飛機外掛物管理系統無線原位檢測技術研究
2015-12-31 17:22:56紀超王昆
計算技術與自動化 2015年3期
紀超 王昆


摘要:原位檢測技術是一種無損檢測方法,可在設備運轉或基本不拆卸的情況下,對某些設備零件或部位進行檢查和測試。本文以飛機外掛物管理系統為研究對象,針對其設備的原位檢測問題進行研究,根據飛機外掛物管理系統設備的特點,設計有針對性的原位檢測系統。該檢測系統要求測試設備小型化、低功耗、便于攜帶和能夠滿足外場試驗檢測。本系統以微控制器STM32F103ZET6為核心,將高性能的ARM芯片、ZigBee無線通信技術以及模塊化的功能電路結合在一起,并最終在遠程監控終端實現檢測參數的顯示。最后通過系統的軟硬件調試,實時的顯示出飛機外掛物管理系統設備的狀態信息,實現了系統的設計初衷。
關鍵詞:原位檢測;飛機外掛物管理系統;ZigBee;STM32F103ZET6
中圖分類號:TP273 文獻標識碼:A
1引言
外掛物管理系統是飛機綜合火控系統的一個組成部分,它通過外掛發射裝置與航空武器(機炮、導彈、火箭、炸彈)相連,具有監控武器狀態,接收火控系統命令,向武器發送關鍵參數;結合飛行員的操作確定攻擊狀態、自動選擇武器、控制武器正常和應急發射等功能。在現代航空設備檢測技術手段中,原位檢測技術是其新的重要組成部分,由于該技術不對飛行器設備及其結構進行拆卸和分解,既能夠迅速、準確有效地檢測飛機、火箭、導彈等機載設備的性能,又可以杜絕因拆裝不當造成的人為故障和機件損傷。隨著科技的不斷發展,越來越多的企業和機構通過做無線通信和原位檢測技術相結合的嵌入式系統方式用于飛機定檢,也用于特檢和日常維護。
目前,比較流行的無線通信技術主要有藍牙、紅外、Wi-Fi和ZigBee等。其中ZigBee技術是一種近距離、低成本、低功耗、低速率的雙向無線通信技術,是基于IEEE802.15.4標準開發出來的關于組網、安全和應用方面的通信技術,特別適用于工業檢測、監控和傳感器網絡等領域。
本文把ZigBee無線通信技術應用到飛機外掛物管理系統設備參數的原位檢測中,采取適合方法實現多數據的自動采集、傳輸和顯示,為工業參數在線檢測提供了一種全新的解決方案。在條件惡劣、不易布線、人員不易進入或需要對某運轉設備參數進行長期檢測等環境中,這種解決方案的優勢尤其明顯。
2飛機外掛物檢測系統方案設計
2.1系統描述
飛機外掛物管理系統設備檢測系統的工作流程及原理如工作示意圖見圖1所示。
飛機外掛物管理系統設備檢測系統的工作流程是,首先用專用型號電纜將飛機外掛物管理系統設備和子設備連接,采集到相關信息后再通過Zig-Bee通信模塊將數據參數發送給遠程手持監控終端,最后當遠程監控終端接收到數據先進行校驗,校驗無誤后再通過軟件處理,最終將設備的動態信息顯示出來。
2.2系統組成與整體設計
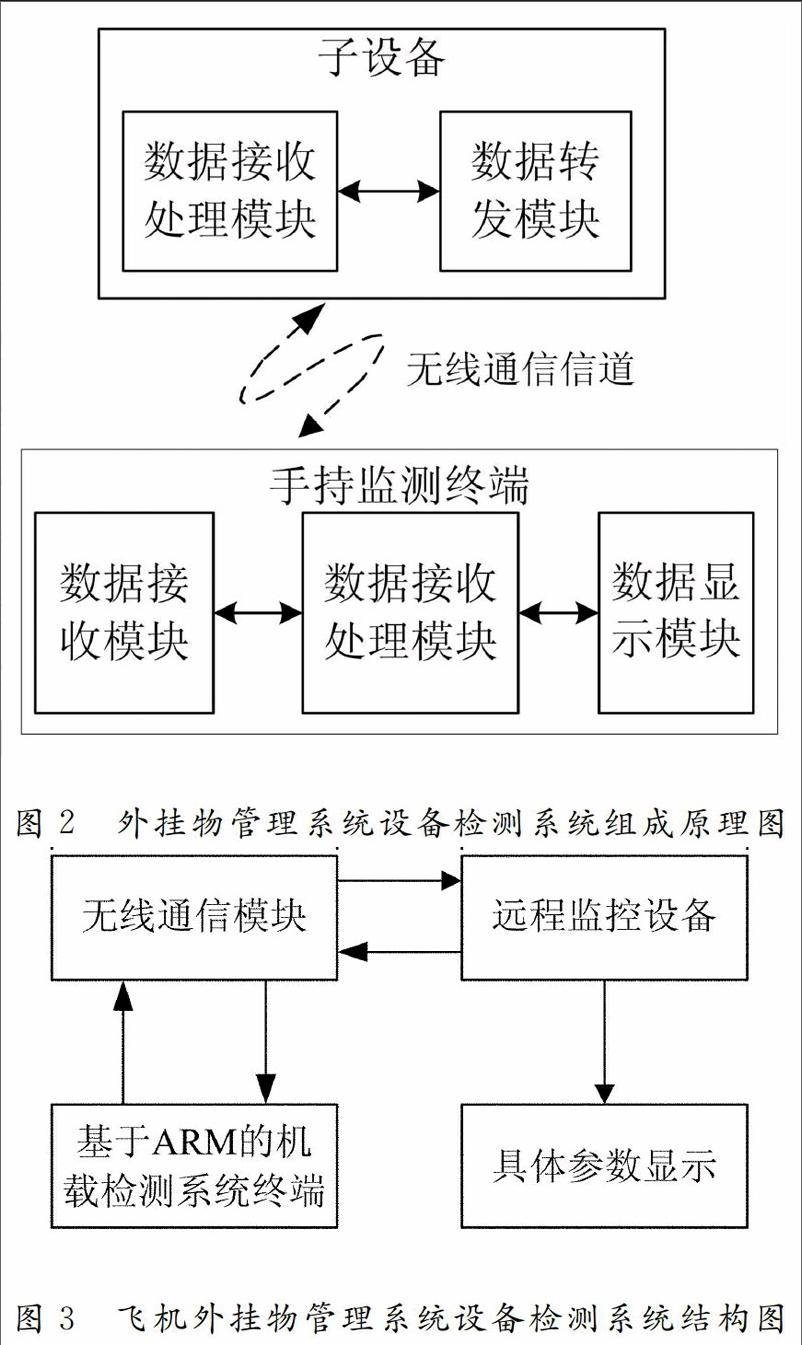
由以上對飛機外掛物管理系統設備檢測系統的工作流程分析可以看出,飛機外掛物管理系統設備檢測系統一般是由數據采集設備和遠程監控終端兩大部分構成,如圖2所示。
