星際探索中的電子技術
2016-01-21 03:41:06耿虎軍
無線電工程 2016年1期
耿虎軍
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;
2. CETC航天信息應用技術重點實驗室,河北 石家莊 050081)
?
星際探索中的電子技術
耿虎軍1,2
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;
2. CETC航天信息應用技術重點實驗室,河北 石家莊 050081)
摘要各種各樣的深空探測器持續地擴展著人類的認知范圍。通過對幾次典型深空探測活動的成敗分析,總結電子技術在星際探索任務中所起到的作用,分析星際探索任務中電子設備應用所獲得的經驗和啟示。認為電子設備的功能、性能、壽命、可靠性是星際探索任務成敗的決定性因素,電子技術甚至成為了限制星際探索能力的一個瓶頸。進而論述了未來深空探測任務對電子技術發展的需求,以期對未來電子系統的研制有所借鑒。
關鍵詞電子技術;星際探索;深空測控;激光通信;星際網絡

0引言
星際探索是人類對地球以外天體和空間進行探測的活動。它通過對地球以外的行星及其衛星、小天體和矮行星以及太陽系外宇宙空間等的探測,探究太陽系及宇宙的起源與演化、太陽及小天體活動對人類生存環境的災害性影響、太陽系生命的起源與演化等重大科學問題,為人類可持續發展服務。
深空探測活動的實施一般按照系統工程的原理進行組織,分為5大系統:深空探測器系統、運載火箭系統、發射場系統、測控通信系統和地面應用系統。從工程組織的角度,人們難以完整地理解電子技術對于星際探索任務的重要性。從學科分類的角度審視星際探索任務,可以看到電子技術滲透到5個工程組織系統中的每一個部分,并且伴隨深空探測活動的整個生命周期。
1令人驚嘆的深空探測任務
一直以來,人們以各種方式認識著太空,從肉眼觀察發展到望遠鏡觀察,從探測器抵近觀察到人類直接登陸地。而無線電技術的發展,極大地推動著人類星際探索的進程。
1.1飛行了38年的深空探測器
2013年9月13日,美國航空航天局(NASA)宣布:旅行者一號已經離開太陽風層,正式成為第一個進入星際空間的人造物體[1]。權威專家認為進入星際空間是歷史性飛躍。
旅行者一號最初目標是探測木星、土星、天王星和海王星。1977年9月5日升空,1979年2月到達木星上空,1979年11月飛到土星附近,后因增加了探測土衛六生命跡象的任務,改變軌道繞飛土衛六。在完成土星六探測后,旅行者一號沒有按原定計劃飛往天王星和海王星進行探測,而是直奔太陽系邊緣。它飛出太陽系后的主要任務是測量宇宙光束粒子、探測太陽風和其他恒星風之間的作用。
旅行者一號有2項主要措施使其能夠長時間工作:① 攜帶了足夠多的能源,并且一旦完成了某項任務,就關閉相應的設備以節省能源;② 使用了可靠的電子器件,一直到現在它們都在穩定、可靠地工作,并且在飛躍木星時,有效地抵抗了來自木星的強烈射線輻射。
2004年,旅行者一號的定位系統出現故障,需要啟用后備系統。時隔20多年之后,后備系統能否正常工作讓人十分擔心。轉換過程中,飛行器電腦將太陽當成了地球,差點兒使飛行器和地面失去聯系。幸好地面控制人員在完全啟用后備系統前,設置了15 min的間隙分析數據,以決定切換是確認還是放棄。地面控制中心利用這一間隙,啟用回轉儀穩定飛船,最后順利啟動了后備系統。
1.2驚險迭出的“隼鳥”探測器
2010年6月13日,日本“隼鳥”深空探測器在澳大利亞的伍莫拉沙漠著陸,帶回了絲川小行星1 000多個微米級的巖石微粒,這是人造飛行器首次與小行星接觸后回到地球[2]。“隼鳥”重510 kg,發射于2003年5月9日,在天外漂泊了7年,飛行60億千米,旨在驗證離子推進、自主導航、采樣和再入等技術。
“隼鳥”探測器任務過程中出現了很多故障,導致任務過程驚現迭出,能夠返回地球是一件非常不容易的事情。
