基于機載LiDAR數據的建筑物輪廓規則化方法
2016-01-12 08:34:02張陽陽,門林杰,李向偉
測繪工程 2015年10期
基于機載LiDAR數據的建筑物輪廓規則化方法
張陽陽1,門林杰2,李向偉3
(1.甘肅農業大學 資源與環境學院,甘肅 蘭州 730070;2.甘肅省國土資源規劃研究院,甘肅 蘭州 730070;3.山東省煤田地質局物探測量隊,山東 泰安 271021)
摘要:在點云數據分類和建筑物輪廓提取的基礎上,提出一種基于最小外包矩形的建筑物輪廓規則化方法。以任意兩相鄰輪廓點構建初始外包矩形,以迭代的方式將內點數最多者作為最終外包矩形,繼而以面積比率、距離和均方根作為指標對規則化結果給出評判,最后以實際數據進行實驗。實驗結果表明,文中提出的方法能夠有效對分類后的建筑物輪廓點進行規則化。
關鍵詞:機載激光三維掃描;建筑物;輪廓線;規則化
中圖分類號:P234
收稿日期:2014-09-01;修回日期:2015-01-12
作者簡介:張陽陽(1987-),女,碩士.
BuildingregularizationbasedonairborneLiDARpointclouds
ZHANGYang-yang1,MEN Lin-jie2,LI Xiang-wei3
(1.CollegeofResourcesandEnvironmentalSciences,GansuAgriculturalUniversity,Lanzhou730070,China;2.GansuInstituteofLandandResourcesPlanningandResearch,Lanzhou730070,China;3.GeophysicalProspectingandSurveyingTeam,ShandongBureauofCoalGeologicalExploration,Taian271021,China)
Abstract:Based on the classification of point cloud and extraction of building boundary,a regularization method for building boundary based on Minimum Bounding Rectangle(MBR) is put forward.First the initial bounding rectangle is constructed by two arbitrary adjacent contour points, of which the optimal one obtaining the most consistent contour points is determined by an iterative manner,and then the results are evaluated by two criterions:area ratio and RMS of the distance between contour points and its corresponding rectangle side. Finally a sample data is taken as an example to carry out the experiment.The results show the method proposed can regularize the contour points effectively.
Keywords:LiDAR;building;contour;regularization

機載激光三維掃描(LightDetectionAndRanging,LiDAR)技術集成了激光測距系統、全球定位系統和慣性導航系統,它能夠快速獲取地球表面三維空間信息,具有效率高、高程精度高、成本低等特點[1],廣泛應用于三維數碼城市[2]、城市規劃[3]、災害評估[4]等領域。建筑物作為人類活動和人類文明的重要載體,是當前多個學科研究的焦點。目前,快速、精確獲取建筑物信息在城市規劃、導航、災害評估等領域具有重要作用。利用機載LiDAR技術進行建筑物提取和重建是目前測繪遙感領域研究的熱點和難點[5]。
本文假設機載LiDAR點云數據經過濾波和分類的過程,獲得建筑物點云數據作為已知數據。由于分辨率等因素,直接從分類后的建筑物點云數據提取輪廓并不準確,鑒于城區現代建筑物相鄰輪廓邊界具有正交這一特性和為了進一步的抽象化表達的需要,本文提出一種基于最小外包矩形探測的建筑物輪廓點規則化方法。
1方法
1.1 建筑物輪廓點提取
關于建筑物點云輪廓提取方法,主要有:基于點云柵格化的方法[6]、基于AlphaShape[7]的方法等。前者在對離散點云數據柵格化的基礎上,根據高程將離散點轉化為距離影像,利用圖像處理的相關理論方法對距離影像進行邊界提取,獲得建筑物輪廓信息。該方法需要將離散點轉換為規則格網,容易造成數據損失、精度降低;后者判定某點是否為邊界點,且計算量大,效率低。
