基于相移陷波器的磁軸承不平衡振動全頻自適應控制
2016-01-15 05:46:14崔培玲,趙光再,房建成等
振動與沖擊 2015年20期
第一作者崔培玲女,博士,副教授,1975年4月生
基于相移陷波器的磁軸承不平衡振動全頻自適應控制
崔培玲1,2,趙光再1,2,房建成1,2,李海濤1,2
(1. 北京航空航天大學 儀器科學與光電工程學院,北京100191; 2. 慣性技術重點實驗室,北京100191)
摘要:為全轉速范圍內消除磁懸浮轉子不平衡質量產生的不平衡振動力,提出基于相移陷波器的不平衡振動全頻自適應控制方法。直接以構造的軸承力作為相移帶通濾波器輸入,將濾波器輸出反饋至控制系統構成相移陷波器,達到消除振動力目的。該過程無需考慮功放低通特性對同頻成分影響;通過對系統靈敏度函數理論分析,在不同轉速下自適應調節相移角,實現全轉速范圍內系統穩定。結果表明,該方法能在全頻范圍內有效地消除同頻軸承力。
關鍵詞:磁懸浮轉子;不平衡振動;相移陷波器;全頻
基金項目:國家自然基金(61121003, 61203112);國家民用航天預研項目
收稿日期:2014-04-18修改稿收到日期:2014-09-16
中圖分類號:TH133
文獻標志碼:A
DOI:10.13465/j.cnki.jvs.2015.20.004
Abstract:The mass unbalance of high-speed magnetically suspended rotor causes unbalance force, which induces synchronous vibration. To suppress the vibration effectively within the operating speed range, a method based on a phase-shift notch filter was proposed. The control strategy of the method is that the magnetic bearing force was calculated and taken as the input of the phase-shift band-pass filter and the output of the filter was fed back to the original system, in which the low-pass characteristic of power amplifier doesn’t need to be considered. Meanwhile, based on the theoretical analysis on the sensitivity function of the overall control system, a