基于探測球的固定式掃描海量點云自動定向方法
2016-01-12 08:34:03郭敬平
測繪工程 2015年10期
基于探測球的固定式掃描海量點云自動定向方法
郭敬平
(寧波市鄞州區測繪院,浙江 寧波 315100)
摘要:地面固定式掃描點云首先要將自由坐標系的點云納入國家坐標系,而單站掃描的點云數據量極大,無法在可視環境下進行拼接。針對現有方法對海量點云拼接的不足,提出一種基于探測球的固定式掃描海量點云自動定向方法,該方法通過數據關聯技術讀取海量點云、建立標靶搜索環、球擬合確定標靶候選點、全組合距離匹配法確定同名點及坐標轉換參數解算等,完成點云的自動定向過程。通過實驗驗證文中算法的有效性及可行性。
關鍵詞:海量點云;定向標靶;點云絕對定向;扇形等距離索引;全組合距離匹配
中圖分類號:P237
收稿日期:2014-07-14;修回日期:2015-02-28
作者簡介:郭敬平(1979-),男,高級工程師.
An auto registration method for fixed type of scanned HPC based on detecting balls
GUO Jin-ping
(Ningbo Institute of Surveying and Mapping Yinzhou District,Ningbo 315100, China)
Abstract:The point cloud data of fixed terrestrial scanning are used for topographic mapping,of which the data should be transformed from free coordinate system into national coordinate frame.However,due to the huge quantity of point cloud for single-station scanning,the data can not be registered in a visual