基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的多AGV調(diào)度研究
2016-01-29 03:51:50唐敦兵陸曉春鄭堃
機械制造與自動化 2015年4期
唐敦兵,陸曉春,鄭堃
(南京航空航天大學(xué) 機電學(xué)院,江蘇 南京 210016)
基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的多AGV調(diào)度研究
唐敦兵,陸曉春,鄭堃
(南京航空航天大學(xué) 機電學(xué)院,江蘇 南京 210016)
摘要:為解決多AGV系統(tǒng)中的任務(wù)調(diào)度及協(xié)調(diào)控制問題,受神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的啟發(fā),結(jié)合混合區(qū)域控制模型,建立了任務(wù)、制造單元及AGV之間相互刺激的激素分泌模型,并在此基礎(chǔ)上提出了基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的多AGV任務(wù)分配及調(diào)度機制。結(jié)合實例進行了調(diào)度仿真實驗,驗證了此方法的可行性和有效性。
關(guān)鍵詞:多AGV;任務(wù)調(diào)度;協(xié)調(diào)控制;神經(jīng)-內(nèi)分泌協(xié)調(diào)機制;仿真實驗
Research on Multi-AGV Scheduling Based on Neuro-endocrine Coordination Mechanism
TANG Dunbing, LU Xiaochun, ZHENG Kun
(College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics
and Astronautics, Nanjing 210016, China)
Abstract:To solve the task scheduling and coordination problems in multi-AGV system, gaining enlightenment from the neure-endocrine coordination mechanism and combining the mixed regional control model, this paper build the hormone secretion model of the stimulation among task, manufacturing unit and AGV, then, proposes the multi-AGV task assignment and scheduling mechanism based on the neuro-endocrine coordination mechanism. The scheduling simulation experiments combined with specific examples are conducted and the feasibility and effectiveness of the proposed approach are verified.
Keywords:multi-AGV; task scheduling; coordination control; neuro-endocrine coordination mechanism; simulation
0引言
隨著現(xiàn)代制造系統(tǒng)的飛速發(fā)展,對制造系統(tǒng)的柔性和魯棒性提出了更高的要求[1]。自動導(dǎo)引小車系統(tǒng)(automated guided vehicle system, AGVS)作為現(xiàn)代制造系統(tǒng)中的關(guān)鍵子系統(tǒng),以其特有的高度靈活性、柔性和高效性等顯著特點,極大地提高了現(xiàn)在制造系統(tǒng)的生產(chǎn)效率、魯棒性,降低了生產(chǎn)成本等[2]。因此,國內(nèi)外眾多學(xué)者針對多AGV開展了大量研究,主要集中在以下三個方面:多AGV任務(wù)調(diào)度、多AGV路徑規(guī)劃及多AGV協(xié)調(diào)控制。任務(wù)調(diào)度是AGV的基本問題之一,主要解決在考慮當(dāng)前約束下加工任務(wù)在多臺AGV上的分配及組合優(yōu)化問題[3];路徑規(guī)劃主要解決在考慮當(dāng)前環(huán)境參數(shù)下,多AGV系統(tǒng)在得到新任務(wù)后,從任務(wù)起始點到任務(wù)目標(biāo)點的路徑問題;協(xié)調(diào)控制是多AGV系統(tǒng)的最關(guān)鍵問題,主要解決在實時運行時多臺AGV可能出現(xiàn)的碰撞、死鎖等問題[4]。