stable system in the rotating speed range was achieved based on the adaptive adjustment of phase shift in the band-pass filter with respect to rotor speed. The experimental results show the effectiveness of the proposed approach, which can reduce the synchronous magnetic bearing force within the whole frequency range.
Adaptive control of unbalance vibration for magnetic bearings based on phase-shift notch filter within the whole frequency range
CUIPei-ling1,2,ZHAOGuang-zai1,2,FANGJian-cheng1,2,LIHai-tao1,2(1. School of Instrumentation Science and Optoelectronics Engineering, Beihang University, Beijing 100191, China;2. Science and Technology on Inertial Laboratory, Beijing 100191, China)
Key words:magnetically suspended rotor; unbalance vibration; phase-shift notch filter; whole frequency range
磁軸承作為無接觸支承結構,具有無摩擦、無需潤滑、支承剛度主動可控等特點[1-2]在高速電機、分子泵及航天器姿態控制等領域應用廣泛[3-5]。磁懸浮轉子因受限加工精度存在殘余不平衡質量在高速旋轉下產生的不平衡力通過基座傳遞到外部機構易引起振動、噪聲。利用磁軸承主動可控特點可對該振動力進行消除,實現零同頻振動控制。
消除磁懸浮轉子振動力已有諸多研究,主要有兩種實現方式:①以轉子慣性主軸為控制目標,使轉子繞慣性主軸轉動,消除不平衡振動力;②直接以同頻振動力或力矩為目標,通過消除同頻力或力矩實現。第一種需辨識出轉子慣性軸相對參考坐標系位置[6],抑制效果主要取決于慣性主軸位置的辨識精度。不平衡量較小時傳感器安裝及檢測誤差會使其抑制效果不明顯。第二種通過在磁懸浮轉子系統控制回路中加入算法,消除控制電流、位移中同頻成分。