基于51單片機的盲文助讀器系統設計?
2015-12-31 12:11:28李錦明李文景陳紅梅
機械工程與自動化 2015年1期
李錦明,李文景,陳紅梅,駢 根
(哈爾濱理工大學 榮成學院,山東 威海 264300)
0 引言
中國是全世界盲人最多的國家之一,據統計約有900萬盲人[1]。盲人接受文字信息的途徑主要有利用語音合成發聲軟件閱讀和觸摸盲文凸字兩種形式。語音合成發聲感情生硬,缺乏閱讀快感,較晦澀的文字和公式更是難以理解記憶。同時,供盲人閱讀的新版圖書只有104種,盲文期刊僅8種,品種數量可謂奇缺[2]。另一方面,現有的盲文助讀器由于采用壓電陶瓷,其價格也頗為昂貴。本文基于51單片機設計了一種新型的盲文助讀器。
1 新型盲文助讀器的總體架構設計
目前廣泛應用的盲文有現行盲文和雙拼盲文兩種,現行盲文以三行兩列的6個凸點為一個基本單位,6個凸點之間通過不同的排列組合形成不同的文字,本文基于流行最廣的現行盲文設計了一種8方的盲文助讀器。因微型步進電機具有體積小、利于控制、價格低廉等優點,機械部分采用步進電機來實現凸點的起落,控制部分則采用STC89C51單片機,通過6個LB1848M步進電機驅動芯片來控制6個步進電機,每個步進電機控制1個凸點的起降,每6個步進電機控制的凸點表示1個盲文單元(即盲文的1方),每個盲文單元可以顯示1個阿拉伯數字或英文字母,2個或3個單元可以顯示1個漢字。電路連接部分采用自行設計的PCB板,將電機驅動芯片、步進電機、單片機有序地連接。單片機通過內部程序控制來實現盲文單元內6個步進電機間以及每個盲文單元間的協調組合,從而實現盲文的表達輸出。新型盲文助讀器的總體框架如圖1所示。
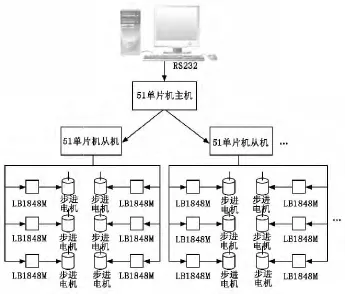
圖1 新型盲文助讀器的總體框架
2 機械整體架構
采用微型步進電機作為原動機(即控制終端),通過單片機發送的信號控制電機的旋轉,帶動螺旋機構控制螺母和凸點的升降運動。將微型步進電機鑲嵌在底盤內,焊接在PCB板上,利用導軌板壁和與之配合的電機限制螺母沿x,y,z軸平動和繞x,y軸轉動,使之只能繞z軸轉動從而實現沿導軌板壁的上下移動,每6個凸點為1個單元,通過不同凸點的起降變化,顯示不同的文字。盲文助讀器的機械整體構架如圖2所示。
步進電機是四線二項混合式(Hybrid Stepping,HS)微型步進電機,此款電機屬于二相四拍式步進電機。通過LB1848M芯片產生的驅動信號驅動步進電機,帶動絲軸上的螺母上下運動,距離控制在2mm的統一高度。步進電機結構示意圖如圖3所示。
3 控制部分設計
3.1 多機通訊的硬件設計
PC機作為上位機,主機和從機都為51單片機。PC機與主機通過串口通訊。由于通訊距離較短,所以本項目采用RS232進行串口通訊,波特率為9 600b/s,數據位為8位。