由于多AGV系統(tǒng)是一個實時并發(fā)的系統(tǒng),集中在線式的路徑規(guī)劃、協(xié)調(diào)控制存在運算時間長、控制滯后的問題,因此無法取得令人滿意的控制效果。
生物體在復(fù)雜動態(tài)環(huán)境下有著很強的適應(yīng)能力和應(yīng)變能力,能夠針對內(nèi)外界環(huán)境的變化迅速對自身相關(guān)功能活動進行協(xié)調(diào),達到新的動態(tài)平衡狀態(tài)。神經(jīng)-內(nèi)分泌協(xié)調(diào)機制作為維持生物體內(nèi)環(huán)境穩(wěn)態(tài)的重要生理機制,蘊含著豐富而復(fù)雜的分布式信息處理與協(xié)調(diào)機制,體現(xiàn)出高度的自適應(yīng)和自組織性[5]。因此,文中在深入研究神經(jīng)-內(nèi)分泌協(xié)調(diào)機制在生物體內(nèi)重要作用的基礎(chǔ)上,借鑒神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的優(yōu)秀特性,將之應(yīng)用于多AGV系統(tǒng)的任務(wù)調(diào)度、協(xié)調(diào)控制中,并開展了相應(yīng)仿真實驗。
1神經(jīng)-內(nèi)分泌協(xié)調(diào)機制
神經(jīng)系統(tǒng)是人體內(nèi)起主導(dǎo)作用的功能調(diào)節(jié)系統(tǒng),體內(nèi)各器官、系統(tǒng)的功能和各種生理過程等均受神經(jīng)系統(tǒng)的直接或間接調(diào)控,從而相互協(xié)調(diào),共同完成機體的各項功能活動。
內(nèi)分泌系統(tǒng)作為人體另一重要調(diào)節(jié)系統(tǒng),由內(nèi)分泌腺、內(nèi)分泌細胞及激素組成。內(nèi)分泌系統(tǒng)作為機體重要的調(diào)節(jié)系統(tǒng),通過分泌激素來調(diào)節(jié)體內(nèi)各組織器官的功能。
神經(jīng)系統(tǒng)和內(nèi)分泌系統(tǒng)存在著廣泛的聯(lián)系和相互作用。一方面,神經(jīng)系統(tǒng)接受機體內(nèi)外環(huán)境的各類刺激,將之轉(zhuǎn)化為神經(jīng)沖動,刺激內(nèi)分泌腺的激素分泌,對內(nèi)分泌系統(tǒng)有著調(diào)控作用;另一方面,內(nèi)分泌系統(tǒng)可以通過分泌激素改變神經(jīng)系統(tǒng)對特定刺激的敏感度,從而影響神經(jīng)系統(tǒng)的活動。
神經(jīng)系統(tǒng)對機體的調(diào)節(jié)主要通過神經(jīng)調(diào)節(jié)進行,神經(jīng)調(diào)節(jié)的結(jié)構(gòu)基礎(chǔ)是反射弧,反射弧中傳導(dǎo)的是電信號,因此神經(jīng)調(diào)節(jié)的最大特點是調(diào)節(jié)迅速。神經(jīng)沖動可以由反射弧直接傳導(dǎo)至效應(yīng)器,調(diào)節(jié)范圍準(zhǔn)確。神經(jīng)遞質(zhì)在起作用后立刻被分解,因此作用時間很短暫。內(nèi)分泌調(diào)節(jié)則是通過血液、組織液等內(nèi)分泌循環(huán)將激素、CO2等化學(xué)物質(zhì)運送至全身各處組織與器官,進而調(diào)節(jié)各項生理活動,因此內(nèi)分泌調(diào)節(jié)的速度相對緩慢。但全身組織、細胞只要由相應(yīng)的激素受體機體接受調(diào)控,調(diào)控范圍相當(dāng)廣泛;同時,激素在發(fā)揮作用后不會馬上消散,仍會存在一段時間,可以繼續(xù)對組織器官進行調(diào)節(jié),故內(nèi)分泌調(diào)節(jié)的作用時間較長。
神經(jīng)調(diào)節(jié)與內(nèi)分泌調(diào)節(jié)以其各自的特點,相互協(xié)調(diào)配合,在維持機體內(nèi)環(huán)境穩(wěn)態(tài)上發(fā)揮著重要作用。寒冷環(huán)境中機體體溫的恒定維持是神經(jīng)-內(nèi)分泌協(xié)調(diào)機制相互作用,維持內(nèi)環(huán)境穩(wěn)態(tài)的一個典型例子,具體過程如圖1所示。