Shi等[7]采用最小均方(Least Mean Square, LMS)算法,通過產生等增益、反相位的同頻信號,前饋補償同頻電流,實現同頻電流剛度力消除,但該方法未考慮位移剛度力產生的振動,且因LMS算法步長固定,無法兼顧系統穩定性及收斂速度要求,僅適用某特定轉速范圍。Bi等[8]用重復學習算法通過自適應調節學習增益,雖能實現大轉速范圍內對同頻電流的抑制,但僅消除同頻電流剛度力,未消除同頻位移剛度力,近似零同頻振動控制。劉彬等[9]在電流環中加入同頻位移剛度力補償,實現同頻振動力消除,并在低轉速下用高轉速辨識出的轉子慣性軸位置消除低轉速的同頻振動力,達到整個工作頻率范圍內對同頻力的有效抑制;但該文獻并未考慮功放的低通特性對同頻位移剛度力前饋補償效果影響。而轉速會存在檢測誤差,開環補償的相位誤差會隨時間逐漸積累,補償效果逐漸降低。針對功放的低通特性,魏彤等[10]通過離線測試獲得磁軸承功放參數,在恒定工作轉速下對位移剛度力前饋補償中功放導致的同頻成分幅值衰減及相位滯后進行補償。而功放幅值、相位隨轉速變化,且隨溫度等環境影響產生系統參數攝動,在全轉速下采用功放離線模型難以精確補償因同頻位移剛度力產生的振動[11]。
對此,本文提出基于相移陷波器的磁軸承不平衡振動全頻自適應控制方法。直接以同頻振動力為控制目標,將構造的軸承力輸入至相移帶通濾波器,該濾波器輸出反饋至原控制系統電流環構成相移陷波器,其中相移陷波器為對傳統陷波器的改進。通過在傳統陷波器中引入相移角對定義系統靈敏度函數相位進行有效補償,可解決傳統陷波器影響系統穩定性問題。該陷波器中包含功放環節,能對功放低通特性進行自適應補償,且無需考慮功放對同頻成分影響,達到有效消除同頻振動力目的,并實驗驗證該方法的有效性。
1含不平衡質量的磁懸浮轉子系統模型
磁懸浮轉子模型(文獻[8])見圖 1。設轉子中心面為Π,徑向磁軸承電磁鐵A、B中心面分別為Π1、Π2。A、B的定子中心間連線與Π交于N,轉子幾何軸與Π、Π1、Π2分別交于O、O1、O2,轉子慣性主軸與Π、Π1、Π2分別交于C、C1、C2。在Π內,以N為原點建立慣性坐標系NXY,以O為原點建立以轉子自轉角速度Ω轉動的旋轉坐標系Oεη,見圖 2。
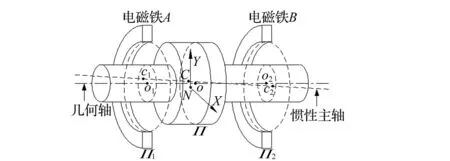
圖1 磁懸浮轉子示意圖 Fig.1 The diagram of magnetically suspended rotor
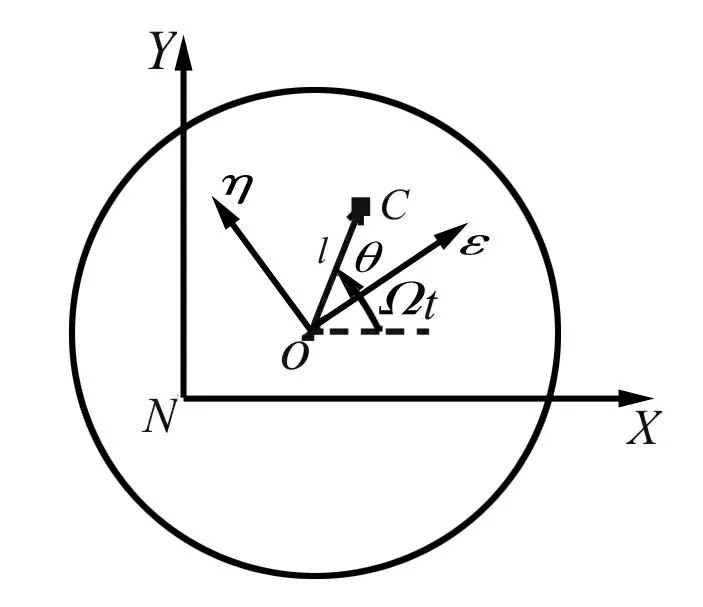
圖2 坐標系示意圖 Fig.2 The coordinate diagram
設OC、O1C1、O2C2長度分別為l、m、n,OC與Oε坐標軸夾角為,O1C1、O2C2在Π上投影與Oε坐標軸夾角分別為α、β,O1、O2、C1、C2在Π上投影在坐標系NXY中的坐標分別為(XA,YA)、(XB,YB)、(xA,yA)、(xB,yB),則有
(1)
(2)
以AX通道為例,徑向磁軸承力FAX在平衡點附近的線性化方程為
