基于時間相關性的海面小目標檢測技術?
2016-01-15 09:02:58趙中興陳永森
雷達科學與技術 2016年3期
關鍵詞:檢測
司 軍,趙中興,吳 儉,2,洪 偉,陳永森
(1.中國船舶重工集團第七二三研究所,江蘇揚州225001;2.海博威(江蘇)科技發展有限公司,江蘇揚州225001)
0 引言
在海用雷達應用環境中,暗礁、木質漁船等弱小目標隱匿在海雜波中難以探測,時常發生意外的撞擊事故,給人民生命財產帶來損失。因此,如何探測海面小目標已經成為海用雷達應用領域的研究熱點[1-4]。
海面小目標探測的關鍵是抑制海雜波的同時保留目標信息。目前而言,國內外海用雷達技術日趨成熟,雷達頻段一般覆蓋范圍為UHF波段~X波段,作用距離不等,但缺點集中體現在目標提取技術落后,即在信號處理中廣泛采用脈沖間非相參積累技術,在目標回波強度弱于海雜波的條件下,探測性能不佳甚至失效,難以完成對小目標的監視。
針對這一問題,通常的改進方法集中在發射前端上,譬如提高發射信號帶寬、增大天線孔徑等,改進后在一定程度上提升了回波信雜比,但硬件成本太高,且目標探測效果提升有限。此外,學者們也在通過改進信號和數據處理技術來改善海面小目標探測效果,比如海雜波重構、知識輔助、檢測前跟蹤(Trace Before Detect,TBD)等[5-8],但上述技術目前仍停留在算法研究階段,在實測環境下性能不佳,距離工程化應用還需要一定的時間。
本文提出了一種基于時間相關性的海面小目標檢測技術,該技術利用了海雜波與目標在時間相關性上的差異,通過成組非相參積累級聯雜波圖迭代處理來抑制海雜波、增強小目標,并經自適應門限檢測后完成目標提取。
1 海雜波的時間相關性
時間相關性是指同一個雷達距離單元上回波信號在時間測量上表現出的相似性,可通過分析目標和海雜波強度的自相關函數獲得其相關系數和對應的相關時間,以獲取目標和海雜波的時間相關性。
由于目標的回波強度主要受雷達發射功率、工作頻率、極化方式、自身姿態等因素的影響,在雷達工作方式不變的條件下,海面小目標往往表現出較強的時間相關性,這是不可置否的。然而,海況和氣象條件瞬息變化,海雜波的時間相關性較弱。
事實上,海面的后向散射特性與海情、風向、雷達頻率、極化方式和入射角等因素息息相關。根據相關文獻資料顯示,起伏的海雜波信號由快起伏、慢起伏兩個部分組成,快起伏部分由風的漣波形成,相關時間為4~8 ms;而慢起伏部分與海浪的結構相關,相關時間較長,為1~2 s。為了進行海雜波的時間相關特性驗證,利用導航雷達平臺在東海、黃海等多個海域進行長時間的X波段海雜波數據錄取,錄取條件如下:
(1)雷達距海平面高度:7.5 m
(2)溫度:-5°~24°
(3)風速:0~12 m/s
(4)濕度:50%~85%
(5)海情:1~4級
該錄取平臺的信號帶寬為5 Hz,海雜波相關系數的數學表達式為