圖1 寒冷環(huán)境中機體體溫恒定維持示意圖
下丘腦在感受到寒冷刺激后,可以直接調(diào)節(jié)骨骼肌、腎上腺等組織器官的活動,同時也能控制垂體等內(nèi)分泌腺的激素分泌,從而減少散熱,增加產(chǎn)熱,維持機體體溫恒定。
2多AGV調(diào)度系統(tǒng)建模
2.1混合區(qū)域控制模型
混合區(qū)域控制模型[6]基于傳統(tǒng)的串聯(lián)區(qū)域控制模型,針對其若干缺陷進行了改進,使其更適合于分布式控制。基于混合區(qū)域控制模型的多AGV調(diào)度系統(tǒng)路徑布局如圖2所示。
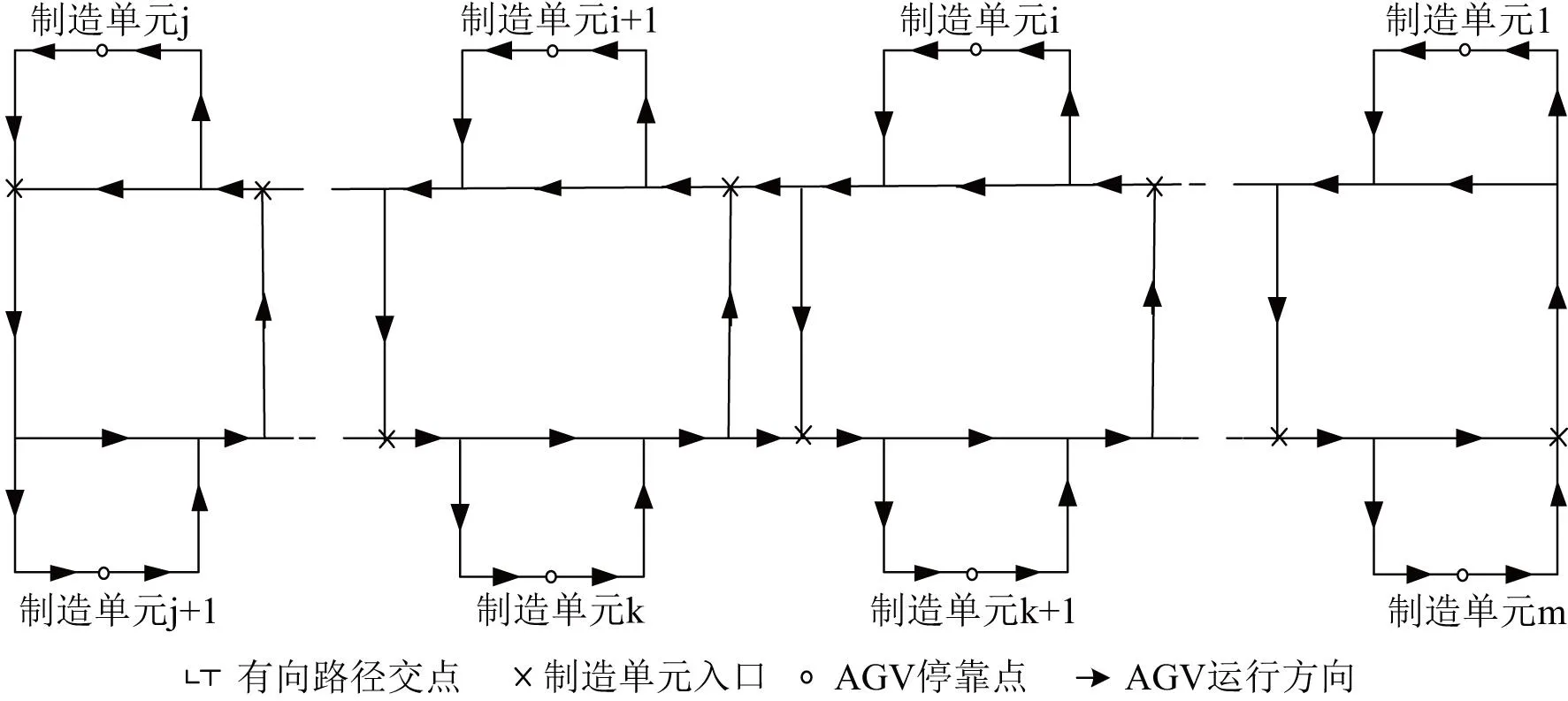
圖2 混合區(qū)域控制模型AGV路徑布局
混合區(qū)域控制模型中,多AGV調(diào)度系統(tǒng)由若干具有相同結(jié)構(gòu),獨立且緊密聯(lián)系的制造單元控制區(qū)域組成,AGV在各個區(qū)域之間的運行受各制造單元區(qū)域控制器控制,有利于發(fā)揮分布式控制的優(yōu)勢。
2.2激素調(diào)節(jié)規(guī)律
Farhy曾提出內(nèi)分泌激素通用調(diào)節(jié)規(guī)律[7]:激素的調(diào)節(jié)規(guī)律具有單調(diào)性和非負性,激素的上升及下降均遵循Hill函數(shù)規(guī)律,如式(1)及式(2)所示:
(1)
(2)
其中,G為函數(shù)自變量;T為閾值,且T>0;n為Hill系數(shù),且n≥1。如果激素A受激素B調(diào)控,則激素A的分泌速率SA與激素B的濃度CB存在以下關(guān)系:
SA(CB)=aFup(down)(CB)+SA0
(3)
其中,a為常量系數(shù),SA0為激素A的初始分泌速率。
2.3多AGV系統(tǒng)調(diào)度模型
根據(jù)激素調(diào)節(jié)規(guī)律對基于混合區(qū)域模型的多AGV調(diào)度系統(tǒng)進行建模。
多AGV調(diào)度系統(tǒng)中,新生產(chǎn)任務(wù)的到來對各制造單元產(chǎn)生刺激,制造單元根據(jù)生產(chǎn)任務(wù)中具體的工件工序、加工時間等信息按式(4)分泌制造單元激素,激素的濃度代表制造單元對某一工件工序的加工能力。
(4)

