基于基準的定位元件約束自由度分析
2016-01-29 05:13:55趙軻
機械制造與自動化 2015年4期
趙軻
(廣東石油化工學院 機電工程學院,廣東 茂名 525000)
基于基準的定位元件約束自由度分析
趙軻
(廣東石油化工學院 機電工程學院,廣東 茂名 525000)
摘要:為解決工件在定位時需要約束的自由度數和自由度以及定位元件約束工件自由度數和自由度的問題,應用六點定位原理,對各種典型定位實例和定位元件進行了分析。分析表明,工件需要約束的自由度數和自由度由所選擇的定位基準幾何特征決定,而定位元件約束的自由度數和自由度也由定位元件與定位基準實質接觸面幾何特征來決定,且其個數都遵循“面三、線二、點一”的規律。
關鍵詞:定位基準;自由度;約束;定位元件
Analysis of DOF Constrained by Position-Element Based on Datum
ZHAO Ke
(College of Machinery and Electronic Engineering, Guangdong University of Petrochemical
Technology, Maoming 525000, China)
Abstract:In order to solve the problems of DOF and DOF number which needs to be constrained when the workpiece is located, and position-element can constrain, this paper analyzes the cases of typical position and position-elements. It indicates: DOF and DOF number which needs to be constrained is determined by the geometric features of location datum, DOF and DOF number which the position-element can constrain is determined by the geometric