火箭發動機雙向搖擺機構運動學研究
2015-12-31 11:48:16錢昌年傅俊勇朱康武
上海航天 2015年3期
關鍵詞:發動機
錢昌年,傅俊勇,張 亮,朱康武
(上海航天控制技術研究所,上海 200233)
0 引言
火箭發動機搖擺機構是火箭控制系統的執行機構,其作用是響應控制系統的指令,通過調整發動機姿態改變發動機推力方向,從而實現調整箭體的姿態。雙向搖擺火箭發動機采用2臺伺服機構進行擺動控制,實質上構成了一種空間二自由度并聯機構。根據伺服機構的伸縮位移求取發動機的空間姿態是火箭姿態控制設計的必要環節,傳統采用近似線性化方法處理[1]。某新型雙向搖擺發動機由于伺服機構支點與搖擺點不在一個平面內,采用傳統方法設計忽略了火箭發動機擺角的正負不對稱性和俯仰擺角與偏航擺角的互相干擾,存在較大的誤差,需從并聯機構的角度考慮火箭發動機擺角解析解求取問題。并聯機構運動學正向求解指在已知機構輸入關節的條件下求解機構末端的位置和姿態,反向求解指在已知機構末端位置和姿態的條件下求解機構的輸入關節變量。因并聯機構的正向運動學方程具高階非線性特點,求解過程非常復雜[2]。一般,并聯機構的運動學正向求解遠難于反向求解,正解多采用數值解法[3]。本文對新一代運載火箭發動機雙向搖擺機構運動學進行了研究。
1 系統描述
新一代運載火箭并聯雙向搖擺機構主要由發動機,電液伺服機構A、B,動支架,常平架(與箭體固連)等組成,如圖1所示。常平架與動支架以及動支架與發動機間分別由兩個互相垂直的鉸鏈連接,兩個鉸鏈關節的軸線相交于點O,發動機能繞旋轉中心O作自由度定點轉動。發動機搖擺運動由2臺電液伺服機構驅動,其上下支點分別通過球鉸鏈與發動機噴管和常平架連接。伺服機構與發動機的鉸接點分別為A,B;伺服機構與常平架的鉸接點分別表示為OA,OB;平面OAOA垂直于平面OBOB。
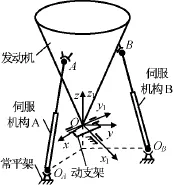
圖1 發動機并聯雙搖擺機構(初始姿態)Fig.1 Parallel two-way swiveling mechanism of launcher engine(initial configuration)
為描述發動機姿態,定義以下坐標系。
a)坐標系O-xyz:固連于常平架,xOy平面與水平面平行,Ox軸位于平面OAOA;Oy軸位于平面OBOB。分別定義發動機繞Ox,Oy軸的轉角為俯仰角和偏航角,發動機姿態控制算法設計中主要考慮這兩者。
b)坐標系O-x1y1z1:固連于常平架,由O-xyz系繞Oz軸逆時針旋轉45°而得,Ox1軸為連接動支架和常平架的鉸鏈軸線;Oy1軸為連接發動機和動支架的鉸鏈軸線。
c)坐標系O-x2y2z2:固連于動支架。
d)坐標系O-x3y3z3:固連于發動機噴管。
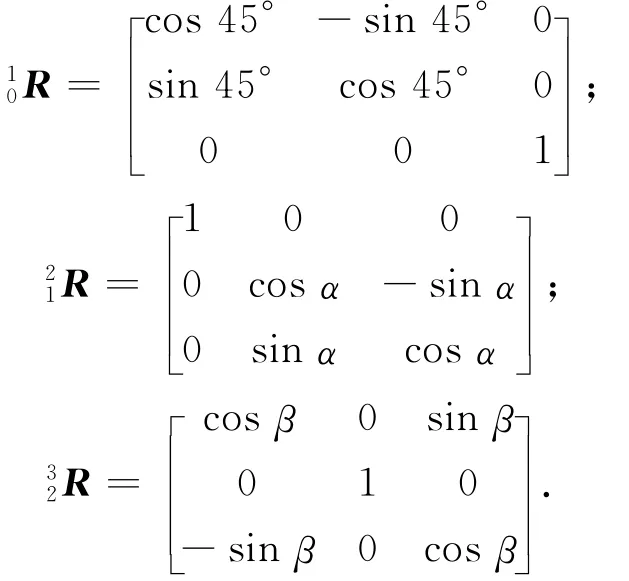
發動機在任意時刻的姿態可描述為:O-x3y3z3系和O-x2y2z2系在零位姿態與O-x1y1z1系重合,發動機連體坐標系先繞Ox1軸轉動α,再繞Oy2軸轉動β,如圖2所示。如已知發動機兩個鉸鏈轉角α,β,就可通過轉換得到發動機的俯仰角和偏航角(即發動機繞Ox,Oy軸的轉角)。
用旋轉矩陣表示坐標系間的相對方位[4]。O-x3y3z3系相對O-xyz系的方位可表示為

