基于MEMS 陀螺的隨鉆測斜儀系統設計?
2015-12-31 12:11:30龍達峰
機械工程與自動化 2015年1期
關鍵詞:系統
龍達峰,蘇 文
(1.中北大學 儀器科學與動態測試教育部重點實驗室,山西 太原 030051;2.中國人民解放軍66011部隊,北京 102600)
0 引言
在礦井施工和石油鉆井中,需要實時準確地掌握鉆孔姿態、位置和軌跡等相關參數,以便工程作業人員能夠實時地掌握鉆孔作業中的工程地質情況,為工程作業人員及時調整作業方案,以避免盲目鉆孔而造成鉆孔事故的發生[1-3]。相比于傳統的電纜靜態測井方式,基于隨鉆測量方式帶來的極大便利,不僅可以減少鉆井測量的時間與成本,又能極大地提高測井精度[4]。目前,在國內各大油田、海上大型石油鉆井作業中,幾乎都采用隨鉆測井技術。但隨鉆測斜儀基本上都是從國外購買,其價格昂貴,且維修存在不便等問題[5]。本文基于MEMS(微電子機械系統)陀螺設計了隨鉆測斜儀系統,并利用仿真轉臺對所設計的隨鉆測斜儀系統進行了模擬隨鉆測井過程,以期望能夠研制成功具有完全自主知識產權的隨鉆測斜儀系統。
1 隨鉆測斜儀系統設計
1.1 隨鉆測斜儀系統總體方案
本文基于MEMS陀螺設計了隨鉆測斜儀系統總體方案,如圖1所示。該測斜儀系統包括井下隨鉆測試儀器和地面監控系統兩部分,并采用由鉆桿與地層構成的信號傳輸通道進行地面儀器和井下儀器的通信。其中,井下隨鉆傳感器包括三軸MEMS陀螺、三軸加速度計和溫度與壓力傳感器。井下儀器主要完成傾斜角、方位角和工具面角等各種參數的測量,并進行實時數據存儲,或者通過通信信道把測量數據傳回地面進行實時監控。地面監控系統接收井下傳上來的信息,進行數據處理、計算,并實時顯示鉆孔姿態、位置和軌跡等相關參數,以便地面作業人員能夠實時準確地掌握鉆孔作業情況,避免鉆孔施工的盲目性。
1.2 隨鉆測斜儀系統功能模塊設計
隨鉆測斜儀系統主要由信號調理電路、多通道數據采集模塊、數據存儲模塊和電源模塊等組成。
1.2.1 多通道數據采集模塊
多通道數據采集模塊是將調理后的隨鉆傳感器信號轉化為數字量。由于測斜儀井下傳感器包括三軸MEMS陀螺、三軸加速度計以及溫度與壓力多路信號,因此,采用兩片同步采集模數轉換器ADS8365實現12路信號的數據采集;選用Xilinx的XC2S50-TQ144C型FPGA作為數據采集模塊的控制芯片。數據采集電路模塊如圖2所示。其中,SC1~SC6為6個傳感器模擬信號通道輸入端,DB0~DB15為模數轉換數據輸出端。FPGA除了完成數據采集模塊的控制外,還要完成井下隨鉆儀器的數據存儲、通信模塊和外圍接口電路的功能。
1.2.2 數據存儲模塊
井下隨鉆儀器采用三星K9F2G08型Flash芯片作為隨鉆測斜儀數據存儲芯片,該芯片具有2Gb的存儲容量,由FPGA內的控制器實現Flash芯片控制。數據存儲電路模塊如圖3所示。
1.2.3 FPGA的配置電路
采用XCF01SV020芯片作為FPGA的可編程配置芯片,FPGA配置電路模塊如圖4所示。
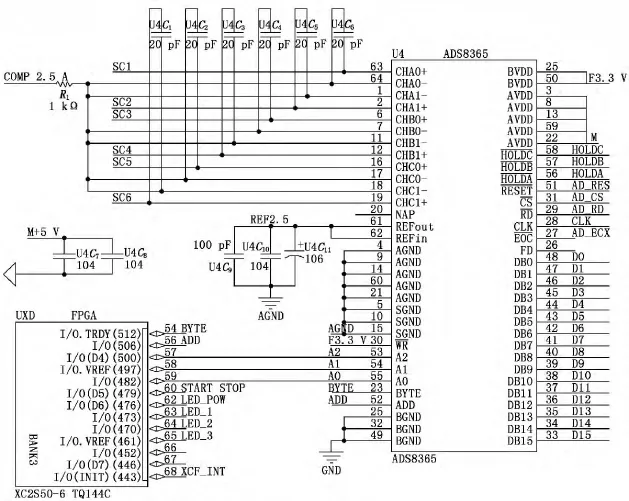
圖2 數據采集電路模塊
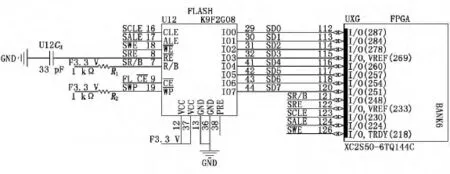
圖3 數據存儲電路模塊
1.2.4 電源模塊