在各建筑物數據中,將點云數據投影至XOY平面,以二倍平均點間距確定格網間距,對點云數據進行格網劃分。在邊界格網單元內部,逐點搜索確定邊界輪廓點:對于某待定點p0,其在XOY平面的投影如圖1所示,計算p0點至各鄰域點的方位,并將該方位按大小進行排序,計算相鄰兩方位間的方位差,若差值大于閾值tha,則該待定點p0為輪廓點,否則為內部點。在圖2中,圖2(a)所示為所選取的樣例區域影像數據,圖2(b)為分類后的建筑物點云數據,圖2(c)為按照本文方法確定的建筑物輪廓點數據。
1.2 輪廓點規則化方法
在單一建筑物內,針對上述步驟獲取的建筑物輪廓點,提出以下迭代的方法對其進行規則化處理。
1)對于該建筑物中某輪廓點,除去最近點確定直線方向,以該方向作為矩形的一個方向,與該方向垂直的方向作為矩形的另一邊,并以該點為原點,建立坐標系,如圖3所示。并將該建筑物輪廓點投影至該局部坐標系的兩坐標軸,以其在兩坐標軸的數據區間長度作為矩形的長和寬;
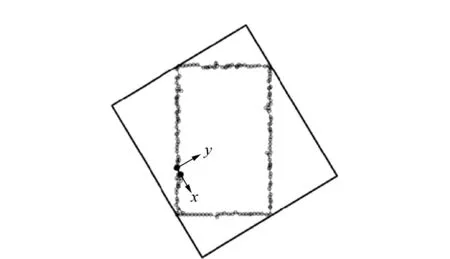
圖3 建筑物輪廓點提取效果
2)根據點密度設定距離閾值thd,確定在該閾值范圍內的建筑物輪廓點數目,記錄點數;
3)對于建筑物內各輪廓點,循環以上過程,以對應輪廓點數最多的矩形模型作為該建筑物的第一層外接矩形模型。
圖4展示某建筑物規劃的過程。圖4(a)為某建筑物的影像圖與邊界點疊加效果圖。圖4(b)為采用上述方法探測到的最小外包矩形,從結果上看,算法探測到的矩形只是建筑物的一種粗略表達。在上述過程獲取的矩形作為建筑物的第一層級最小外包矩形,將剩余邊界點聚類后投影至該層級矩形,如圖4(c)所示,并計算投影后在矩形兩個方向上的長度,若長度大于閾值(為平均點間距二倍),則根據對應區域確定第二層級的最小外包矩形,第二層級可存在多個最小外包矩形,如圖4(d)所示。若長度小于閾值,則不對該聚類結點確定最小外包矩形。將上述過程迭代執行至無剩余輪廓點或輪廓點投影后距離小于閾值,如圖4(e)所示。
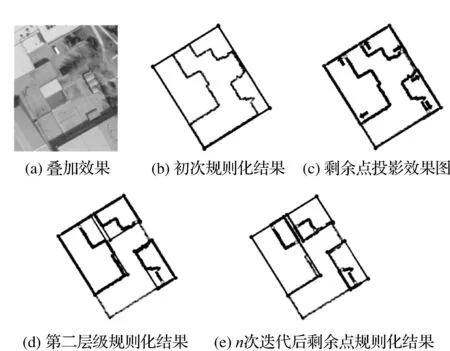
圖4 建筑物輪廓點提取效果
對于探測到的各層級最小外包矩形,本文對上下兩層級矩形外包矩形執行邏輯減運算
(1)
式中:k為當前層級,n為最大層級。在實際中,即使是非常復雜的建筑,層級一般不會超過5。
1.3 規則化結果評估
并非所有的建筑物都由簡單規則矩形組成,另外考慮到建筑物分類時的誤差,上述算法并不適合所有情況。如圖5(a)所示為不規則建筑物的最小外包矩形規則化結果。對上述規則化結果進行評估,本文給出兩項量化評判標準。
1)以邊界點所圍成區域的面積與矩形區域面積做比對,其中邊界點圍成區域面積按式(3)計算。相似性接近于1則表示規則化結果高度逼近邊界點所圍成的區域;
(2)
(3)
2)上述標準并不能鑒定所有結果,如圖5(b)所示,雖然規則化前后面積近似相等,但是,規則化的最小外包矩形并沒有表達其真實結果。在上述標準基礎上,以邊界點到規則化后的最小外包矩形的最近距離均方根作為評判標準。
(4)

圖5 建筑物規則化結果圖
2實驗
為驗證本文方法的性能,選取了ISPRS官網提供的樣例數據作為試驗數據,該數據區域為德國斯圖加特地區,數據采用LeicaALS50系統進行采集,飛行高度平均為500m,平均點密度為6.5pt/m2,數據區域均為居民地,建筑物特征豐富,如圖6(a)所示。算法首先在分類后的建筑物數據集中探測輪廓點。首先將數據集投影至XOY平面,并對數據集進行網格劃分。鄰域搜索中k值為20,最大夾角大于90,即當前點為輪廓點,該數據實驗區域輪廓點探測結果如圖6(b)所示。根據本文所提的迭代最小外包矩形算法對輪廓點規則化,在該過程
中,采用AreaBoundary和RMSDist對結果進行約束,規則前后面積比率大于0.6,RMSDist值小于2倍平均點間距則視當前建筑物可由簡單矩形規則化,結果如圖6(c)所示。
3結束語
機載激光三維掃描技術能夠快速獲取地面建筑物信息。從實驗過程可以看到,本文提出的基于迭代最小包圍矩形的方法能夠將絕大部分規則建筑物的輪廓規則化,該方法適應性強、準確性高。
參考文獻:
[1]張小紅.機載激光掃描測高數據濾波及地物提取[D].武漢:武漢大學,2002.
[2]尚青波.激光LiDAR數據在三維城市模型中的應用[J].科技情報開發與經濟,2010,20(17):137-139.
[3]李勇,黃金浪.利用LiDAR數據測制城市大比例尺地形圖的研究與實踐[J].城市勘測,2010(2):94-95.
[4]余燁,劉曉平,袁曉輝,等.面向洪水災害評估的城市建模與仿真[J].系統仿真學報,2010,22(9):2136-2140.
[5]楊娜,秦志遠,晏耀華,等.面向地面點識別的機載LiDAR點云分割方法研究[J].測繪工程,2014,23(10):18-22.
[6]劉春,李楠,吳航彬,等.基于LIDAR數據的建筑物輪廓提取[J].測繪科學,2012,40(9):1399-1405.
[7]EDELSBRUNNER H,KIRKPATRICK D,SEIDEL R.On the shapes of a set of points in the plane[J].IEEE Transactions on Information Theory,1983,29(4):551-559.
[責任編輯:李銘娜]