高速列車牽引電機直接轉矩控制仿真與分析?
2015-12-31 11:06:16徐子峻鄔平波崔利通
機械工程與自動化 2015年1期
徐子峻,鄔平波,崔利通
(西南交通大學 牽引動力國家重點實驗室,四川 成都 610031)
0 引言
直接轉矩控制法是上個世紀中期在矢量控制的基礎上發展起來的新型控制方法[1-2]。把轉矩直接作為被控量進行控制,省掉了復雜的矢量變換運算,其控制結構簡單,控制手段直接,是一種具有較高動態響應的交流調速技術[3]。在直接轉矩控制中有兩種磁鏈控制方式,即六邊形磁鏈和圓形磁鏈。六邊形磁鏈控制結構簡單,逆變器開關頻率小,但是電流、磁鏈脈動較大。圓形磁鏈控制磁鏈脈動量較小,但是開關頻率相對較大。本文根據高速列車牽引電機的工作特點,結合了這兩種控制方式的優點,同時考慮了低速時定子電阻壓降的影響,建立了適用于高速列車牽引傳動系統的直接轉矩控制模型。
1 圓形磁鏈控制
對于定子磁鏈位置的判斷,傳統的方法是將磁鏈分成6個扇區。這種傳統方法是建立在忽略定子電阻壓降影響的基礎上的,認為轉矩的變化由轉矩角度來決定,并不受定子磁鏈幅值影響。但是如果考慮電阻壓降的影響,空間電壓矢量選擇表在某些情況下是不準確的,因此為了改善傳統六扇區控制的不利影響,本文采用十二扇區細分的方法[4]。這種方法是在傳統磁鏈六扇區的基礎上將磁鏈再度細分,分為十二個扇區,如圖1所示。
當θ在-15°~15°區間內,當前定子磁鏈處于第一扇區θ(1),若此時需要同時增加轉矩和磁鏈時,矢量選擇單元選擇電壓矢量U2(110);當定子磁鏈處于第二扇區θ(2)時,若此時需要增加轉矩并減小磁鏈時,矢量選擇單元選擇電壓矢量U1(100);當定子磁鏈處于第三扇區θ(3)時,若此時需要減小轉矩并增加磁鏈時,矢量選擇單元選擇電壓矢量U4(100),以此類推[5]。

圖1 磁鏈十二分區
2 六邊形磁鏈軌跡控制
六邊形磁鏈控制系統在1/6周期中只采用一種開關狀態,不需要實時計算磁鏈矢量的相角和幅值,只需要將定子靜止坐標系(αβ)下的磁鏈分量Ψsα和Ψsβ投影到三相坐標系(β)的βa,βb,βc軸上,得到三相定子磁鏈分量Ψβa,Ψβb,Ψβc,再通過滯環比較器得到3個磁鏈開關信號SΨa,SΨb,SΨc,由磁鏈開關信號可以很方便地得到逆變器開關信號Sa,Sb,Sc。另一方面,根據測得的定子電壓us和定子電流is,通過電磁轉矩計算得到實際電磁轉矩Te,將Te與給定電磁轉矩T*e比較之后經過轉矩滯環比較器得到轉矩開關信號TQ,由TQ控制逆變器開關信號的輸入,進而控制異步牽引電機。
3 恒轉矩區段全速度控制策略
綜合圓形磁鏈控制和六邊形磁鏈控制的優點,在低速范圍內,即15%基速以下,采用圓形磁鏈控制;在高速范圍內,即15%基速以上,采用六邊形磁鏈控制。磁鏈控制方式以15%基速為切換點,切換通過編寫的S函數來實現。根據直接轉矩控制理論,建立MATLAB/Simulink仿真模型。
4 全速度控制系統仿真與分析
本文參考的某動車組編組方式為四動四拖。通過MATLAB/Simulink仿真,得到的結果如圖2~圖5所示。

