深孔內徑的在線精密測量原理及系統
2015-12-26 05:57:46丁正龍徐月同傅建中
西安交通大學學報 2015年1期
丁正龍,徐月同,傅建中
(浙江大學流體動力與機電系統國家重點實驗室,310027,杭州)
?
深孔內徑的在線精密測量原理及系統
丁正龍,徐月同,傅建中
(浙江大學流體動力與機電系統國家重點實驗室,310027,杭州)
針對深孔零件內徑測量精度要求高、測量空間受限的問題,利用機械測量轉換機構和電感位移傳感器,研制了一種深孔內徑在線精密測量裝置。首先對測量轉換機構進行力學分析,推導出影響該機構測量精度的主要因素,然后提出一種針對該裝置系統的誤差補償方法,并搭建了在線測量平臺,最后將測量裝置安裝在自動化生產線上,在工作狀態下對某已標定深孔內徑尺寸的工件進行多次重復測量實驗,根據六西格瑪理論對該測量系統進行統計學分析。分析結果表明:為了提高系統的測量精度和動態特性,轉換機構設計時應該選擇較大的剛性比和合理的簧片高度,以保證較小的寄生轉角和較大的固有頻率。實驗結果表明:測量系統偏倚為0.02 μm,測量極差為2 μm,測量精度為3 μm。該裝置具有結構簡單、測量精度高的優點,能夠滿足深孔內徑在線測量要求。
深孔;內徑測量;轉換機構;寄生轉角;誤差補償
深孔內徑測量是長度測量中的關鍵技術之一。自動化生產線在線測量環境較為惡劣,測量精度影響因素眾多,受工作環境與測量空間的限制,高精度傳感器一般很難直接安裝到被測孔內進行自動化測量,因此如何高精度、高效率地測量深孔內徑一直是行業技術難題[1]。
目前,針對深孔內徑測量問題的研究主要分為非接觸式測量和接觸式測量兩個方向。非接觸式測量在工業測量中已廣泛應用,例如綜合運用電子學、光電探測以及圖像處理等技術的工業視覺檢測[2-7]。但是,采用高精度非接觸式方法測量深孔內徑時,對測量環境要求比較高,所需要的系統也比較復雜,使附加成本急劇上升,在工業在線檢測實踐中難以推廣[8-9]。此外,三坐標測量機和觸發式測頭在工業實踐中也有廣泛應用,但是三坐標測量機由于設備靈活性低,一般適用于線下測量;觸發式測頭容易受機床自身精度影響,一般用于高精度機床的機內測量。在檢測機構設計中,懸臂梁機構由于結構簡單,可靠性好,已有廣泛應用[10-13]。傳統的懸臂梁結構多用在三維測頭上,導向范圍比較小,寄生轉角所引起的導向誤差為納米級,可忽略不計,但是為了適應深孔內徑高精度測量,必須增加測量臂的長度以及平動板行程,誤差經過測量臂放大后,對實際測量數據的影響需要進行精確分析和補償。
本文利用機械結構穩定性好的特點,結合高精度的電感位移傳感器,設計出一種深孔內徑測量轉換機構,然后通過力學分析推導出測量精度的主要影響因素,繼而提出一種誤差補償方法,并以此理論為基礎制造出轉換機構實體,搭建了在線檢測量平臺進行測量實驗,進行了統計學分析。實驗結果表明,該深孔內徑測量系統具有結構簡單、反應靈敏、導向精度高和結構緊湊等優點,提高了深孔類零件在線檢測效率和精度。
1 轉換機構工作原理
圖1所示為測量轉換機構簡圖,實線所示為簧片在外力作用下處于大變形狀態,即初始狀態,雙點劃線所示為測量狀態。為便于測量臂進入孔內測量,測量前在外力作用下平動板帶動測量臂向內收縮;待測量臂進入孔內時,撤去外力,此時簧片恢復力大于彈簧力,平動板隨著簧片沿孔徑向往外運動,直到兩個測頭皆與工件內孔表面接觸后才停止運動,傳感器測出平動板水平方向位移,結合兩個轉換機構傳感器的數據,得出工件孔徑尺寸。

