鏟篩激振式馬鈴薯挖掘機的設計與研究
2015-12-18 09:35:34張瑞孫偉吳建民王蒂張俊蓮石林榕張華
農業現代化研究 2015年5期
關鍵詞:振動
張瑞,孫偉*,吳建民,王蒂,張俊蓮,石林榕,張華
(1.甘肅農業大學工學院,甘肅 蘭州730070;2.甘肅農業大學農學院,甘肅 蘭州730070)
我國馬鈴薯主產區75%在山區坡地,整體上機械化程度低,耐用適用中小型機械缺乏[1]。馬鈴薯收獲基本上靠人工刨挖,效率低、強度大、損失率高。近年來,我國農機專家針對馬鈴薯機械收獲薯塊損傷率高、明薯率低、適應性差等問題做了大量研究,并研制出了不同型號的馬鈴薯收獲機[2-6]。這些機型大多數由固定式挖掘鏟、升運鏈和抖動輪等工作部件構成,主要適用于較平坦的大面積沙土或沙壤土中工作,普遍存在行進阻力大、易于壅堵等問題[3,7]。丘陵山地不適宜大型機械作業,小型手扶類拖拉機雖然適應,但動力不足。因此丘陵山地作業、小型動力機械設計中,減阻尤為重要。本文以降低牽引阻力和提高土薯分離效率為主要目標,研究設計一種以手扶拖拉機為動力源的輕型馬鈴薯挖掘機,解決丘陵山地馬鈴薯機械化挖掘的問題。
1 整機結構及工作原理
1.1 總體結構
研究表明,采用振動式土壤工作部件的農機具可以降低牽引阻力[8-17],故將挖掘機設計成鏟篩激振式。馬鈴薯挖掘機主要由機架、挖掘鏟、分離篩、側欄柵、掛接機構、上支桿、下支桿、限位輪、伸縮拉桿、離合、偏心輪和皮帶輪等構成(圖1)。分離篩、鏟柄和側欄柵通過螺栓與挖掘鏟連接在一起,上、下支桿與鏟柄鉸接,上支桿固定在機架定位套上,挖掘機驅動軸的兩側各安裝了偏心輪,伸縮拉桿一端與偏心輪鉸接,另一端通過抱卡固定在下支桿上。
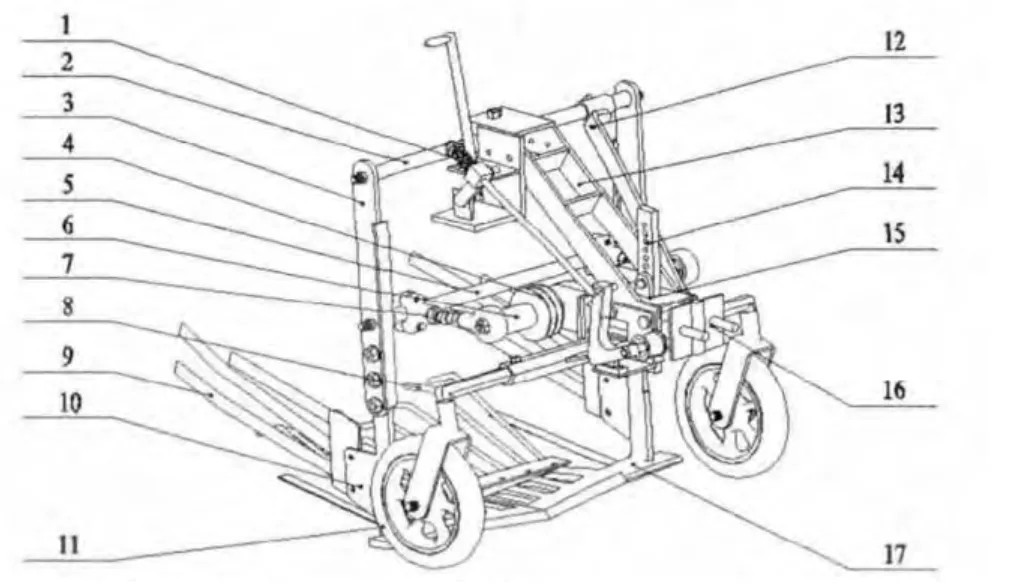
圖1 鏟篩激振式馬鈴薯挖掘機結構圖Fig.1 Structure diagram of vibrating potato digger with shovel and sieve
1.2 工作原理
作業時,結合皮帶張緊離合,拖拉機動力通過帶傳動傳至挖掘機皮帶輪,挖掘機皮帶輪帶動偏心輪轉動,偏心輪通過伸縮拉桿驅動挖掘鏟及分離篩繞上支桿往復擺動(圖2)。挖掘鏟將薯壟掘起,薯土混合物沿挖掘鏟面向后滑移,部分碎土從挖掘鏟柵格間落下,其余部分被送至分離篩。在分離篩齒條的作用下土塊被振碎,直徑小于齒條間隙的土塊和碎土從齒條間隙漏下,馬鈴薯被置于表層。
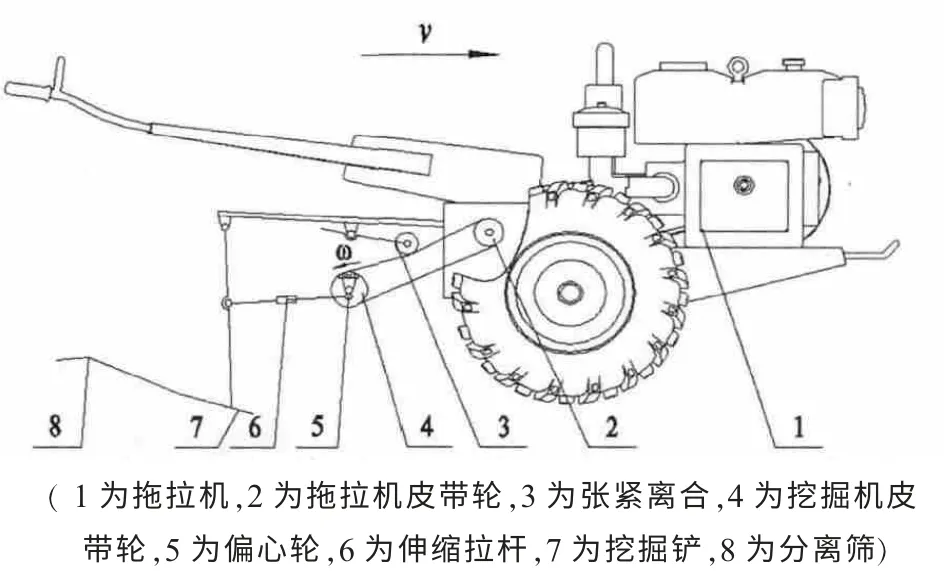
圖2 作業原理示意圖Fig.2 Schematic diagram of operation principle
