靶彈飛行安全控制器設計
2015-12-31 11:48:04葉厚良諶國森
上海航天 2015年3期
葉厚良,諶國森,張 明
(中國人民解放軍92941部隊,遼寧 葫蘆島 125001)
0 引言
在組織艦載防空武器系統試驗時,需要為其提供能逼真模擬敵方來襲反艦導彈的靶彈,以檢驗艦載防空武器系統的反導能力。靶彈通常由接近退役的反艦導彈改裝而成,其飛行控制的可靠性出現不同程度下降,參試時有一定風險。隨著反艦導彈向大射程、高速度、低空掠海飛行、大入射角俯沖等方向發展,靶彈暴露的安全問題日益突出。因此,在地面技術準備過程中,需對靶彈進行反復的嚴格技術檢測,以便及時發現并處理存在的安全隱患和故障,確保靶彈性能可靠。但地面技術準備再充分,靶彈在供靶飛行過程中仍可能發生無法控制的情況[1]。一旦靶彈在飛行過程中出現故障或未被成功攔截,可能會誤中參試艦船,威脅參試人員安全。尤其在組織小航捷試驗時,靶彈的射向與參試艦艇的距離很近,該類事故發生的概率很高。同時,試驗航區周邊海域布滿了重要的工業目標和民用設施,為保護這些目標,需預先劃定導彈飛行航區,將試驗區域限制在一定范圍[2]。若靶彈飛行失控,飛出并墜毀到試驗航區外,則會造成不可估量的損失。安全控制成為靶彈供靶飛行首要解決和保障的問題。
在以往的試驗組織過程中,為確保供靶安全,常在靶彈上加裝被動安控設備,用彈上遙測系統實時回傳的靶彈位置等狀態信息,由地面判斷靶彈飛行是否正常[3]。如判斷靶彈位置靠近參試艦船,通過遙測系統向靶彈發出規避爬高命令,由靶彈飛行控制系統控制靶彈爬高飛行,規避參試艦船;如判斷靶彈飛出試驗航區,通過遙測系統向靶彈發出安全自毀控制命令,由靶彈飛行控制系統控制靶彈入水,完成自毀操作。這種安控策略的不足有:需在彈上加裝遙測信號發射系統,地面配置遙測接收和控制裝置,同時配備地面分析和決策系統,設備造價昂貴、硬件成本高;采用人工判斷決策,對安控指揮人員的能力水平和實踐經驗要求較高;靶彈飛行控制系統的可靠性不能得到完全保證。美國等在組織靶彈供靶試驗時,一般在彈上加裝獨立于靶彈飛行控制系統的靶彈自主安控設備,通過GPS系統實時定位靶彈的位置信息,靶彈自主安控設備根據GPS等數據實時分析判斷靶彈狀態,從而完成靶彈的規避和自毀控制操作,該法簡單易行,可靠性高[4]。采用這種安控策略,面臨的一個問題是GPS信息易受外部信號干擾。為提高靶彈供靶可靠性,確保試驗安全,本文對一種基于GPS接收機、獨立于靶彈飛行控制系統的靶彈安控器設計進行了研究。
1 安控器組成與功能模塊設計
根據標準化、模塊化、開放性原則,設計了基于PC104的靶彈安控器。其硬件平臺主要包括主控計算機、多功能信號采集器、信號調理電路、電源模塊、GPS接收機及天線、數傳電臺等部分。系統功能模塊主要由程序裝訂、數據裝訂、與GPS接收機數據通信、安控地面仿真測試、與靶彈控制系統通信、彈上設備信息采集下傳等組成。
1.1硬件組成
硬件系統的組成和信號傳遞如圖1所示。
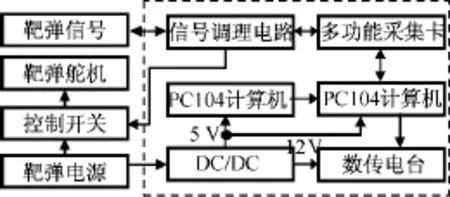
圖1 靶彈安控器硬件組成Fig.1 Structure of the target missile safe controller
1.1.1 主控計算機
采用PC104,選用深圳盛博公司SCM-6241B,屬于工業級寬溫產品,CPU為80486,主頻為100MHz,16M在板RAM,串口6個,并口1個,16M電子磁盤。主控計算機可根據靶彈工作時序實現系統硬件平臺的配置管理和數據解算等功能。
1.1.2 多功能采集器
