低分辨雷達(dá)的目標(biāo)分類識別研究?
2016-01-15 09:03:04宋新景
雷達(dá)科學(xué)與技術(shù) 2016年3期
宋新景
(1.中國電子科技集團(tuán)公司第三十八研究所,安徽合肥230088;2.孔徑陣列與空間探測安徽省重點(diǎn)實驗室,安徽合肥230088;3.智能情報處理重點(diǎn)實驗室,安徽合肥230088)
0 引言
分類識別技術(shù)是雷達(dá)當(dāng)今和未來發(fā)展的重要需求,同時也是四代雷達(dá)關(guān)鍵技術(shù)之一。直升機(jī)、螺旋槳和噴氣式飛機(jī)在現(xiàn)代戰(zhàn)爭中各自承擔(dān)著重要的作戰(zhàn)任務(wù),因此,研究對這三類飛機(jī)目標(biāo)的分類,對防空預(yù)警具有重要的意義。
本文從模式識別角度給出雷達(dá)目標(biāo)識別流程框圖,以及目標(biāo)識別對雷達(dá)設(shè)計需求。詳細(xì)介紹雜波抑制的處理方法,利用幅度調(diào)制特征和頻域熵特征實現(xiàn)噴氣式飛機(jī)、螺旋槳飛機(jī)和直升機(jī)目標(biāo)分類的方法。
1 目標(biāo)分類識別過程
從模式識別角度理解雷達(dá)目標(biāo)分類識別問題,分為訓(xùn)練過程和測試過程。訓(xùn)練過程:對接收到的回波復(fù)包絡(luò)信息進(jìn)行預(yù)處理,有效抑制地物雜波對目標(biāo)的檢測;進(jìn)而提取時域或頻域的特征,得到特征向量,然后訓(xùn)練分類器模型。測試過程:執(zhí)行同樣的操作,利用訓(xùn)練好的分類模型進(jìn)行預(yù)測分類結(jié)果。圖1給出了雷達(dá)目標(biāo)分類識別的流程框圖。下文就每個模塊展開論述。

圖1 目標(biāo)分類識別的流程圖
2 雷達(dá)設(shè)計需求
2.1 所需的最小脈沖重復(fù)頻率
脈沖重復(fù)頻率(PRF)決定了采樣速率,所需的最小取樣速率必須滿足奈奎斯特速率以避免頻率混疊。對于實際的直升機(jī),它們的葉尖速度范圍為200~230 m/s。對于米波波段,230 m/s的葉尖速度可以產(chǎn)生{fd}max=460 Hz的多普勒頻移。因此,對于一個懸停的直升機(jī),所需的最小采樣速率為2×{fd}max=920 Hz。如果直升機(jī)有徑向速度100 m/s的平移運(yùn)動,則直升機(jī)的最大多普勒頻移為660 Hz,所需的最小采樣速率為1 320 Hz[1]。
在雷達(dá)設(shè)計時,須滿足

式中,V1為葉尖速度,V2為平動徑向速度。
2.2 所需的最小積累脈沖數(shù)
常規(guī)雷達(dá)頻率分辨率為

式中,N為駐留脈沖數(shù)。
區(qū)分兩類不同的飛機(jī)目標(biāo):


工程實踐中,考慮一定的余量,可得

3 雜波抑制
地雜波形成的目標(biāo)檢測盲區(qū)會導(dǎo)致雜波被當(dāng)作目標(biāo)來檢測,形成大量的虛假目標(biāo)。對這一問題,在特征提取前先進(jìn)行雜波抑制,避免將地雜波統(tǒng)計。在距離多普勒(Range Doppler,RD)譜上獲取地雜波抑制的頻率范圍;應(yīng)用Clean算法,先對通道時域數(shù)據(jù)進(jìn)行地雜波抑制,然后進(jìn)行各項特征提取。
3.1 Clean算法
Clean算法[2]是一種基于FFT的快速譜估計算法。該算法的要求是:組成信號時域序列的各分量信號的持續(xù)時間長度都與進(jìn)行傅里葉變換處理的長度相同。這一點(diǎn)雜波信號模型無疑是能夠滿足的。針對復(fù)正弦信號分量組成的雜波模型,提取雜波信號能量的計算方法[3]為:
對信號的時域序列S(n)作FFT,得到S(ω),求取S(ω)落在雜波頻率范圍內(nèi)的最大極大值點(diǎn),該極值點(diǎn)所對應(yīng)的幅度、相位和頻率分別為第1個分量信號的參數(shù)估計,即