FAX=Kh(xAX+ΘAX)+KiiAX[xAX+ΘAX]
(3)
式中:FAX為AX通道徑向軸承力;iAX[xAX+ΘAX]為磁軸承電流;Kh為位移剛度;Ki為電流剛度。
單通道磁軸承控制系統見圖3。該系統由控制器、功放、電磁鐵-轉子組成,傳遞函數分別為Gc(s)、Gw(s)、P(s)。將不平衡質量等效為施加于轉子位移信號中的同頻擾動信號d(t),其拉普拉斯變換為d(s)。
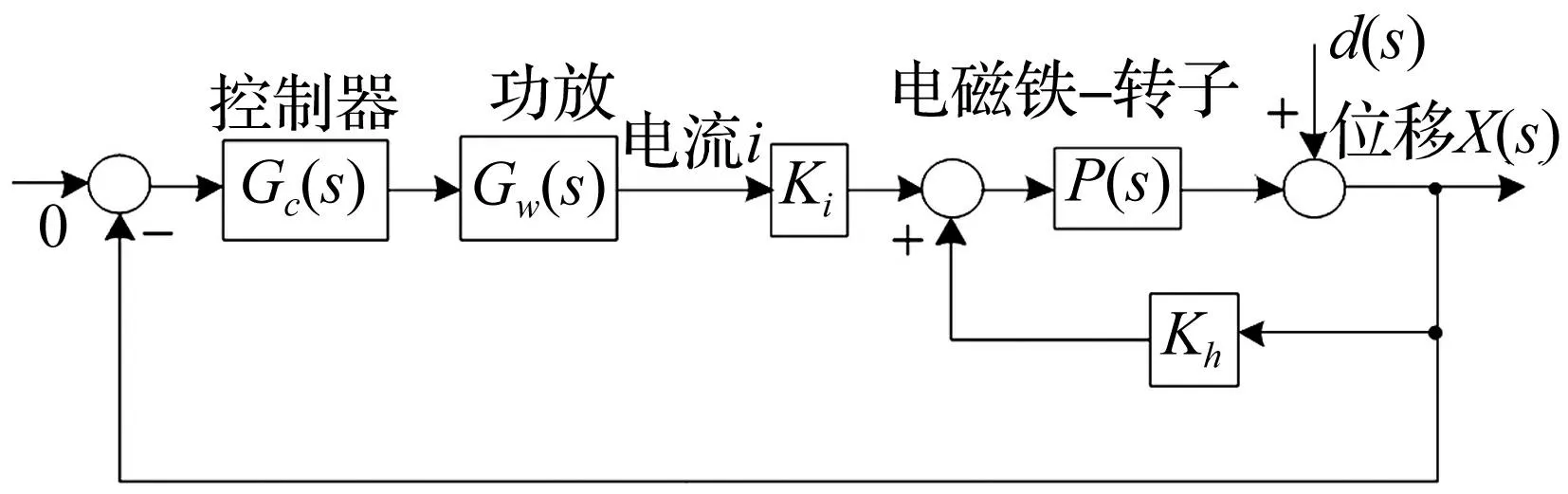
圖3 磁軸承控制系統框圖 Fig.3 The block diagram of magnetic bearing control system
2全頻自適應主動振動控制方法
F(s)=-Kii(s)+KhX(s)=
-KiC(s)[X(s)-Θ(s)]+Kh[X(s)-Θ(s)]
(4)
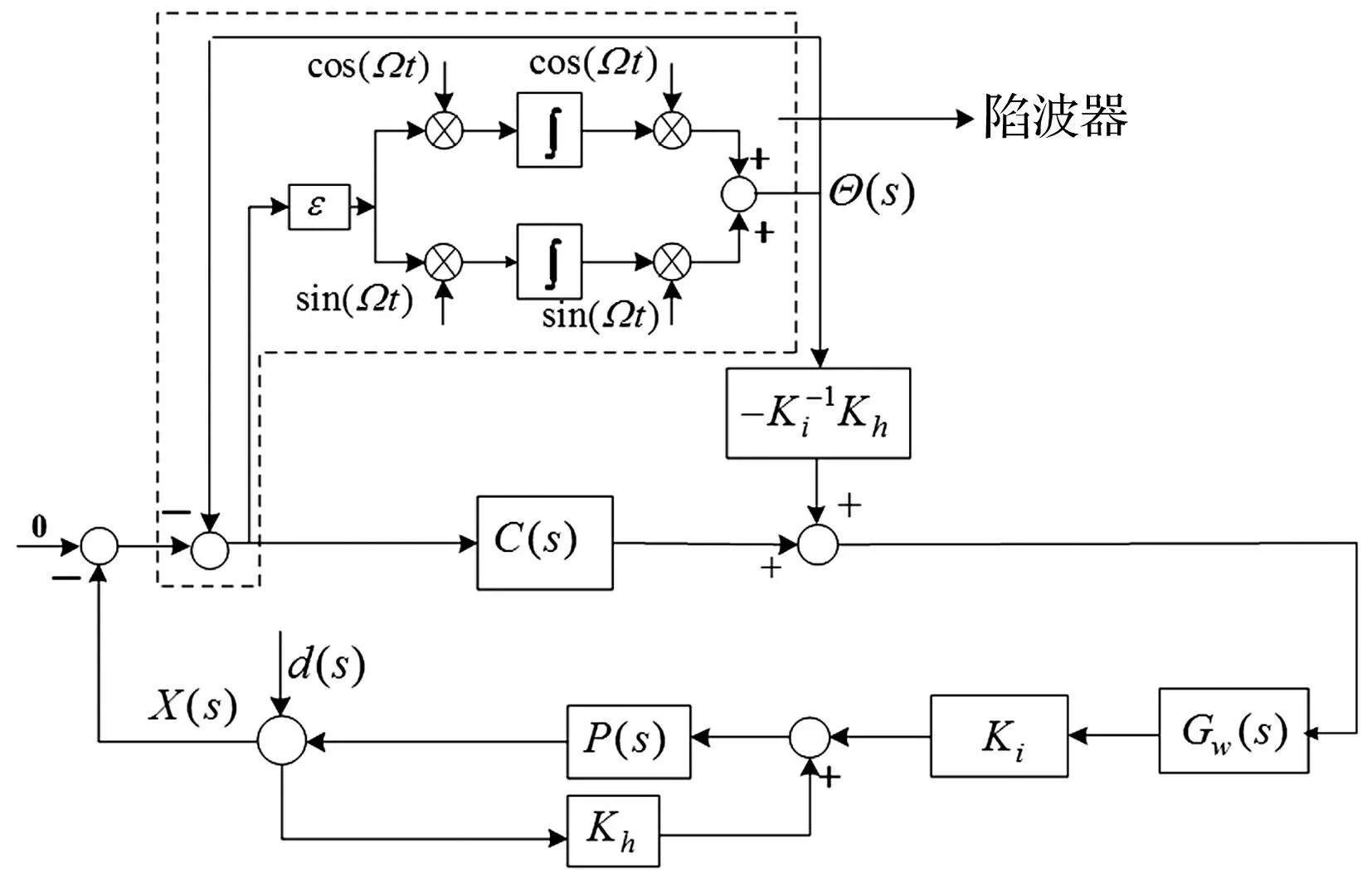
圖4 位移剛度力補償原理圖 Fig.4 The block diagram of displacement stiffness force compensation
2.1基于相移陷波器的磁軸承不平衡振動自適應控制原理
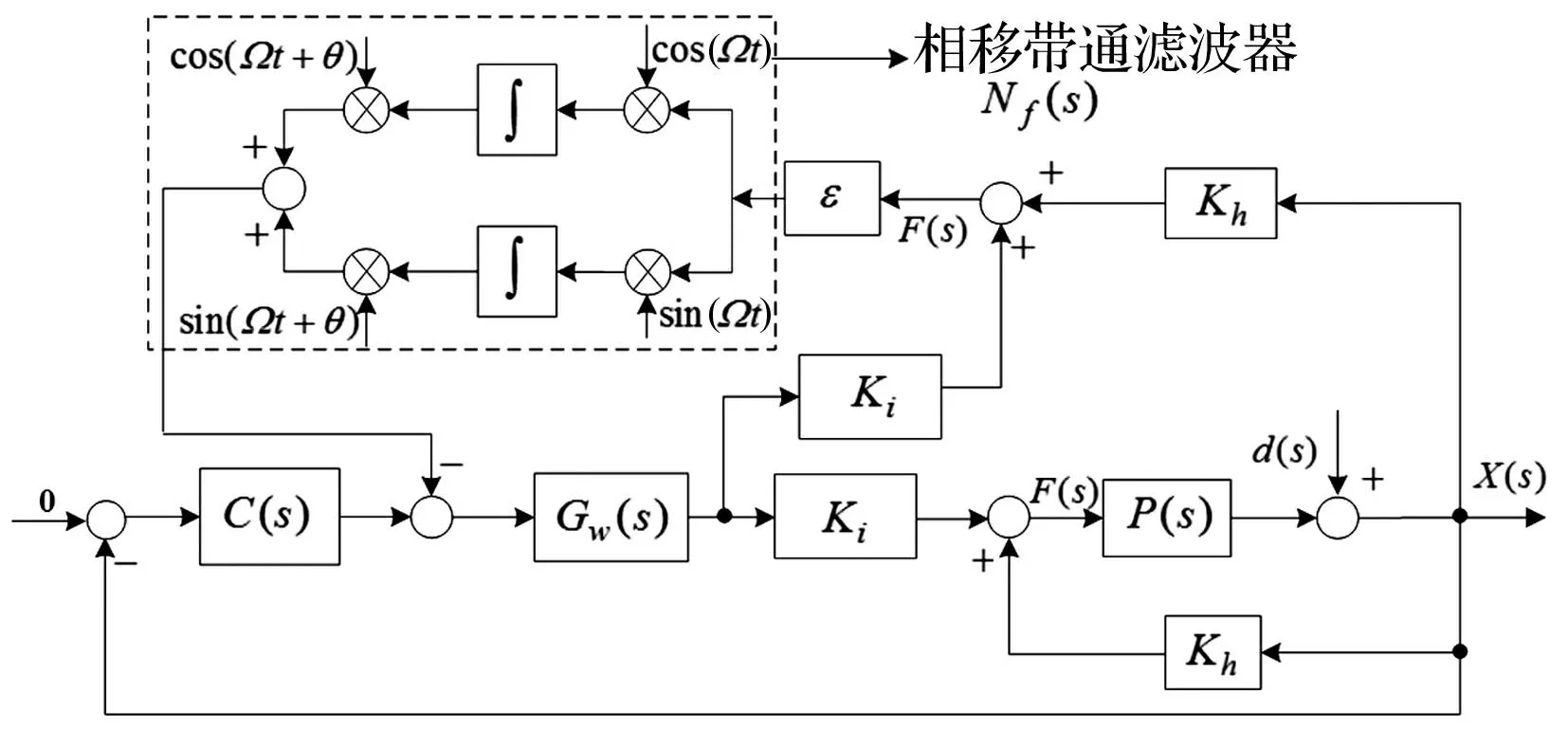
圖5 基于相移陷波器的 磁軸承不平衡振動抑制原理圖 Fig.5 The block diagram of suppressing unbalance vibration for magnetic bearing based on phase-shift notch filter
為有效解決功放低通特性及傳統陷波器的穩定性,提出基于相移陷波器的磁軸承不平衡振全頻自適應控制方法。據式(3),實現對同頻力的抑制需消除電流同頻剛度力Kii[ΘAX]及位移同頻剛度力KhΘAX。通常位移、電流剛度為已知量。本文直接以同頻軸承力為控制目標,將構造的軸承力F(s)輸入相移帶通濾波器Nf(s),輸出Kii[ΘAX]+KhΘAX反饋至原控制系統的電流環構成相移陷波器N(s),見圖 5,其等效原理見圖 6。其中,相移陷波器N(s)為在傳統陷波器基礎上引入相移角,其傳遞函數為
(5)
據式(5)得同頻量Kii[ΘAX]+KhΘAX經陷波器N(s)后獲得有效抑制,達到消除同頻振動力目的。由于陷波器N(s)中含功放,對功放低通特性進行自適應補償,故該過程無需考慮功放對同頻成分影響。以不平衡量d(s)為輸入、軸承力F(s)為輸出,傳遞函數為
(6)
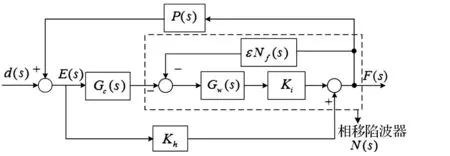
圖6 磁軸承不平衡振動抑制等效原理圖 Fig.6 The equivalent block diagram of suppressing unbalance vibration
2.2全頻穩定性分析