采用盛博公司的ADT652信號采集卡,有16單端/8差分輸入,12位分辨率,A/D采樣率最大為100kHz,24路I/O,82C54可編程定時器。采集板卡為全系列通用訪問模式,極大提高了板卡應用靈活性和便利性,具較強的板卡擴展及軟件支持功能。
1.1.3 信號調理電路
根據靶彈上的信號采集要求和工作時序自行設計,是硬件平臺的關鍵模塊,包括電壓轉換、光電隔離(開關量)和信號驅動三部分,以滿足A/D轉換和開關量的輸入/輸出要求;同時實現電路上的隔離,防止干擾進入。
1.1.4 電源模塊
采用兩級式變換器的參數設計,用電路解耦法改善直流變換器的電磁兼容性。電源分兩組DC/DC變換,將從靶彈上輸入的直流電分別變換為5,12V,供計算機、GPS接收機和數傳電臺使用。兩組電源模塊均為軍品級,以保證質量。
1.1.5 GPS接收機
選用NOVATEL公司OEM-2接收機,+5V供電,通過串口與計算機通信,可設置工作模式、通信參數和導航電文格式等信息。
1.1.6 數傳電臺
選用MDS4710,由電源模塊轉換的12V電壓為其供電。該電臺采用DSP技術,抗干擾性能好,接收靈敏度高,傳輸速度快,在惡劣條件下能可靠通信。其專用工具軟件方便安裝調試和維護使用。
1.2 功能模塊
1.2.1 程序裝訂
將主控計算機上的程序裝訂串行口與編譯程序的設備相連,實現數據采集、解算、輸出及安控指令輸出、執行程序的裝訂與更新。
1.2.2 數據裝訂
將主控計算機上的數據裝訂串行口與地面測試設備連接,可接收地面測試軟件中數據裝訂模塊發送的安控區域經緯度數據,并按一定格式存儲在系統的EEPROM中。
1.2.3 安控仿真測試
將主控計算機上的安控仿真串行口與地面測試設備相連,可對裝訂的安控區域進行仿真測試,也可實時監測GPS的輸出信息和安控器的執行情況。
1.2.4 靶彈控制系統通信
連接靶彈控制系統與安控器通過串口,安控器可實時接收靶彈飛控系統輸出的偏航等信息,作為安控備份數據。
1.2.5 GPS數據通信
主控計算機可實現GPS數據的接收、數據解算、數據輸出及安控命令的輸出與執行等功能。GPS OEM板可為安控器提供經度、緯度、高度、東/北/天向速度等數據信息。
1.2.6 彈上設備信息采集下傳
通過多功能數據采集卡采集靶彈的模擬、開關信號,編碼處理后可通過數傳電臺下傳至地面接收設備。
2 安控執行策略與軟件流程設計
2.1 安控執行策略
為保護參試艦艇等重要目標并防止靶彈飛出試驗航區,根據任務區域、地理環境和航路要求,需預先設定靶彈安控警戒和規避爬高的區域,并按一定算法向安控器內注入安控警戒線、安控必炸線和規避爬高線的數據,如圖2所示[5]。這些參數是執行安控策略的重要依據。
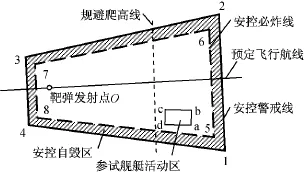
圖2 安控概念Fig.2 Conceptions of flight safety controlling
2.1.1 安控警戒線
安控警戒線內部分是組織靶彈飛行試驗的區域,即試驗危險區,該區域為多邊形,一般為四邊形。靶彈飛行前需向彈上裝訂安控警戒線數據,包括四邊形4個頂點的序號和經緯度坐標。設定頂點序號從1開始按逆時針方向排序。
2.1.2 安控必炸線(安控管道)
裝訂安控警戒線數據后,安控器自動沿警戒線內縮10km(該數值可調)生成一條封閉的安控必炸線,用于安控器發出安控自毀指令并可靠執行。生成的數據包括頂點的序號和經緯度坐標。頂點序號按逆時針方向排序。
2.1.3 規避爬高線