發射后,2003年一次劇烈的太陽耀斑使得“隼鳥”探測器的太陽能電池發生損壞,影響了離子推進系統,導致抵達時間推遲了2個月。2005年7月31日,“隼鳥”探測器的一個動量輪由于摩擦太大而損壞。2005年底“隼鳥”探測器在絲川小行星周圍進行了約3個月的巡視勘測,在此期間,“隼鳥”探測器發生了長時間的通信中斷,只能實施自主光學導航。2005年11月20日,“隼鳥”著陸絲川小行星后,與地面失去聯系3 h,控制中心一度宣布“隼鳥”處于失蹤狀態。離開絲川后,“隼鳥”返航途中出現了多次技術故障,包括離子發動機故障、動量輪損壞、推進劑泄露、蓄電池喪失功能和通信中斷等,導致回歸時間推后了3年。返回地球途中,推進劑泄露導致探測器一直慢慢滾動,天線每6 min才有1 min對準地球,給通信帶來巨大的困難。2009年11月最后一具發動機停止工作。“隼鳥”的離子推進系統有4個主噴管和4個小噴管,最終地面人員使用小噴管實現航向控制,使得“隼鳥”得以返航[3]。
雖然驚險跌出,“隼鳥”航天器依然向世界展示了日本的離子推進技術、小行星準確定位技術、地面—太空遙控技術、星際光學自主導航技術、自主著陸智能機器人技術和返回地球技術。尤其是一度被認為將“死于太空”的“隼鳥”號“起死回生”,展現出日本強大的太空裝備遙控能力[4]。
1.3生命力頑強的古老探測器家族
2001年4月位于西班牙馬德里的深空天線意外收到了一個異常微弱的信號,經查證該信號是與控制中心失去聯系8個月的“先鋒十號”[5]。截至2002年,“先鋒十號”已經在太空中超限服務30多年,它與“旅行者1號”、“旅行者2號”和“IMP-8號”都是拒絕死亡的精英飛行器。
“先鋒十號”發射于1972年3月2日,目標是探測水星。2002年3月2日,地面控制中心依然能夠與它進行無線電信號的溝通。因為距離長達120億千米,溝通一次事件長達22 h,但是“先鋒十號”的回答清晰準確。2003年1月22日,NASA又一次收到“先鋒十號”來自123億千米遠太空的微弱信號。
1997年,經過25年的宇宙航行之后,“先鋒十號”用于和地面站之間建立聯系的定向天線指向逐漸發生了偏移。重新對天線定向,使得“先鋒十號”面臨著巨大的風險。在定向過程中,需要反復關閉它的測控設備,以提供定向操作所需要的足夠能量。反復關閉測控通信設備,可能產生熱震蕩,從而導致測控通信損壞。經過90 min的操作之后,遲暮之年的“先鋒十號”經受住了考驗,完成了天線重新定向操作。
后來發射的旅行者“長生不老”的部分原因是他們的設計參照了“先鋒十號”、“先鋒十一號”發回的太空環境信息。2個先鋒都發現,木星的輻射帶遠比人們預計的密集得多。旅行者采取了充分的防輻射措施,采用能夠有效防輻射的光學玻璃和電子原件。考慮到飛行器超期運行的可能,又在旅行者探測器上安裝了后備運行系統,以便地面控制中心能夠在必要時遠程啟動。
1.4迄今最先進的火星巡視器
2012年8月,迄今為止質量最大(3.257 kg)、性能最先進的火星探測器“好奇”號成功著陸火星。“好奇”號利用導航計算機、反沖推進火箭和“天空起重機”技術,實現了著陸火星方式的突破。
“好奇”號與地球的通信方式有2種:① 采用特高頻(UHF)頻段,通過在軌的火星軌道器中繼,完成與地球的測控聯系。火星軌道器主用“火星勘察軌道器”,備用“奧德賽”軌道器,同時也可以通過歐州航天局的“火星快車”進行數據中繼服務。② “好奇”號采用X頻段直接與地球完成測控通信,并且在“好奇”號上有2付X頻段天線:1付寬波束、低增益天線和1付窄波束、高增益天線。
“好奇”號火星探測器配備很多先進的電子設備以及先進的計算機系統。美國三代火星車嵌入式計算機系統的性能比較[6]如表1所示。
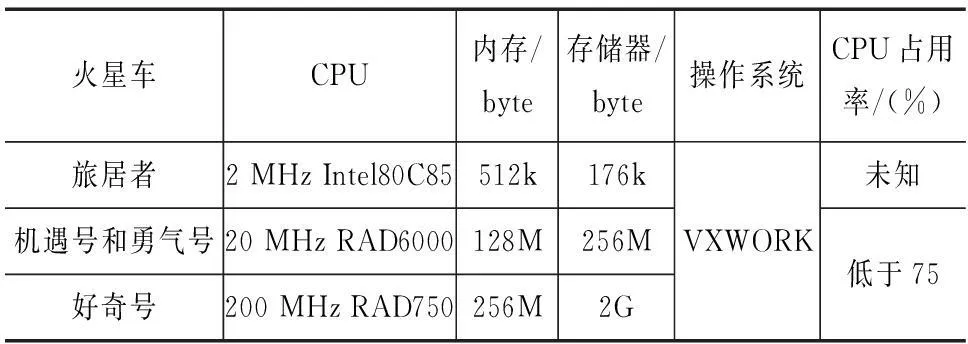
表1 美國三代火星車嵌入式計算機系統的性能比較
2深空探測任務中的電子設備