據式(6)得系統閉環特征方程為
1+KiGc(s)Gw(s)P(s)-KhP(s)+
εKiNf(s)Gw(s)=0
(7)
式(7)可轉化為
(8)
定義靈敏度函數為
(9)
在原系統穩定前提下,S(s)極點均位于左半平面。式(8)可簡化為
s2+Ω2+ε(scosθ-Ωsinθ)S(s)=0
(10)
由式(10)知,ε=0時存在s=±jΩ。將ε作為自變量、s為應變量,ε→0時對ε求導可得在s=±jΩ附近s隨ε的變化趨勢,即
(11)
滿足式(11)可保證閉環特征根在左半平面。其中,arg[·]為幅角。式(10)兩邊對ε求導得
(12)
由式(11)、(12)知,使系統穩定,須滿足
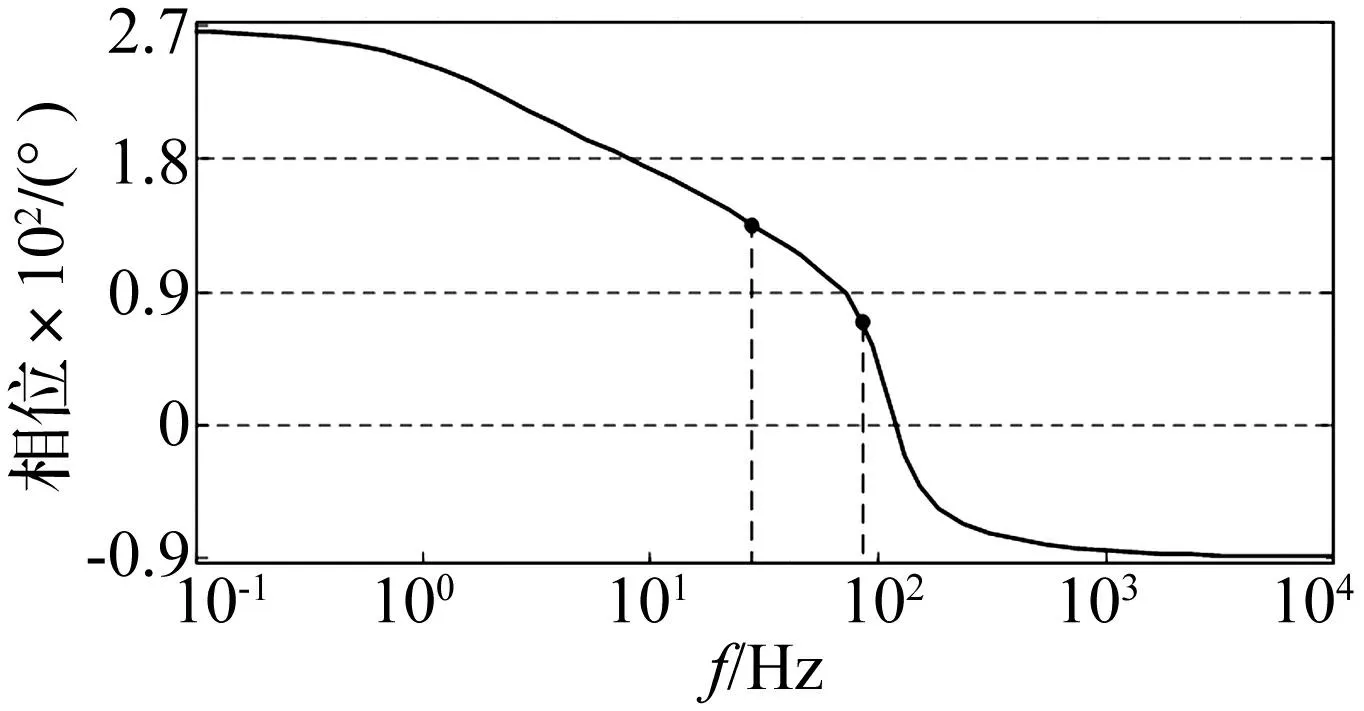
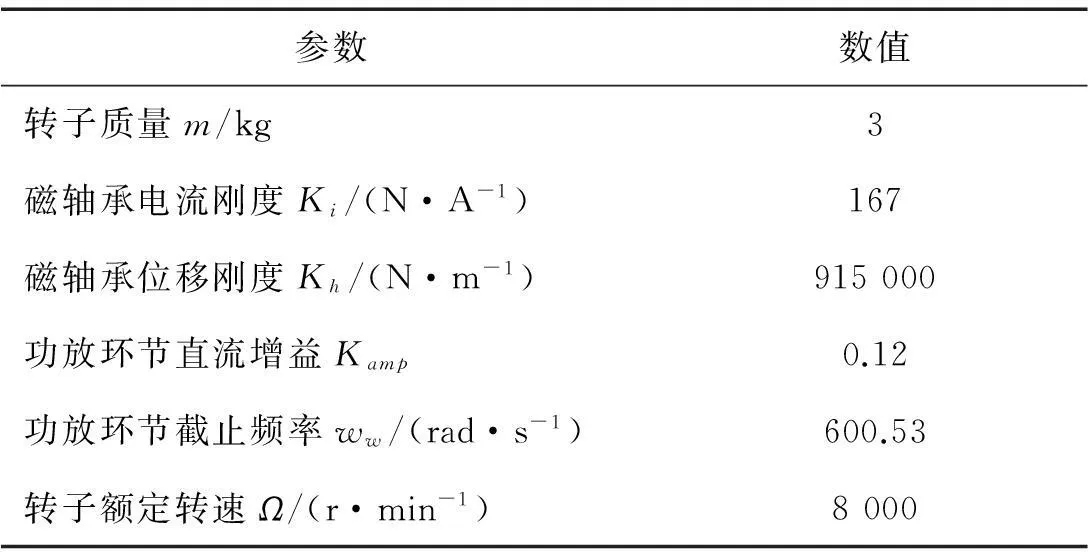
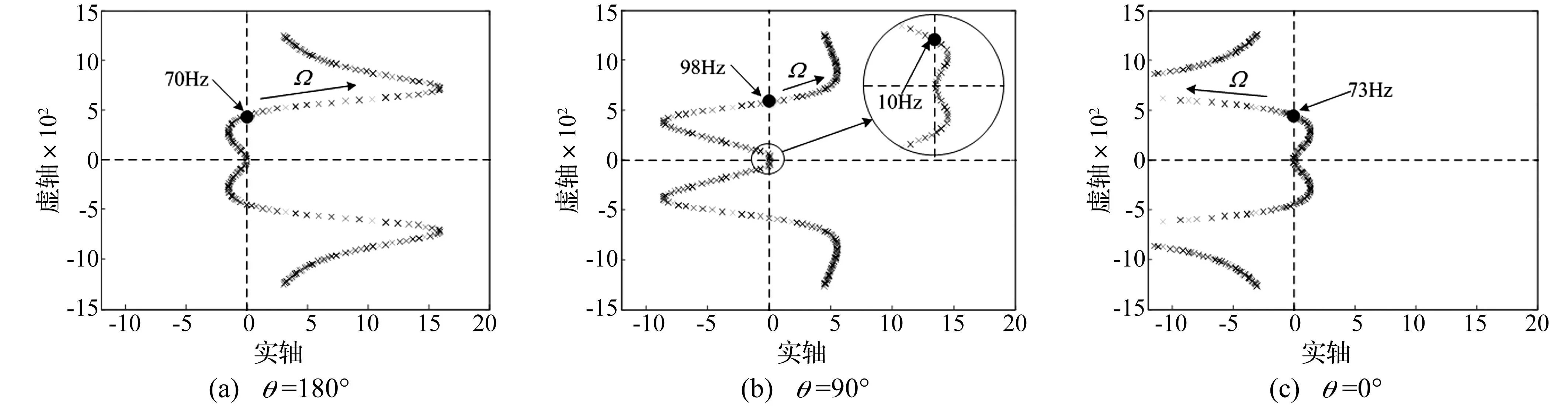
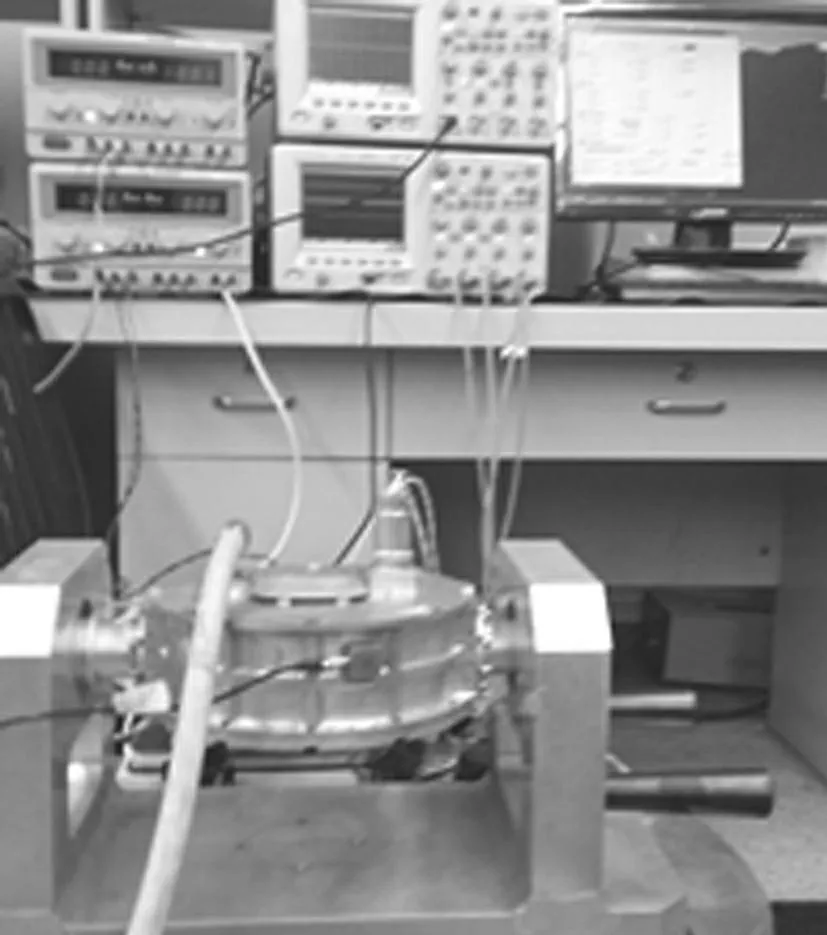
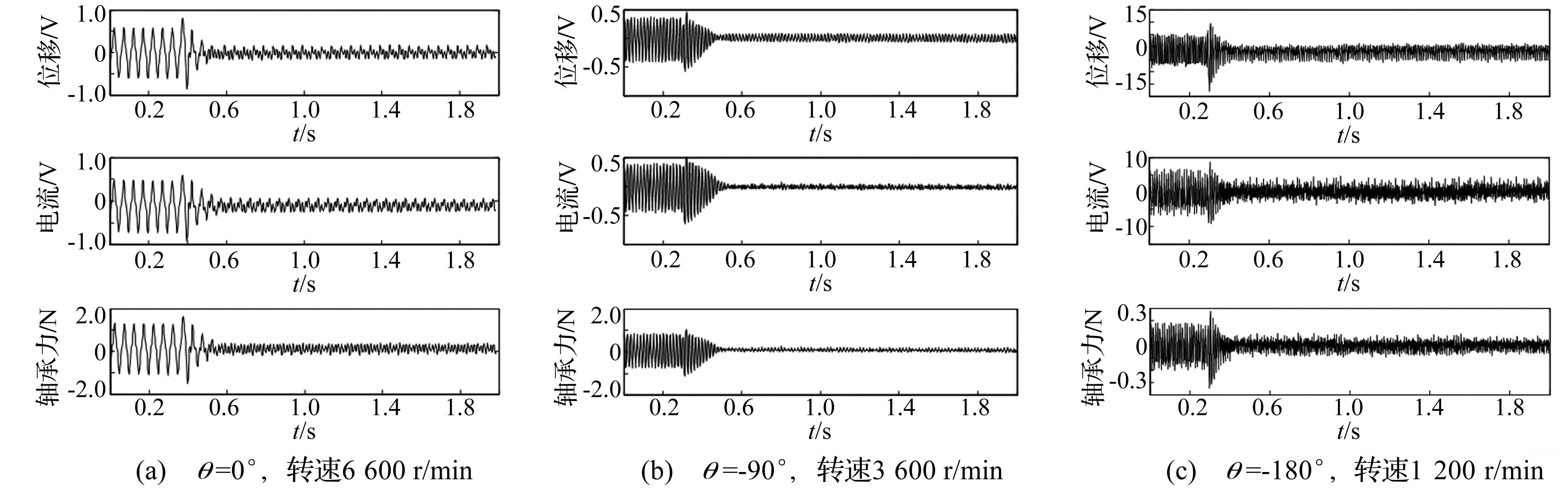
-90° (13) 對靈敏度函數S(s),理論上相位在整個有效頻率范圍內從270°變化到-90°,見圖 7,可見無法滿足全頻穩定要求。不同轉速下通過θ不同取值對靈敏度函數S(s)相位進行自適應補償,使其滿足式(13)。θ隨轉速自適應調節表達式為 (14) 當Ω1,Ω2滿足式(15)時,式(13)成立,系統在整個有效頻率范圍內是穩定的。 (15) 圖7 靈敏度函數相頻特性曲線圖 Fig.7 Phase-frequency diagram of the sensitivity function 設存在f1,f2,f3使arg[S(jf1)]=180°,arg[S(jf2)]=90°,arg[S(jf3)]=0°,實現整個轉速范圍內的系統穩定。由式(15)得 (16) 對磁懸浮剛性轉子,運行轉速遠小于一階模態,因此高頻特性的未建模動態不予考慮。實際模型St(s)與理論模型S(s)關系可表示為 St(s)=S(s)[1+Δ(s)] (17) (18) (19) 式中:k1=(lgf2-lgf1)/90;k2=(lgf3-lgf2)/90。 (20) 式(16)轉化為 (21) 由(21)知,Ω1,Ω2的取值范圍變小,為保證一定穩定裕度,取 (22) 系統仿真參數見表 1。據表1參數及對f1,f2,f3的定義,得f1=8.48 Hz,f2=70 Hz,f3=118 Hz。研究對象靈敏度函數不確定性可設為ρ=0.2,得Ω1=2138 r/min,Ω2=5432 r/min。據式(14)、(16),轉速為0~2138r/min時陷波器相移θ=-180°;轉速為2138~5432r/min時θ=-90°;轉速為5432~8000 r/min時θ=0°。