圖2 電機轉速n
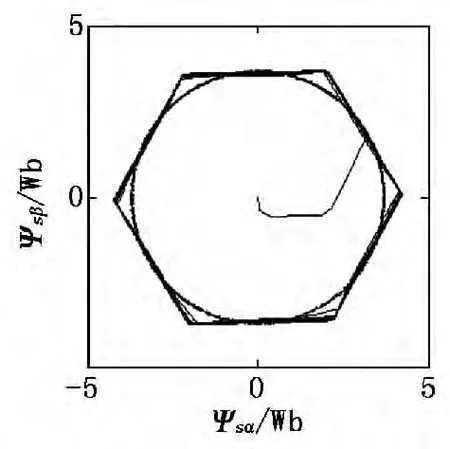
圖3 定子磁鏈軌跡

圖4 定子磁鏈Ψs
結合圖2、圖3和圖4可以看出:在全速范圍內,定子磁鏈軌跡呈圓形和六邊形混合圖形;在低速范圍內,磁鏈軌跡為圓形;在高速范圍內,磁鏈軌跡為六邊形;當牽引電機處于圓形磁鏈控制時,定子磁鏈的波動明顯小于六邊形控制。
在列車起動初始,起動阻力要大于列車運行阻力。從圖5中可以看出列車起動時電機負載轉矩約為290 Nm,并隨列車速度的增加而減小;在0.015s,此時列車阻力為列車運行阻力,并隨著列車速度的增加而增加。結合圖2可以看出,在電機負載轉矩變化的同時,轉速平穩過渡,并沒有出現大的波動,說明建立的系統動靜態性能響應良好。
為了對比傳統圓形磁鏈控制和十二扇區細分圓形磁鏈控制,單獨建立了兩種圓形磁鏈控制模型。牽引電機基本參數不變,初始給定電機轉速為40rad/s,0.3s給定電機轉速為80rad/s,0.6s給定電機轉速為30rad/s;電機負載轉矩初始給定值為0Nm,0.6s負載轉矩為400Nm。仿真結果如圖6、圖7所示。

圖5 電機負載轉矩Tl

圖6 兩種圓形磁鏈控制下的磁鏈軌跡

圖7 兩種圓形磁鏈控制下的電機電磁轉矩Te
對比圖6(a)和圖6(b)可以看出:在列車低速范圍內,傳統磁鏈控制會出現微小的磁鏈畸變;而采用十二扇區細分法得到的磁鏈軌跡能夠更快地達到圓形。對比圖7(a)和圖7(b)可以看出:傳統磁鏈控制電機電磁轉矩在±30Nm范圍內,而采用十二扇區細分法,電機電磁轉矩在±25Nm左右,這表明十二扇區細分法能夠有效地減小轉矩脈動。
5 結論
根據直接轉矩控制理論,基于某動車組參數,建立恒轉矩區段全速度控制模型,仿真結果表明:
(1)在考慮列車運行阻力和起動阻力的條件下,根據給定的參數,仿真得到的電機電磁轉矩和定子電流沒有產生大的波動,控制方式的切換比較平穩,定子磁鏈比較完整,沒有產生畸變,系統具有良好的動靜態響應性能。
(2)相對于傳統圓形磁鏈控制,采用十二扇區細分的方法能夠降低定子電阻壓降的影響,有效地減小磁鏈畸變和轉矩脈動,可用于異步牽引電機直接轉矩控制的深入研究。
[1]Depenbrock M. Direct self control of inverter-fed induction machines[J].IEEE Trans Power Electron,1988(3):420-429.
[2]馮曉云.交流傳動及其控制系統[M].北京:高等教育出版社,2009.
[3]李華德.交流調速控制系統[M].北京:電子工業出版社,2003.
[4]王英,常慧娟.異步電動機直接轉矩控制磁鏈區間細分方法[J].大連交通大學學報,2011,32(4):83-86.
[5]李正熙,楊立永.交直流調速系統[M].北京:電子工業出版社,2013.