式中:

圖2 發動機姿態Fig.2 Description for configuration of engine
展開式(1),可得


式中:nA,nB分別為n′A,n′B在O-xyz系中的表示。在O-xyz系中定義矢量
2 運動學正解
將兩臺伺服機構作動筒的伸縮量ΔlA,ΔlB分別作為發動機并聯雙搖擺機構的兩個主動輸入,發動機的兩個鉸鏈轉角α,β為發動機搖擺機構的輸出(或是發動機俯仰角和偏航角)。發動機雙搖擺機構的運動學正解是已知ΔlA,ΔlB求發動機轉角α,β。因現有火箭發動機不具備轉角傳感器,發動機的姿態只能由伺服機構作動筒的伸縮量求得,故有必要求解搖擺機構正向運動學問題。
在O-xyz系中,存在關系

式中:|IA|2=(lA0+ΔlA)2;|IB|2=(lB0+ΔlB)2。此處:lA0,lB0分別為已知的兩臺伺服機構的初始長度。當給定輸入ΔlA,ΔlB時,式(9)、(10)左邊為已知量,此即火箭發動機并聯雙搖擺機構的運動約束方程。將式(2)~(8)代入式(9)、(10)并展開,可得關于α,β的一組方程
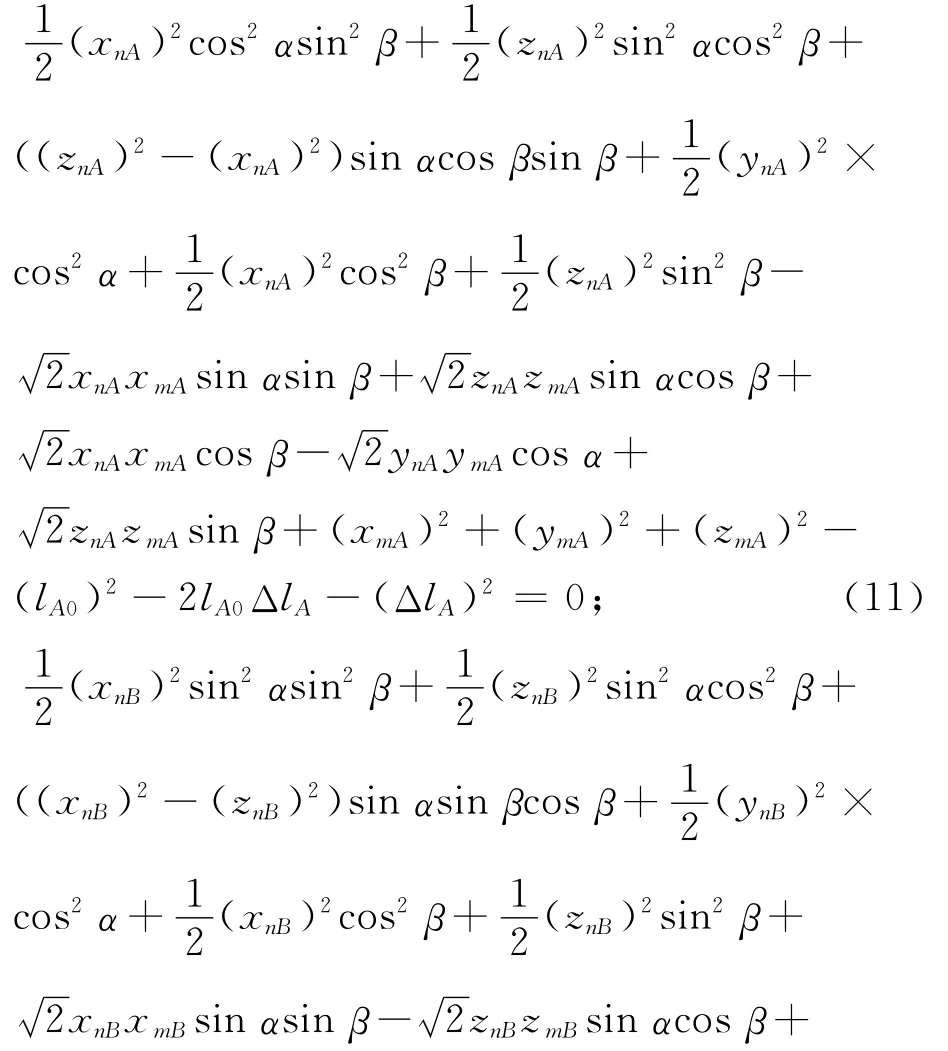
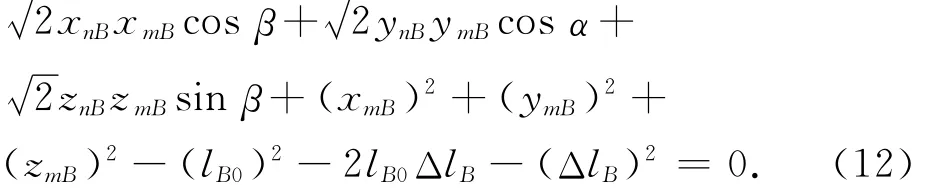
式(11)、(12)中只有α,β是未知量,其他參數均為結構已知參數。式(11)、(12)是關于α,β超越方程,為便于求解,將半角公式
代入式(11)、(12),整理后得