ε=1,θ不同取值時關于Ω2的主導根軌跡見圖8。由圖8知,θ=-180°、轉速為0~2138 r/min時系統穩定;θ=-90°、轉速為2138~5432 r/min時穩定;θ=0°、轉速為5432~ 8000 r/min時穩定,滿足轉子整個轉速范圍的穩定。而ε不影響虛軸穿越點,即不影響臨界穩定轉速。 表1 仿真參數 圖8 閉環系統主導根軌跡圖 Fig.8 Dominant root locus of the closed-loop system 3實驗驗證 利用北京航空航天大學研制的磁懸浮控制力矩陀螺樣機進行實驗驗證,見圖 9。磁懸浮轉子系統用DSP+FPGA控制系統,系統采樣頻率為6.67 kHz。 為驗證本文方法實現全轉速范圍內不平衡振動控制的有效性,在三個轉速階段分別以1200 r/min、3600 r/min、6600 r/min進行實驗。位移及電流信號以電壓形式輸出,通過示波器采集,實驗結果見圖10。由于所用實驗裝置無軸承力傳感器,軸承力由采集的位移、電流按式(3)相加等效而成。圖10(a)軸承力幅值由1.2 N減少到0.25 N,減少79.2%;圖10(b)軸承力幅值由0.75 N減少到0.15 N,減少80%。由圖10(a)、(b)看出,軸承力并非完全收斂于零。因實際系統中傳感器檢測面不均勻及磁軸承非線性等使軸承力含倍頻成分。由圖10(c)看出,高速時軸承力幅值本身較小,加入相移陷波器后有一定衰減,但衰減不明顯,因此時同頻軸承力已非幅值最大振動力。實驗結果證明該方法能在整個轉速范圍內有效減少同頻軸承力,其有效性獲得驗證。 圖9 磁懸浮控制力矩陀螺樣機 Fig.9 The experimental setup of magnetically suspended control moment gyro (a) θ=-180°,轉速1200r/min(b) θ=-90°,轉速3600r/min(c) θ=0°,轉速6600r/min圖10 轉子位移、電流及軸承力響應圖Fig.10Transientresponseofdisplacement,currentandmagneticbearingforce 4結論 (1)引入相移帶通濾波器構成相移陷波器,據轉速自適應補償靈敏度函數相位,實現整個轉速范圍內消除振動力。且通過設置三個不同相移值能保證一定的穩定裕度。 (2)與在零同頻電流基礎上加同頻位移剛度力補償方法相比,本文方法自適應補償功放的低通特性,無需考慮功放對補償效果影響,可簡化設計過程。 (3)利用該方法能消除同頻軸承力,但高速情況下效果不明顯。對其它頻率成分振動力的有效抑制尚待研究。 參考文獻 [1]鄭世強,房建成,魏彤,等. MSCMG磁軸承μ綜合控制方法與實驗研究[J]. 