系統中的FPGA、ADS8365和其他芯片等的工作電壓主要有5V、3.3V和2.5V。由于隨鉆測斜儀系統需要采用外接7.4V電源作為供電電源,因此,需要設計以上3個輸出分壓電源輸出模塊。時鐘電路模塊如圖5所示。由圖5可知,7.4V外電源經由REG104-5穩壓芯片轉換成5V電壓輸出,然后再把+5V電壓輸出經由MAX8882EUTAQ芯片分別轉換成2.5V和3.3V兩路電壓輸出。
2 隨鉆測斜儀系統姿態算法設計
隨鉆測斜儀系統利用捷聯安裝于鉆桿的三軸加速度計和三軸MEMS陀螺儀分別測量出鉆桿的比力信息(f~b)和角速度信息(?ωbib),然后根據捷聯慣性原理實時完成鉆桿的姿態與位置的解,其隨鉆測斜儀系統算法原理如圖6所示。
隨鉆測斜儀系統選取北東地地理坐標系為參考坐標系,得到的姿態矩陣變換關系為[6]:

其中:ψ,θ,γ分別為隨鉆測斜儀方位角、俯仰角、橫滾角。
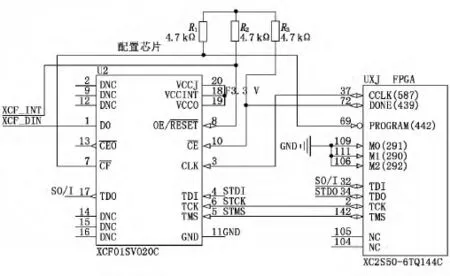
圖4 FPGA配置電路模塊
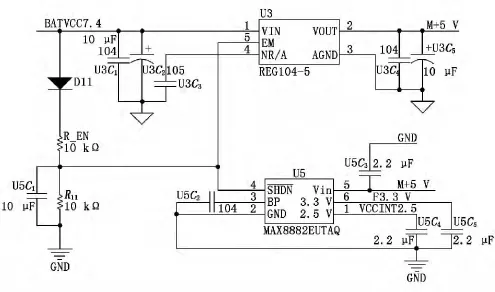
圖5 時鐘電路模塊
如前所述,利用加速度計和陀螺實時測量信息,根據圖6所示的算法原理進行姿態更新矩陣的計算。更新所得姿態矩陣Cnb為:
其中:C11,C12,C13,C21,C22,C23,C31,C32,C33分別為式(1)中對應各項。對比式(1)和式(2)關系可知,鉆井姿態的提取公式為:
3 仿真實驗測試
為了驗證所設計的隨鉆測斜儀系統性能,在三軸仿真轉臺上模擬實際隨鉆測井過程,通過控制轉臺的姿態變化來模擬實際的隨鉆測井過程,三軸陀螺角速率測量輸出如圖7所示。
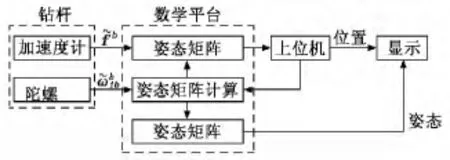
圖6 隨鉆測斜儀系統算法原理
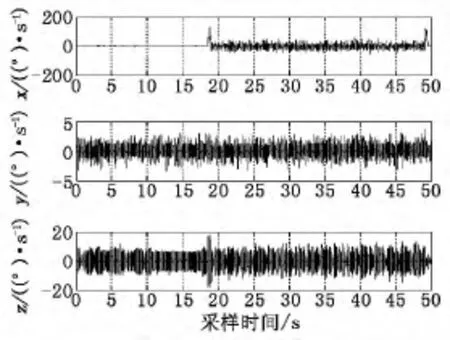
圖7 三軸陀螺角速率測量輸出
模擬600m井深測井解算后的鉆孔軌跡如圖8所示。從仿真測井結果來看,隨鉆測斜儀具有比較高的測量精度。
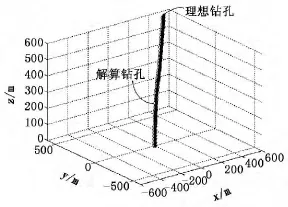
圖8 解算后鉆孔軌跡
4 結論
本文重點介紹了隨鉆測斜系統的各功能模塊的硬件設計方法,并利用高精度三軸仿真轉臺搭建隨鉆測井的半物理仿真平臺,在該平臺上開展了實際隨鉆模擬測井過程。結果表明,所設計的隨鉆陀螺測斜儀系統具有較高的測量精度。
[1]杜俊杰,范業活,韓永國.國內EM-MWD技術發展現狀及在煤層氣中的應用展望[J].中國煤層氣,2014(4):6-10.
[2]劉禹銘,蔡玉貴.機械式無線隨鉆直井測斜儀在海上油田的應用[J].石油機械,2014(8):75-78.
[3]龍達峰,劉俊,張曉明.陀螺測斜儀小角度井斜角測量的姿態提取方法[J].傳感技術學,2013(6):883-886.
[4]張辛耘,王敬農,郭彥軍.隨鉆測井技術進展和發展趨勢[J].測井技術,2006,30(1):10-13.
[5]石元會,胡曉明.DS39型陀螺測斜儀及其在坪北油田開發中的應用[J].國外測井技術,2006,21(4):26-30.
[6]秦永元.慣性導航[M].北京:科學出版社,2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