第1個被提取的雜波分量可以寫為

將該分量從原時域序列中減去,提取該分量信號能量,即

對剩余信號Sr(n)重復(fù)上述過程,直到滿足收斂條件。進(jìn)行雜波抑制的目的是使雜波區(qū)域內(nèi)的能量不被當(dāng)作目標(biāo)檢測出來,因而只要雜波區(qū)域內(nèi)的最大極大值點(diǎn)的功率小于平均噪聲功率,即可認(rèn)為雜波抑制完成。事先求取平均噪聲功率,通過計算雜波區(qū)域內(nèi)最大極值點(diǎn)的功率設(shè)定收斂條件。
3.2 雜波抑制處理結(jié)果
對于雜波頻率范圍內(nèi)的極大值點(diǎn),利用復(fù)正弦信號作為模型,利用Clean算法對模型參數(shù)進(jìn)行估計,之后在信號的時域序列中將該信號模型的估值減去,從而抑制掉頻帶內(nèi)所有極大值點(diǎn)對應(yīng)的頻率分量,即提取該分量的信號能量。剩余能量的信號即為雜波抑制后的時域序列。
給出Clean算法得到的雜波抑制結(jié)果,圖2~4給出了雜波抑制前后3類飛機(jī)的頻譜圖。從圖(b)上可以看出雜波能量明顯被抑制掉,甚至遠(yuǎn)低于背景噪聲功率,因而不會被當(dāng)作目標(biāo)檢測出來。
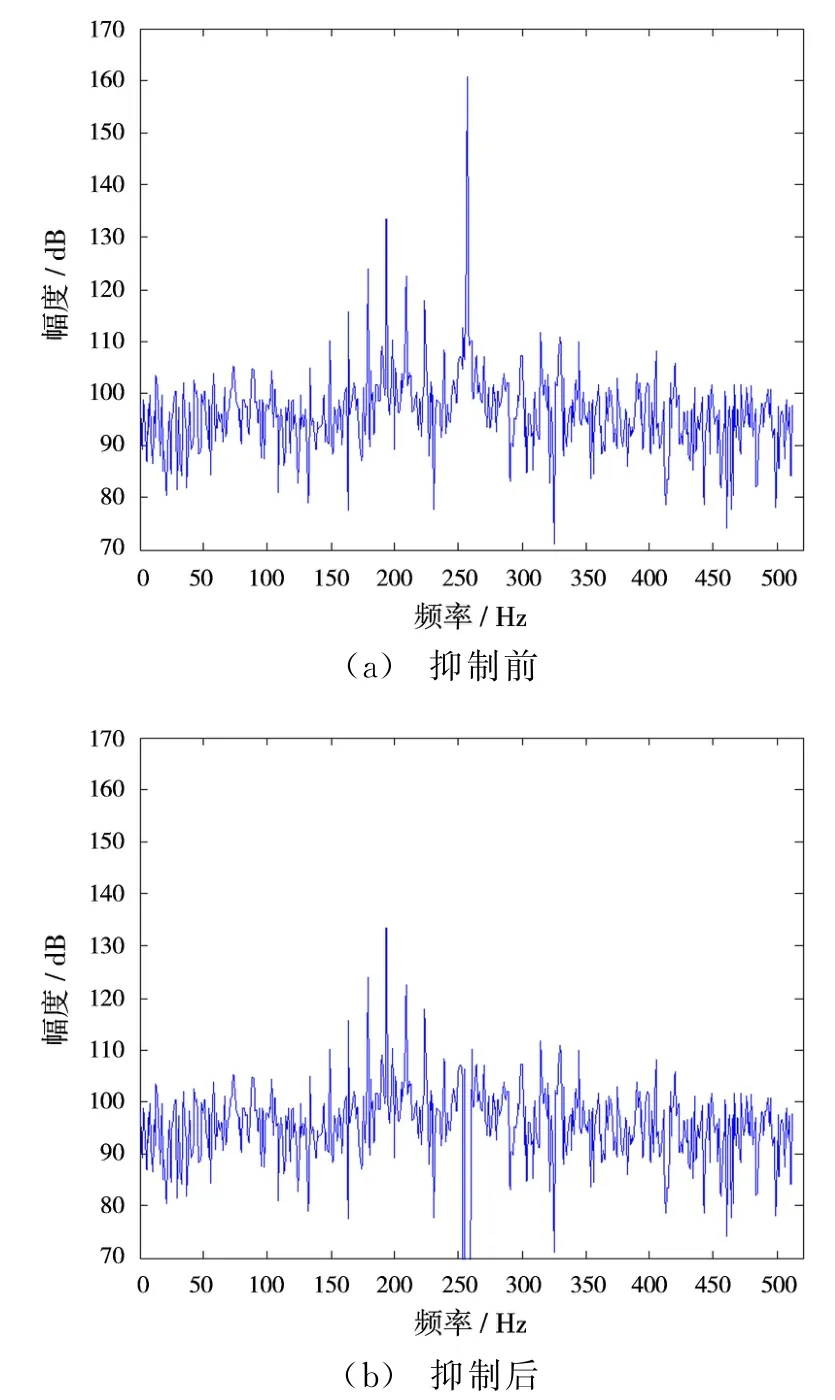
圖2 直升機(jī)雜波抑制前后頻譜圖