儀器儀表學報,2010, 31(6): 1375-1380. ZHENG Shi-qiang, FANG Jian-cheng, WEI Tong, et al. Experimental study on μ synthesis control for magnetic bearings of MSCM G[J]. Chinese Journal of Scientific Instrumen, 2010, 31(6): 1375-1380. [2]Abdelfatah M M, Ilene B V. Imbalance compensation and automation balancing in magnetic bearing systems using the Q-parameterization theory[J]. IEEE Transactions on Control Systems Technology, 1995, 3(2): 202-210. [3]Fang J C, Ren Y. Decoupling control of a magnetically suspended rotor system in control moment gyros based on an inverse system method[J]. IEEE/ASME Transactions on mechatronic, 2010, 17(6): 1133-1144. [4]馮銳,鄭世強,房建成. 高速磁懸浮電動機對拖實驗中轉子不平衡質量在線辨識與振動控制[J]. 機械工程學報, 2014, 50(3): 71-77. FENG Rui, ZHENG Shi-qiang, FANG Jian-cheng. Online identification and unbalanced vibration control of high-speed magnetically levitated motor for drag test[J]. Journal of Mechanical Engineering, 2014, 50(3): 71-77. [5]龍亞文,謝振宇,徐欣. 磁懸浮軸承H魯棒控制策略研究[J]. 振動與沖擊,2013,32(23):115-120. LONG Ya-wen, XIE Zhen-yu, XU Xin. H robust control strategy for an active magnetic bearing[J]. Journal of Vibration and Shock,2013,23(23):115-120. [6]Lum K W, Coppla V T, Bernstein D S. Adaptive autocentering control for an active magnetic bearing supporting a rotor with unkown