深空探測器飛出地球軌道后,電子設備發揮著舉足輕重的作用,成為探測器生命延續的決定性因素,或者成為探測器起死回生的唯一手段。具體地說,它完成的工作包括:在整個飛行過程中進行高精度跟蹤測量,以準確確定軌道并進行軌道機動控制和狀態監視;在達到目標后進行制動和入軌等操作;在探測過程中通過深空通信系統將操作指令發給科學儀器,以控制其進行科學探測,并將所獲取的科學探測數據傳回地球。
伴隨深空探測器整個生命歷程的電子設備包括:① 電源:核電源、太陽能電池和蓄電池;② 星載計算機系統;③ 各種無線電傳感器:測速、測距設備和陀螺等;④ 星載測控通信設備和天線;⑤ 大型地面測控通信設備和地面控制中心。
2.1旅行者等古老探測器給予人們的啟示
未來擺在旅行者一號面前的有2個困難:
① 電力的問題。2個探測器都由钚放射性衰變產生315 W電量,電量每年都會衰減4 W左右。為節約電力,旅行者一號在探測完土星及其衛星后已陸續關閉了一些有效載荷,2020年還將關閉磁場和粒子探測設備,只留下紫外線探測設備繼續工作,直到2025年核電池耗盡。在2025年以后,將收不到旅行者一號發回的科學數據,但其工程數據還將在之后幾年中繼續傳回,它會繼續以17 km/s以上的第三宇宙速度向著銀河系的中心前進。
② 信號的接收問題。因為信號的強度與距離的平方呈反比,距離越遠信號越弱。旅行者一號可以飛得無限遠,但如果接收不到信號,那一切都沒有意義。旅行者一號發回的數據要用超過17 h才能傳回地球。目前發射信號的功率為23 W,相當于冰箱內燈泡的功率。現在NASA的深空測控站每天花費10 h以上的時間接收旅行者的數據。
旅行者一號現在和地球保持聯系的方式是通過電磁波發送不同頻率的單音信號,一個單音持續幾秒鐘完成一次傳送。旅行者探測器上的天線口徑為3.7 m,地面使用上百米口徑的深空天線才能完成這樣的信息收發。在旅行者一號這樣的距離上,完成如此低速的通信,已經達到了目前人類通信手段的極限水平。
令人驚訝的是旅行者一號上電子設備的可靠性。在復雜的空間環境中飛行了38年之后,20世紀70年代的電子設備依然能夠正常工作。這對于旅行者一號上復雜的電子設備來講,是一件值得自豪的事情。另一個壽命更長的角色值得引起人們的注意:地面控制中心以及它的大型測控站。也許是由于它就在身邊便于維護,從而不讓人覺得它的長時間堅持工作使人驚訝,但它確實一直在照看著旅行者的一舉一動。
2.2 “隼鳥”等航天器給予人們的啟示
任務過程中,“隼鳥”的動量輪陸續損壞,地面人員通過測控鏈路完成飛行器的姿態調整。返航途中離子發動機故障,地面人員通過測控鏈路關閉了主發動機,調整程序使用平衡用的小噴管繼續返航,雖然推遲了3年,但是依然返回了地球。所有這些調整工作都是地面人員通過測控通信設施得到探測器的信息,綜合判斷故障后,制定策略,通過測控通信設施調整探測器上的計算機程序完成的。而與此形成強烈對比的是:返途中,時斷時續的測控通信限制,給返回控制增加了很多的困難;多次的通信中斷,使得人們一度宣布“隼鳥”失蹤。可見電子設備在延續“隼鳥1號”的生命過程中起到了多么重要的作用。
2015年6月16日歐洲航天局宣布,通過新獲得的1 m分辨率火星表面圖像,發現了失聯10余年的“獵兔犬”號火星著陸器。圖像表明,“獵兔犬”號失聯的原因是太陽能電池板未能全部展開,導致和地球聯系的天線未能露出,未能和地球測控網建立聯系。可見,能源系統對任務來講的重要性體現在多個方面,影響任務的方式也會多種多樣。這也說明,和控制中心建立聯系是非常關鍵的。如果“獵兔犬”號能和地面控制中心聯系上,也許像“隼鳥”號一樣還有救。
相關的另一個案例是“伽利略”號探測器。它的高增益主天線出現了故障,僅能利用低增益天線與地球進行通信。因此,在整個小行星Gaspra的探測過程中,僅能拍攝4幅圖像。為了盡可能地提高圖像中的信息量,“伽利略”號采用了創新性的圖像拼接技術。事實證明,雖然僅有4幅圖像可用,但依靠單幀圖像拼接技術獲得的天體量測信息,“伽利略”號還是獲得了較高的導航精度,導航誤差約為10 km,這說明與地球的測控聯絡就是深空探測器的生命線。
2.3目前的深空地面測控能力
