三維激光掃描點云混合像素的自動識別方法
2016-01-12 08:32:53林歡,王成碩,王娟
測繪工程 2015年10期
三維激光掃描點云混合像素的自動識別方法
林歡1,王成碩2,王娟3
(1.河海大學 地球科學與工程學院,江蘇 南京 210098;2.恒大地產集團沈陽公司,遼寧 鞍山 114000;3.江蘇興安電力實業有限公司,江蘇 南京 210000)
摘要:混合像素的存在會給點云后續處理與應用帶來干擾,針對如何在原始掃描點云中自動識別混合像素的問題,從掃描儀的工作原理著手分析了混合像素的形成條件,結合掃描儀的內部光電轉換機制與真實掃描數據論證混合像素的測距誤差分布規律,據此設計混合像素的自動探測方法。利用真實原始掃描數據進行實驗,結果證明,文中方法能夠準確地識別出點云中的混合像素。
關鍵詞:三維激光掃描;三角構網;深度差;混合像素;點云密度
中圖分類號:TP391.41
收稿日期:2014-08-18
基金項目:國家自然科學基金資助項目(41201439)
作者簡介:林歡(1990-),男,碩士研究生.
Anautomaticmethodofrecognizingmixedpixelsin3Dlaserscanningpointcloud
LINHuan1,WANG Cheng-shuo2,WANG Juan3
(1.SchoolofEarthScienceandEngineering,HohaiUniversity,Nanjing210098,China;2.EvergrandRealEstateGroupLtd.,Anshan114000,China;3.JiangsuXinganElectricPowerIndustrialCo.,Ltd.,Nanjing210098,China)
Abstract:The existence of mixed pixels will bring interference to the following processing and application of the point cloud.Aiming at the problem of recognizing mixed pixels automatically in the original scanning point cloud,it analyzes the