features of essence contact surface between the position elements and the location datum, the DOF number is three, two and one when the datum and contact surface is surface line and point.
Keywords:location datum; DOF; constraint; position-element
0引言
工件在夾具中定位,以便相對于機床和刀具有正確的位置進行加工,所以,定位方案需要約束的自由度,應根據工件被加工面的加工要求來決定。一般來講,根據6點定位原理,工件在空間運動的6種可能性,即6個自由度,應該用6個正確分布的點來全部約束。但事實上,不是所有的被加工工件都需要約束6個自由度,進行6點完全定位,也可以采用不完全定位和過定位方案等。甚至,有些工件是無法進行完全定位的。文中對各種典型的工件定位實例進行分析,同時研究了典型定位元件約束了工件的自由度,揭示了工件需要被約束的自由度數、自由度與選用的定位基準幾何特征之間的內在聯系和基本規律,為合理設計定位方案和選擇定位元件提供了直接的理論依據。
1定位基準與約束自由度和自由度數的關系
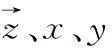
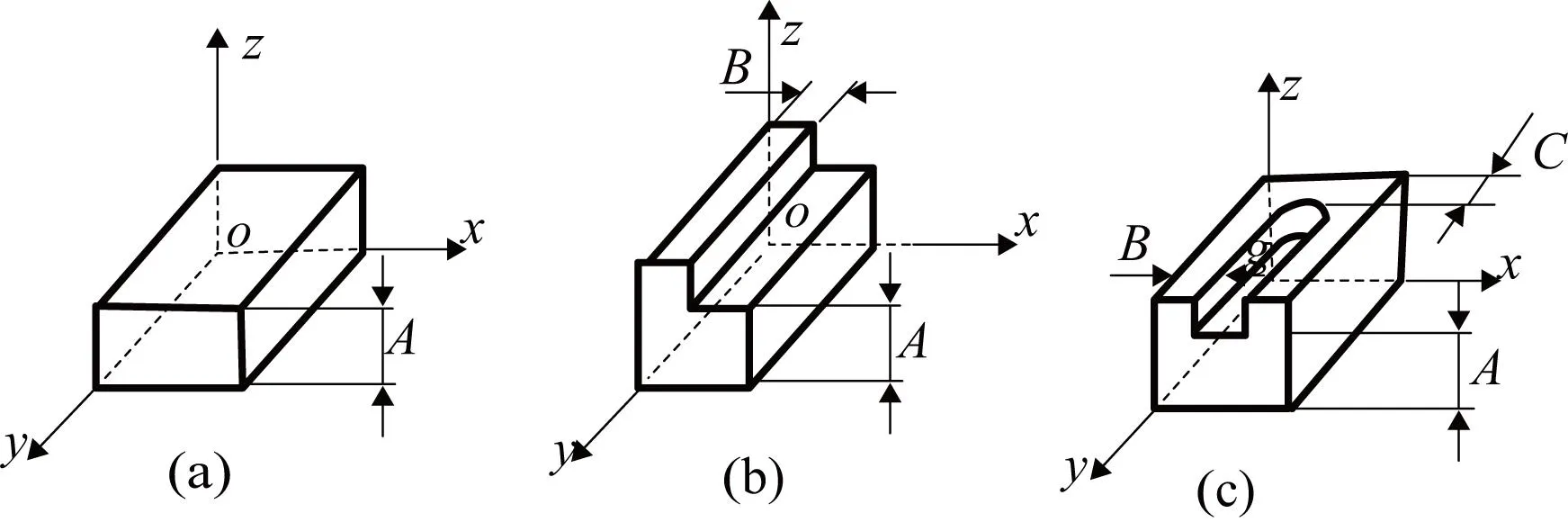
圖1 長方體工件的定位基準

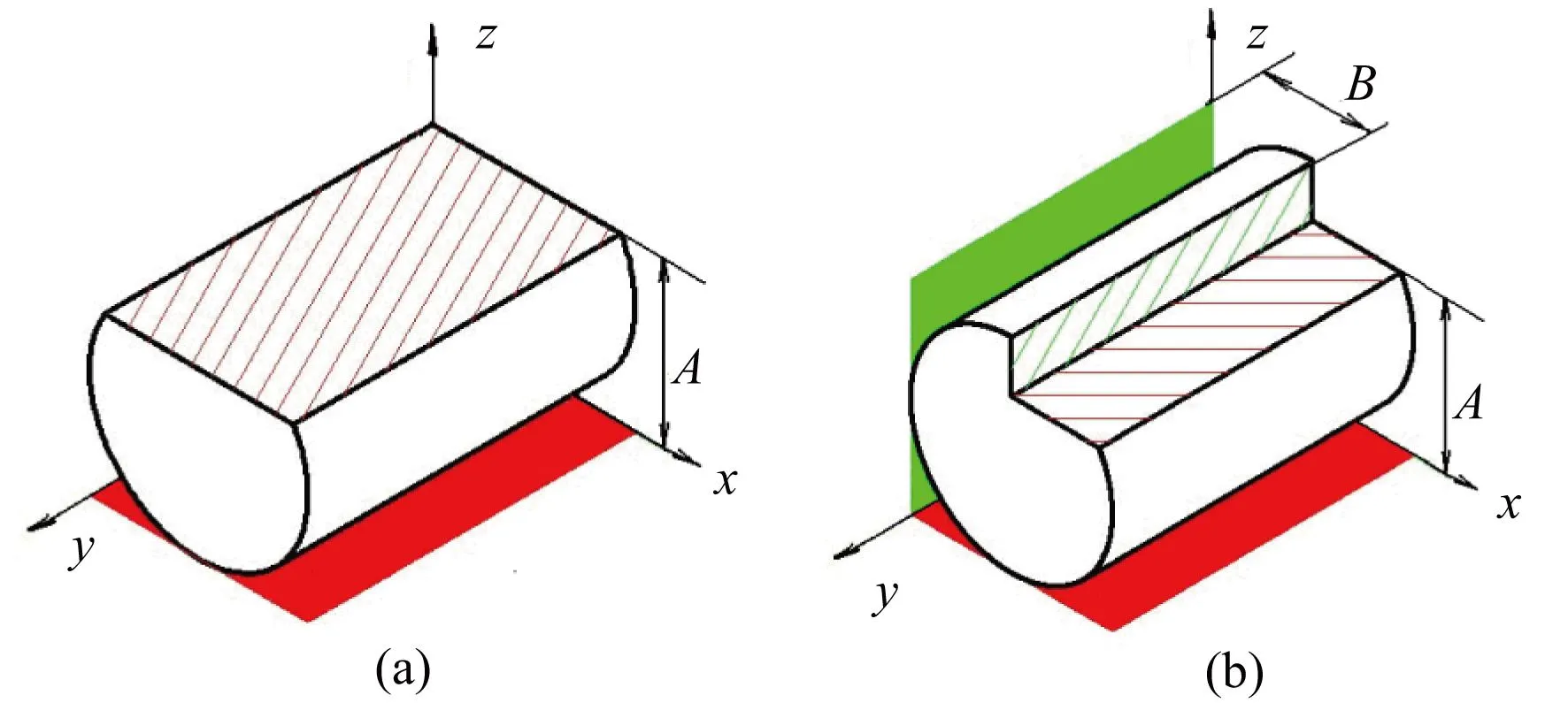
圖2 長圓柱體工件的定位基準

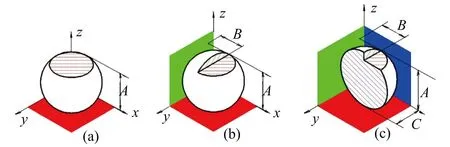
圖3 球體工件的定位基準
綜上所述,在判斷工件需要約束哪些自由度時,可根據其尺寸精度要求,先確定需要的定位基準面,并根據所選的定位基準面幾何特征,遵循“面三、線二、點一”的規律來確定各自需要約束的自由度數和自由度,然后根據實際情況,考慮需要消除的重復定位,即可得到工件需要約束的自由度。
2定位元件約束的自由度數
確定需要約束的自由度后,需要選擇合適的定位元件對工件進行定位,而定位元件能夠限制的自由度,也由定位元件的定位面幾何特征來決定。