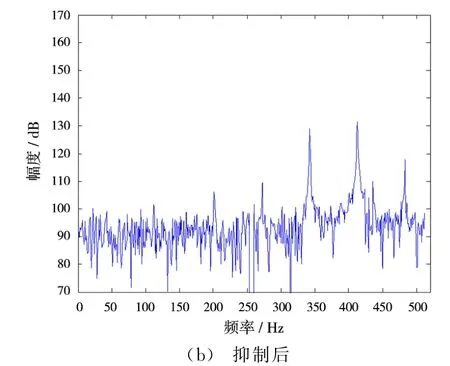
圖3 螺旋槳雜波抑制前后頻譜圖

圖4 噴氣式雜波抑制前后頻譜圖
4 特征提取與分析
4.1 幅度偏差系數(shù)
幅度偏差系數(shù)定義為

式中,ˉa為幅度均值,σa為方差。其值越大,表明回波幅度波動越大,旋轉(zhuǎn)部件在飛機(jī)目標(biāo)的機(jī)構(gòu)中是顯著的,反之表明回波以平穩(wěn)的機(jī)身分量為主。
4.2 頻域熵
頻域熵特征定義如下:

式中,p(n)為s(n)模一歸一化信號波形:

回波歸一化的目的是為了消除回波散射強(qiáng)度對特征的影響[4]。
頻域熵特征反映回波能量的集散程度,其值越大,說明回波能量分布越離散;其值越小,說明回波能量分布越集中。對于飛機(jī)目標(biāo),旋轉(zhuǎn)部件的調(diào)制作用越強(qiáng),調(diào)制頻譜能量分布越分散。3類飛機(jī)中,直升機(jī)旋翼調(diào)制作用最明顯,機(jī)身較小,調(diào)制分量引起的能量離散最大;噴氣式飛機(jī)目標(biāo)的旋轉(zhuǎn)部件最小,機(jī)身相對較大,調(diào)制分量引起的能量離散最小;螺旋槳飛機(jī)介于兩者之間。
4.3 多普勒域曲線積分
基于噴氣式飛機(jī)、螺旋槳飛機(jī)、直升機(jī)的多普勒域圖形的差異,采用多普勒域曲線積分可以獲得曲線與坐標(biāo)軸的面積,該值大致反映目標(biāo)反射回波的總能量的大小,其定義如下:

式中,d I為多普勒域曲線積分值,xi為多普勒域幅度值。
在相似的回波采集情況下,由于飛機(jī)外形的差異性,噴氣式飛機(jī)的多普勒積分值應(yīng)為最大,螺旋槳次之,直升機(jī)最小。
4.4 特征提取結(jié)果
訓(xùn)練集樣本特征分布如圖5所示。
5 分類器訓(xùn)練
特征提取后進(jìn)行分類識別,本文采用SVM分類器。SVM分類器的優(yōu)點(diǎn)是泛化能力較強(qiáng),收斂速度較快,且對小樣本訓(xùn)練效果也較好[5]。核函數(shù)采用高斯核函數(shù)。