子設備將ARM微處理器、串行接口模塊以及遠程無線發送模塊集成與一體,主要完成數據的采集、處理和發送功能。遠程監控終端則通過軟件進行數據的分析、處理及顯示。本文將無線通信技術與嵌入式系統融合在一起,提出一個基于ARM嵌入式系統與ZigBee通信技術的原位檢測硬件平臺的解決方案。其中ZigBee模塊與ARM嵌入式系統之間采用RS232接口通訊,將采集到的數據通過ZigBee通信傳送到遠程監控終端并顯示。系統總體設計方案框圖如圖3所示。
其中無線通信模塊與基于ARM的機載檢測系統終端通過串口相連。遠程監控終端與無線通信模塊通過USB相連,當遠程監控終端接收到機載終端發送的設備參數信息后,便調用顯示程序將設備的動態信息實時的顯示在手持機的屏幕上。
3子設備硬件設計與實現
3.1硬件設計方案
子設備用來測試飛機外掛物管理系統設備的插座信號,其中模擬量信號5路,開關量信號14路。考慮到測試的可靠和穩定性,測試過程中監視子設備的電池電壓采用1路模擬量采集。因此,共6路模擬量信號,14路開關量信號。
系統的設計目標與預期效果進行深入了解后,按照模塊化的電路設計思想,在以STM32F103ZET6微控制器為核心基礎上,設計出各功能模塊的原理電路。系統的總體硬件設計方案如圖4所示。
3.2硬件設計實現
1)STM32F103ZET6微處理器電路設計
對于STM32F103ZET6微處理器,復位電路采取上電自動復位的方式,系統時鐘的選擇是在啟動時進行,復位時內部8MHz的RC振蕩器被選為默認的CPU時鐘,隨后可以選擇外部的、具有失效監控的4-16MHz時鐘;當檢測到外部時鐘失效時,它將被隔離,系統將自動地切換到內部的RC振蕩器,如果出現中斷,軟件可以接收到相應的中斷。同樣,在需要時可以采取對PLL時鐘完全的中斷管理(當一個間接使用的外部振蕩器失效時)。當HSI作為PLL時鐘的輸入時,最高的系統時鐘頻率只能達到64MHz;而當使用USB功能時,必須同時使用HSE和PLL,CPU的頻率必須是48MHz或72MHz,當需要ADC采樣時間為1μs時,APB2必須設置在14MHz、28MHz或56MHz。為了提高電壓測量精度,系統采樣時選用外部參考電壓源REF2930。
2)開關量信號設計
對于28V/懸空信號,將光耦的陰極接地,被測信號接人光耦的陽極。如當被測信號懸空時,IN0通過電阻下拉至GND;當被測信號為28V時,三極管導通,IN0為+3.3V,IN0由三極管的發射極輸入到STM32F103ZET6,STM32F103ZET6通過讀取IN0狀態實現對28V/懸空信號的測試。當被測信號為脈沖串時,STM32F103ZET6將脈沖數量記錄下來并上傳至ZigBee。
GND/懸空分為兩種類型:1、對于特殊的GND/懸空信號,如果被測設備插座中具有存在、聯鎖、聯鎖回線等在直流電源1未提供就存在的信號時,采用隔離的電源ISO-5V為光耦陽極提供電源,被測信號接人光耦的陰極;2、對于一般的GND/懸空信號,直流電源1存在,將光耦的陽極接被測插座直流電源1為光耦提供電源,被測信號接入光耦的陰極。當被測信號懸空時,IN24通過電阻下拉至GND。當被測信號為GND時,三極管導通,IN24為+3.3V,IN24由三極管的發射極輸入到STM32F103ZET6,STM32F103ZET6通過讀取IN24狀態實現對GND/懸空信號的測試。