formation conditions of the mixed pixels, by verifying the mixed pixel’s ranging error distribution based on the scanner's internal photoelectric conversion mechanism and the real scanning data.Furthermore,an automatic method is designed on the basis of former analysis.The experiment results show the mixed pixels can be recognized accurately.
Keywords:3Dlaserscanning;triangulation;depthdifference;mixedpixel;pointclouddensity

三維激光掃描技術作為一種新的測量和感知技術,因其獲取數據的速度快、得到的點云模型精度高,正被越來越廣泛應用。利用三維激光掃描,不僅能獲得高精度的三維點云模型,而且能根據不同需求在點云模型上提取想要的信息[1]。由于三維激光掃描儀是根據激光在掃描儀與目標表面之間的飛行時間來推算沿激光光束方向上目標表面到掃描儀之間的距離,所以當激光光斑正好落物體邊緣上時,同一束激光會在不同景深的物體表面形成兩束反射激光,從而造成三維激光掃描儀的測距錯誤,形成混合像素。混合像素的存在會對后期點云處理(三維重構、物體表面分割等)工作帶來較大影響,因此設計一個能自動識別并濾除混合像素的算法是有必要的。
混合像素不僅普遍存在于激光掃描點云中,而且普遍存在于遙感圖像中。遙感圖像領域一般對圖像中的混合像素進行分解處理,例如游曉斌提出了一種通過重采樣對圖像中混合像元的分解方法[2]。崔雨勇提出基于圖像邊界的混合像素分解方法,首先對圖像進行邊緣提取,對非邊界圖像進行分類,再對邊界進行混合像元分解[3]。另外,在激光掃描點云方面對于混合像素的研究中,混合像素一般被視為噪聲而濾除。例如張洪棟等人利用相鄰點之間的距離關系,設計出了一種規則混合像素的提取方法,并對提取出的混合像素進行校正,保證了數據的完整性[4]。本文在上述方法基礎上研究并提出了一套混合像素的自動識別算法:在混合像素的測距異常的基礎上利用深度差統計初步識別混合像素,并利用密度統計的方法進一步確定混合像素,最后通過實驗驗證了算法的有效性。