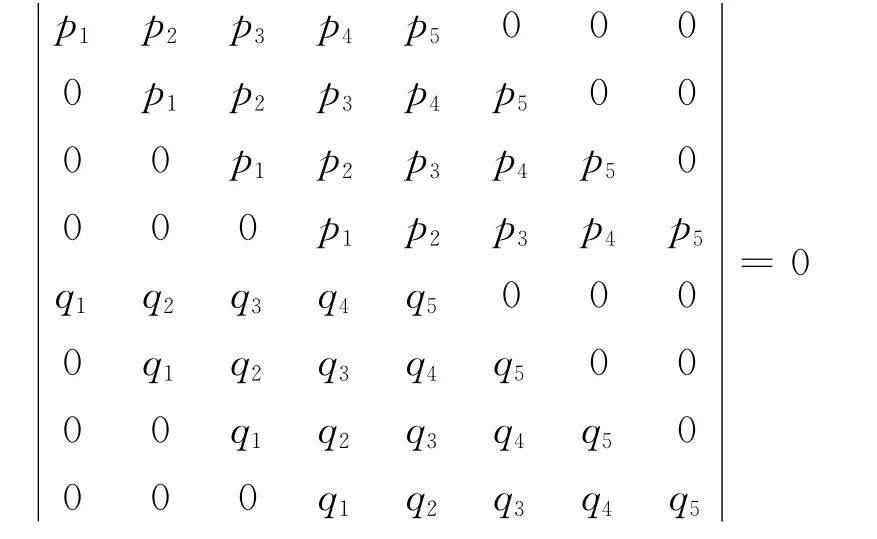
成立[5]。化簡后可得關于a的16次方程

式中:k1,k2,…,k17為已知參數的表達式。
用上述方法消去未知量b,將一組二元高次方程組轉為一元高次方程組,求解方程(15)可得a的16個解。此即求解高次方程的Sylvester消元法,但求解過程中需剔除引入的無效解。
式(15)是式(13)、(14)存在共同解的必要條件,并非所有a的實數解都能使式(13)、(14)同時成立。分別將a的實數解代入式(13)、(14),每個a的實數解都能由式(13)、(14)解出兩組b的解(每組4個),若兩組b的解中有相等的,則說明當前a為有效解,否則舍去。根據發動機并聯雙搖擺機構結構特點,如不考慮運動范圍,對每一組輸入 {ΔlA,ΔlB},發動機均有兩個姿態滿足約束條件(發動機噴管朝上或朝下),故對一組輸入 {ΔlA,ΔlB},均能由式(13)~(15)確定兩組有效的{a,b},對每個a或b的實數解,都能在[0°,360°]唯一確定α=2arctana,β=2arctanb,即可由兩組{a,b}確定兩組{α,β}。實際發動機只限定在噴管朝上(圖1為發動機實驗環境,實際發動機噴管朝下)的范圍內運動,且發動機在運行過程中α,β∈(-10°,10°),由這些條件可在一系列求解結果中篩選出唯一解。在求解唯一解時,先判定解的有效性,再判斷解是否處于運動范圍內,也可調換兩個過程的順序,能有效減少求解高次方程的次數。
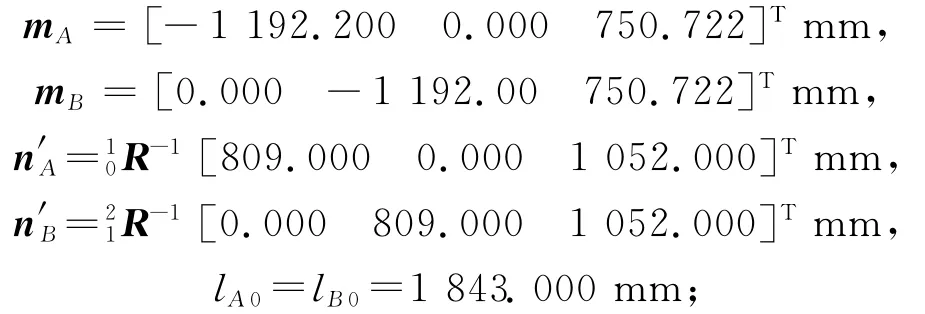
設發動機雙搖擺機構結構參數為
令輸入{ΔlA,ΔlB}={-60mm,105mm},將參數代入式(15),可得
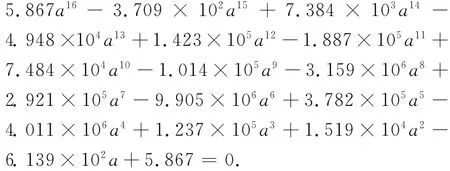
求解并舍去復 數 解,有a1=-1.980 2,a2=-0.065 9,a3=0.058 0,a4=5.406 6,與之相應的α解 為α1=-126.413 5°,α2=-7.539 5°,α3=6.633 6°,α4=159.042 1°。