3)模擬量信號設計
檢測中需采集測試設備自身電池電壓,以了解電池是否正常工作,對于電池電壓的測試,采取電阻分壓并經運放緩沖后輸入到STM32F103ZET6。前級電源電路輸出+5V信號BAT_OUT通過C33以及C41電容進行濾波,其中電阻R112以及R113對BAT_OUT電源信號進行分壓。隨后經過運放OP291GS緩沖后送給ADC進行采樣。
被測件交流電壓為飛機三相115V電源,對其采取采用電流型電壓互感器隔離輸入具有差動輸入的RMS-DC變換芯片并經運放緩沖,輸入STM32F103ZET6的AD接口進行采集。電流型電壓互感器選用星格公司SPT204A,輸入額定電流為2mA,額定輸出電流為2mA,具有良好的線性(小于0.1%)但在使用時需要將電壓信號變換成電流信號并且將前級限流電阻R1、T1安裝在信號轉接盒中,可避免強電信號引入測試終端并減小測試終端體積。
4)電源電路設計
由前級電源板輸入子設備的電源有電池、電池變換后的+3.3V,以上電池、+3.3V供內部STM32F103ZET6、與STM32F103ZET6連接的調理電路使用,將電池進行升壓至+5V經電源模塊隔離后供前端調理使用。其中涉及到的核心元件分別為LTC3203EDD-1和IB0505LT-W75。
4系統軟件設計與實現
4.1子設備軟件結構
子設備的固件程序即STM32軟件的基本結構如圖5所示,該程序主要由初始化模塊、串口中斷及處理模塊、數據定時采集模塊、脈沖計數模塊、串口數據打包發送模塊以及看門狗構成,下面對程序的組成部分分別介紹。
4.2ZigBee無線通信模塊固件程序設計
ZigBee無線通信模塊實現無線串口通信功能。采用Jennic公司的新一代無線微處理器模塊JN5139系列ZigBee模塊,該系列的模塊化解決方案可以大大節省開發時問,易于集成到產品中。本測試系統中無需修改硬件線路將該系列模塊直接無縫引入子設備和手持機,直接進行固件程序開發即可。
該系列模塊開發套件提供豐富的開發例程,稍加修改即可移植到本次測試系統的設計中。綜合考慮各方便因素,本次開發采用Zigebee協議的基礎協議802.15.4。為了方便驗證設計和測試,系統網絡架構初期設計為點對點網絡,后期考慮設計為手持機為中心的星形網絡架構。
4.3手持機軟件設計
手持機通過Zigbee模塊實時接收子設備發送的數據,對接收到的數據解碼后,提取出被測件的各項測量值并顯示在軟件界面上,另外手持機還可以對各子設備進行復位、查詢等操作。手持機的上述功能是通過專門設計的手持機軟件實現的,手持機采用的操作系統為Windows Embedded CE6.0。
圖6為手持機軟件流程圖。其中,初始化模塊主要完成軟件界面初始化、串口通信初始化、創建讀串口線程等組成。串口數據處理線程模塊主要用來定時查詢串口。如果有數據則進行狀態機解碼,按照通信協議解析出的被測件有效數據,存儲在數據結構SUB2CE中,方便軟件存儲測試數據以及在界面上定時顯示。手持機可以對子設備進行查詢、復位等操作,點擊軟件界面上的復位或查詢子設備按鈕時,軟件生成符合通信協議的數據,存儲到數據結構CE2SUB中,通過串口發送出去,經由ZigBee模塊組成的無線串口,到達子設備。