2.3.1NASA的深空地面網
NASA的深空網主要由經度相隔約120°的3個基地組成,可以對深空目標實施不間斷測控。這些基地裝備有高靈敏度的接收系統和大型天線,每個基地至少有4類天線:34 m高效天線、34 m波束波導天線、26 m天線和70 m天線。
通過采用VLBI測量技術,NASA在火星附近探測器的位置測量能力能夠達到1 km,木星附近達到幾km量級,火星軌道器的軌道測量精度優于100 m。當火星和地球距離較近時,火星軌道器和地面測控站之間能夠傳輸6 Mbps的數據。任務需求驅使NASA對深空地面網實施Ka頻段改造計劃,用具備Ka能力的34 m波束波導天線更換其老齡化的70 m天線,增強下行鏈路能力。
2.3.2ESA的深空地面網
2012年10月,歐空局(ESA)啟用了在南美洲阿根廷的35 m深空測控站(編號為DSA 3),測控站天線高40 m,整體質量610 000 kg,配置了冷卻到-285 ℃的低溫制冷低噪聲放大器,能夠接收到木星軌道以遠航天器返回的超微弱信號,并在不同的功率范圍(最高20 kW)使遙控指令在太陽系內傳播。
DSA 3與已有的澳洲西部新諾舍的DSA 1、西班牙塞布萊羅斯的DSA 2一起構成了三站一體的深空地面網,為ESA深空任務提供全球性覆蓋。
2.3.3中國的深空地面網
在嫦娥月球探測任務的推動下,我國正在建設自己的深空測控網。目前,已經建成喀什35 m S/X/Ka頻段深空測控站和佳木斯66 m S/X頻段深空測控站。預計2017年,位于阿根廷的35 m S/X/Ka頻段深空測控站將建成并投入使用。
2012年10月位于上海佘山的65 m射電望遠鏡天線建成并正式啟用。該射電望遠鏡工作頻率最高到Q頻段(40~46 GHz),對應的觀測波長范圍從最長21cm到最短7 mm。2013年12月全程參加了嫦娥三號著陸器和月球車X頻段VLBI測定軌測定位任務,明顯提高了VLBI的測量精度[9]。
深空測控網的初步建成標志著我國的飛行器測控能力從地球周邊走向星際空間。深空測控網建設過程中,所涉及到的多項核心技術走到了世界前列。不僅僅是填補了我國深空站的空白,更重要的是通過它的研制,帶動了多項核心技術的發展和關鍵器件的研制,使我國測控通信領域從總體設計、核心技術、關鍵器件研制到檢測測試水平,都跨上一個新臺階。
3未來深空任務中的先進電子技術
未來深空任務中,深空探測器需要充足的能源供應、性能強大的空間計算能力、高精度的環境感知與測量能力、高精度的測定軌能力、大容量的數據傳輸能力、連續可靠的測控聯系。這些電子技術的發展都會極大地推動星際探索的進步。
3.1空間能源技術
深空探測器對空間能源系統的需求主要表現在:功率需求大、持續時間長、可靠性要求高、環境條件適應性強。星際探測可用的能源包括太陽能、核能和化學電池等。由于受到太陽光照射范圍的限制,太陽能在星際探索應用中受到一些限制。羅塞塔木星探測器是最遠的只靠太陽能源的航天器。獵兔犬是第一個僅靠太陽能源的火星著陸器。一些距離太陽更遠的星際探索任務中只能依靠核能源。
3.1.1太陽能源技術
空間太陽能電池應具備高的體積質量效率、高能量轉換效率、耐輻射、低溫低亮度和高溫高亮度特性優良的特點。目前,商用衛星太陽能電源系統提供的功率一般為10 kWe左右,國際空間站太陽能電源系統的功率超過了100 kWe。已經應用過的小型空間太陽能電推進系統的太陽能電池功率約為20 kWe左右。火星星球表面應用過的太陽能電源,在火星距離太陽為1個天文距離單位時,能夠提供約1.5 kWe的功率。
未來深空任務中的大功率電推進探測器需要更先進的太陽能電源[8]。距離較近的深空任務,電推進系統需要提供的功率大于40 kWe;而載人火星任務的電推進系統則需要提供大于250 kWe的功率。發射時,太陽能電池的收藏態功率密度需要達到40 kW/m3,同時這些電池必須能夠在穿越范艾倫輻射帶時,在電推進系統產生的等離子體范圍內高效工作。此外,在星際探索任務中,伴隨著探測器到太陽距離的變化,光照條件和環境溫度(-130~250 ℃)都有著比較大的變化,這種情況下,都要求太陽能電池具有較高的光電轉換效率。
