旋轉尺蠖壓電電機鉗位機構設計及動力學分析
2016-01-15 05:46:20邢繼春,顧勇飛,李沖等
振動與沖擊 2015年20期
第一作者邢繼春男,講師,1983年4月生
旋轉尺蠖壓電電機鉗位機構設計及動力學分析
邢繼春,顧勇飛,李沖,許立忠
(燕山大學機械工程學院,河北秦皇島0660045)
摘要:提出旋轉尺蠖壓電電機,該電機具有結構簡單、定位精度高、輸出力矩大、能實現微動壓電電機大行程等優點。分析其驅動原理及關鍵部件鉗位機構設計方案;考慮杠桿位移放大梁及長柔梁彎曲、扭轉振動變形,建立鉗位機構動力學模型,獲得前8階固有頻率及模態函數;討論鉗位機構結構參數對固有頻率影響規律,并實驗驗證理論分析的正確性。
關鍵詞:尺蠖原理;壓電電機;鉗位機構;自由振動
基金項目:秦皇島市科學技術研究與發展計劃項目(201302A026);燕山大學青年教師自主研究計劃課題(13LGB002)
收稿日期:2014-07-22修改稿收到日期:2014-10-11
中圖分類號:TH113.1
文獻標志碼:A
DOI:10.13465/j.cnki.jvs.2015.20.025
Abstract:A rotary inchworm piezoelectric motor was presented. The driving principle of the motor and the configuration design of the clamping mechamisms were introduced. Considering the bending and torsion deformations of a lever amplifcation beam and a long flexible beam, the dynamic model of clamping mechamisms was established. The first eight natural frequencies and modal functions were given. The effects of structure parameters of clamp mechanisms on the natural frequencies were discussed. The test results illustrate the correctness of the theoretical analysis.