式中,cov(x(T),x(T+t))表示同一距離單元中不同時刻海雜波幅度的協方差,Dx(T),Dx(T+t)表示海雜波幅度的方差。錄取的海雜波數據分析顯示:假定ρ=0.2為相關條件,海雜波幅度的相關時間約為8 ms。
從圖1可以看出,I路、Q路相關系數差別不大,在主瓣區域,海雜波幅度的相關系數要略小于I/Q路的相關系數,在ρ≥0.2的范圍內,相關系數隨時間呈指數下降,當ρ<0.2時,相關系數進入較長的衰減過程,但是波動范圍較大,這時海雜波的時間相關性較弱。
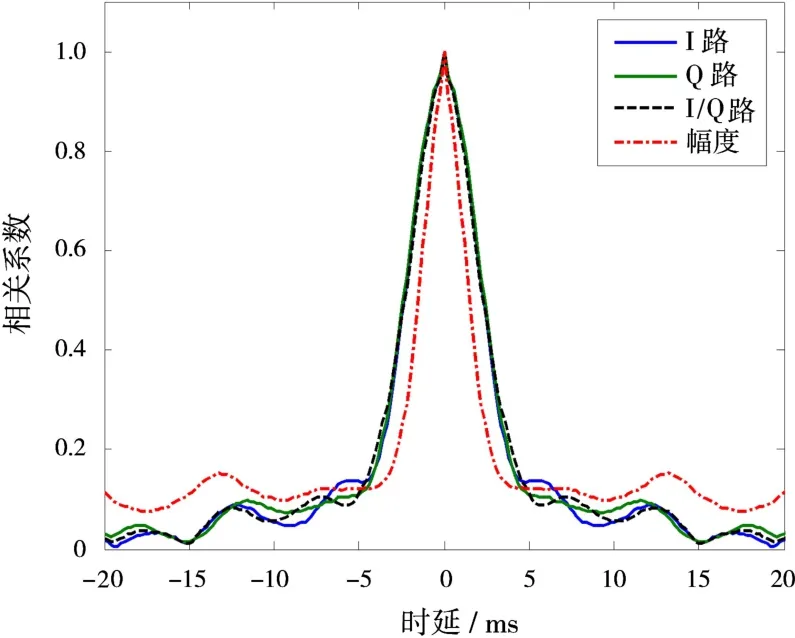
圖1 X波段海雜波相關時間
2 基于時間相關性的目標檢測技術
根據第1節的分析結果,海雜波相關時間約為8 ms,故傳統的脈沖間非相參積累處理無法有效抑制海雜波。倘若進行數據率在125 s以下的幀間積累方可實現海雜波抑制,能夠有效提升回波信雜比,而普通海用雷達的最高轉速為120 r/min,滿足數據率的要求。鑒于以上因素,本節提出了基于時間相關性的海面小目標檢測技術。
基于時間相關性的目標檢測技術在信號處理階段實現,包括成組非相參積累級聯雜波圖迭代和自適應門限檢測兩個部分,下面逐一進行闡述。
2.1 成組非相參積累級聯雜波圖迭代技術
成組非相參積累級聯雜波圖迭代技術首先在脈沖間進行成組非相參積累,然后通過雜波圖迭代完成幀間積累,增強時間相關性強的目標回波,抑制時間相關性弱的海雜波,大大提升了回波信雜比,有利于海面小目標檢測。
(1)成組非相參積累
成組非相參積累的實現方式是每個距離 方位單元內若干個脈沖的原始回波數據為一組進行非相參積累運算,作為該距離-方位單元內的脈沖積累數據。假定搜索空域劃分為n個距離單元、m個方位單元,則成組非相參積累的數學表達式為

式中,Dn,m為距離-方位單元(n,m)內的脈沖積累數據,該距離-方位單元占有I個距離分辨單元和J個脈沖,xn+i,m+j為該距離-方位單元內第j個脈沖、第i個距離分辨單元上的原始回波幅值。
從式(2)不難看出,成組非相參積累首先進行距離分辨單元的回波幅值選大處理,以減小距離誤差的影響,再進行若干個脈沖為一組的非相參積累運算。
(2)雜波圖迭代
接下來,將距離-方位單元作為雜波圖單元,對每個雜波圖單元內的脈沖積累數據Dn,m進行雜波圖迭代處理。雜波圖迭代技術是美國學者Nitzberg在1986年提出的[9]。這種技術將雷達掃描空間分成有限個雜波圖單元,根據多次掃描測量值獲得雜波背景的強度估計,并根據新的和以前若干次掃描測量值的迭代來實現雜波圖更新,作為當前雜波背景的強度估計,原理框圖如圖2所示。
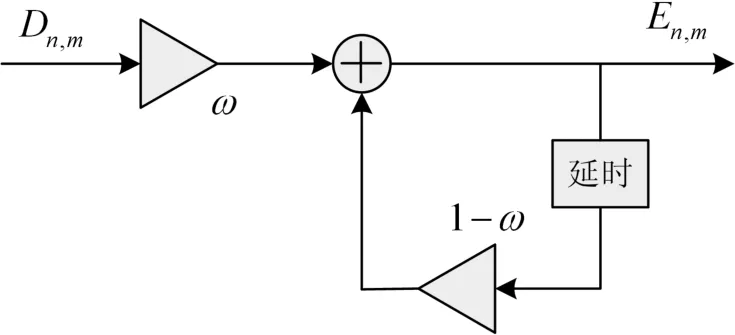
圖2 雜波圖迭代技術原理框圖
從圖2可以看到,雜波圖迭代采用一階遞歸濾波器來實現,Dn,m為成組非相參積累處理后的脈沖積累數據,En,m為雜波圖迭代處理后的幀間積累數據,其中加權系數ω的取值范圍為0<ω<1。雜波圖迭代的數學表達式如下:

將式(3)進行展開,得

式中,En,m(l)為雜波圖單元(n,m)內第l次掃描得到的迭代處理結果,ω為加權系數,Dn,m(l)為該雜波圖單元內第l次掃描的脈沖積累數據,是時變的。
事實上,在雜波圖迭代處理的過程中,每個掃描周期內需要每個雜波圖單元從乒乓緩沖存儲器中讀取以前若干個掃描周期的脈沖積累數據,最后輸出雜波圖迭代處理后的幀間積累數據到普通緩沖存儲器中。
2.2 自適應門限檢測器
在對原始回波數據進行成組非相參積累級聯雜波圖迭代處理后,形成二維雜波圖數據平面。根據第1節所述,在真實海面環境下,海雜波幅度變化受氣象條件、海況、雷達參數等因素影響,且不同掃描周期的海雜波與目標均存在時間相關性,造成雜波圖數據平面中目標和海雜波起伏模型難以穩定描述,導致傳統的參量或非參量CFAR檢測器性能不佳,本小節提出一種適用于非均勻海雜波背景的自適應門限檢測器。
自適應門限檢測器采用非參量CFAR的思想,將被檢測雜波圖單元周圍雜波(或噪聲)的數據作為對雜波(或噪聲)統計特性的某種估計,用來設置檢測閾值。示意圖如圖3所示。

圖3 自適應門限檢測器示意圖
在圖3中以被檢測雜波圖單元A為中心,陰影部分的pq個雜波圖單元作為檢測窗,不參與背景雜波功率估計,目的是為了防止目標信號泄露到背景單元中影響雜波功率估計,包含P×Q個雜波圖單元的空間區域內其他雜波圖單元用來估計被檢測雜波圖單元A所在位置的背景雜波圖功率。那么,第l次掃描的檢測閾值DT(l)的數學表達式為

式中,C=PQ-pq,Ec為第l次掃描中被檢測雜波圖單元A周圍參與背景雜波功率估計的第c個雜波圖單元,K為修正系數。隨著不同掃描周期雜波圖數據平面的更新,閾值也在不斷更新。
3 數據仿真與實測試驗分析
本節首先通過仿真數據處理對成組非相參積累級聯雜波圖迭代算法進行驗證,然后進行真實海面環境下的實測試驗,以驗證本文提出的基于時間相關特性的目標檢測技術對海面小目標的探測性能。
3.1 數據仿真
根據意大利IPIX雷達設備參數進行數據仿真,原始海雜波數據的距離分辨率為15 m,距離單元28個,錄取時間60 s,目標在第25個距離單元,信雜比約2 d B,如圖4所示。

圖4 原始數據
在該算法處理過程中,成組非相參積累脈沖數目J為2,雜波圖迭代次數為16,即采用16個掃描周期的脈沖積累數據完成幀間積累,經非相參積累級聯雜波圖迭代算法處理后,目標回波顯著增強,但在其他距離單元上,依然存在一些尖峰,如圖5所示。