3.1.2核能源技術
放射性同位素電源系統是適合深空探測的一種不依賴于太陽的可靠能源。放射性同位素電源系統具有以下優點:壽命長;可適應各種工作條件,不受輻射影響;結構緊湊,姿態控制簡單;可靠性高;動力可調;不產生噪音、振動和扭矩。因而非常適合在外層空間和行星表面的極端環境中執行任務。
深空探測任務是推動放射性同位素電源技術進步的主要動力。從1961年人們就開始在空間中使用它,一般能夠做到的功率容量為3~5 We/kg,效率約6%,壽命超過30年。深空任務需要將同位素電源的效率提高到12%以上,功率容量提高到8 We/kg,壽命高于14年。
NASA計劃發展的高效電源包括:采用高效熱電轉換器的eMMRTG-100同位素電源,輸出功率100 W,效率達到10%;ARTG-500同位素電源,輸出功率500 W,效率達到15%。而采用斯特林電能轉換裝置的ASRG-500同位素電源,輸出功率100 W,效率達到30%[8]。
載人火星任務需要電源系統提供kWe級到MWe級的功率,就需要考慮空間核裂變電源、空間核聚變電源或者其他更先進的手段。
3.2空間計算技術
空間計算系統管理探測器的所有任務,包括精密著陸、躲避危險、空間對接、環境分析和科學探測等等,因此需要高能源效率、高計算能力、強抗輻射能力和高容錯糾錯能力,同時盡量小型化。
受限于空間計算系統的能力,以往深空任務中的處理程序邏輯關系簡單、固定,現在的探測器智能化需求越來越高。探測器著陸天體時,進入、下降和著陸過程中需要連續處理視頻信號、各種超光譜、綜合孔徑雷達等高速傳感器數據;任務過程中,探測器要根據環境變化處理各種意外情況,完成模糊判斷、危險評估、任務規劃和故障管理等功能,要求空間計算系統具備模糊、分類和并行的計算特征。這些功能極大地增加了對空間計算系統的能力需求。
空間計算系統包括處理器、存儲器、軟件和通信網絡等部分。多核處理器是提高計算能力和容錯能力的一個技術途徑。處理能力的提高也需要高密度、大容量、抗輻射的存儲器。而軟件是提高深空探測器自主能力的核心,它需要錯誤校驗和恢復技術以保證飛行器功能的可靠性和安全性。高效、高速、可靠的通信網絡負責連通計算系統與各種傳感器和科學儀器的數據通道。
NASA的目標是發展具備24GOPS/10GFLOPS計算能力,功耗7 W,具備支持軟件容錯構架的多核計算架構;內存容量1 Gb,存取速度6.4 GB/s;存儲器1 Gb,存取速度500 MB/sec;通信網絡速率達到10 Gbps[10]。
3.3深空測控通信技術
深空測控通信設備包括探測器上的測控通信設備、空間傳輸與中繼網絡以及地面的測控通信設施。這些設備是溝通探測器與地球聯系的唯一通道。
3.3.1星際互聯網技術
星際互聯網作為一種通用的空間信息網絡架構,旨在為深空探測任務提供通信服務,為探測器和軌道器提供導航服務。將深空測控網向星際互聯網轉化,可以使深空內的數據傳輸完全自動化。當前,人們需要制定所有深空探測器的每一次測定軌和數據傳輸規劃[11]。
2012年11月9日,NASA宣布與ESA進行了一項模擬“星際互聯網”運行的實驗,由國際空間站乘員利用一臺電腦操控了一個歐洲太空控制中心的小型機器人。此次實驗驗證了通過星際“容延遲網絡”(DTN),利用火星在軌衛星操控火星表面機器人的功能。
DTN協議提供了類似互聯網技術的標準化通信。不同于全球互聯網聯接的TCP/IP協議,DTN旨在處理行星際通信期間可能突發的信號斷開、錯誤和延遲。當航天器繞行在行星后面或遇到太陽風時,常會發生故障,導致長期間的通信延遲。
相對于傳統的直接與地球通信而言,通過在火星軌道運行的航天器的中繼通信解決通信難題具有重要意義。NASA的火星環球勘測者(MGS)、火星勘察軌道器(MRO)和火星奧德賽(ODY)軌道器以及ESA的火星快車(ME)軌道器構成初步的中繼通信體系,這一體系已經成功地支持了好奇號、勇氣號和機遇號火星表面巡視探測器。中繼鏈路將使能量效率比深空鏈路提高一至兩個數量級[11]。