Clamp mechanisms design and dynamics analysis of rotary inchworm piezoelectric motor
XINGJi-chun,GUYong-fei,LIChong,XULi-zhong(Yanshan University, College of Mechanical Engineering, Qinhuangdao 066004, China)
Key words:inchworm principle; piezoelectric motor; clamp mechanism; free vibration
超精密驅動與控制技術正向智能化、集成化、多樣化、微型化方向發展[1]。而利用壓電材料逆壓電效應的壓電精密驅動器以具有定位精度高、輸出力大、響應速度快、結構形狀多樣化,設計靈活、結構簡單、易于微型化、直接驅動、能耗低、發熱少、無需潤滑維護、可用于真空、不受磁場影響等優點在眾多超精密驅動器中脫穎而出[2]。
尺蠖壓電電機具有大行程,且與高精度高分辨率兼容較好,能克服慣性沖擊式壓電電機輸出力矩小缺點,已成功用于精密驅動領域。因現有尺蠖壓電電機中大多為直線型微位移驅動器[3],將尺蠖壓電驅動機理用于精密旋轉驅動技術實例較少,因而限制其在微動精密控制領域的應用[4-6]。
本文提出的新型旋轉尺蠖壓電電機,具有結構簡單、定位精度高、輸出力矩大、能實現微動壓電電機大行程等優點。其中鉗位機構作為夾持電機轉子的關鍵部件其振動穩定性及動力學問題直接影響電機驅動性能。因此,通過探索尺蠖旋轉壓電電機關鍵部件鉗位機構設計及動力學模型建立,給出鉗位機構固有頻率及模態函數求解方法,分析結構參數對鉗位機構的動力學性能影響,為旋轉尺蠖壓電電機設計開發提供理論依據。
1電機驅動原理
旋轉尺蠖壓電微動電機主要由轉子、鉗位機構、底板、驅動機構、基座、底座組成,見圖1。