1:測量平臺;2:簧片;3:剛性夾板;4:傳感器;5:彈簧;6:平動板;7:測量臂;8:內孔表面圖1 轉換機構簡圖
在理想狀況下,測量過程中簧片AB、CD發生的彈性變形完全相同,平動板相對于測量平臺做平動。在實際測量過程中,由于簧片AB、CD受力變形情況并不相同,平動板會發生微小角度旋轉,稱該轉角為寄生轉角α。
2 轉換機構力學分析
2.1 轉換機構受力分析

圖2 轉換機構受力分析示意圖
圖2所示為轉換機構工作時受力分析示意圖,在不影響結果的前提下,為了簡化模型,把測量臂、平動板以及剛性夾板設為剛性,忽略重力作用。簧片AB在水平方向的力F1、彎矩M1以及垂直方向上的壓力P1的共同作用下,產生向左偏轉和壓縮變形;簧片CD在水平方向的力F2、彎矩M2以及垂直方向上的拉力P2的共同作用下,產生向左偏轉和拉伸變形。由于兩簧片變形量不同,導致平動板發生寄生旋轉,兩簧片在水平方向的變形量分別為X1、X2,在垂直方向的變形量分別為ΔH1、ΔH2,簧片總高度為H,彈簧預緊力為f,彈簧作用點與中心點O的距離為l,測量臂高度為h,兩簧片間距離為L,簧片中間剛性夾板長為a,簧片上下柔性部分長度皆為b。
2.2 簧片撓曲變形分析
簧片AB和CD結構相同,可以簡化為單個懸臂梁進行分段建模。為了便于求解,將簧片分為上中下3段,其中上下兩段均為彈性體,彈性模量為E,中間段為剛性體,如圖3a所示,此處由于垂直分力P對簧片撓曲變形影響較小,可以忽略。ω為撓度,β為簧片變形轉角,由于簧片是由3段組合而成的,根據撓曲線方程(1)和疊加法求解彎曲變形[14],可以得到簧片撓度和轉角分段函數,如式(2)~(4)所示,具體分段過程參見圖3。

(a)簧片整體撓曲變形

(b)第3段簧片撓曲變形圖3 懸臂梁簡化模型示意圖
撓曲線方程為
(1)
(1)當x∈[0,b)時,由疊加法求解彎曲變形可得ω1=ωF1+ωM1,ωF1、ωM1分別表示力F和力矩M對第1段簧片作用所產生的撓度;β1=βF1+βM1,βF1、βM1分別表示力F和力矩M對第1段簧片作用所產生的轉角;由撓曲變形公式可得簧片第1段的撓度ω1和轉角β1的表達式如下
(2)
(2)當x∈[b,H-b)時,簧片為剛性,此時簧片撓度由兩部分組成,一部分為b點撓度,另一部分為轉角α引起的剛性部分的位移(x-b)tanβb。在該區間內轉角為常數,且b點處轉角連續,即β1(b)=β2(b),根據疊加法求解彎曲變形公式和撓曲變形公式,可推導出該段簧片撓度ω2和轉角β2的表達式如下
(3)
(3)當x∈[H-b,H]時,對機構整體分析可知,平動板寄生轉角遠小于簧片撓曲變形后的轉角,因此簧片頂端撓度方向和轉角方向與前兩段相反,根據疊加法求解彎曲變形公式和撓曲變形公式,可推導出該段簧片撓度ω3和轉角β3的表達式如下
(4)
由于簧片頂端與平動板固定,即簧片頂端撓度ω(H)=Y,記Y為簧片頂端測量位移;轉角β(H)≈0,又ω(0)=0,β(b)=β(a+b),代入式(4)可推出簧片所受力與力矩,如下式所示
(5)
2.3 求解平動板寄生轉角
根據圖2所構建的分析模型,對機構整體分別進行幾何和力學分析,列出變形協調方程,得到下式
(6)
(7)
當α趨于很小時,sinα≈α,cosα≈1,則式(6)和式(7)可以簡化為式(8)和式(9)
(8)
(9)
在機構中,簧片變形由撓度變形和拉壓變形組合而成,其沿x軸方向的變形量為
(10)