(5)
(6)
(7)
制造單元接受到系統(tǒng)中各AGV分泌的激素刺激后,選擇其中激素濃度最大的AGV來執(zhí)行本單元的工件運輸任務(wù),這樣就可以保證每次的工件運輸任務(wù)都由最佳的AGV來執(zhí)行,縮短了系統(tǒng)的總體運行時間,提高了系統(tǒng)的生產(chǎn)效率。
3基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的任務(wù)分配及調(diào)度機制
為了提高系統(tǒng)中各機床的利用效率、減少AGV的空閑等待時間,并提出基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的任務(wù)分配及調(diào)度機制,以提高系統(tǒng)的生產(chǎn)效率。
基于神經(jīng)-內(nèi)分泌的任務(wù)分配及調(diào)度機制主要解決生產(chǎn)任務(wù)在各個制造單元的分配、組合優(yōu)化以及各工件運輸任務(wù)在AGV上的分配問題,使系統(tǒng)能夠達到一個相對較優(yōu)的生產(chǎn)狀態(tài),維持在較高的生產(chǎn)水平。



5) 循環(huán)執(zhí)行步驟1)~4)直至所有工件工序得到分配,則停止對新生產(chǎn)任務(wù)的分配和調(diào)度,系統(tǒng)繼續(xù)運行。
采用此任務(wù)分配及調(diào)度機制,可以在生產(chǎn)任務(wù)到來時,通過制造單元之間、制造單元與AGV之間的相互協(xié)調(diào),為每個具體的工件工序加工任務(wù)分配最合適的加工設(shè)備及AGV,從而提高系統(tǒng)的生產(chǎn)效率。
4多AGV調(diào)度仿真實驗平臺開發(fā)及驗證
4.1多AGV調(diào)度仿真實驗平臺
根據(jù)神經(jīng)-內(nèi)分泌協(xié)調(diào)機制開發(fā)的多AGV調(diào)度仿真實驗平臺如圖3所示,主要由AGV、制造單元、監(jiān)控終端等模塊組成,其中,制造單元又由機床、工件緩沖區(qū)、機械手等組成。

圖3 多AGV調(diào)度仿真實驗平臺實物圖
4.2多AGV調(diào)度仿真實驗
假設(shè)有一生產(chǎn)任務(wù)W由三個工件組成,其中每個工件具有三道工序需要加工,每道工序均需在相應(yīng)機床上加工一定時間,具體的任務(wù)參數(shù)如表1所示。