environment.For the deficiency of existing registration methods for huge point clouds (HPC),an auto method for fixed type of scanned HPC based on detecting balls is put forward.The automatic registration process is implemented by reading point clouds through data association, searching target-searching loops,followed by fitting spheres for candidate targets,extracting corresponding points using distance matching, and calculating the transformation parameters.Experiments demonstrate the effectivity and feasibility of the proposed algorithm.
Key words:huge point cloud;orientation target;absolute orientation for point cloud;concentric equidistant index;distant matching of full combination

隨著三維激光掃描儀硬件性能的提高,3D掃描技術日趨成熟[1],基于地面的激光掃描系統TLS(Terrestrial Laser Scanning)單站掃描點云數量越來越大,GB級的海量點云使得在現有普通計算機難以基于內存進行點云的定向、降噪、植被過濾、地面點云獲取[2]、地圖要素提取[3]等處理過程,成為亟待解決的技術瓶頸。為了將地面固定式掃描點云應用于地形測繪,首先要將自由坐標系的點云納入國家坐標系,但單站掃描的點云數據量無法在可視環境下用文獻[4]和[5]中方法進行兩站或多站點云的拼接。地形測繪中,兩站掃描的點云僅有一小部分重疊且重疊的位置未知[6],無法用迭代最近點法ICP(Iterative Closest Point)[7]實現基于表面特征匹配[8]和區域形狀分析法[9]的自動拼接,需要新方法將點云納入到測量的坐標系中。
為此,本文在充分利用球形定向標靶具有幾何定向精度高及易于識別的特性基礎上,提出一種基于探測球的固定式掃描海量點云自動定向方法,包括三個環節:①用數據關聯技術讀取海量點云;②用等距離扇形分區法建立點云空間索引;③用全組合距離匹配法確定匹配點(標靶球中心的地理坐標與掃描坐標對應),實現標靶球海量點云自動定向。
1海量點云的空間索引和自動定向原理
1.1 海量點云讀取和搜索區確定
一站點云分布統計規律,0.1D(D為掃描儀測程,高密度區)點占86%,0.1D~0.3D(中密度區)范圍的點占12.3%,大于0.3D(低密度區)的點占1.7%(見圖1),星點一般在中密度區,這個區就是搜索區。根據GPS測得各球形標靶的國家地理坐標和水準測量的高程,確定標靶范圍,用數據關聯技術分段讀取坐標,每段讀取1 000萬個點,從每段數據過濾出標靶所在范圍的點,如圖2所示;取出每個標靶所在環形點云,如圖3所示。
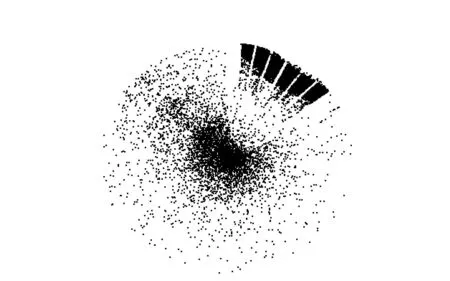
圖1 原始有效范圍點云
1.2 點云扇形等距空間索引
對點云建立空間索引現有的方法有k-d樹索引結構[10]、十叉樹空間索引[11]和球形空間索引等[12]。環形點云按等距離分區,如圖4所示,建立點云扇形等距平面索引數據庫。該方法與矩形分區的矩形分區搜索球時,球上的點最多可能分布在四個區域,而扇形結構搜索時,則球上的點最多分布在兩個區域中,減少了重復擬合次數。
圖4 扇形等距離分區
扇形等距索引相對于扇形等角度索引的優點是能保證離掃描站不同距離的標靶搜索格大小基本一致。
1.3 候選星點確定