5系統調試與運行
5.1無線串口軟件仿真測試
在對子設備和手持機進行測試前,需測試無線串口軟件的功能是否符合要求。無線串口是由兩塊Jennic公司的JN5139系列ZigBee模塊構成的,兩模塊芯片內燒寫了上一章設計的ZigBee無線通信模塊固件程序,兩模塊上電后,可以自動連接,并且讀取各自的串口數據通過無線連接發送給對方。對無線串口軟件的測試如下:
兩塊ZigBee模塊通過USB轉串口線分別與兩臺計算機的USB接口連接,在兩臺計算機上分別運行串口調試助手軟件,設置好波特率數據位和停止位,打開相應的串口,輸入固定的數據,點擊定時發送。經過長時間大數據量測試,檢查兩臺計算機上的串口調試助手可以發現,兩串口數據收發正常,較好的實現了無線串口軟件功能。
5.2子設備軟件仿真測試
將固件程序燒寫進STM32芯片中,上位機運行在PC端,程序采用LabWindows/CVI設計,如圖7所示,PC同ZigBee模塊使用USB轉串口線連接。子設備上電后,可以發現上位機程序收到了子設備的數據并顯示在界面上,STM32發送不斷增加,點擊上位機軟件界面中的復位按鈕,界面上STM32發送數據項回0,這說明子設備可以采集到所需的數據,并且通過無線串口和外界通信正常。
5.3手持機軟件仿真測試
采用Visual C++2008編寫完成手持機軟件后,可以使用SDK自帶的WinCE6.0模擬器進行軟件仿真測試。首先使用虛擬串口軟件給計算機添加一對串口,方便模擬器進行串口調試。然后模擬器映射使用其中一個串口,PC串口調試助手使用另一個即可進行互相收發數據,進行軟件功能仿真測試。串口調試助手按照通信協議格式發送數據55 AA 30 00 00 00 68 00 00 00 F9 9F D1 FE 00 20 B7 C7 A0 FF 00 04 41 1D 46 0C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 C2 06 00 00 00 00 00 B7,手持機軟件界面收到數據并解析顯示,軟件界面點擊復位或查詢,串口調試助手收到符合通信協議格式的數據,仿真測試表明,手持機軟件可以滿足測試系統的要求。
6結束語
本系統的設計主要是為遠程監控飛機外掛物管理系統設備所設計的,可將設備信號參數通過ZigBee無線通信的方式傳送到遠程手持監控終端。從系統的設計目標出發,詳細介紹了系統硬件電路原理圖的設計。隨后,對系統子設備和手持機的軟件設計進行了專門的敘述,按照功能模塊的劃分設計了數據采集和發送和數據接收和顯示的程序。描述了子設備和遠程手持監控終端中的軟件的實現過程。最終通過軟硬件的測試給出了測試參數,系統目前已經基本實現了設計的預期目標,具有一定的實用價值。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
工業設計(2016年12期)2016-04-16 02:52:00