1混合像素的產生機理及特性
1.1 產生機理
激光掃描發射的光束成錐形形狀發散,當它投射到物體表面時會產生光斑,并且掃描距離越遠,激光斑點越大。當激光光束遇到物體邊緣時,部分光束會投射到前景物體邊緣,另外一部分光束會投射到背景物體上,這時就會產生混合像素[5],如圖1 所示。測量的實際距離會位于前景物體邊緣與背景物體之間,所以前、背景之間會多出一個孤立點(即混合像素),產生這種現象的原因在于三維激光掃描儀內部的傳感器在接收信號能量時一部分會用來校正距離信息,雖然這種校正方法可以提高部分數據的精度,但促使了混合像素的產生。
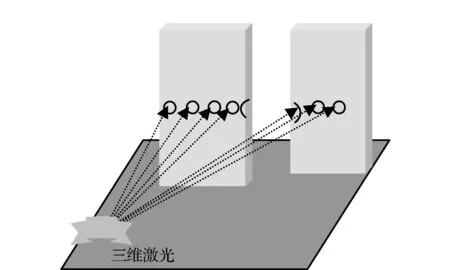
圖1 混合像素產生示意圖
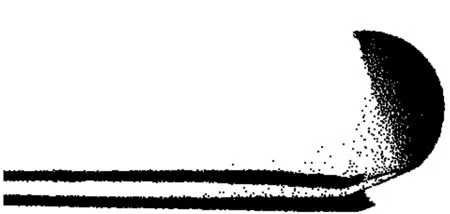
圖2 帶有混合像素的球標靶點云
1.2 混合像素特性
圖2所示為利用三維激光掃描儀掃描地面上球標靶得到的點云,圖中可以發現球標靶背后面有許多孤立、零散的混合像素,這些混合像素無規律地分布于球標靶(前景)和地面(背景)之間。根據對實際點云的分析,混合像素主要有如下兩個特性:①測距異常特性,由于三維激光掃描儀是按照倒“Z”字形的順序掃描,混合像素的大部分掃描鄰近點都在掃描物體前表面和后表面;②密度異常特性,混合像素處的點密度相對整體點云密度小很多。
2混合像素的自動探測方法
2.1 基于球面投影的三維點云三角構網
基于上述分析出的混合像素的特性,本文設計了基于鄰近點深度差的方法來初步識別混亂點云中的混合像素,再利用點云密度統計方法加以約束達到精確提取混合像素的目的。首先采用了張帆提出的基于球面投影的單站地面激光掃描點云構網方法來構建點云拓撲[6]。利用中心投影將單測站點云投影到以測站中心為球心的球面上,然后根據球面投影點的水平、豎直角實施掃描點的構網,從而完成單測站三維點云在歐氏空間下的三角構網[7]。三角構網后,混合像素的測距異常特性更加直觀地體現在其與鄰近點的深度差比較大的特點上。如圖3所示,經過三角構網后可以求出混合像素P0的鄰近點為P1~P8,點P0與其鄰近點有較大的深度差。
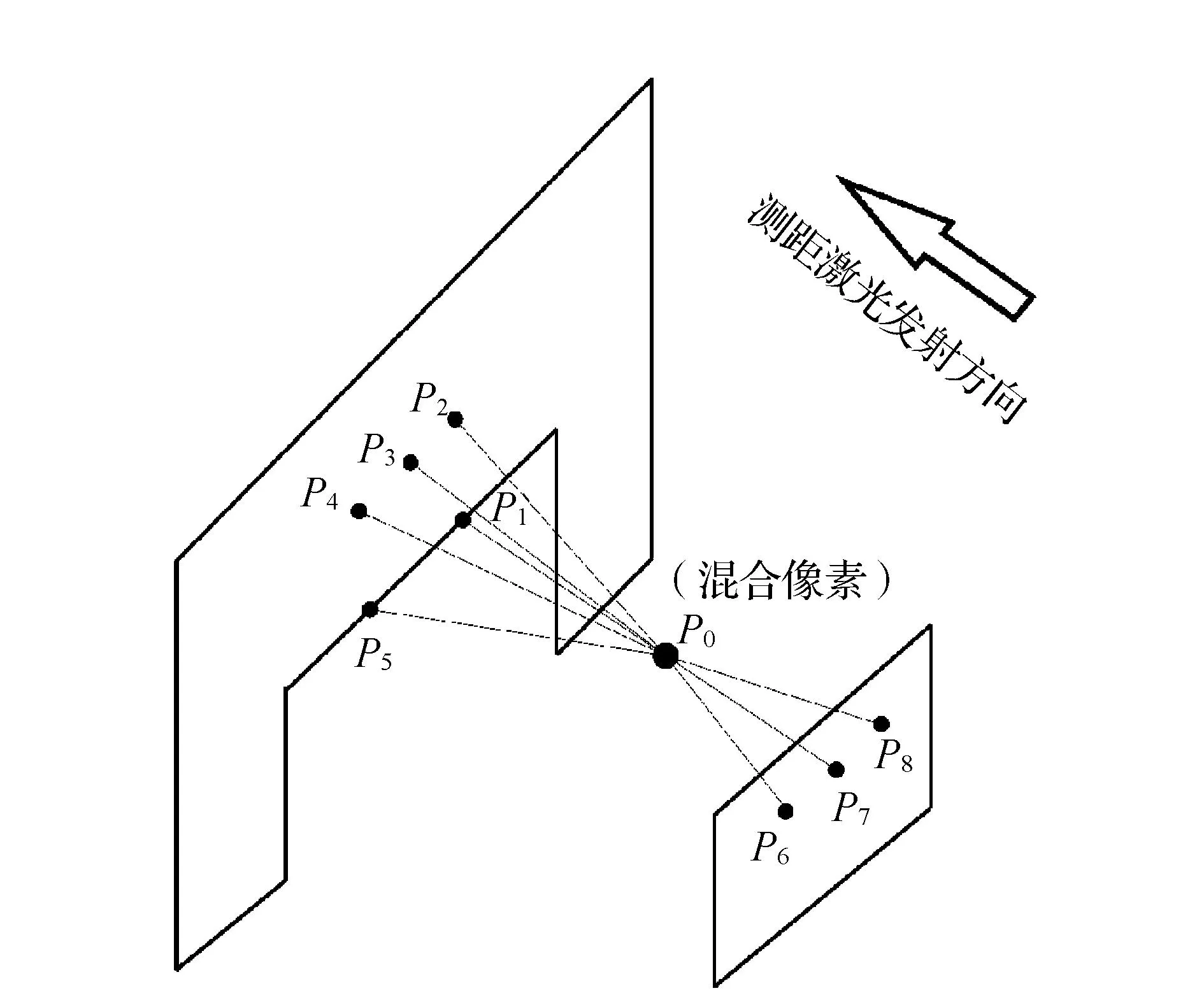