mass imbalance[J]. IEEE Transactions on Control Systems Technology, 1996, 4(5): 587-597. [7]Shi J, Zmood R, Qin L J. The direct method for adaptive feed-forward vibration control of magnetic bearing systems[C]. Seventh International Conference on Control, Automation, Robotics and Vision, Singapore, 2002. [8]Bi C, Wu D Z, Jiang Q , et al. Automatic learning control for unbalance compensation in active magnetic bearings[J]. IEEE Transactions on Magnetics, 2005, 41(7): 2270-2280. [9]劉彬,房建成,劉剛,等. 磁懸浮飛輪不平衡振動控制方法與實驗研究[J]. 機械工程學報,2010, 46(12): 188-194. LIU Bin, FANG Jian-cheng, LIU Gang, et al. Unbalance vibration control and experiment research of magnetically suspended flywheels[J]. Journal of Mechanical Engineering, 2010, 46(12): 188-194. [10]魏彤,向岷. 磁懸浮高速轉子基于位移剛度力超前前饋補償的高精度自動平衡方法[J]. 機械工程學報,2012,48(16):184-191. WEI Tong, XIANG Min.Autobalancing for magnetically suspended high-speed rotors based on lead feedforward compensation for displacement stiffness force[J]. Journal of Mechanical Engineering, 2012, 48(16): 184-191. [11]Fang J C, Xu X B, Tang J Q, et al. Adaptive complete suppression of imbalance vibration in AMB systems using gain phase modifier[J]. Journal of Sound and Vibration, 2013, 332(24): 6203-6215.