標靶點云如圖5所示,按照扇形等距平面索引方法,以一個點云帶為一個探測區,將探測區利用對應的中心角分成多個扇形,以每個扇形為探測單元,用球面擬合法逐單元進行球探測,從此得到一系列擬合半徑與已知半徑之差在2 cm之內且不同圓球度的星點,而后將圓球度在85%以上的星點作為候選點。候選點的圓球度
(1)
式中:dist(O,Pk)為球面點到球心球面點的無符號距離函數[15],r0為球的已知半徑,r為擬合球半徑,通常選擇C大于85%的為可信球。

圖5 要探測的球
1.4 標靶球心坐標確定
1)刪除重復點:在確定候選點后,選擇第一個球,計算后面所有球到此球中心距離,刪除距離小于2 cm的重復球。

3)重采樣和星點坐標精化:獲得同名點后,對星點點云進行重采樣并進行擬合,見圖6、圖7。進而刪除擬合誤差大的點(人工刪除結合算法),二次擬合星點坐標。
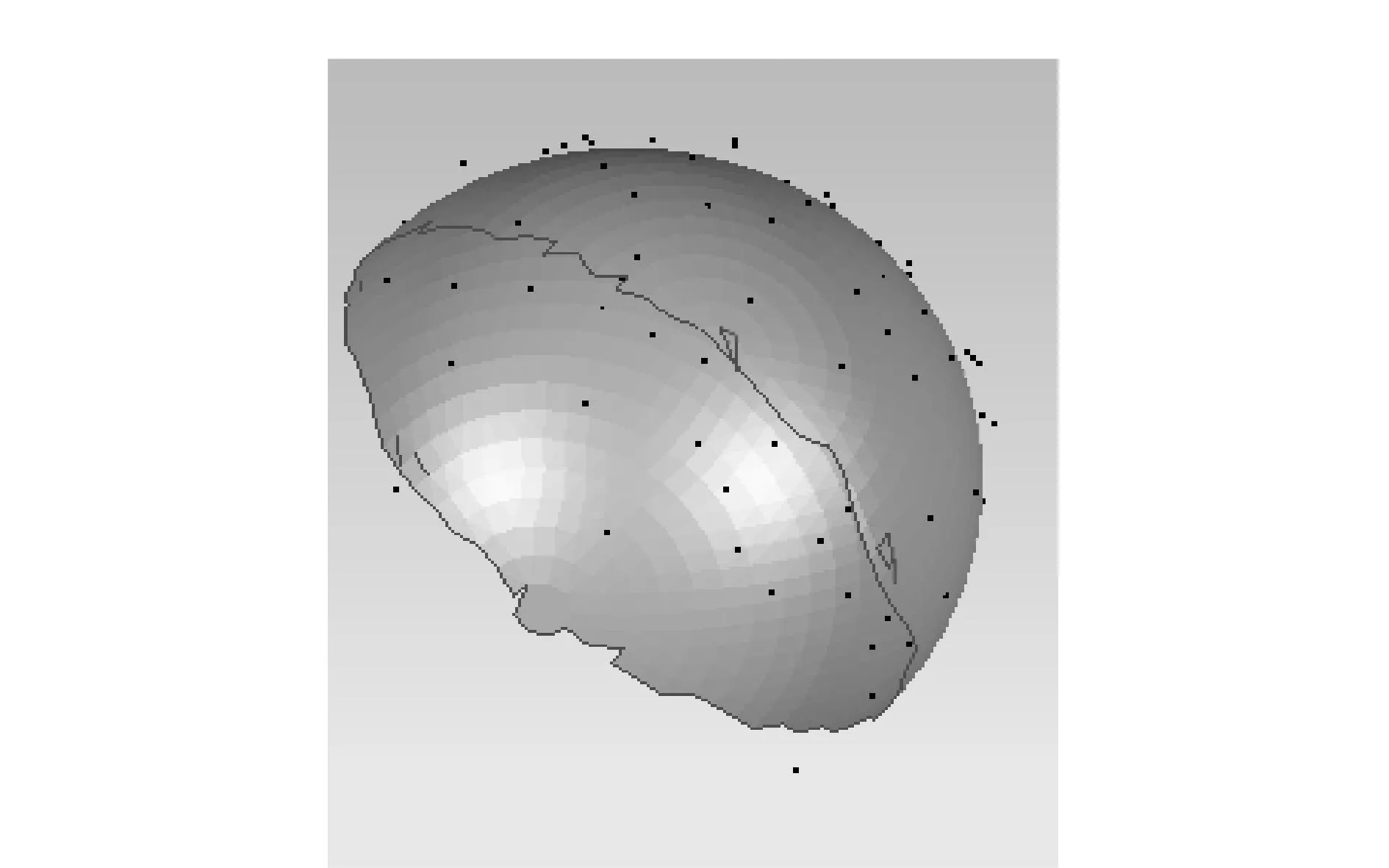
圖7 擬合球面2
1.5 坐標轉換參數求解
用星點GPS測量坐標和掃描坐標,平差計算三維坐標轉換參數,組成定向矩陣,將掃描坐標轉換到國家地理坐標,實現進行點云的定向,點云定向矩陣定義為
(2)
式中:ΔX,ΔY,ΔZ為平移參數,其實質是掃描儀中心的地理坐標,a,b,c是反對稱矩陣中三個參數,是縮放因子,一般取1 。其它9個元素是點云繞三個坐標軸三個旋轉角的函數(構成旋轉矩陣)。點云定向6個自由度SDOF (Six Degrees of Freedom)由Besl,McKay[6]給出。
2實驗及分析
本實驗所用數據來自某礦山實際掃描多站掃描點云,掃描儀器為Riegl VZ-1000。礦區3.2 km×2.8 km,共掃描47站,每站設四個標靶球,每站約1億個點。以第29站為例,說明本方法可行性。將4個排球作為球形標靶如圖8所示,放在經過精平的三角基座上,球心三維坐標由GPS和水準測量獲得。建立等距離扇形索引后,對每個扇形區點進行探測和球面擬合,擬合半徑與球理論半徑相差不大于1 cm,則認為該區可能有標靶球(候選球),共18個候選球,結果見表1。
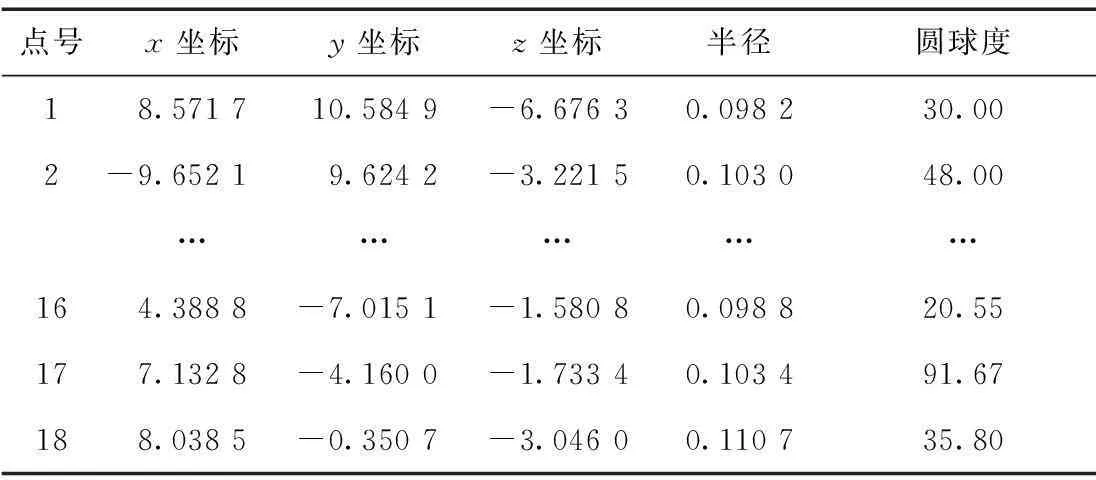
表1 標靶候選球 cm