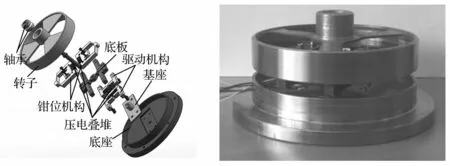
圖1 旋轉尺蠖壓電電機 Fig.1 Rotory inwormch piezoelectric motor
驅動原理見圖2,時序驅動信號見圖3。①對壓電疊堆1(a)輸入圖3(a)的時序信號致其伸長,鉗位機構2(a)頂住轉子;②將壓電疊堆1(b)輸入圖3(b)的時序信號致其伸長,由于驅動機構利用杠桿位移放大原理,使驅動機構3(a)彎曲,鉗位機構2(a)利用與轉子間摩擦力帶動轉子5順時針轉過一定角度θ;③將壓電疊堆1(c)輸入圖3(c)的時序信號致其伸長,鉗位機構2(b)頂住轉子后逐個撤銷壓電疊堆1(a)、1(b)的電壓信號(圖3(a)、(b)),鉗位機構2(a)及驅動機構3(a)恢復原狀。此時鉗位機構2(b)帶動轉子轉過角度θ;④將壓電疊堆1(d)輸入圖3(d)的時序信號后致其伸長,驅動機構3(b)彎曲,鉗位機構2(b)帶動轉子順時針轉過度θ。逐個撤銷壓電疊堆1(c)、1(d),鉗位機構2(b)及驅動機構3(b)恢復原狀。轉子共轉過角度3θ,電機完成一個周期動作,時序信號又回到初始狀態,壓電疊堆1(a)開始伸長,重復上周期動作實現完整的連續運動。
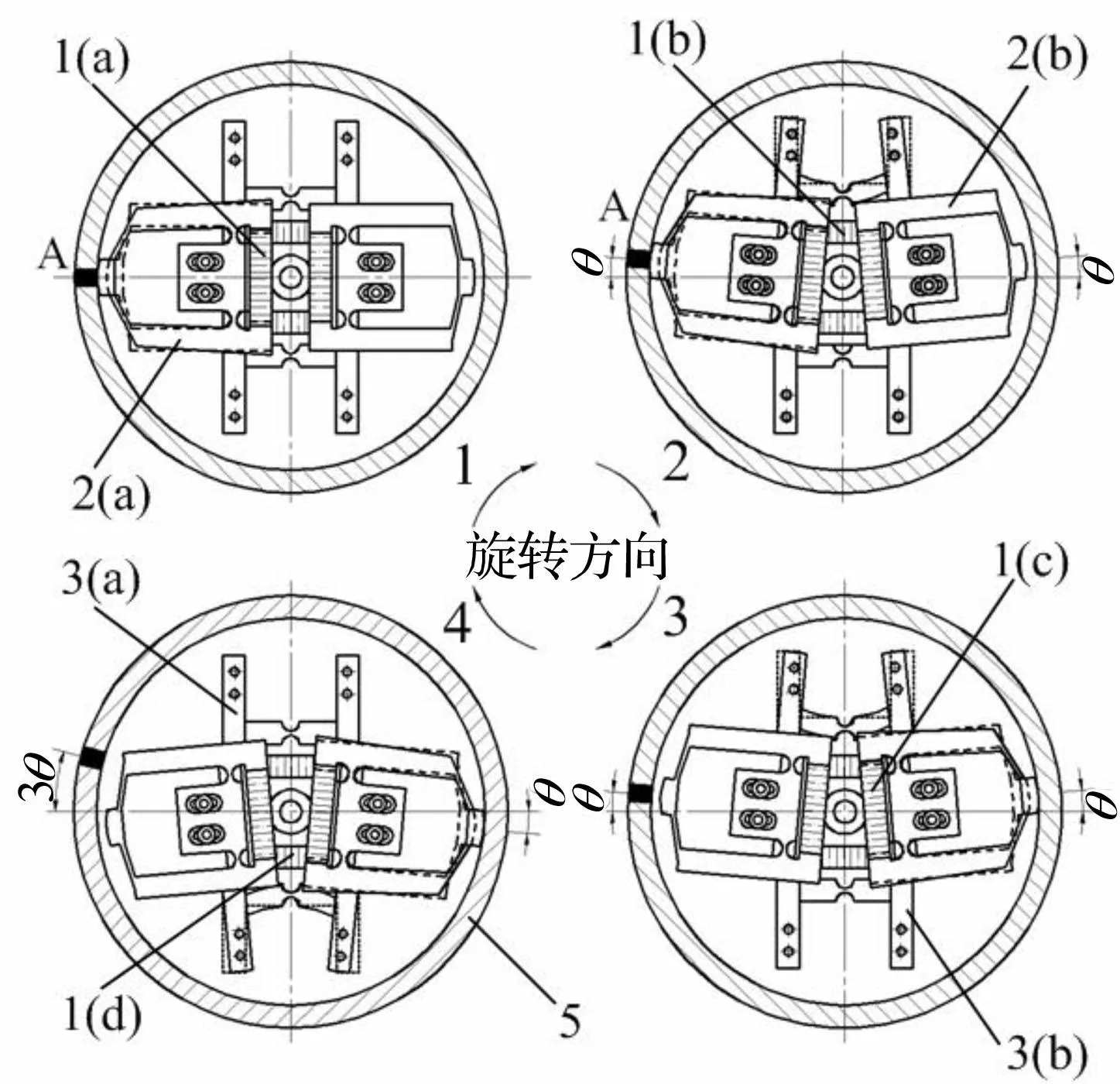
圖2 驅動原理示意圖 Fig.2 Driving principal schematic
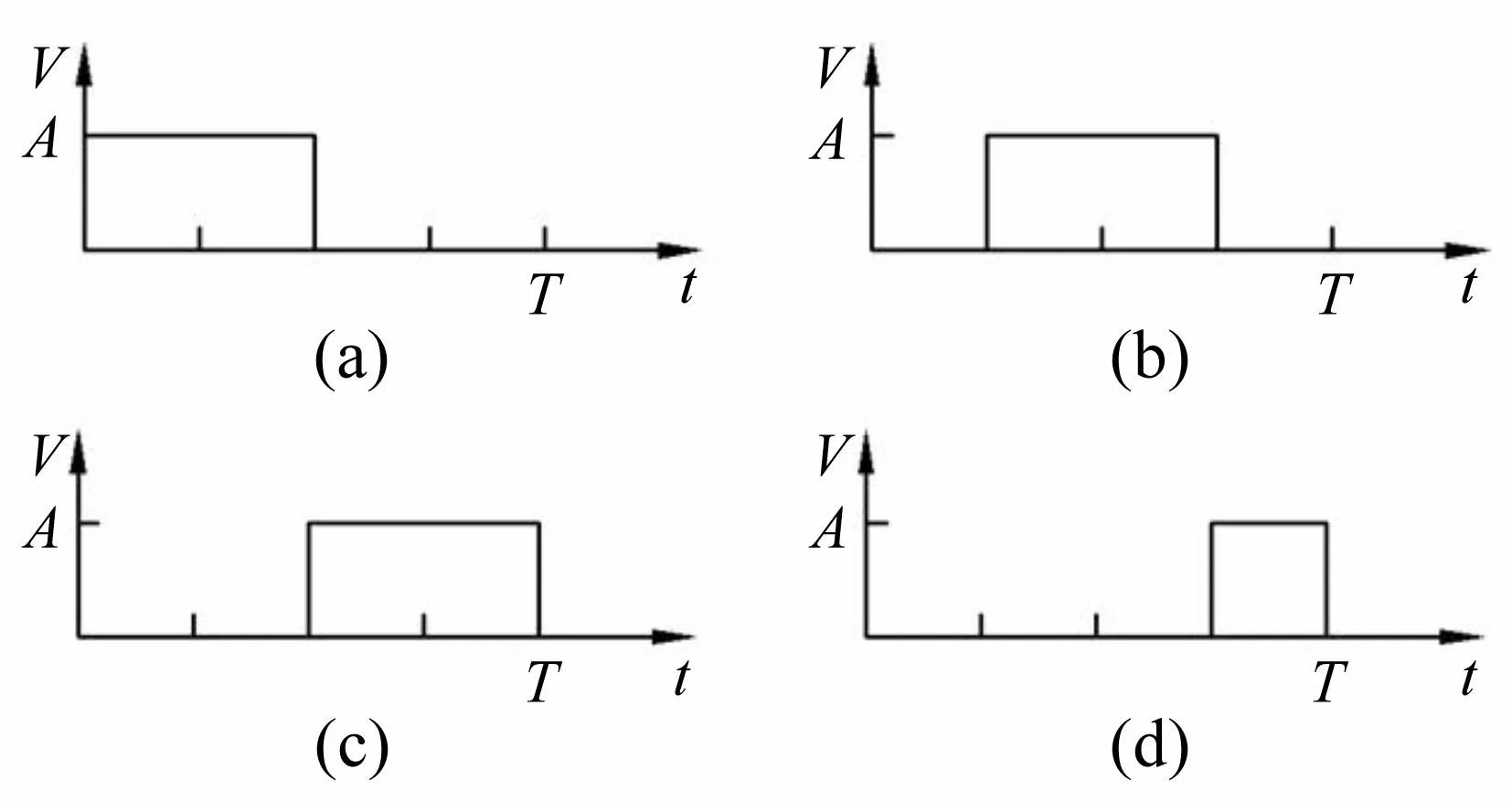
圖3 時序驅動信號 Fig.3 Driving signal
2鉗位機構設計及位移放大原理
旋轉尺蠖壓電電機關鍵部件鉗位機構利用柔性機構彈性變形實現壓電陶瓷輸出位移的放大及轉子轉動夾持。鉗位機構采用對稱結構集成杠桿位移放大及三角位移放大原理見圖4。
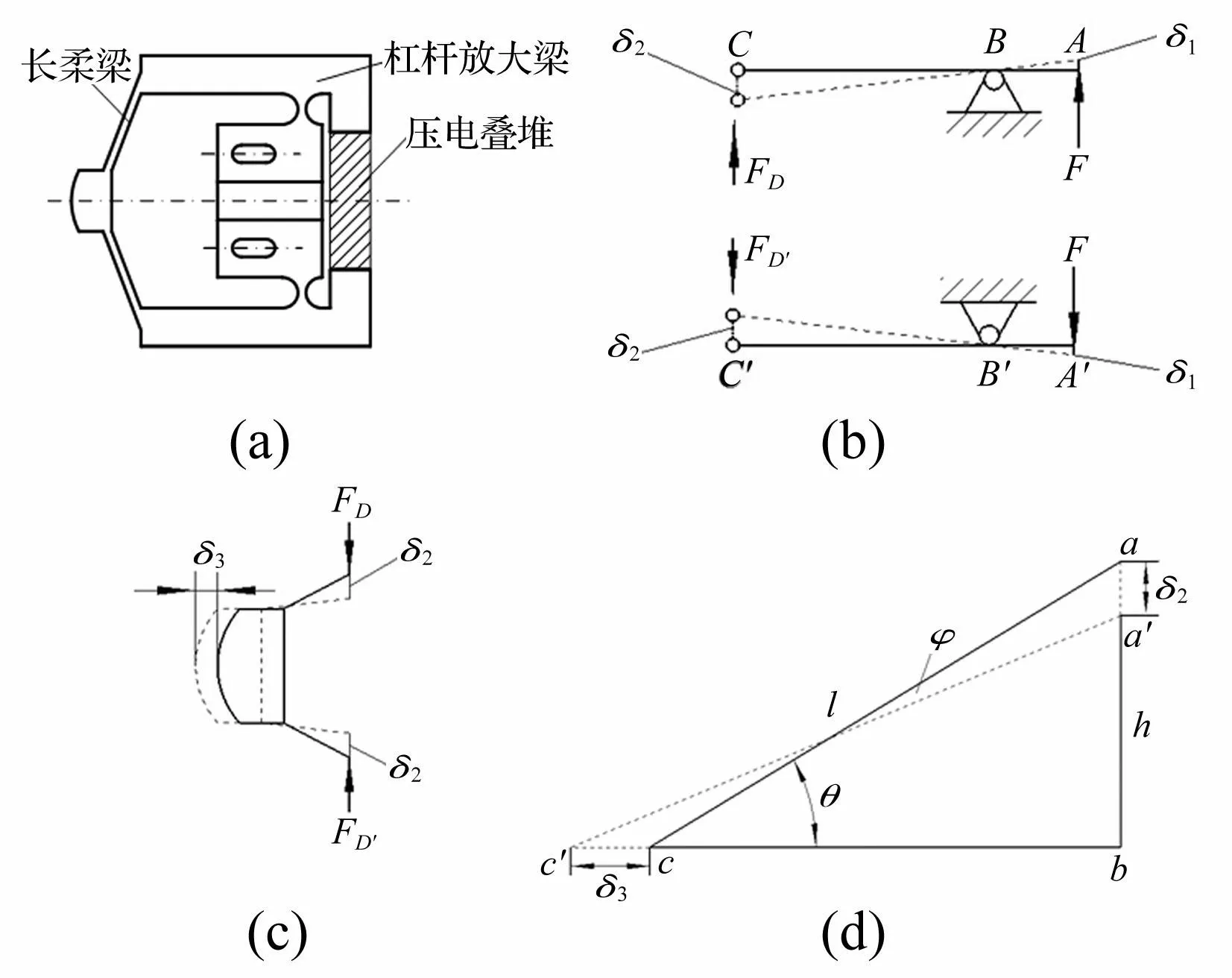
圖4 位移放大原理 Fig.4 Displacement amplifier principal
由圖4(b),當在A點處施加作用力F時忽略A點水平位移,設A點垂直位移為δ1;因B點繞鉸鏈轉動,由杠桿放大原理知C點位移為δ2,則放大倍數為