2 傳動方案設計
2.1 動力結合方式選擇
小型馬鈴薯挖掘機多采用牙簽式離合器結合或切斷動力,由于慣性力在結合和分離動力瞬間,沖擊較大,傳動部件容易受損。為平順結合或切斷動力,簡化結構,采用皮帶張緊離合器。
2.2 動力傳遞方案設計
動力傳遞路線(圖2),拖拉機動力輸出軸通過皮帶將動力傳遞給馬鈴薯挖掘機從動輪,置于同軸的偏心輪隨帶輪轉動,偏心輪驅動搖臂運動。搖臂一端與偏心輪鉸接,另一端安裝在挖掘鏟擺動機構上,帶動挖掘鏟往復運動。
3 主要工作部件設計
3.1 挖掘鏟組件
手扶拖拉機功率有限,為滿足動力匹配要求,挖掘鏟應該能夠有效降低牽引阻力,提高分離效率,防止土壤壅堵,并且保證馬鈴薯挖凈率,不傷薯、不切薯。強迫振動能降低牽引阻力,減少工件的粘土掛草,改進碎土質量,提高生產率[14]。該機采用振動推進式三角平面鏟結構。挖掘鏟組件包括挖掘鏟、側護板和分離篩,側護板和分離篩分別安裝在挖掘鏟刀臂和刀體上。
3.1.1 挖掘鏟 挖掘鏟的尺寸和形狀影響著挖掘阻力,采用兩面或三面楔原理工作的耕作部件,土壤阻力由兩項組成:

式中:τ 為土壤對挖掘鏟的摩擦阻力(N);FN為挖掘鏟所受的正壓力(N);β 為土壤對金屬的摩擦角(°);C 為土壤切向粘附力(N)。
在挖掘深度一定的情況下,土壤阻力受C 影響較大,而土壤與挖掘鏟接觸面積是C 的主要決定因素之一。所以,在條件允許的情況下,盡量減小土壤與挖掘鏟接觸面積。
挖掘鏟由刀體和刀臂組成(圖3),刀體的主要參數為張角(2γ),長度(l)和寬度(b),國內學者已對這些參數作了深入的理論分析和試驗研究[2,4,7,9,18]。為保證較好的滑切性能,同時又避免鏟尖過長,形成較深的“∨”形溝底。2γ=π-ε,其中,ε 為土粒對刃口的摩擦角[18]。為提高土薯分離效率,減少進入分離篩的土壤,將刀體后端設計成柵條或柵格狀。在保證挖掘鏟強度的前提下,長度(l)盡量小,取200 mm。緩坡地、水平梯田馬鈴薯壟距無統一標準,多在50-60 cm 間,刀體寬度(b)取600 mm。
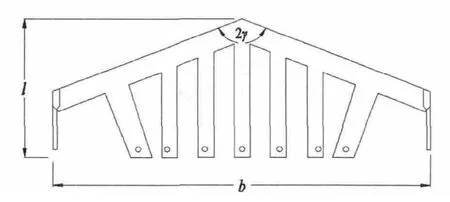
圖3 挖掘鏟簡圖Fig.3 Diagram of digging shovel
3.1.2 分離篩 分離篩安裝在挖掘鏟后端,是挖掘鏟的延續。分離篩分離效率直接影響挖掘機縱向結構尺寸,其性能除與振動形式有關外,還受自身結構影響。將分離篩設計成齒條狀,除了撕裂、橫向剪切和彎曲折斷的作用外,還增加了齒條對土壤的縱向剪切作用,提高了分離裝置的碎土性能。分離篩各齒條傾角(α')由中間向兩邊增加,且大于挖掘鏟傾角(α)(圖4)。