然后計算候選球的圓球度,圓球度大于85%的可信球6個,見表2,刪除重復球后,就是4個星點上的球數據見表3。
自動探測的結果與人工刪除噪聲點后的結果進行球面擬合,結果如表4所示,Q2903球半徑相差比較大,這是因為表面有較多的噪聲點,精化算法有待于改進。Q2901、Q2902、Q2904星點處半徑差在1 cm之內,符合要求。為了測試軟件自動定向效率,用不同大小點云,在不同配置的計算機進行定向,所用時間見表5。
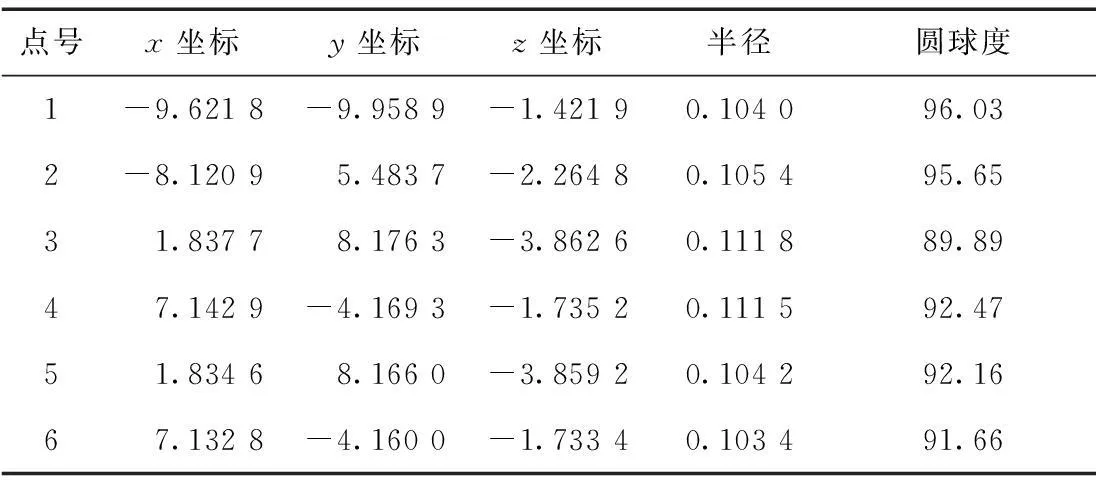
表2 可信球 cm
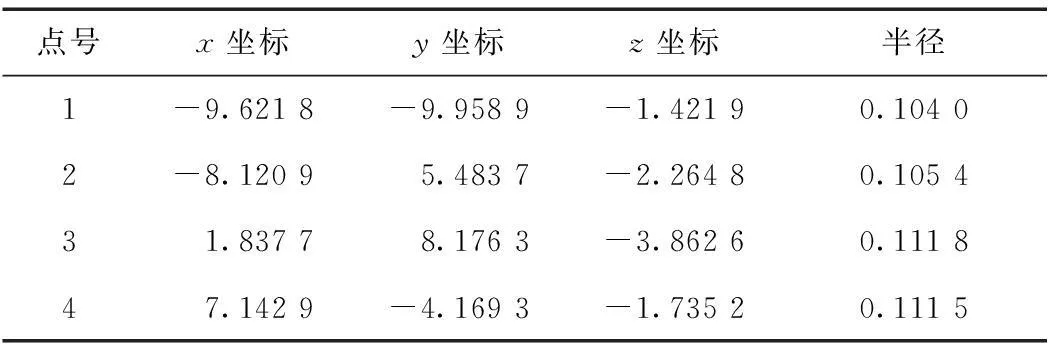
表3 定向球坐標 cm
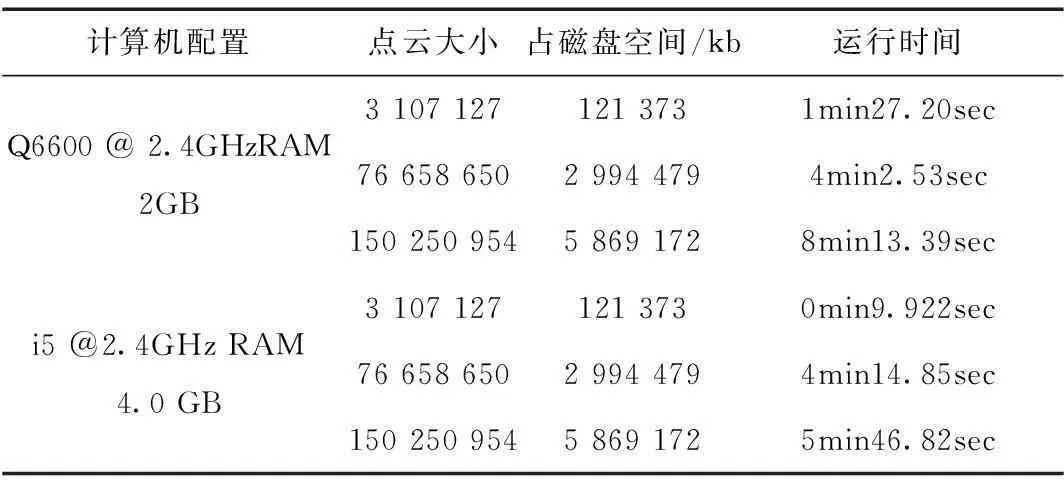
表5 運行時間
3結束語
本文提出的方法能實現單站點云靶標自動檢測與快速定向,將多站掃描點云納入國家坐標系,大大提高了點云的拼接效率,提高點云定向精度,降低其對點云處理及應用的影響。
參考文獻:
[1]WANDA M,et al..Processing and interactive editing of huge point clouds from 3D scanners[J].Computers & Graphics 2008,32:204-220.
[2]張會霞,陳宜金,劉國波.基于三維激光掃描儀的校園建筑物建模研究[J].測繪工程,2010,19(1):32-34,38.
[2]赫春曉,李浩.基于三維激光掃描數據的三維實景構建[J].測繪工程,2013,22(1):81-85.
[3]VAN de Giessen,VOS F M,GRIMBERGEN C A,VAN Vliet L J,et al.An efficient and robust algorithm for parallel groupwise registration of bone surfaces[J].Med Image Comput Comput Assist Interv.2012;15(3):164-171.