(1)
鉗位機構采用對稱式結構可提高系統剛度、消除C及C′點附加位移,故該兩點位移為δ2。根據三角放大原理,當C及C′點發生垂直位移δ2時,鉗位機構前端會發生水平位移δ3,不僅可將垂直平位移轉換成水平位移,且位移得到放大。該過程已忽略結構變形影響,見圖4(c)、(d)。D點未產生位移前長柔梁、水平線及垂直線組成△acb。當a點移動位移δ2到達a′時c點移動到c′產生位移δ3,而長柔梁水平夾角θ減小一微小角度,φ由幾何圖中關系可得

(2)

(3)
式中:L為梁長。
設放大倍數為β,得
(4)
由于鉗位機構變形因有壓電疊堆激勵后伸長產生,變形量較小,遠小于桿長,故減小的角度φ較小。則無窮小量sinφ≈φ,1-cosφ≈φ2/2。因此,式(4)簡化為
(5)
由式(5)看出,鉗位機構長柔梁放大倍數β與l無關,近似等于桿與水平位置夾角的正切值。鉗位機構將壓電疊堆變形通過杠桿、三角放大后,總放大倍數η為
η=αβ
(6)
3鉗位機構自由振動分析
3.1動力學模型簡化
電機運行時鉗位機構變形主要發生于杠桿放大梁與長柔梁,且該結構具有對稱性,故取其一半進行動力學研究。簡化鉗位機構動力學模型并假設:
(1)杠桿放大梁長度小于截面高度5倍,考慮截面剪切及轉動慣量,認為該梁段為鐵木辛柯梁。
(2)杠桿位移放大梁右端部分設為集中質量m。
(3)考慮杠桿位移放大梁柔性鉸鏈彎曲變形,忽略拉伸變形,將柔性鉸鏈設為鉸鏈與卷簧組合,卷簧剛度為K,利用直圓型柔性鉸鏈轉動剛度公式[7]
式中:E為鉗位機構材料彈性模量;b為鉸鏈寬度;t為凹口處最小厚度;R為切口半徑。
(4)將長柔梁右端簡化為固定端,見圖5(a)。
(5)同時考慮杠桿放大梁及長柔梁彎曲、縱向振動變形,將簡化后動力學模型分解為兩部分均勻梁,并按圖5(b)中x1,y1,x2,y2方向分別建立笛卡爾局部坐標系,原點為B(C)。
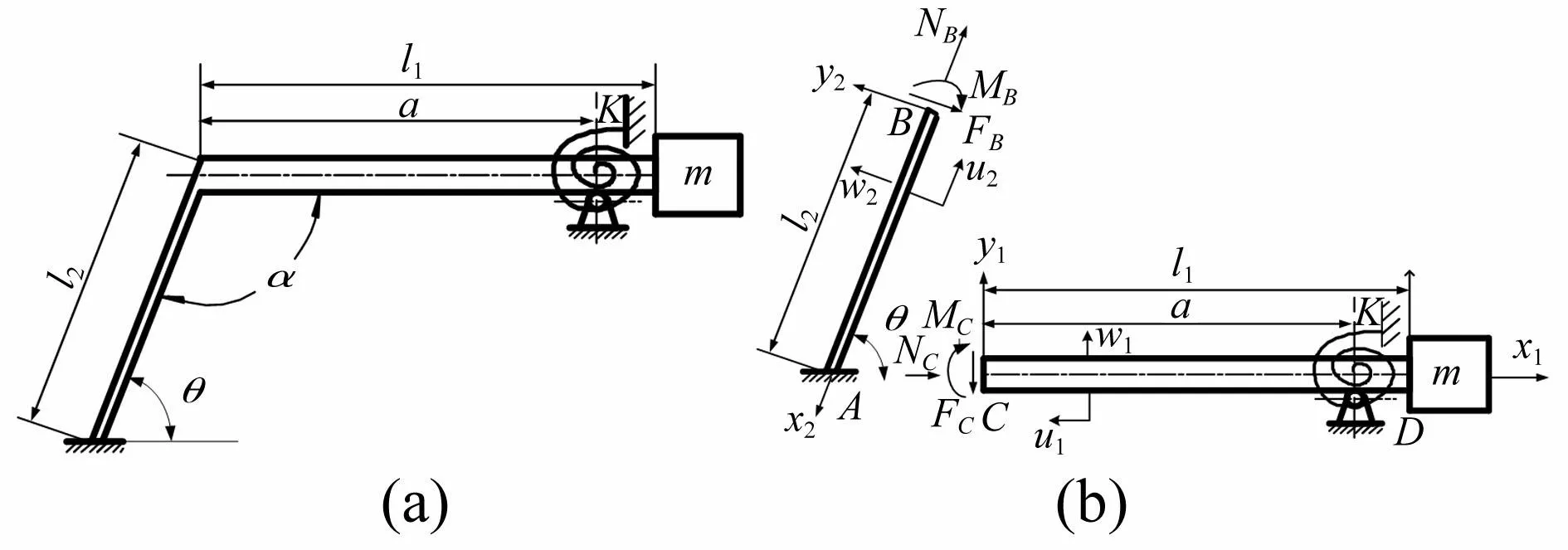
圖5 鉗位機構動力學模型 Fig.5 Dynamic model of clamp mechanism
3.2梁縱向振動