將參試艦艇活動的區域投影到靶彈預定飛行航線上,沿靶彈預定飛行航線距離該投影前端10km(該數值可調)處生成一條垂直線,沿此垂直線往靶彈飛行方向的區域為規避區。安控器在靶彈到達規避線時發出爬高指令,控制靶彈爬高以規避參試艦艇。
2.1.4 飛行航區
靶彈正常狀態下的飛行區域,由安控必炸線圍成,即安控管道內區域。
2.1.5 安控自毀區
靶彈執行安控自毀指令后,可能墜落地散布點形成的帶狀區域,由安控警戒線和安控必炸線圍成(圖中陰影區域)。
2.2 軟件流程
主控計算機選用DOS操作系統為平臺,用Turbo C++3.1設計控制應用軟件。軟件系統主要由初始化模塊、采集模塊、信息處理模塊、信息編碼發送模塊、通信模塊和中斷模塊等組成,加電后自動運行。軟件主程序流程如圖3所示。
靶彈通電后,安控器讀取預先裝訂的安控參數,完成變量和硬件的初始化。靶彈發射后在空中飛行時,安控器實時采集彈上有關信號,并分析判斷:先判斷GPS接收機實時輸出的位置信息是否有效、有無受到干擾[6]。若GPS信號正常,則優先采用GPS數據;若安控器判斷GPS接收機實時輸出的位置信息無效、受到強烈干擾,則采用彈上飛行控制系統解算出的偏航信息。安控器對GPS或飛控偏航數據進行解算、編碼和處理,實時判定靶彈是否處于安控區或規避區。一旦判定靶彈飛行進入規避區或超出安控管道,則根據安控實施判別準則,完成靶彈對參試艦艇的規避或超安全區自毀,實現靶彈的安全可控飛行:當靶彈飛入規避區時,安控器發出規避指令,控制靶彈舵機動作使靶彈爬高,以規避參試艦艇;如靶彈飛出安控管道,安控器立即輸出自毀指令,斷開靶彈上的舵機供電線路,使靶彈迅速墜毀在安控自毀區域內[7]。在此過程中,靶彈安控器與地面系統間保持信息聯絡,能實時將靶彈上主要設備的狀態信息和位置信息傳送至地面設備,便于地面掌握靶彈工作狀態。
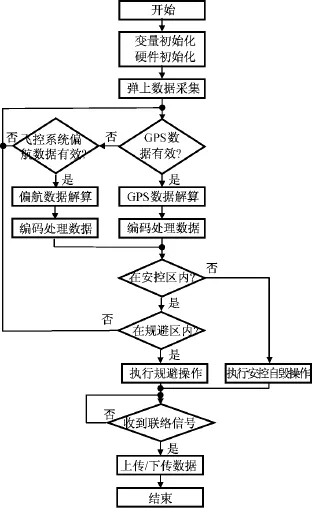
圖3 軟件主程序流程Fig.3 Flowchart of main software
3 關鍵技術
3.1 靶彈相關數據采集與處理
因彈上電磁干擾嚴重,安控器在采集彈上相關信號特別是模擬信號時,易受各類噪聲干擾,采集的數據可能存在失真,造成信息誤判[8]。為解決該問題,按以下規定采集處理數據。
a)程序設定每100ms采集1組數據,每次連續采集50組,去除最大、最小值,剩下的48組數據作算術平均,并將此平均值作為I/O部分信號的1次采集數值,由此保證采集數據的準確性。
b)對采集時間控制,使用計算機內部時鐘計時。計算機內部時鐘一般每55ms計時1次,為此修改了其定時間隔,將55ms改為50ms,保證采集時間間隔準確,不會出現時間誤差累積[9]。
3.2 安控實施判別準則
靶彈在發射、飛行過程中,彈上電磁環境、力學環境非常復雜,GPS信號在傳輸中易受干擾出現誤碼,同時靶彈飛控系統輸出的角度偏航信號也可能瞬時超過門限值[10]。因此,即使靶彈正常飛行,未飛出安控管道,安控器也可能會出現誤判。對此,制定以下安控實施判別準則。
a)程序中設計了用于檢查靶彈是否出現角度偏航或飛出安控管道的動態滑動窗口。為判斷GPS數據是否進入規避區或超出安控管道,設計采用窗口寬度為5、門限為3的動態滑動窗口,即連續采集數據5次,若有3次以上數據出現超界,則判為區域超界;為判斷角度偏航,采用窗口寬度為100、門限為80的動態滑動窗口,即連續采集數據100次,若有80次或大于80次偏航,則確認為靶彈偏航。
b)設定GPS信號正常時,以GPS數據為主,此時即使靶彈偏航,只要GPS數據未飛出安控管道,就不發自毀指令;GPS信號不正常時,以偏航數據為準,只要連續3次動態滑動窗口給出偏航信號,立即發出自毀指令。