顯然只有α2,α3在運動范圍(-10°,10°)內,舍去其余解,為剔除無效解,將a2=-0.065 9分別代入式(13)、(14)求解并舍去復數解,分別得b1=-5.055 0,b2=0.099 3;b1=-3.205 5,b2=-0.157 2。可知a2=-0.065 9不能使式(13)、(14)同時成立,為無效解。將a3=0.058 0分別代入式(13)、(14),求解并舍去復數解,分 別 得b1= -5.635 9,b2=- 0.018 0;b1=-3.172 0,b2=-0.018 0。判斷可知a3=0.058 0,b2=-0.018 0是式(13)、(14)的一組共同解,則β=-2.062 4°,處于有效運動范圍內。由此,當輸入為{ΔlA,ΔlB}={-60mm,105mm}時,發動機的鉸鏈轉角 {α,β}= {6.633 6°,-2.062 4°}。
3 運動學反解
發動機并聯雙搖擺機構的運動學反解,就是在已知發動機姿態(即已知鉸鏈轉角α,β)的前提下求解兩臺伺服機構作動筒的伸縮量,即已知發動機推力矢量的方向 {α,β}求 {ΔlA,ΔlB},搖擺機構運動學反解直接用于火箭姿態控制算法。與運動學正向求解過程相比,運動學反向求解簡單。簡化式(9)、(10)并將已知參數代入,可得

式中:LA,LB(>0)為已知參數的函數表達式,其物理意義為電液伺服機構的總長度,且

由|lA|=lA0+ΔlA,|lB|=lB0+ΔlB,可得運動學反解 ΔlA=LA-lA0,ΔlB=LB-lB0。此處:lA0,lB0分別為兩臺伺服機構的初始長度。
將 上 述 運 動 學 正 解 {α,β} = {6.633 6°,-2.062 4°}代 入 式 (16),(17)可 得LA=1 782.885 5mm,LB=1 947.990 9mm,與之對應的{ΔlA,ΔlB}={-60.114 5mm,104.990 9mm},該結果與上述正向求解的輸入值{ΔlA,ΔlB}={-60mm,105mm}基本一致。
4 SimMechanics仿真驗證
為驗證運動學正向求解算法在整個發動機運動范圍內的有效性和精度,根據發動機并聯雙搖擺機構的物理和幾何關系,在SimMechanics環境中建立驗證模型,在表1兩種輸入條件下對機構模型進行計算和仿真,結果如圖3~6所示[6]。