聯解方程組(9)和(10)可得
(11)
聯解方程組(4)、(8)、(9)和(11),可以得到平動板的寄生轉角為
(12)
2.4 轉換機構動力學特性分析
轉換機構AB和CD上各有2段小簧片,對測量過程中某一簧片進行分析,將簧片整體簡化為偽剛體模型,建立如圖4所示的坐標系。

圖4 簧片受力偽剛體模型
單個簧片在載荷作用下的彈性勢能可表述為V=kβ2/2,整個轉換機構的總勢能如下
VT=(m1+m2)gH+2kβ2
(13)
式中:m1為平動板質量;m2為剛性夾板質量;k為簧片剛度系數。在簧片上取任意一點(x,y)對時間求導,可以得出該點速度,然后對簧片進行動能積分。由2.2小節的邊界條件可知,單個簧片的動能T=mb2β2/2,因此整個轉換機構的總動能如下
(14)
式中:m為簧片單位長度質量;J為剛性夾板的轉動慣量。由式(13)、(14)及系統Lagrange函數可知,轉換機構的動力學方程為
(15)
由式(15)可知系統固有頻率為
ωn=[(4k-2mb2)/(m1H2+2J)]1/2
(16)
由上式可知,系統固有頻率受簧片性能參數(見表1)影響較大:①簧片長度b越小(剛性比ρ越大),固有頻率ωn越大;②簧片幾何參數確定時,固有頻率ωn隨簧片剛度k的增加而增加;③簧片高度H增大,固有頻率ωn減小。
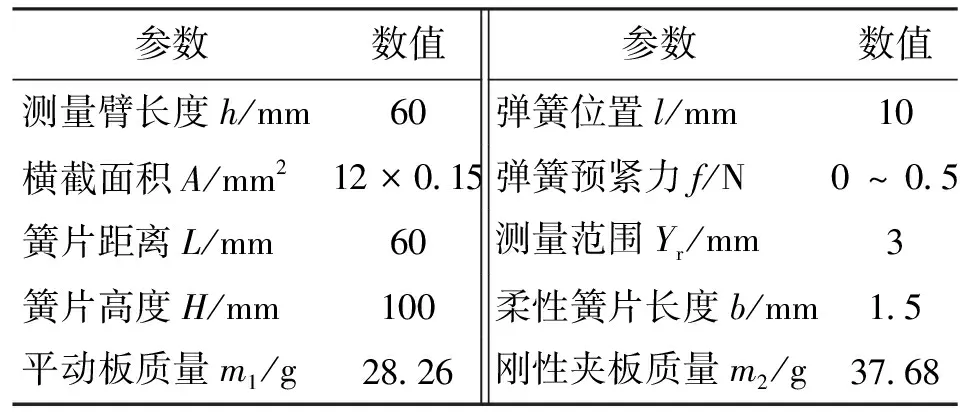
表1 轉換機構物理參數
將表1參數代入式(16)中,其中簧片機構所選材料的彈性模量E為128 GPa,泊松比μ為0.3,得出ωn=2.7 kHz,遠大于生產線振動頻率。在實際測量過程中,未發現共振現象,檢測裝置采樣時間為4 s,動態特性能夠滿足生產線在線檢測要求。
3 轉換機構誤差研究
測量轉換機構誤差主要由機構安裝誤差、測頭補償誤差以及平動板導向誤差3部分組成。機構安裝誤差δ1是指測頭中心軸線與工件中心平面的偏差,一般通過千分表進行手工調整或者通過軟件進行補償。測頭補償誤差δ2是指測頭規劃位置和測頭實際位置存在的偏差,可采用在線標定技術建立測頭補償的誤差列表,然后采用雙線插值運算得到測頭球面任意位置法矢信息和測頭半徑補償值,再根據法矢信息找到對應的誤差值進行對應補償[16]。
3.1 平動板導向誤差分析
平動板導向誤差是通過平動板寄生轉角α來表達的,α越小,則導向精度越高。因此,可以通過間接分析測量轉換機構各參數對寄生轉角的影響,來分析平動板導向誤差。由式(12)可知,在保證足夠測量位移Y的前提下,為了減小轉換機構導向誤差,提高測量精度,可以適當增加兩簧片間距離L和簧片柔性部分橫截面積A,亦可以合理減小彈簧的預緊力f。圖5所示為寄生轉角α與測量位移Y之間的關系。由圖可知,在Y及其他參數一定的情況下,簧片越高,平動板寄生轉角越小,但當簧片高度H達到一定值時,繼續增加H對寄生轉角的影響逐漸減小。由式(16)可知,ωn隨H的增大而減小。因此,在滿足導向精度的前提下,應該合理地選擇H,以提高系統的抗干擾能力。