設梁長為li(i=1,2),截面積為Si,材料密度、彈性模量為ρ,E。忽略振動過程中橫向變形,即橫截面保持平面。設ui(xi,t)表示梁上距原點x處在t時刻縱向位移,則動力學方程為
(7)
式中:c2=E/ρ。
用分離變量法將ui(xi,t)表示為φui(xi)q(t),則梁縱向振動模態函數為
φui(x)=D1icos(βxi)+D2isin(βxi)
(8)
式中:β2=ρω2/E。
3.3杠桿放大梁彎曲自由振動
考慮杠桿放大梁為等截面鐵摩辛柯梁,其自由振動方程為
(9)
式中:w1(x1,t)為梁橫向位移;κ為截面形狀因數;G為剪切模量;I1為極慣性矩。
僅考慮截面轉動慣量影響忽略剪切變形,式(9)可簡化為
(10)
將方程解w1(x1,t)分離變量,寫成φw1(x1)q(t)梁彎曲振動模態函數,設一般形式為
φw1(x)=C1cos(s1x1)+C2sin(s1x1)+
C3cosh(s2x1)+C4sinh(s2x1)
(11)

γ4=ρS1ω2/EI1;δ2=ρω2/E。
3.4長柔梁彎曲自由振動
設梁長為l2,材料密度、彈性模量分別為ρ及E,截面積及極慣性矩為S2(x2)、I2(x2),利用達朗伯原理得彎曲振動方程為
(12)
將方程解w2(x2,t)分離變量,寫成φw2(x2)q(t)梁彎曲振動的模態函數,一般形式為
φw2(x)=B1cos(px2)+B2sin(px2)+
B3cosh(px2)+B4sinh(px2)
(13)
式中:p4=ρS2ω2/EI2。
3.5邊界條件
長柔梁(圖5)固定端A點邊界條件為
(14)
質量塊m距鉸鏈較近,可認為a≈l1。杠桿放大梁D端邊界條件為
(15)
在鉗位機構兩桿結合處B(C)點,據彈性體連續性及力平衡性條件,考慮兩桿伸縮、彎曲關系,可得在連接點B-C處連續性條件為
(16)
式中:ζB,ζC分別為B、C點轉角。
連接點B-C的力平衡條件為
(17)
因此,系數A1i,A2i,Cj,Bj(j=1,2,3,4)及參數ω應滿足的頻率方程由梁邊界條件確定。
4結構分析
4.1固有頻率及模態函數