圖3 ΔlA=-10mm時αFig.3 Calculating and simulation values of αatΔlA=-10mm
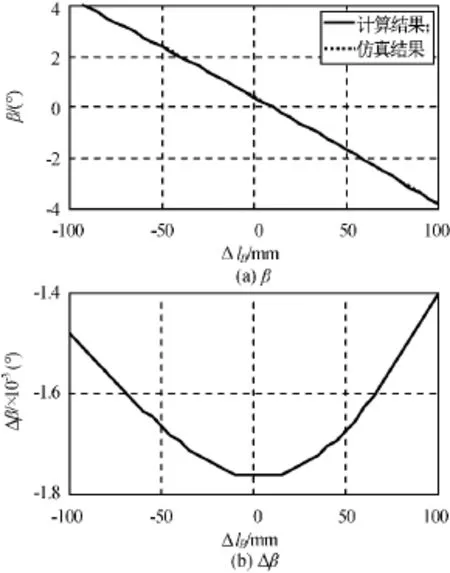
圖4 ΔlA=-10mm時βFig.4 Calculating and simulation values of βatΔlA=-10mm
由圖可知:計算和仿真結果幾乎完全重合,證明計算結果和模型正確。其中α,β的誤差量級分別為10-4,10-3(β的誤差大于α的原因是求解β過程中多次截斷誤差累加),該誤差級別遠小于機構彈性變形和加工工藝導致的誤差,由此可見本文計算方法有充分的精度。

圖5 ΔlB=-8mm時αFig.5 Calculating and simulation values of αatΔlB=-10mm
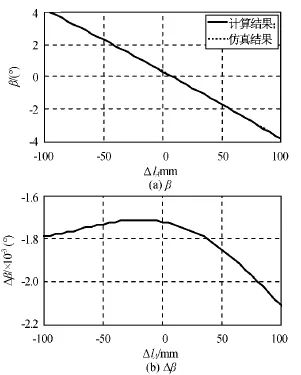
圖6 ΔlB=-10mm時βFig.6 Calculating and simulation values of βatΔlB=-10mm
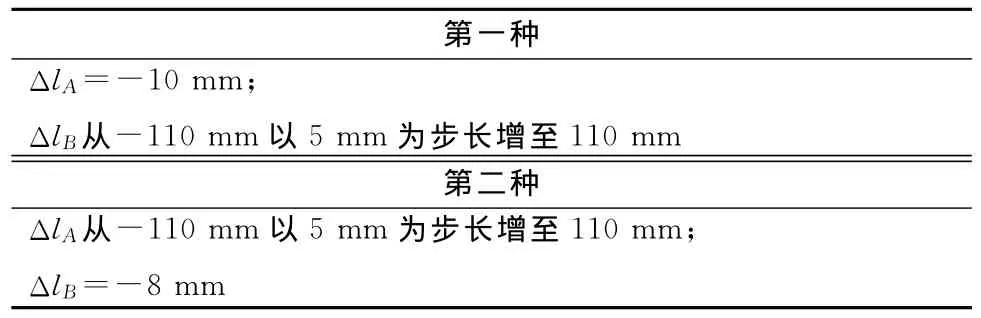
表1 兩種輸入條件Tab.1 Two input conditions
5 線性化方法誤差分析
某新型火箭研制過程中,用傳統線性化方法處理搖擺機構伺服作動筒伸縮位移和發動機俯仰角與偏航角關系,即簡單認為伺服機構最大伸縮量110mm對應于發動機偏航角或俯仰角最大值6.5°,伺服機構最小伸縮量-110mm對應于發動機偏航角或俯仰角最小值-6.5°,將兩者視為比例關系,其處理必存在誤差。另外,由于發動機搖擺中心與伺服機構支點不在一個平面,發動機俯仰角和偏航角存在干擾。
在圖1中,當俯仰伺服機構B推動發動機運動時,發動機繞Ox,Oy軸均有轉動,即俯仰伺服機構的運動對發動機俯仰角和偏航角都有作用,偏航伺服機構亦是如此。傳統近似處理方法忽略了伺服機構運動對另一個轉角的影響。在表1輸入條件下分析上述近似線性化方法存在的誤差,結果如圖7~10所示。由圖可知:俯仰角(θx)和偏航角(θy)用近似線性化方法計算的結果存在較大誤差,且偏差隨輸入值增大而變大,最大偏差為0.4°/6.5°=6.15%。
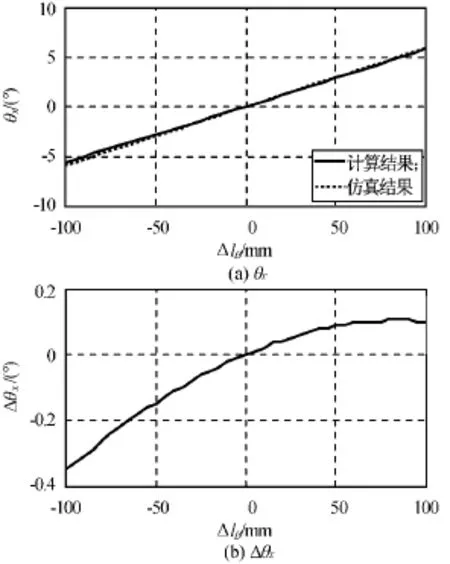
圖7 ΔlA=-10mm時θxFig.7 Calculating and simulation values of θxatΔlA=-10mm
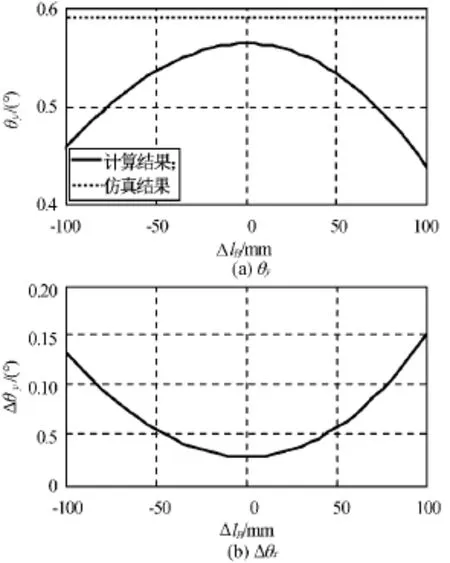
圖8 ΔlA=-10mm時θyFig.8 Calculating and simulation values of θyatΔlA=-10mm

