秀運動員和一般運動員,進行模型的最優化研究將更有助于探究DLC的運動技術規律;
7.4 運動生物力學的一個重要任務是精確地測量運動技術中的人體關節反力,目前大部分動力學方面的研究僅限于利用測力臺來測量地面反作用力,Fujihara設計了測試DLC中馬環與手接觸的反作用力儀器[8],本研究可進一步通過模型計算人體與馬環的接觸力,對關節動力學深入研究。這對于DLC等支撐項目的專項動作技術訓練具有重要的意義。
[1] 錢競光. 人體平面運動動作多體系統動力學計算機模擬設計系統軟件的研制[J]. 南京體育學院學報, 2006, 5(1): 1-9.
[2] T.Sp?gele,A.Kistner and A.Gollhofer. Modelling, simulation and optimisation of a human vertical jump[J].J.Biomech., 1999,32(5):521-30.
[3] MA.King,C.Wilson and MR.Yeadon.Evaluation of a torque-driven model of jumping for height [J].J.Appl.Biomech., 2006,22(4):264-74.
[4] 宋紅芳,張緒樹.人體上肢的ADAMS 建模及仿真[J].醫用生物力學,2002,17(4):240-243.
[5] L.Baudry,D.Leroy and D.Chollet.The effect of combined self- and expert-modelling on the performanceof the double leg circle on the pommel horse [J].Journal of Sports Sciences, 2006, 24(10):1055-1063.
[6] Grassi, G., Turci, M., Shirai, Y. F., Lovecchio, N., Sforza, C., and Ferrario, V. F. Body movements on the men's competition mushroom: a three dimensional analysis of circular swings[J]. British Journal of Sports Medicine,2005,39 (8):489-492.
[7] Fujhara, T..Mechanical analysis in mechanism and technique of double leg circles on the pommel horse[J]. Japanese Journal of Biomechanics in Sports and Exercise,2006,10:27-41.
[8] Fujihara, T., Fuchimoto, T., and Gervais, P..Biomechanical analysis of circles on pommel horse[J]. Sports Biomechanics,2009,8 (1):22-38.
[9] Baudry, L., Seifert, L., and Leroy, D..Spatial consistency of circle on the pedagogic pommel horse: influence of expertise[J]. Journal of Strength and Conditioning Research,2008,22 (2):608-613.
[10] Baudry, L., Sforza, C., Leroy, D., Lovecchio, N., Gautier, G., and Thouvarecq, R..Amplitude variables of circle on the pedagogic pommel horse in gymnastics[J]. Journal of Strength and Conditioning Research.,2009,23 (3):705-711.
[11] Cheng, K. B. and Hubbard, M..Optimal compliant-surface jumping: a multi-segment model of springboard standing jumps[J].Journal of Biomechanics,2005,38 (9):1822-1829.
[12] 劉延柱.鞍馬全旋運動的動力學[J].力學學報,1985,20(3):243-249.
[13] 曾紀榮,王興澤.振動訓練時發展肌肉力量效果影響的實驗研究[J].北京體育大學學報,2007,30(10):1439—1441.
[14] BoSCo c,cARDINALE M,TsARPELAo.Innuence of vibration on mechamcal powerand electromyogram activity in human arm nexor muscles[J].Eur J Appl Physiol occupac Phvsi ol,1999A,79(4):306—311.
[15] ls sURIN VB,LIEBERMANN DG,TENENBAUM G.Effect of vibratorvstimulation training on maximal force and flexibiIity[J].J sportsci,1994,12(6):561—566.
江蘇省體操運動員科技攻關的運動生物力學研究(基金項目:BE2008687)。
蘇楊(1981.11-),女,江蘇常州人,研究方向:體育工程與體育統計,講師,南京體育學院運動健康科學系。
10.16730/j.cnki.61-1019/g8.2016.02.001
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