圖3 混合像素拓撲示意圖
2.2 基于深度差的混合像素初步識別
借助混合像素的測距異常特性,即混合像素與其鄰近點具有較大的深度差,本文設計了初步識別混合像素的算法。首先計算每個點與其鄰近點的深度值之差,然后利用統計方法選擇出合適的閾值,最后根據閾值識別混合像素。
(1)
(2)

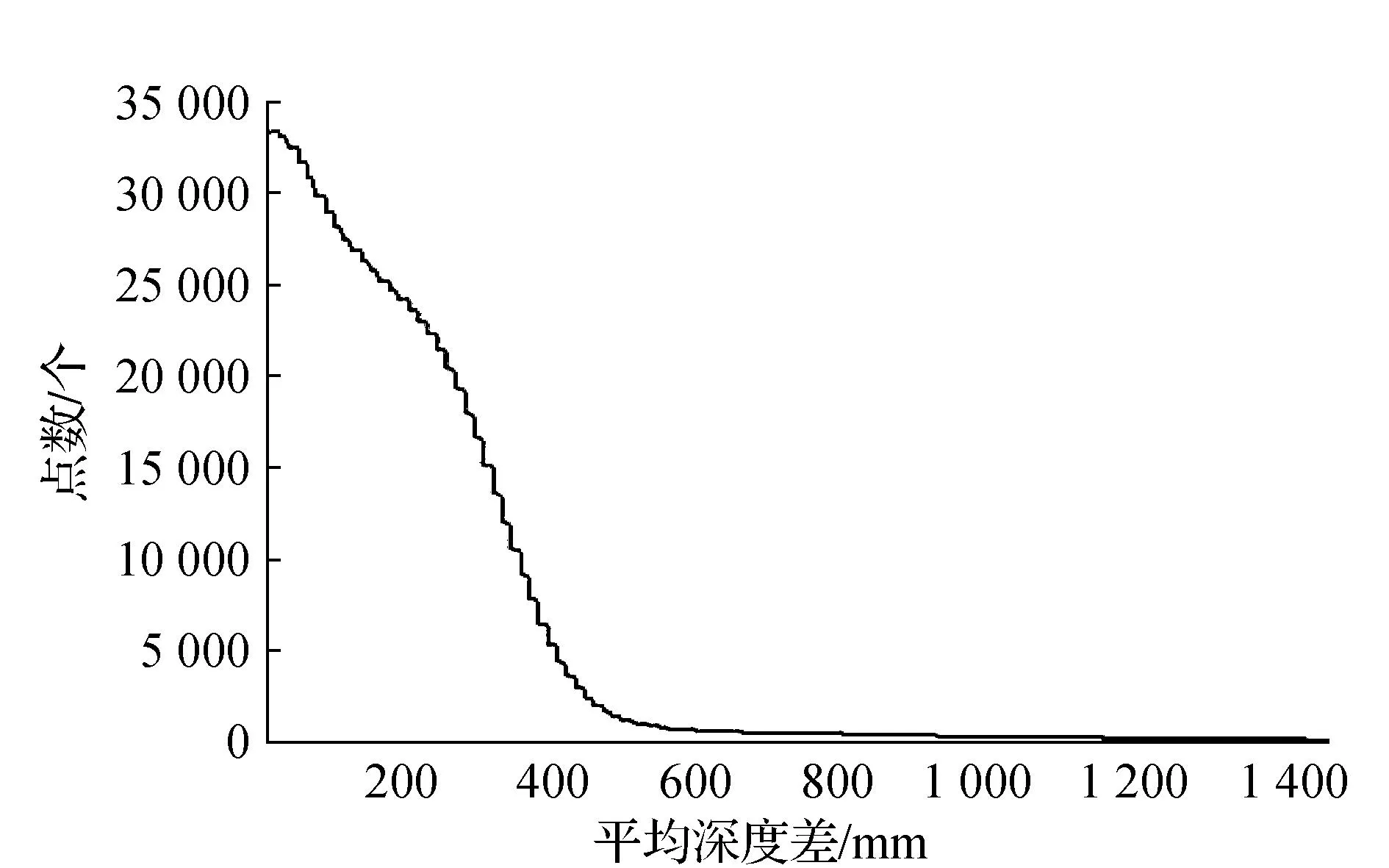
圖4 平均深度差統計
2.3 基于點云密度的混合像素精確識別
對于連續密集采樣的點云,理論上點云各處的密度相差不大。但混合像素特殊的產生機制使得其點云密度較正常掃描點存在明顯差異,如圖2所示點云中的混合像素零散分布于前背景和后背景之間,其所在位置的點云密度不僅比整體點云小很多,而且比階躍邊緣點也小很多。基于混合像素的密度異常特性,本文通過統計點云的密度來區分初步識別點集中的階躍邊緣點和混合像素,以達到精確提取混合像素的目的。
點云中任意點位置的點云密度可以用距離該點一定距離內的鄰近點的數量來表示,鄰近點越少表明其點云密度越小,是混合像素的可能性越大。基于上述分析,本文利用kd-tree的鄰域搜索來估算點云密度,以此進一步區分混合像素和階躍邊緣點。利用kd-tree本文設計了區別階躍邊緣點和混合像素的算法。
1)對點云建立kd-tree索引;
2)設計距離閾值S,并以此計算初步識別出的混合像素(包含了階躍邊緣點和混合像素)的鄰近點個數;
3)設計個數閾值K區別其中的階躍邊緣點和混合像素,鄰近點個數超過閾值的認定為階躍邊緣點,小于閾值的則認定為混合像素。
在上述算法中,關于距離閾值S的設計本文采取的是隨機選取點云中1 000個點,并根據已建立的三角網計算出包含該1 000點的所有三角邊長度的平均值S,以S作為距離閾值。個數閾值K的設計相對簡單,實驗發現一般K值設為5即可以較好地區別階躍邊緣點和混合像素。K值大小的設計可以根據原始點云數據的密度做適當調整,總的來
說只要加入簡單的人工干預即可設計出合適的K值。圖6所示為利用上述方法進一步識別出的混合像素,通過觀察可以發現混合像素與階躍邊緣點被很好地區分開。將原始點云中識別出的混合像素剔除后得到了圖7,通過對比原始點云可以發現本文設計的混合像素識別算法的有效性。

圖6 精確提取的混合像素
圖7 剔除了混合像素的球標靶點云
3實驗結果與分析