[4]JIAN Yao,MAURO R R,PIERLUIGI T,et al.Robust surface registration using N-points approximate congruent sets[J].EURASIP Journal on Advances in Signal Processing,2011,(1):1-27.
[5]TORRE-FERRERO C,LLATA J R,ALONSO L,et al.3D point cloud registration based on a purpose-designed similarity measure[J].EURASIP Journal on Advances in Signal Processing 2012,(3):1-15.
[6]Ondˇrej Jeˇz.3D Mapping and Localization Using Leveled Map Accelerated ICP[C].// European Robotics Symposium 2008,2008,2:466-473.
[7]LI N,CHENG P,SUTTON M A,et al.Three-dimensional Point Cloud Registration by Matching Surface Features with Relaxation Labeling Method[J].Experimental mechanics,2005,45(1):71-82
[8]HUANG D,et al.3D Face Recognition Based on Local Shape Patterns and Sparse Representation Classifier[J].Advances in Multimedia Modeling,2011,65(23):206-216
[9]JOCHEM A,et al.Area-wide roof plane segmentation in airborne LiDAR point clouds[J].Computers,Environment and Urban Systems,2012,(36):54-64.
[10]Jagan Sankaranarayanan,SAMET H,VARSHNEY A.A fast all nearest neighbor algorithm for applications involving large point-clouds[J].Computers & Graphics,2007,(31):157-174
[12]MA Hongchao,WANGA Zongyue.Distributed data organization and parallel data retrieval methods for huge laser scanner point clouds[J].Computers & Geosciences,2011,(37):193-201. M,et al..Processing and interactive editing of huge point clouds from 3D scanners[J].Computers & Graphics 2008,32:204-220.
[2]張會霞,陳宜金,劉國波.基于三維激光掃描儀的校園建筑物建模研究[J].測繪工程,2010,19(1):32-34,38.
[2]赫春曉,李浩.基于三維激光掃描數據的三維實景構建[J].測繪工程,2013,22(1):81-85.
[3]VAN de Giessen,VOS F M,GRIMBERGEN C A,VAN Vliet L J,et al.An efficient and robust algorithm for parallel groupwise registration of bone surfaces[J].Med Image Comput Comput Assist Interv.2012;15(3):164-171.
[4]JIAN Yao,MAURO R R,PIERLUIGI T,et al.Robust surface registration using N-points approximate congruent sets[J].EURASIP Journal on Advances in Signal Processing,2011,(1):1-27.
[5]TORRE-FERRERO C,LLATA J R,ALONSO L,et al.3D point cloud registration based on a purpose-designed similarity measure[J].EURASIP Journal on Advances in Signal Processing 2012,(3):1-15.
[6]Ondˇrej Jeˇz.3D Mapping and Localization Using Leveled Map Accelerated ICP[C].// European Robotics Symposium 2008,2008,2:466-473.
[7]LI N,CHENG P,SUTTON M A,et al.Three-dimensional Point Cloud Registration by Matching Surface Features with Relaxation Labeling Method[J].Experimental mechanics,2005,45(1):71-82
[8]HUANG D,et al.3D Face Recognition Based on Local Shape Patterns and Sparse Representation Classifier[J].Advances in Multimedia Modeling,2011,65(23):206-216
[9]JOCHEM A,et al.Area-wide roof plane segmentation in airborne LiDAR point clouds[J].Computers,Environment and Urban Systems,2012,(36):54-64.
[10]Jagan Sankaranarayanan,SAMET H,VARSHNEY A.A fast all nearest neighbor algorithm for applications involving large point-clouds[J].Computers & Graphics,2007,(31):157-174
[12]MA Hongchao,WANGA Zongyue.Distributed data organization and parallel data retrieval methods for huge laser scanner point clouds[J].Computers & Geosciences,2011,(37):193-201.
[責任編輯:李銘娜]