圖5 寄生轉角與測量位移之間的關系


圖6 寄生轉角與簧片剛性比之間的關系
比較圖5和圖6可知,在其他參數一定時,ρ比Y所引起的寄生轉角大10倍左右。因此,在綜合考慮各參數對ωn和α的影響程度后,合理地選取轉換機構各主要參數,得到較小的α,并計算出寄生轉角所引起的平動板導向誤差
δ3=(h+l)α
(17)
3.2 誤差補償
由上述誤差分析可知,補償后工件內孔直徑可以表達為
YR=YM+δ1+δ2+δ3
(18)
(19)
工控機在獲得測量數據后,補償上述3種誤差,即可得到工件實際尺寸,總體誤差補償流程圖如圖7所示。

圖7 誤差補償流程圖
3.3 實驗驗證
在上述理論基礎上設計并搭建了測量裝置樣機,如圖8所示(為了便于表達,圖中省去裝夾具),具體參數見表1。將測量裝置安裝在自動化生產線上,如圖9所示,其中電感傳感器分辨率為0.5 μm。

圖8 測量裝置示意圖
在生產線正常工作狀態下,對某孔徑YB為52.001 mm、孔深為300 mm的零件進行測量實驗,實驗分為20組,每組分別進行5次測量,測量結果如表2所示。

表2 測量結果 mm

(20)