3.3.2空間激光通信技術
2013年NASA在LADEE月球探測器上完成了月球到地球的激光通信實驗,下行傳輸速率達到622 Mbps,上行傳輸速率達到20 Mbps。相對于LRO月球探測器的Ka頻段數據傳輸系統,該實驗的激光數據傳輸能力提高了3~6倍。該次試驗驗證了深空光通信中的2項關鍵技術:級聯編碼脈沖位置調制技術和超導納米線光子技術探測器(NbN、InGaAs或WSi)技術。
空間光子探測器需要提高的性能包括:效率、抖動、抗輻射特性、飽和特性和高溫工作特性等,同時需要提高大面積檢測器陣列的制造成品率。要在深空中廣泛使用激光作為信息傳輸手段,必須增加激光器的壽命(優于10年)、提高激光器的能源效率(優于30%),以適應深空探測的長時間任務需求。另外,大氣的云、水汽、大氣波動和大氣陽光散射對激光傳輸的影響,也是限制激光應用的主要因素,需要有相應的技術手段克服這些困難。
激光測量系統可以達到比無線電測量系統更高的測量精度。但更高的精度也對激光系統提出了額外的要求,包括高帶寬的光子檢測器的響應能力、精密的測量結果標定能力以及遙控/遙測/測速/測距多功能融合的信號體制設計等[11]。
3.3.3高精度的時頻產生及分發技術
未來的星際探索中發展精確導航能力至關重要。NASA的最終目的是在太陽系內實現ns量級時間同步精度[11]。太陽系內ns級的時間傳遞可以為深空內的探測器提供更高的位置測量精度,可以支持空間編隊飛行、支持自主導航、多探測器協同、探測器抵近與維護、探測器對接等功能。其中的關鍵技術包括:使得空間高性能石英鐘能夠適應空間環境溫度的變化、適應探測器磁場和電場環境、適應空間引力影響以及空間輻射影響;降低空間原子鐘的復雜度和成本,同時提高空間原子鐘的性能;建立高精度的空間時頻傳輸網絡,其中的關鍵技術包括:時頻分布機制、誤差測量與估計方法、誤差補償與控制機制、高效網絡拓撲結構等[16]。
NASA正致力于研發“深空原子鐘”(DSAC),一個小型化汞離子原子鐘,其穩定性比當前最好的導航原子鐘高幾個數量級。一方面,深空原子鐘的應用可以提高科學探測精度:通過使用單向無線測量鏈路,使在太陽系遙遠星體的導航、重力學、掩星學準確度提高10倍,并提高航天器精確地進入軌道或著陸在其他天體上的能力;另一方面,深空原子鐘的應用使深空測控轉向更靈活、擴展性更強的單向無線導航體系,實現多任務共享測控網天線基礎設施,降低使用深空測控網的任務成本。
目前的時間保持和授時分發精度需要幾個數量級的改進,以提供更精密的星際測量數據。2010年英國國家物理實驗室利用光梳實現86 km光纖距離傳輸的超穩定的微波頻率傳輸系統。從遠端測量得到的時頻傳輸系統自身的頻率穩定度達到4×10-17/1 600 s,時間抖動僅為64 fs。
3.3.4空間射頻技術
射頻一直是深空測控的主要支柱,將來仍將是深空測控通信體系結構的重要組成部分。未來的深空探測任務需要提高2個量級的下行數據接收能力(達600 Mbps),大幅度地提高上行數據傳輸能力,發展創新型的手段解決應急測控問題,以提高深空任務的安全性,解決地球再入時的黑障通信難題[7]。
在空間段提高深空遠距離測控通信性能的技術包括:① 空間高效功放技術,如高功率行波管放大器和分布式固態功放,行波管放大器效率提升到70%~75%,重量降低到4 kg。固態功放的效率提升到35%~40%,重量降低到1~2 kg;② 空間載大天線技術,如口徑大于5 m的可展開網眼天線或具有形狀記憶功能的聚合體微波天線面;③ 高效率調制和編碼技術;④ Ka頻段空間射頻應用;⑤ 空間射頻小型化技術。
在地面段,提高深空遠距離測控通信能力的技術有大口徑天線技術、天線組陣技術、大功率發射機技術和制冷接收機技術。
(1) 大口徑天線技術