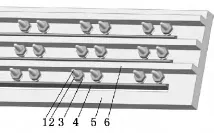
圖2 盲文助讀器的機械整體構架

圖3 步進電機結構示意圖
主機利用緩沖寄存器SBUF接收PC機發來的字符數據后經過內部轉碼處理,將字符數據翻譯為對應的電機控制碼,通過串行通訊發送給從機。從機接收完主機發來的數據后,實時控制相應步進電機的轉動狀態。主、從機通訊的電路節點設計見圖4,其中從機部分只顯示出了一個單片機和1個電機。
PCB板的設計是本項目硬件系統的重要部分,使用Protel DXP2004,實現了SCH(原理圖)設計、SCH仿真、PCB(印制電路板)設計、Auto Router(自動布線器)和FPGA設計。
在PCB的制作過程中,芯片LB1848M的封裝根據技術手冊完成。為了減小盲人助讀器的整體尺寸并且配合微型步進電機的焊接,實際制作時,采用兩層PCB板作為信號層,其主要的工藝指標如下:PCB板寬為24mil;最小線寬為6mil;走線與焊盤的最小距離為12mil;過孔最小內徑為16mil。
3.2 多機通訊的軟件設計
通過對51單片機內部的多機通訊控制位SM2、SM1的控制實現多機通訊。多機通訊流程圖如圖5所示。
利用串行通訊來實現主機與從機間的通訊,主機先利用串口向所有從機發送地址,在從機接收到地址時進行判斷。若地址不符則不作為,地址相符則繼續接收主機發來的電機控制信息,進而對電機進行控制以實現盲文的顯示。
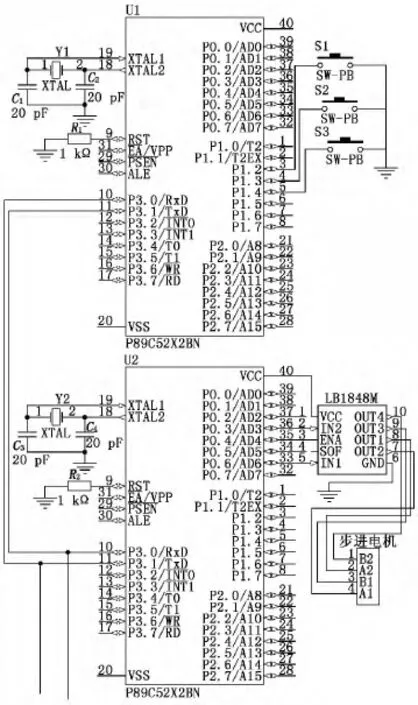
圖4 主、從機通訊的電路節點設計
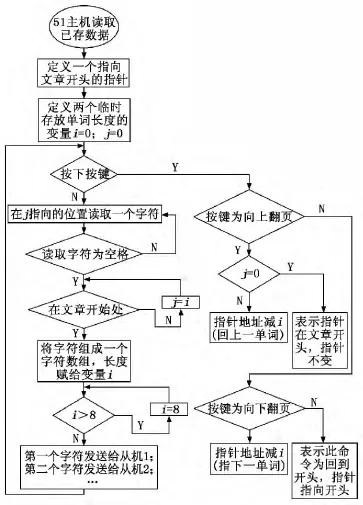
圖5 多機通訊流程圖
在進行多機通訊時,主機依次對從機進行控制,實現8組步進電機的依次控制,先控制第1個從機,令電機顯示第1個盲文,再控制第2個從機,令電機顯示第2個盲文,……
在8組從機依次控制完畢后將所有從機的控制位SM2、SM1恢復為初始狀態,準備進行下一次通訊命令的接收。
4 結論
本文從我國盲文使用現狀入手,指出了現有語音合成發聲軟件和紙質書籍的弊端,并詳細介紹了新型盲文助讀器的具體設計原理。利用微型步進電機控制凸點,用單片機控制電機,通過PCB進行電路搭建,實現了新型盲文助讀器的設計。它能很方便地將電子版文字轉化為盲文凸起形式,價格低廉,對盲人的學習、生活有很大的幫助。
[1]張映娣,張小慰.誰來關注盲人的閱讀需求[J].出版參考,2005(36):7.
[2]李然,武俊峰.電動公交客車CAN總線網絡通信結構的設計[J].哈爾濱理工大學學報,2012,17(1):68-72.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