4 結 論
通過對深孔內徑測量轉換機構建立整體數學模型,并對轉換機構中簧片提出分段建模,然后進行力學和幾何分析,找出了測量機構工作過程中影響測量精度的主要因素有兩簧片間距離L、簧片的橫截面積A、彈簧的預緊力f、簧片高度H、簧片剛性比ρ以及測頭半徑補償誤差δ2;最后,提出一種誤差補償方法,并搭建了深孔內徑測量平臺,對理論進行了實驗驗證。實驗結果顯示,深孔內徑測量系統誤差為0.02μm,測量極差為2μm,測量精度為3μm,表明該測量系統具有結構簡單、反應靈敏以及測量精度高等優點,有效地解決了深孔內徑測量問題。
[1] MA Y Z, YU Y X, WANG X H. Diameter measuring technique based on capacitive probe for deep hole or oblique hole monitoring [J]. Measurement, 2014, 47: 42-44.
[2] SHAHABI H H, RATNAM M M. Assessment of flank wear and nose radius wear from workpiece roughness profile in turning operation using machine vision [J]. International Journal of Advanced Manu-facturing Technology, 2009, 43(1/2): 11-21.
[3] 裘祖榮, 陳浩玉, 胡文川, 等. 基于嵌入式的角度視覺檢測及誤差補償 [J]. 光學精密工程, 2013, 21(10): 2480-2487. QIU Zurong, CHEN Haoyu, HU Wenchuan, et al. Embedded angle vision inspection and error compensation for line structured lights [J]. Opt Precision Eng, 2013, 21(10): 2480-2487.
[4] RIBY A B, PRASHANT S, SONAKAR M, et al. Identification of defects on highly reflective ring components and analysis using machine vision [J]. International Journal of Advanced Manufacturing Technology, 2011, 52(1/2/3/4): 217-233.
[5] YU Y X, ZHANG H, WANG Z C, et al. Deep-hole inner diameter measuring system based on non-contact capacitance sensor [J]. Transactions of Tianjin University, 2010, 16(6): 447-451.
[6] 葉樹亮, 譚久彬. 基于動態阿貝原則的高精度激光深孔內徑測量 [J]. 光電子·激光, 2008, 8(15): 971-974. YE S L, TAN J B. High precision laser deep hole diameter measurement based on dynamic Abbe’s prin-ciple [J]. Journal of Optoelectronics·Laser, 2008, 8(15): 971-974.
[7] 王家貴, 李林峰. 基于邁克爾遜干涉原理的孔徑測量及裝置設計 [J]. 工具技術, 2013, 47(4): 58-60. WANG Jiagui, LI Linfeng. Aperture measurement which based on Michelson interference principle and design of device [J]. Tool Engineering, 2013, 47(4): 58-60.
[8] STONE J, MURALIKRISHNAN B. Geometric effects when measuring small holes with micro contact probes [J]. Journal of Research of the National Institute of Standards and Technology, 2011, 116(2): 573-587.
[9] HRIOSHI M, AKIO K, HIROMICHI O. Development of a system for measuring micro hole accuracy using an optical fiber probe [J]. Journal of Advanced Mechanical Design, Systems and Manufacturing, 2010, 4(5): 995-1004.
[10]劉宇, 段耀宇, 劉利, 等. 懸臂梁陀螺儀機械性能優化及系統實現 [J]. 光學精密工程, 2012, 20(9): 2051-2059. LIU Yu, DUAN Yaoyu, LIU Li, et al. Mechanical performance optimization and system implementation of cantilever beam gyroscope [J]. Opt Precision Eng, 2012, 20(9): 2051-2059.
[11]趙立波, 徐龍起, 熱合曼艾比布力, 等. 矩形微懸臂梁的流固耦合諧振頻率分析 [J]. 西安交通大學學報, 2013, 47(11): 60-64. ZHAO Libo, XU Longqi, RAHMAN Hebibul, et al. Resonant frequency of the rectangular micro-cantilever in fluid-structure interaction [J]. Journal of Xi’an Jiaotong University, 2013, 47(11): 60-64.
[12]喬龍學, 王偉剛, 何姍. 雙懸臂梁直徑測量傳感器性能分析 [J]. 浙江大學學報: 工學版, 2012, 46(6): 1060-1066. QIAO Longxue, WANG Weigang, HE Shan. Perfor-mance analysis on twin-cantilever transducer for measuring diameter [J]. Journal of Zhejiang University: Engineering Science, 2012, 46(6): 1060-1066.
[13]崔巖, 張呂權, 夏勁松, 等. 壓電微懸臂梁探針的制作工藝研究 [J]. 西安交通大學學報, 2011, 45(1): 79-82. CUI Yan, ZHANG Lvquan, XIA Jinsong, et al. Fabrication of novel piezoelectric microcantilever probe [J]. Journal of Xi’an Jiaotong University, 2011, 45(1): 79-82.
[14]閆曉鵬, 武瑛. 材料力學 [M]. 北京: 清華大學出版社, 2013.