提高人們與探測器溝通能力比較快的途徑是在地球上修建更大口徑的天線。我國正在進行FAST射電望遠鏡的建設,它是世界最大單口徑射電望遠鏡[12]。另外,我國正在籌劃新疆奇臺110 m世界最大的全向可轉動射電望遠鏡,工作頻段覆蓋150 MHz~115 GHz,可用于支持深空探測器的數據接收[13]。
(2) 天線組陣
由于體積、結構、加工、重量和安裝等各方面的限制,地面站單個天線的口徑不可能無限擴大。利用大量較小口徑天線進行組陣以增加等效天線口徑是一種可行辦法。NASA在深空探測任務中多次采用了天線組陣技術。比如在旅行者二號探測海王星期間,NASA利用國家射電天文臺甚大陣的27個直徑25 m的天線,與戈爾德斯頓深空站的1個70 m、2個34 m天線進行組陣,以21.6 kb/s速率接收了從海王星傳回的一些旅行二號拍攝的高品質圖像[14]。
我國也在積極進行天線組陣的技術驗證。在嫦娥工程的CE5-T1任務中,使用4個12 m天線接收數傳信號,在Eb/N0約為1.3 dB時,合成效率達到99.8%。嫦娥工程CE2任務中,利用VLBI的4個天線做異地合成實驗,在平均Eb/N0<1 dB時,合成效率達到99.23%。對于大規模天線組陣系統來說,單個天線接收信號十分微弱,這對信號合成技術提出了更高的要求。
在研究實踐下行天線組陣技術的同時,我國也在積極進行上行天線組陣技術研究及實踐。更高的上行鏈路的傳輸能力對于未來任務操作很重要,尤其是對于異常情況下的任務操作,可以通過提高發射功率或研制上行鏈路天線陣的方法解決這個問題。Ka等高頻段上行組陣的技術困難包括:各天線傳輸路徑中大氣延時隨時在變化、天線運動過程中的相心變化、電子設備的時延變化和各天線間的時頻同步變化,這些變化的補償精度直接影響上行組陣的空間合成效率和開環持續工作時間。上行天線組陣要求時頻同步精度能夠達到ps量級,實驗中達到了優于1 ps的精度要求[15]。
(3) 大功率發射機
發射機是深空探測地面站重要的組成部分,是實現上行能力擴展的關鍵設備。目前的深空發射機,ESA在S及X頻段達到20 kW輸出功率[16],俄羅斯在X、C、P頻段的輸出功率分別達到40 kW、50 kW、200 kW[17],NASA在S、X頻段最大輸出功率分別可達400 kW、100 kW,NASA行星雷達系統X頻段連續波發射機輸出脈沖功率達到1 MW[18],日本在S及X頻段達到40 kW輸出功率[19]。
未來的深空任務中,需要5 kW以上的Ka頻段連續波發射機提高上行傳輸能力,需要X頻段350 kW~2 MW功率的應急發令、需要幾MW的脈沖發射機來完成太陽系邊界及星際飛行通信。
(4) 制冷接收機
接收機前端工作在低溫環境,能夠有效降低接收系統的噪聲溫度,提高系統的接收能力。目前噪聲最小的器件是行波脈澤放大器(TWM),它能把沿調諧紅寶石晶體長度傳播的信號放大。TWM中的噪聲取決于寶石晶體的物理溫度,深空網中的這些晶體工作在4.2 K的液氦池中。
目前深空網用的較多的是冷卻到約15 K的高電子遷移率晶體管(HEMT),雖然指標稍差,但將HEMT冷卻到15 K的制冷設備要比TWM制冷設備簡單得多。國內Ka波段整體饋源制冷低溫接收機噪聲溫度小于45 K[20]。
4結束語
星際探索任務具有距離遠、信號微弱、任務時間長、工作過程復雜、環境條件復雜、未知因素多的特點。因為這些特點,對參與任務的電子設備提出了很多苛刻、甚至看上去不可能達到的要求。正是這些新要求,推動了電子技術在理論、設計、材料、工藝、加工和可靠性等各個方面的發展,取得原來不可想象的技術進步。
參考文獻
[1]劉悅.飛的最遠的旅行者-1[J].國際太空,2013(11):1-4.
[2]快訊.日本成功回收“隼鳥”號小行星探測器的返回艙[J].飛行器測控學報,2010,29(3):20-24.
[3]袁崇煥.“隼鳥”歷險記——日本“隼鳥”號飛船探測小行星紀實[J].探索,2005(12):15-22.
[4]顧風.日本“隼鳥”成功著陸[J].決策與信息,2010(8):7.