圖5 成組非相參積累級聯雜波圖迭代處理結果
然后,對圖5所示的數據平面進行雜波圖自適應門限檢測處理,得到如圖6所示的數據結果,第25個距離單元上的小目標被提取出來。
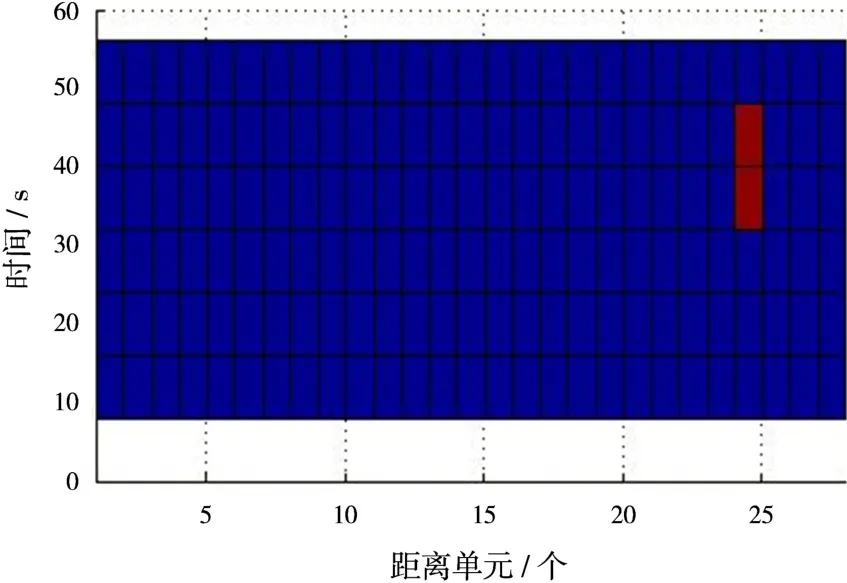
圖6 自適應門限檢測后的結果
3.2 真實海面環境試驗
本小節利用X波段導航雷達在黃海海域進行真實海面環境試驗,根據第2節所述的信號處理技術來完成小目標探測性能驗證,信號處理中的相關參數如表1所示。

表1 信號處理相關參數
試驗條件如下:風力5~6級,海情可按3級估算,設備架高約為10 m,一艘RCS約為20 m2的木制漁船拖曳一個RCS約為0.05 m2的標準發射體作為探測目標,朝向遠離雷達的方向自由航行。試驗場景如圖7所示。