常用的定位元件主要有:支承釘(如圖4(a)),支承釘與定位基準面的接觸本質上相當于一個點,限制一個自由度;支承板,短V型塊,短定位套、短定位銷等(如圖4(b))與定位基準面的接觸本質上相當于一條線,限制兩個自由度;錐套和錐銷(如圖4(c))與定位基準面的接觸為面,限制3個自由度。從表面上看,錐銷和定位基準面的接觸為線接觸,但其定位元件的定位面為錐面,和平面定位一樣,故其應限制3個自由度。具體限制哪些自由度,不再贅述。

圖4 常用的定位元件
綜上所述,定位元件限制的自由度數也遵循“面三、線二、點一”的規律,這里的面指與定位元件實際接觸的定位面是圓錐面或者大的平面。
3結語
工件在夾具中定位時,需要約束其在空間中運動的6種可能性,即6個自由度。但在分析定位需要約束的自由度時,需要注意“定位不等于夾緊”等問題。因為概念不明確,難以區分析并得出到正確的結論,或者得到正確的結論但不明白為什么。
文中從定位基準的角度出發,分析了6點定位原理,明確了定位就是通過確定定位基準面在空間(夾具中)的正確位置,進而使得工件定位的概念。所以,選擇不同的幾何要素做基準面,只要分析該幾何要素在空間需要約束的自由度就可以了,且該自由度數也是基準面最多能約束的自由度數,遵循“面三、線二、點一”的規律(不包括出現過定位時的分析[4])。定位元件限制的自由度數由定位元件的有效作用面形狀決定,也遵循“面三、線二、點一”的規律。
參考文獻:
[1] 呂明,龐思勤. 機械制造技術基礎(第2版)[M]. 武漢:武漢理工大學出版社,2010.
[2] 吳拓. 機械制造工藝與機床夾具[M]. 北京: 機械工業出版社,2010.
[3] 李邵華. 數控機床與工裝夾具設計[M]. 杭州:浙江科學技術出版社,2009.
[4] 嚴紅. 組合定位時自由度判定的研究與應用[J] . 湖南工業職業技術學院學報,2012,8(4):36-37.


收稿日期:2014-05-06
中圖分類號:TH703.65
文獻標志碼:B
文章編號:1671-5276(2015)04-0067-02
作者簡介:趙軻(1978-),女,山西興縣人,講師,碩士,研究方向:機電液一體化產品設計。
基金項目:茂名市科技計劃項目資助 (2011B01008)