[15]MURANAKA Y, INABA M, ASANO T, et al. Parasitic rotation in parallel spring movements [J]. Int J Jpn Soc Pre Eng, 1991, 25(3): 208-213.
[16]王立成, 黃興達, 丁漢. 原位檢測系統中觸發式測頭的誤差分析與補償 [J]. 中國機械工程, 2012, 23(15): 1774-1778. WANG Licheng, HUANG Xinda, DING Han. Error analysis and compensation for touch trigger probe of on-machine measurement system [J]. China Mechanical Engineering, 2012, 23(15): 1774-1778.
[17]馬逢時, 周暐, 劉傳冰. 六西格瑪管理統計指南 [M]. 北京: 中國人民大學出版社, 2013.
[本刊相關文獻鏈接]
李朝輝,王昭,黃軍輝,等.滾轉角測量中直角棱鏡相位損失及解決方法.2014,48(9):112-116.[doi:10.7652/xjtuxb2014 09019]
彭希鋒,王玲,楊文劍,等.自適應優化控制的人工髖關節磨損三坐標測量及評估方法.2014,48(8):128-135.[doi:10.7652/xjtuxb201408022]
俞玨,莊健,于德弘.采用李雅普諾夫函數的電液伺服系統反饋線性化控制.2014,48(7):71-76.[doi:10.7652/xjtuxb 201407013]
楊軍,施虎,梅雪松,等.雙驅伺服進給系統熱誤差的試驗測量與預測模型構建.2013,47(11):53-59.[doi:10.7652/xjtuxb201311010]
曹建安,張樂平,吳昊,等.采用傾角傳感器實現空間旋轉角度測量的解析方法研究.2013,47(10):109-114.[doi:10.7652/xjtuxb201310019]
呂濤,劉志剛,鄧忠文,等.一種光纖組量程擴增的激光頻率掃描干涉絕對測距系統.2013,47(9):77-82.[doi:10.7652/xjtuxb201309013]
鐘麗紅,王昭,湯善治,等.機床滾轉角測量中敏感元件傾斜引起的誤差分析.2013,47(5):99-103.[doi:10.7652/xjtuxb 201305018]
鄧玉芬,郭俊杰,王金棟,等.激光跟蹤儀在重型車床幾何精度檢測中的應用.2013,47(1):74-79.[doi:10.7652/xjtuxb 201301015]
韓有昂,張英杰,喻明讓.一種有向投影的測量數據刀具軌跡生成技術.2011,45(9):11-14.[doi:10.7652/xjtuxb2011 09003]
張維光,趙宏.線結構光多傳感器三維測量系統誤差校正方法.2011,45(6):75-80.[doi:10.7652/xjtuxb201106014]
(編輯 荊樹蓉)
On-Line Precise Measurement Principle and System for Deep-Hole Diameter
DING Zhenglong,XU Yuetong,FU Jianzhong
(The State Key Lab of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
Considering the requirement on the high-precision measurement of deep-hole diameter with limited measuring space, a precise on-line measurement device for deep-hole diameter was designed using the mechanical measurement transformation mechanism and the inductive displacement transducer. First, the mechanics analysis of the measurement transformation mechanism was performed and the main factors affecting the measuring accuracy were deduced. Then, a method of systemic error compensation for the device was proposed, and the on-line measurement platform was set up. Finally, the measurement device was installed on the automatic production line, and the measuring experiments were carried out repeatedly to measure the calibrated inner hole diameter of a workpiece. The statistical analysis of the measurement system was performed based on the theory of Six Sigma. The analysis results suggest that in order to improve the measuring accuracy and dynamic performance of the system, a larger rigid ratio and a reasonable reed height should be chosen to ensure a smaller parasitic rotation and a higher natural frequency when the transformation mechanism is designed. The experimental results suggest that the system bias is 0.02 μm, the range is 2 μm and the measuring accuracy is 3 μm. The device has the advantage of simple structure and high precision, which meets the requirements of on-line measurement of deep-hole diameter.
deep-hole; diameter measurement; transformation mechanism; parasitic rotation; error compensation
2014-06-09。
丁正龍(1988—),男,碩士生;傅建中(通信作者),男,教授,博士生導師。
國家科技支撐計劃資助項目(2013BAF05B00)。
時間:2014-10-15
10.7652/xjtuxb201501011
TH822;TH135
A
0253-987X(2015)01-0065-07
網絡出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20141015.1751.001.html
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