圖9 ΔlB=-8mm時θxFig.9 Calculating and simulation values of θxatΔlB=-8mm
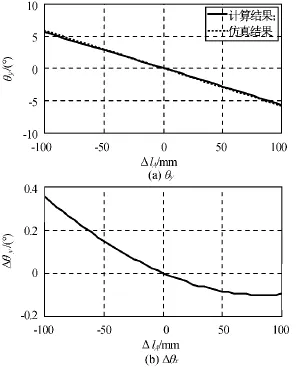
圖10 ΔlB=-8mm時θyFig.10 Calculating and simulation values of θyatΔlB=-8mm
6 結束語
本文對火箭發動機并聯雙搖擺機構進行了運動學分析,根據機構物理構成特點,用矢量方法列出了運動約束方程,引入半角公式并用Sylvester消元方法得到了一元16次方程,給出了運動學正向求解方法,并導出了運動學反解的解析表達式。SimMechanics建模仿真驗證結果證明運動學正向求解方法正確。用本文方法分析了現有線性化近似計算方法的誤差。研究可為火箭控制系統設計提供參考。
[1] 朱忠惠.推力矢量控制伺服系統[M].北京:宇航出版社,1995:360-376.
[2] PETUYA V,GUTIERREZ J M,ALONSO A,et al.A numerical procedure to solve non-linearkinematic problems in spatial mechanism[J].International Journal for Numerical Methods in Engineering,2008,73(6):825-843.
[3] 黃 真.高等空間機構學[M].北京:高等教育出版社,2006:141-146.
[4] 蔡自興.機器人學[M].北京:清華大學出版社,2000:46-51.
[5] 羅佑新.機構綜合的結式消元法及其 MAPLE實現[J].紡織學報,2005,26(2):79-81.
[6] 王英波,黃其濤,鄭書濤,等.Simulink和SimMechanics環境下并聯機器人動力學建模與分析[J].哈爾濱工程大學學報,2012,33(1):100-105.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15