4 可靠性仿真與分析
對安控器進行了多次地面仿真測試,以檢驗安控器的工作可靠性。仿真試驗工作原理如圖4所示。
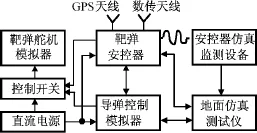
圖4 安控仿真試驗原理Fig.4 Principle of simulation test
試驗前由地面仿真測試儀將安控參數,如安控警戒線多邊形每個頂點的經緯度和頂點順序號等,通過裝訂到靶彈安控器。模擬靶彈在空中飛行可能遇到的各種條件及其相應的工作狀態,地面仿真測試儀實時將有關數據傳輸至安控器,檢測安控器是否依據安控策略有效控制靶彈舵機模擬器動作,同時通過仿真監測設備實時監控安控器的工作狀態及其與地面的傳輸數據是否正常。仿真結果表明:設計的安控器工作可靠,當靶彈處于安控管道(其中管道數據為虛擬數據,僅作參考)內時,不執行安控;若飛入規避區,則執行爬高指令(仿真結果如圖5所示);若飛出安控必炸線,則執行安控自毀指令(仿真結果如圖6所示)。

圖5 仿真測試結果(進規避區)Fig.5 Result of simulation test 1
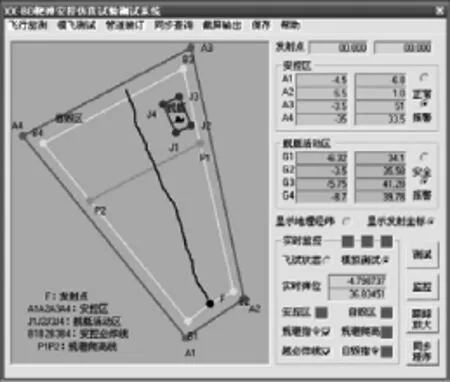
圖6 仿真測試結果(出安控區)Fig.6 Result of the simulation test 2
5 結束語
本文通過在靶彈上加裝高可靠性、基于GPS接收機、獨立于靶彈飛行控制系統的彈載安控設備,實現了靶彈規避參試艦艇、在飛行控制故障或未被成功攔截的情況下墜毀到預定安全區域的目的,并利用靶彈控制系統的速度、偏航等信息作為備份,增加了安全余度,保證了靶彈在試驗供靶過程中的安全可靠。靶彈安控器集信號采集、彈道測量、安全控制、信號傳輸功能于一體,不僅能執行靶彈安控策略而且可實時將靶彈上主要設備的狀態信息和位置信息發送給地面設備,便于監測靶彈工作狀態。該系統在靶場得到多次成功應用,圓滿完成了多型試驗的供靶保障任務,發揮了重要作用。
將靶彈飛行控制系統輸出的偏航信息(當靶彈偏離正常射向時,超過預裝訂角度即判定為角度偏航)作為備份,增加了安全余度,避免了當GPS信號受到干擾時靶彈安控器誤操控現象的發生。
[1] 文仲輝.戰術導彈系統分析[M].北京:國防工業出版社,2000.
[2] 楊榜林.軍事裝備試驗學[M].北京:國防工業出版社,2002.
[3] 曲寶忠,孫曉峰.海軍戰術導彈試驗與鑒定[M].北京:國防工業出版社,2005.
[4] Jr EICHBLATT E J.Test and evaluation of the tactical missle[M].New York:Marcel Dekker Inc,1989.
[5] 薛艷峰,肖前貴,叢書全.無人機飛行安全控制與安控器設計[J].宇航計測技術,2012,32(6):30-34.
[6] 劉基余.GPS衛星導航與定位原理[M].北京:科學出版社,2008.
[7] 文傳源.現代飛行控制[M].北京:北京航空航天大學出版社,2004.
[8] 凱瑟B E.航空和航天系統的電磁干擾控制[M].喻顯榮,李玉蘭(譯).北京:宇航出版社,1989:22-23.
[9] 焦 鵬,游澤成,楊宇飛.計算機內部時鐘穩定性實驗及分析[J].測試技術學報,2011,20(1):22-25.
[10] 劉述民,張勇強,王全順,等.飛行控制裝備電磁干擾機理及防護研究[J].裝備環境工程,2013(6):17-20.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32