鉗位機構材料為黃銅,結構參數見表1。用以上動力學方程求得鉗位機構自由振動固有頻率及模態函數,見表2及圖6。由圖6看出,①所得鉗位機構固有頻率隨模態階數增加非線性增加,其中第四與第五階、第六與第七階模態較接近分別相差333 Hz、109 Hz。②在鉗位機構前五階模態中,兩部分梁的縱向振動模態存在一個峰值,隨固有頻率增加振動模態峰值由原點向x1(x2)方向移動,且一、三階模態中杠桿放大梁的縱向振動最大變形量大于長柔梁。③由于長柔梁厚度h2小于杠桿放大梁厚度h1,因此隨固有頻率增加同階模態中長柔梁彎曲振動模態函數出現峰值個數及振動模態峰值大于杠桿放大梁。

表1 結構參數

表2 固有頻率(Hz)
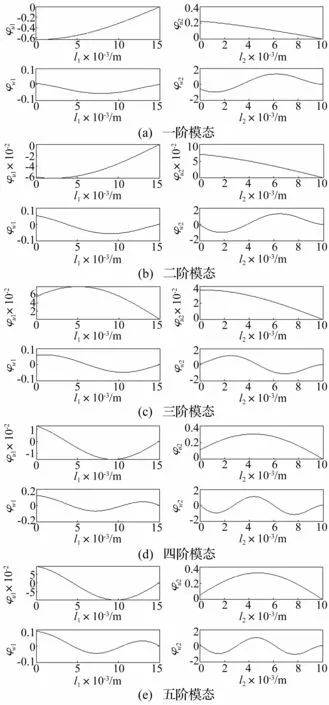
圖6 模態函數 Fig.6 Mode function
4.2靈敏度分析
利用表1分別改變系統參數θ、l1、l2、h1、h2及鉸鏈凹口處最小厚度t,分析其對鉗位機構固有頻率及模態函數影響規律,見圖7。由圖7看出,①長柔梁水平夾角θ在50°~80°間變化時鉗位機構一、二階固有頻率非線性增大,而三階則非線性減小。②改變杠桿放大梁長度l1、厚度h1,長柔梁長度l2、厚度h2時(圖7(b)~(f)),鉗位機構固有頻率呈不規則鋸齒狀變化。在l1、h1、l2、h2某些變化區間,隨l1、l2增加固有頻率非線性有規律降低;隨h1、h2增加固有頻率非線性有規律增加,而相鄰區間固有頻率發生突變。因鉗位機構模態振型在參數變化到某值時發生模態振型突變。③杠桿放大梁鉸鏈凹口處最小厚度t在0.5~2 mm間變化時,鉗位機構固有頻率緩慢增加,隨階數增加固有頻率增加趨勢明顯。
5實驗
圖8為利用SZCJ捶擊法振動測試系統對旋轉尺蠖壓電電機鉗位機構前三階固有頻率進行測試,測試結果見圖9。本實驗用激振力錘作為振動源,激振時要求盡量避免各次錘擊形成規定的節拍。據香農采樣定理,要求采樣頻率至少應為信號本身所含最高頻率的2.54倍~6倍,取采樣頻率10 000 Hz,采樣時間0.2 s。當激勵信號在脈沖結束后主要成分為噪聲。隨時間增加信/噪比不斷降低。此時須加特殊窗函數,對相應信號加指數窗,對力信號加力窗,以提高頻率響應函數計算的精度及信/噪比。將測試系統所得鉗位機構前三階固有頻率與理論計算結果相比獲得理論分析計算結果相對偏差,見表3。由表3看出,理論值與測量值前三階相對偏差分別為2.7%、4.6%、4.0%,均小于5%,從而驗證理論分析的正確性。