圖7 試驗場景
常規的海雜波抑制技術是非相參積累,采用常規技術處理后,海雜波依然較多,漁船和小目標淹沒在海雜波中無法識別,如圖8所示的視頻,漁船和標準發射體目標在方框內,方框表示視頻錄取波門,僅波門內的點跡數據被檢測錄取。
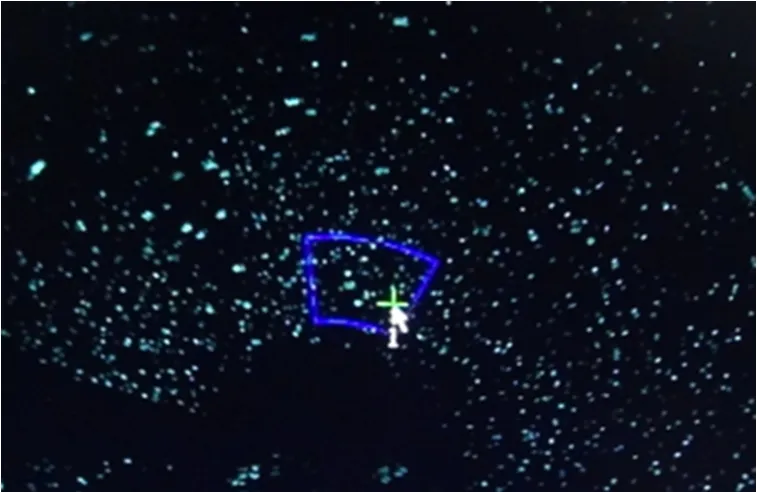
圖8 常規技術處理后的視頻
采用本文所采用的成組非相參積累級聯雜波圖迭代技術處理后,海雜波被完全抑制掉,雜波圖迭代次數為16,如圖9所示,方框中的強散射點即為漁船和標準反射體目標,方框外的其他散射點為漁網、航燈等固定目標。
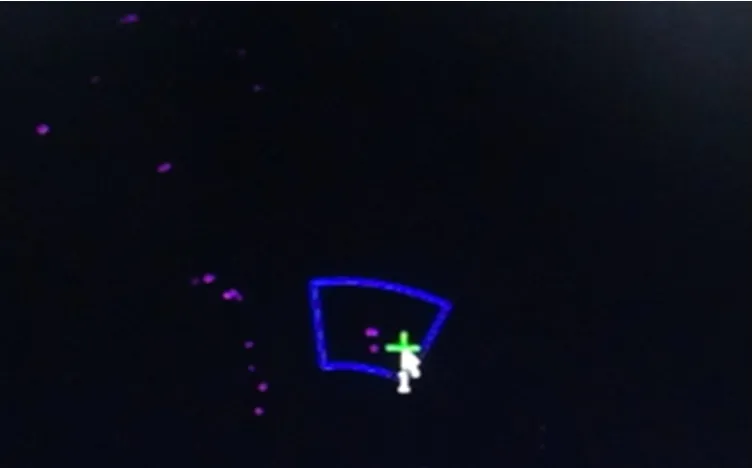
圖9 本文技術處理后的視頻
綜上所述,采用本文提出的技術進行對海探測,能夠改善傳統雷達信號處理方法的缺點,海雜波幾乎被完全抑制掉,隱匿其中的小目標能夠被正確提取。
4 結束語
本文針對海面環境下的小目標探測問題,分析了傳統海用雷達的缺陷與不足,提出了一種基于時間相關特性的海面小目標檢測技術,尤其是成組非相參積累級聯雜波圖迭代技術,僅通過改進后端的信號處理方法來實現海雜波抑制與目標信息提取。數據仿真與外場實測試驗結果均證實了該技術的可行性和有效性,能夠很好地完成海面小目標檢測。
[1]CANDAN C.Analysis and Further Improvement of Fine Resolution Frequency Estimation Method from Three DFT Sample[J].IEEE Signal Processing Letters,2013,20(9):913-916.
[2]洪偉,李紅虎.一種艦載毫米波雷達海雜波背景下的慢速小目標檢測算法研究[J].艦船電子對抗,2014,37(6):60-62,68.
HONG Wei,LI Honghu.Research into a Detection Algorithm of Shipborne Millimeter Wave Radar to Slow and Small Target in Sea Clutter Background[J].Shipboard Electronic Countermeasure,2014,37(6):60-62,68.(in Chinese)
[3]龐立偉,薛文虎,席澤敏,等.用于強海雜波中目標檢測的自適應波形設計算法[J].空軍預警學院學報,2013,27(3):177-180.
PANG Liwei,XUE Wenhu,XI Zemin,et al.Algorithm of Adaptive Waveform Design for Target Detection in Strong Sea Clutter[J].Journal of Air Force Early Warning Academy,2013,27(3):177-180.(in Chinese)
[4]曾浩,李潔,鑒福升.強海雜波環境下目標檢測方法對比分析[J].雷達科學與技術,2015,13(1):33-36.
ZENG Hao,LI Jie,JIAN Fusheng.Comparative Analysis of Target Detection Methods in Strong Sea Clutter Background[J].Radar Science and Technology,2015,13(1):33-36.(in Chinese)
[5]CAPRARO C T,CAPRARO G T,WICKS M C.Knowledge Aided Detection and Tracking[C]∥IEEE Radar Conference,Boston,MA:IEEE,2007:352-356.
[6]EHRMAN L M,BLAIR W D.Using Target RCS when Tracking Multiple Rayleigh Targets[J].IEEE Trans on Aerospace and Electronic Systems,2010,46(2):701-716.
[7]CHEN Zhenxing,KONG Lingjiang.Maneuvering Target Tracking in Weibull Clutter with Amplitude Information[C]∥IET Radar Conference,Glasgow UK:IET,2012:1-5.
[8]蘇洲陽,程婷,何子述.一種三維彈道目標跟蹤的粒子濾波方法[J].雷達科學與技術,2015,13(1):44-50.
SU Zhouyang,CHENG Ting,HE Zishu.A Particle Filter for 3D Ballistic Target Tracking[J].Radar Science and Technology,2015,13(1):44-50.(in Chinese)
[9]NITZBERG R.Clutter Map CFAR Analysis[J].IEEE Trans on Aerospace and Electronic Systems,1986,22(4):419-421.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