圖5 訓(xùn)練集樣本特征分布圖
確定支持向量機(jī)最佳參數(shù)用以訓(xùn)練得到最優(yōu)分類器,使之對未知樣本同樣具有良好的分類效果。本文采用交叉驗證的方法訓(xùn)練分類參數(shù),可以有效地確定最優(yōu)參數(shù),分類準(zhǔn)確率有所提高。
5.1 交叉驗證
交叉驗證的思想是在給定的訓(xùn)練集中,用大部分樣本進(jìn)行建模,小部分樣本用剛建立的模型進(jìn)行預(yù)測,并求這個小部分樣本的預(yù)測誤差。重復(fù)這個過程,直到所有的樣本都被預(yù)測了一次而且僅被預(yù)測了一次。
常用的交叉驗證形式為K折交叉驗證。初始訓(xùn)練集分割成K個子樣本,一個單獨(dú)的子樣本作為驗證模型的數(shù)據(jù),其他K-1個樣本用來訓(xùn)練。交叉驗證重復(fù)K次,每個字樣本驗證一次,平均K次的結(jié)果,最終得到單一的估測。
5.2 參數(shù)選擇
SVM高斯核函數(shù)兩個重要的參數(shù)C和kerneloption,每個參數(shù)有對應(yīng)的選擇范圍。這里選擇訓(xùn)練集樣本直升機(jī)、螺旋槳、噴氣式,采用5折交叉驗證。
經(jīng)過多次遍歷,選出最優(yōu)參數(shù),用所有樣本得到分類模型,并用訓(xùn)練集進(jìn)行驗證,訓(xùn)練集準(zhǔn)確率為96.73%。
6 分類結(jié)果分析
本文采用的是對直升機(jī)、螺旋槳和噴氣式三類飛機(jī)的實測數(shù)據(jù)。實驗中,數(shù)據(jù)集進(jìn)行歸一化后,構(gòu)成訓(xùn)練和測試樣本集,支持向量機(jī)部分采用高斯核函數(shù),其參數(shù)C和kerneloption由交叉驗證決定,選取最佳目標(biāo)識別率對應(yīng)的參數(shù)。預(yù)測結(jié)果如表1所示。

表1 3類飛機(jī)分類結(jié)果
從表1可以看出,螺旋槳和直升機(jī)的分類效果較差。訓(xùn)練集中直升機(jī)、螺旋槳只有一個姿態(tài)下的數(shù)據(jù),測試集和訓(xùn)練集姿態(tài)不同,樣本差別較大,同時樣本數(shù)量也較少,所以直升機(jī)和螺旋槳飛機(jī)識別效率低下。
7 結(jié)束語
本文從模式識別角度劃分雷達(dá)目標(biāo)識別問題,在特征提取前進(jìn)行預(yù)處理,抑制雜波影響,提取頻譜幅度的相關(guān)特征。分類器模型訓(xùn)練過程采用交叉驗證和參數(shù)選擇相結(jié)合,針對訓(xùn)練樣本獲得最優(yōu)分類面。窄帶信號由于分辨率較低,適用對目標(biāo)進(jìn)行較粗的分類。
[1]CHEN V C.雷達(dá)中的微多普勒效應(yīng)[M].吳順君,杜蘭,劉宏偉,譯.北京:電子工業(yè)出版社,2013:92-109.
[2]鄒虹.多分量線性調(diào)頻信號的時頻分析[D].西安:西安電子科技大學(xué),2000.
[3]仇永斌,張寧,張樹春.雙基地高頻地波雷達(dá)海雜波抑制[J].哈爾濱工業(yè)大學(xué)學(xué)報,2012,44(1):71-77.
CHOU Yongbin,ZHANG Ning,ZHANG Shuchun.Ocean Clutter Suppression for a Bistatic HF Ground Wave Radar[J].Journal of Harbin Institute of Technology,2012,44(1):71-77.(in Chinese)
[4]陳鳳.基于HRRP和JEM信號的雷達(dá)目標(biāo)識別技術(shù)研究[D].2009:123.
[5]易曉柯.支持向量機(jī)的全局局部特征融合目標(biāo)識別[J].雷達(dá)科學(xué)與技術(shù),2011,9(2):180-187.
YI Xiaoke.Target Recognition Based on Support Vector Machine(SVM)Features Fusion[J].Radar Science and Technology,2011,9(2):180-187.(in Chinese)
猜你喜歡
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