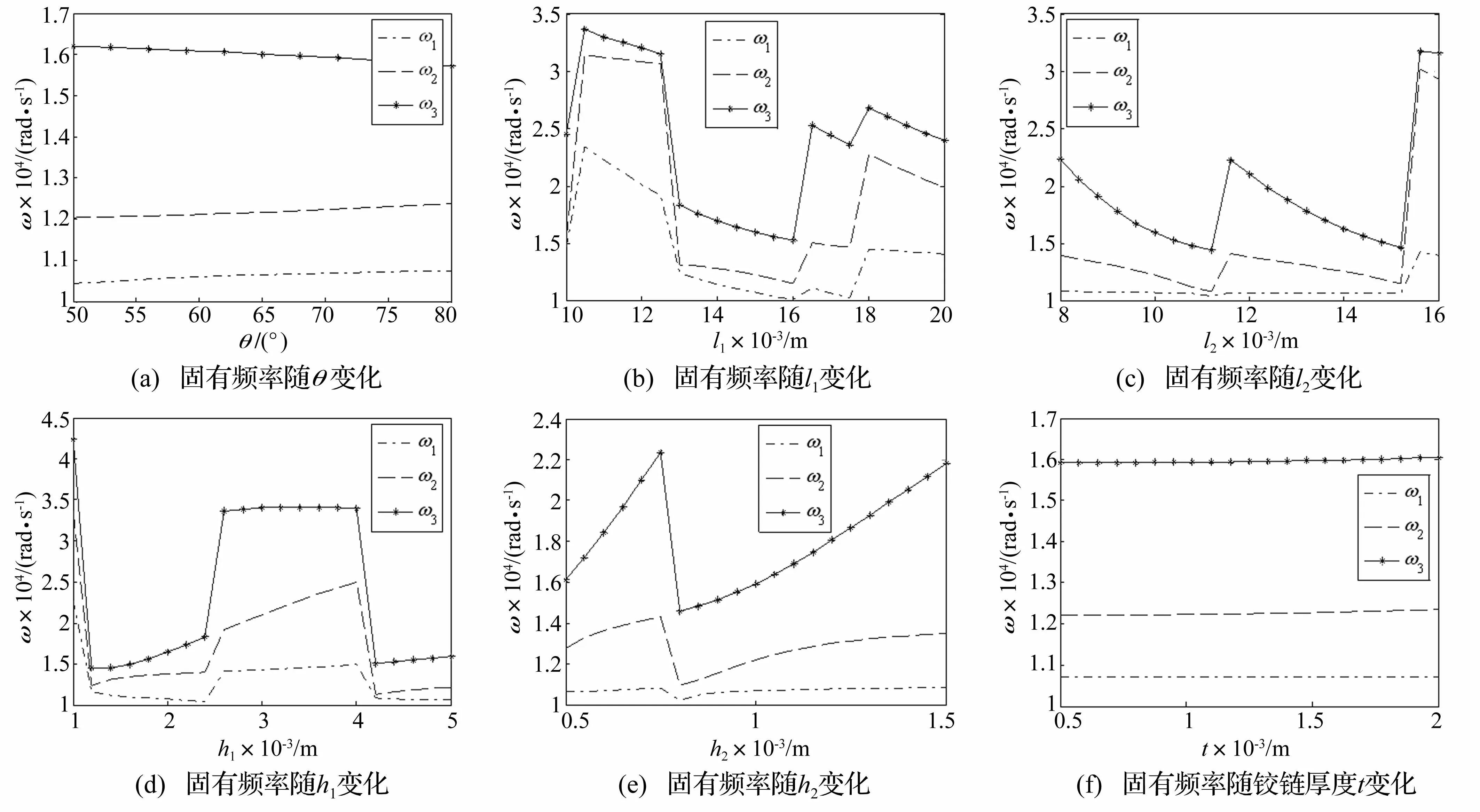
圖7 固有頻率隨參數變化 Fig.7 The natural frequency changing with parameters
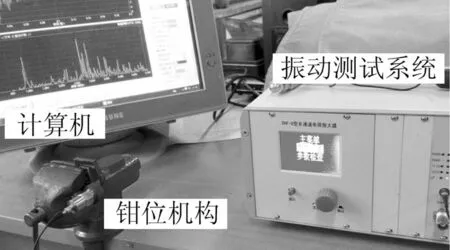
圖8 捶擊法固有頻率測試系統 Fig.8 Impact hammer modal testing
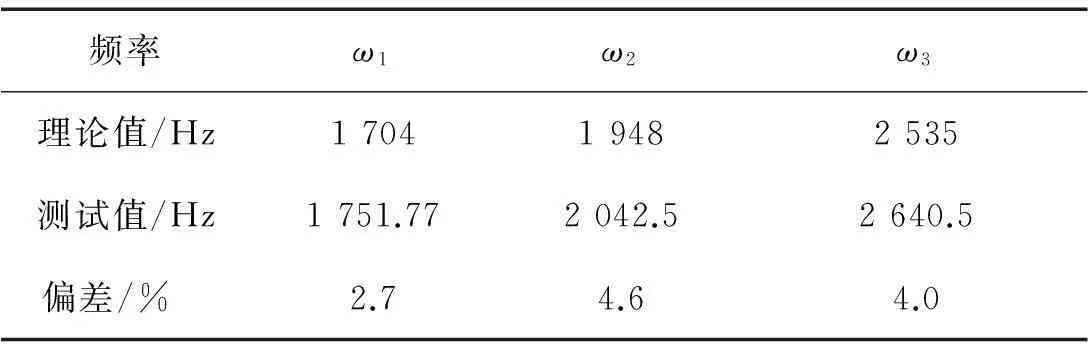
頻率ω1ω2ω3理論值/Hz170419482535測試值/Hz1751.772042.52640.5偏差/% 2.74.64.0
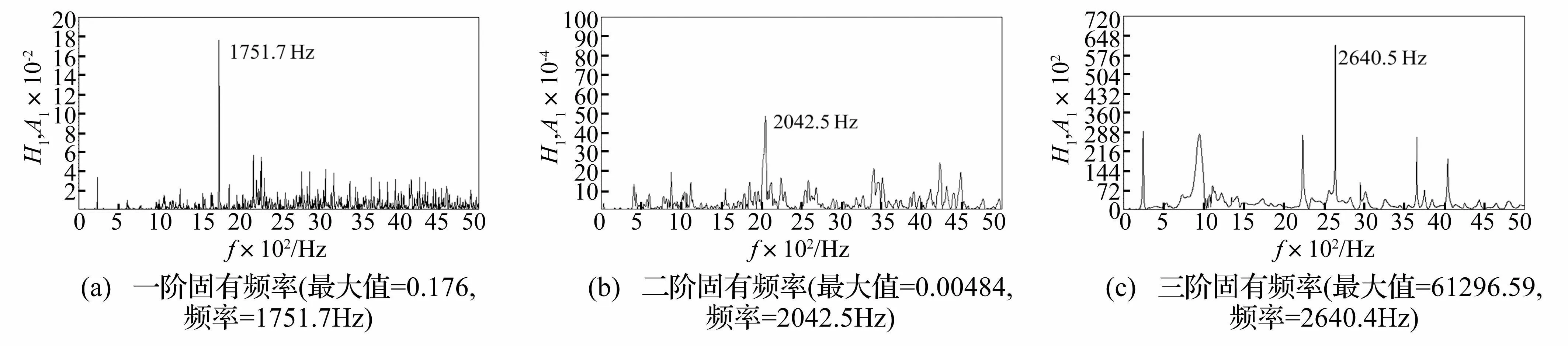
圖9 測試結果(采樣頻率10 000 Hz) Fig.9 Test results
6結論
(1)給出旋轉尺蠖壓電電機驅動原理,分析鉗位機構設計方案及位移放大倍數。建立旋轉尺蠖壓電電機鉗位機構動力學模型,求得鉗位機構固有頻率與模態函數。
(2)通過改變鉗位機構參數、分析固有頻率變化規律知,固有頻率隨θ增大,鉗位機構一、二階固有頻率非線性增大,三階固有頻率非線性減小;固有頻率隨結構參數變化呈不規則鋸齒狀變化。
(3)理論計算結果與用捶擊法測得鉗位機構固有頻率小于5%,驗證理論分析的正確性。
參考文獻
[1]Takaya Y. Fundamental study on the new probe technique [J].Measurement, 1999, 25(1):9-18.
[2]馬立,周莎莎,王坤.行走式尺蠖壓電直線驅動器研究現狀及關鍵技術綜述[J]. 微電機,2012, 45(7):82-85.
MA Li, ZHOU Sha-sha, WANG Kun. State-of-the-art and key technologies in piezoelectric linera actuator of walker inchworm [J]. Micromotor, 2012, 45(7): 82-85.
[3]Itatsu Y, Torii A, Ueda A. Inchworm type microrobot using friction force control mechanisms[C]. Micro-Nano Mechatronics and Human Science (MHS), International Symposium on,2011:273-278.
[4]Duong K, Garcia E. Development of a rotary inchworm piezoelectric motor[J]. Smart Structures and Materials: Smart Structures and Integrated Systems,1995(2443): 752-788.
[5]Kima S C, Kim S H. Precise rotary motor by inchworm motion using dual wrap belt[J]. Review of Scientific Instruments, 1990, 70(5): 2546-2550.
[6]趙宏偉,吳博達,程光明,等. 基于壓電驅動的精密步進旋轉電機[J]. 中國電機工程學報,2006, 26(10): 166-171.
ZHAO Hong-wei, WU Bo-da, CHENG Guang-ming, et al. Precise stepping rotary motor based on piezoelectric actuation[J]. Proceedings of the CSEE, 2006, 26(10): 166-171.
[7]Wu Ying-fei, Zhou Zhao-ying. Design calculations for flexure hinge[J]. Review of Scientific Instruments,2002,73: 3101-3106.