表1 生產(chǎn)任務(wù)參數(shù)表
系統(tǒng)中有6臺不同類型的機床,其中有2臺車床、2臺銑床、1臺磨床、1臺鉆床,具體機床參數(shù)如表2所示。

表2 機床參數(shù)表
生產(chǎn)任務(wù)產(chǎn)生后,根據(jù)神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的任務(wù)分配機制進行任務(wù)分配,分配完成的任務(wù)加工序列如表3所示,對應(yīng)的生產(chǎn)任務(wù)甘特圖如圖4所示。

表3 任務(wù)加工序列表

圖4 生產(chǎn)任務(wù)甘特圖
AGV根據(jù)此任務(wù)加工序列,在基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的任務(wù)調(diào)度機制調(diào)度下,完成工件的出庫、機床間運輸、入庫等操作,最終執(zhí)行完所有任務(wù),返回初始位置。由此得到的AGV運行及等待具體時間如圖5所示。

圖5 AGV工作時間圖
統(tǒng)計AGV的總體運行時間、有效運行時間及空閑等待時間,具體的各類時間參數(shù)如圖6所示。

圖6 AGV運行時間參數(shù)圖
由此可以得到1號和2號AGV的總體運行效率η1,η2:
進一步分析實驗結(jié)果可知:針對具體的生產(chǎn)任務(wù),基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的任務(wù)分配及調(diào)度機制可以根據(jù)系統(tǒng)中各機床的當(dāng)前狀態(tài)進行任務(wù)分配,得到當(dāng)前狀態(tài)下的較優(yōu)任務(wù)加工序列。同時,能夠根據(jù)AGV的當(dāng)前狀態(tài)進行任務(wù)調(diào)度,最大化AGV的運行效率,從而提高系統(tǒng)的整體效率。
5結(jié)語
針對多AGV系統(tǒng)調(diào)度的復(fù)雜性,借鑒維持生物體內(nèi)環(huán)境的神經(jīng)-內(nèi)分泌協(xié)調(diào)機制,提出了基于神經(jīng)-內(nèi)分泌協(xié)調(diào)機制的多AGV任務(wù)分配及調(diào)度機制,解決了多AGV系統(tǒng)中的任務(wù)調(diào)度及協(xié)調(diào)控制問題,并通過仿真實驗驗證了方法的可行性及有效性,結(jié)果表明該方法可以提高系統(tǒng)的運行效率。
參考文獻:
[1] 周凱, 劉成穎. 現(xiàn)代制造系統(tǒng)[M]. 北京:清華大學(xué)出版社, 2005.
[2] Iris FAVIS. Survey of research in the design and control of automated guided vehicle systems [J].European Journal of Operational Research, 2006, 170(3): 677-709.
[3] Tuan LE-ANH, MBM DE KOSTER. A review of design and control of automated guided vehicle systems [J]. European Journal of Operational Research, 2006, 171(1): 1- 23.
[4] 孫奇. AGV系統(tǒng)路徑規(guī)劃技術(shù)研究[D]. 浙江: 浙江大學(xué), 2012.
[5] 張凌燕, 溫慶城, 張志文. 神經(jīng)系統(tǒng)與內(nèi)分泌系統(tǒng)的相互影響與協(xié)同作用[J]. 生物學(xué)通報, 2006, 41(7): 24- 25.
[6] Zheng K, Tang D, Gu W, etal. Distributed control of multi-AGV system based on regional control model. Production Engineering Research and Development[J], 2013, (7):433-441.
[7] Farhy L S. Modeling of oscillations in endocrine networks with feedback [J]. Methods in enzymology, 2004, 384: 54-81.


收稿日期:2014-01-13
中圖分類號:TP183
文獻標(biāo)志碼:A
文章編號:1671-5276(2015)04-0112-04
作者簡介:唐敦兵(1972-),男,湖北仙桃人,教授,博士,研究方向為智能制造。
基金項目:國家自然科學(xué)基金資助項目(51175262);江蘇省杰出青年基金(BK2012010111);江蘇省產(chǎn)學(xué)研基金(BY201220116)