[5]杭燕玲.飛行器拒絕死亡[J].大自然探索,2002(11):2-5.
[6]張揚眉.性能優異的美國“火星科學實驗室”[J].國際太空,2011(11):17-23.
[7]NASA.NASA Technology Roadmaps:Communication and Navigation Final[DB/OL].(2015-05)http://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_5_communication_navigation.pdf 2015 NASA Technology Roadmaps TA 5.
[8]NASA.NASA Technology Roadmaps:Space Power Energy Storage Final[DB/OL].(2015-05)http://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_3_space_power_energy_storage.pdf 2015 NASA Technology Roadmaps TA 3.
[9]劉慶會.天馬望遠鏡在嫦娥三號測定軌VLBI觀測中的應用分析[J].中國科學:物理學 力學 天文學,2015(3):1-9.
[10]NASA.NASA Technology Roadmaps:Modeling Simulation Final[DB/OL].(2015-05) http://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_3_space_power_energy_storage.pdf 2015 NASA Technology Roadmaps TA 11.
[11]王奔.太陽系邊界的探索-記艾德·斯通36年的“旅行者”計劃心路[J].世界科學,2013(9):48-51.
[12]莊芳.世界最大單口徑“天眼”首個反射面單元成功拼裝[N].河北日報,2015-08-03(1).
[13]王娜.新疆奇臺110射電望遠鏡[J].中國科學:物理學 力學 天文學,2014(8):783-794.
[14]BAGRI D S.Pros and Cons of Using Arrays of Small Antennas Versus Large Single-Dish Antennas for the Deep Space Network[R].IPN PR 42-174,Jet Propulsion Laboratory,Pasadena,California,2008:1-14.
[15]李晶.反饋控制器對頻標傳遞系統的性能研究[J].無線電工程,2015,45(4):12-15.
[16]MARTIN R,WARHAUT M.ESA′s 35-meter Deep Space Antennas at New Norcia/Western Australia and Cebreros/Spain[C]//Aerospace Conference,2004:1 124-1 133.
[17]李平,張紀生.俄羅斯深空測控通信技術的發展及現狀[J].電訊技術,2003(4):1-8.
[18]FREILEY A J,CONROY B L,HOPPE D J.Bhanji A.M.Design Concepts of a 1 MW CW X-band Transmit/Receive System for Planetary Radar[J].Microwave Theory and Techniques,IEEE Transactions on,1992(6):1 047-1 055.
[19]汪桂華.日本深空探測與深空測控技術[J].電訊技術,2003(3):1-5.
[20]王自力,劉敏.Ka頻段低溫接收機[J].飛行器測控學報,2014(3):225-230.
[21]吳偉仁,董光亮,李海濤.深空測控通信系統工程與技術[M].北京:科學出版社,2013.

耿虎軍男,(1971—),碩士,研究員,畢業于西安電子科技大學信息與通信工程專業,中國電子科技集團公司第五十四研究所副總工程師,總裝導彈航天測控通信專家組專家,全國“五一”勞動獎章獲得者。主要研究方向為航天測控專業,從事航天測控關鍵技術和系統總體研究。
參加過多項國家重大工程的測控設備研制工作,包括:載人航天工程、北斗導航工程、嫦娥探月工程、中繼衛星工程、風云二號氣象衛星工程、風云四號氣象衛星工程等,擔任多個地面測控系統的總設計師。獲得國防科工局“科學技術進步獎”二等獎、集團公司“科學技術獎”特等獎等多個獎項,獲得國防科技工業局探月工程三期論證優秀個人稱號。
引用格式:耿虎軍.星際探索中的電子技術[J].無線電工程,2016,46(1):1-7,49
Electronic Technology Throughtout Interstellar Exploration
GENG Hu-jun1,2
(1.The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China;
2.CETCKeyLaboratoryofSpaceInformationApplicationTechnology,ShijiazhuangHebei050081,China)
AbstractA variety of deep space explorers are widely enlarging the cognition range of human being.By analyzing the success and failure of several typical deep space exploration activities,this paper summarizes the role of electronic technology in interstellar exploration missions,and analyzes the experiences and revelations from electronic equipment application.The function,the performance,the lifetime and the reliability are the factors determining the success or failure of the interstellar exploration missions.The electronic technology has even become a bottleneck in limiting the exploration capability.Finally,this paper discusses the requirements of electronic technology in future deep space exploration mission.
Key wordselectronic technology;interstellar exploration;deep space TT&C;laser communication;interstellar network
作者簡介
收稿日期:2015-10-12
中圖分類號TN923
文獻標識碼A
文章編號1003-3106(2016)01-0001-07
doi:10.3969/j.issn.1003-3106.2016.01.01