本文利用VC++聯合OpenGL編程實現了混合像素識別算法并應用于實際掃描點云,本文中的點云數據均由美國天寶公司生產的Trimble GX200掃描而成。圖8(a)所示為一球形目標的掃描點云,從圖中可以明顯發現墻和球標靶之間多了許多混合像素,混合像素的存在使得擬合之后的目標球心嚴重偏離物體實際中心,并且擬合之后的球陷入了墻面,這與實際是不符的,如圖8(b)所示。利用本文提出算法可以有效地剔除點云中的混合像素如圖8(c)所示,再次擬合后可以發現該球標靶點云的擬合結果更貼近實際,如圖8(d)所示。另外通過觀察可以發現由于混合像素的影響,目標擬合之后的半徑與物體實際直徑存在較大的差值,原始點云(包含大量混合像素)擬合得到的球半徑明顯小于實際球標靶半徑,而剔除了混合像素的點云擬合得到的球與實際球標靶點云更加貼合。圖9(b)為一個含有6個球目標的原始三維激光掃描點云,一共包含10 134個點,圖9(a)為對應現場數碼影像,圖9(c)為原始點云的側視圖。利用本文算法提取出原始點云中的混合像素如圖9(d)所示,圖中文字代表對應球目標所在的位置,圖中一共包含127個點,經分析其中122個點屬于混合像素,5個屬于隨機噪聲點,其中圖中矩形框內的點即誤識別為混合像素的隨機噪聲點。上述實驗證明了本文提出的算法在識別混合像素的有效性,剔除混合像素一定程度提高了后續點云建模的精度,而且本文算法理論上對于大場景大數據點云數據也適用。
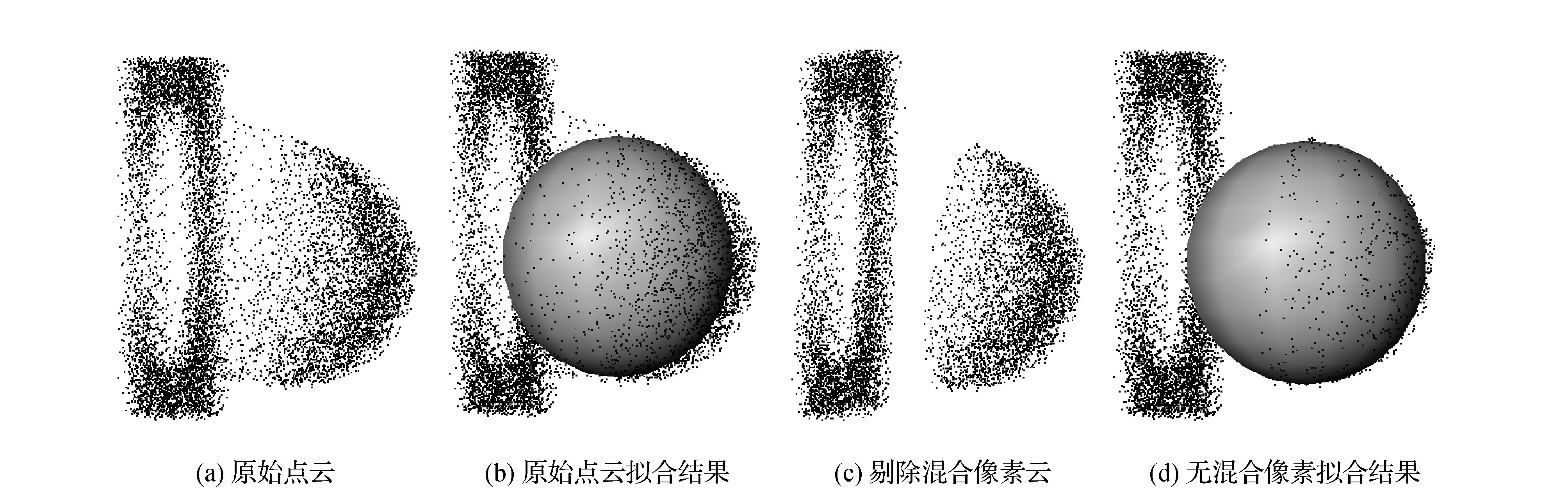
圖8 球標靶實驗
4結束語
混合像素普遍存在于三維激光掃描點云中,而且關于該問題的研究還不夠成熟,所以本文在分析混合像素產生機理的基礎上,提出了地面三維激光掃描數據中混合像素的自動探測和剔除算法,并在
C++軟件平臺上實現。通過實驗結果可知,該方法能有效識別激光點云中的混合像素,可以為后續點云處理提供更為精確的數據。本文提出的混合像素自動探測算法是建立在密集采樣點云的基礎上,如果采集的點云分布不均時可能會影響到混合像素的探測,也是進一步的研究方向。
參考文獻:
[1]赫春曉,李浩.基于三維激光掃描數據的三維實景構建[J].測繪工程,2013,22(1):81-85.
[2]游曉斌,游先祥,相瑩瑩.混合像元及混合像元分析[J].北京林業大學學報,2003,25(S1):28-32.
[3]崔雨勇,曾致遠,付必濤,等.基于邊界提取的混合像元分解[J].人民長江,2008,39(8):115-117.
[4]楊鑫,付夢印,楊毅,等.一種激光點云規則混合像素的提取與校正方法[C].//第九屆全國光電技術學術交流會論文集.2010:205-208.
[5]TULEY J,VANDAPEL N, HEBERT M.Analysis and Removal of Artifacts in 3-D LADAR Data[C]//in IEEE International Conference on Robotics and Automation,2005.
[6]張帆,黃先鋒,李德仁.基于球面投影的單站地面激光掃描點云構網方法[J].測繪學報,2009,38(1):48-54.
[7]鄭德華,龐逸群,曹操.基于橢球面投影的散亂點云建立三角格網方法[J].測繪工程,2010,19(4):19-23.
[8]劉艷豐.基于 kd-tree 的點云數據空間管理理論與方法[D].長沙:中南大學,2009.春曉,李浩.基于三維激光掃描數據的三維實景構建[J].測繪工程,2013,22(1):81-85.
[2]游曉斌,游先祥,相瑩瑩.混合像元及混合像元分析[J].北京林業大學學報,2003,25(S1):28-32.
[3]崔雨勇,曾致遠,付必濤,等.基于邊界提取的混合像元分解[J].人民長江,2008,39(8):115-117.
[4]楊鑫,付夢印,楊毅,等.一種激光點云規則混合像素的提取與校正方法[C].//第九屆全國光電技術學術交流會論文集.2010:205-208.
[5]TULEY J,VANDAPEL N, HEBERT M.Analysis and Removal of Artifacts in 3-D LADAR Data[C]//in IEEE International Conference on Robotics and Automation,2005.
[6]張帆,黃先鋒,李德仁.基于球面投影的單站地面激光掃描點云構網方法[J].測繪學報,2009,38(1):48-54.
[7]鄭德華,龐逸群,曹操.基于橢球面投影的散亂點云建立三角格網方法[J].測繪工程,2010,19(4):19-23.
[8]劉艷豐.基于 kd-tree 的點云數據空間管理理論與方法[D].長沙:中南大學,2009.

[責任編輯:劉文霞]