若使土薯沿篩面不向下滑移,齒條傾角(α')應小于土壤與金屬間的摩擦角,即α'<arctanμ。另外,α'>25°時工作阻力上升較快,α'<10°時,隨α'減小,土壤阻力增加。基于上述原因,分離篩各齒條傾角(α')在15°-25°范圍內,分離篩中間齒條傾角取18°,最外側齒條傾角取25°,兩邊齒條對稱分布。由于分離篩各齒條傾角的差異,有利于進一步撕裂土垡,增加分離篩有效工作面積,提高分離效率。
圖4 分離篩Fig.4 Separation sieve
齒條間隙是分離篩另外一個重要參數,在歐洲許多國家,齒條間隙通常為25-28 mm,亞洲的日、韓等國為30-40 mm,美國為40-48 mm[19]。齒條間隙主要與馬鈴薯的品種與塊莖物理性狀有關,馬鈴薯不同方向尺寸不同,最小尺寸多在30-80 mm,故齒條間隙在30 mm 左右取值。
分離篩齒條長度影響著作業性能,過長,會增加工作阻力和操作難度;過短,土薯混合物至分離篩尾部分離不徹底、帶土過多導致埋薯。分離篩尾部應略高于壟面,超出部分高度記為Δh,可確定齒條長度,即'。為降低齒條對塊莖的碰撞強度,作業時,齒條末端存在少許土壤,在齒條與馬鈴薯之間形成緩沖層,減少對薯塊損傷。為避免緩沖層土壤掩埋落薯,齒條末端向后下方彎曲,彎曲角度θ 為20°-30°,彎曲段應使緩沖層土壤薯塊滑落到地表前分離徹底,又不可過長伸入土壤增加阻力,彎曲段長度值可為
3.2 擺動機構
擺動機構由上支桿、下支桿、側板、伸縮拉桿和偏心輪構成(圖5),主要功用是將偏心輪轉動轉化為挖掘鏟組件的擺動以及調整挖掘鏟的傾角。
圖5 擺動機構圖Fig.5 Diagram of swinging mechanism
為便于調整偏心距,將偏心輪設計成組合式(圖6)。通過增減墊片數量,可以調節偏心距,進而調節分離篩振幅。
圖6 偏心輪Fig.6 Eccentric wheel
改變伸縮桿長度(l2), 可以調整挖掘鏟傾角(α),α 影響著挖掘阻力和挖掘鏟結構尺寸,α 增大,挖掘阻力增大,挖掘鏟組件長度減小,α 的變化又會提升挖掘機適應性,故α 應在18°±δ 取值,則l2為:
式中:l'2為α 取18°時伸縮桿的長度(mm);λ 為伸縮桿與曲柄共線時側板與挖掘鏟間夾角(°);δ 為挖掘鏟傾角調整量(°)。
擺動機構實際上是一個鉸鏈四桿機構,由于挖掘鏟傾角(α)和分離篩齒條傾角(α')的存在,當挖掘鏟組件作往復運動振動時,位于分離篩上土薯混合物的慣性力,有抖動混合物的作用,可提高分離效果[20]。挖掘鏟組件與擺動機構側板固結,其角速度和加速度與擺動機構側板相同。若以曲柄在最右邊位置時作為擺動機構的位移和時間的起始相位,則側板的角位移(ζ3)和角速度(ω3)與時間(t)的關系為:

其中:X=l4-l1·cosζ1ζ1=ε+ωt
式中:l4為上支桿與偏心輪軸間的距離(mm);l3為上、下支桿的距離(mm);l1為偏心距(mm);ζ1為曲柄與OO'夾角(°);ω 為偏心輪角速度(rad/s);ε 為起始相位曲柄與OO'夾角(°);ζ3為側板與OO'夾角(°)。

式中:ζ2為伸縮桿與OO'夾角(°)。
作用在馬鈴薯和土塊上的力,除重力(mg)外,還有篩面的法向反力(FN')和摩擦力(f')。若提高碎土效果和分離效率,就要使得馬鈴薯和土塊被拋離篩面,則FN'=0。設在篩面B 點有一質量為m 土薯混合物,且其離鉸點O'最近,那么它的離心加速度(am)為:

馬鈴薯和土塊拋離篩面的條件是重力加速度在篩面垂直方向上的加速度分量小于am,即

式中:O'B 為B 點與鉸點O'的距離(mm);g 為重力加速度(m/s2)。
4 田間試驗結果與分析
為測試鏟篩激振式馬鈴薯挖掘機性能指標、土薯分離效率以及挖掘阻力,于2014 年10 月在隴中黃土高原半干旱區的定西市鳳翔鎮進行了田間試驗。10°以下緩坡,土壤類型為黃綿土,土壤含水率為16.4%。試驗前殺秧和揭膜處理,試驗地壟高18 cm、壟距60 cm、株距25 cm。牽引動力為東方紅200 P拖拉機,工作機為8.8 kW 亞美克手扶拖拉機,測力計為上海勵盾儀器儀表檢測技術有限公司生產的HF—10 k 數顯式推拉力計。 試驗中各項指標按《NY 648—2002—T 馬鈴薯收獲機質量評價技術規范》測定。
試驗中,結合皮帶張緊離合后可以明顯提高土薯分離效率,明薯率高達96.2%,無壅土現象出現,主要由于振動使得土塊尺寸變小,土條流動更加順暢。鏟篩激振式馬鈴薯挖掘機主要技術指標均滿足技術要求(表1)。
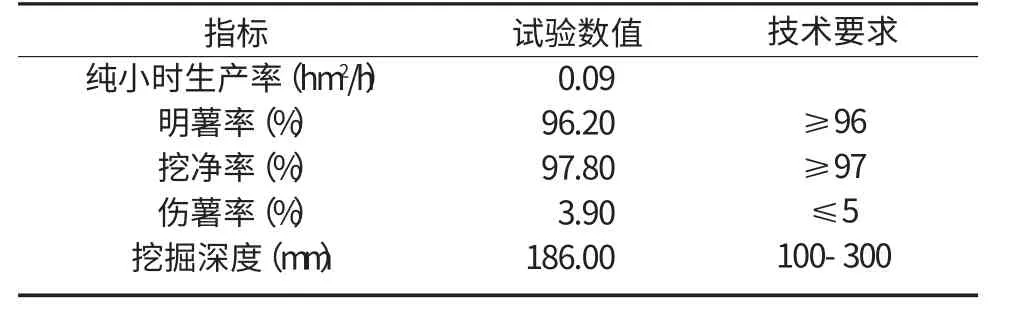
表1 性能試驗數據Table 1 The datas of performance test
振動挖掘牽引阻力明顯小于無振動挖掘,隨著振幅增加,牽引阻力變動幅度加大(圖7),其中,無振動時平均牽引阻力為1 498 N,振幅為4 mm 時平均牽引阻力為1 204 N,振幅為8 mm 時平均牽引阻力為995 N(表2)。這主要是當振幅增大時,土壤顆粒運動的位移增大,振動沖擊波在土壤中傳播的距離遠,將有利于土壤內摩擦力的迅速減小。
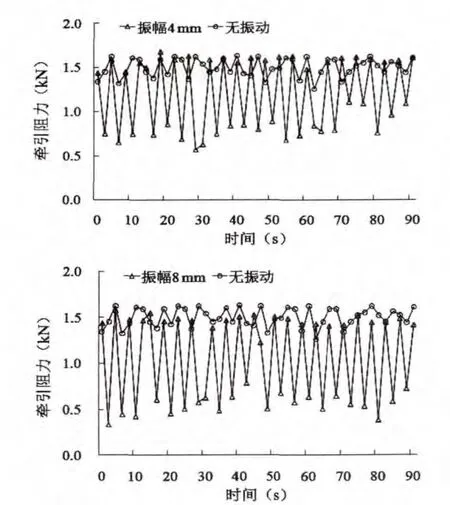
圖7 振幅對牽引阻力的影響Fig.7 Effect of amplitude on traction resistance
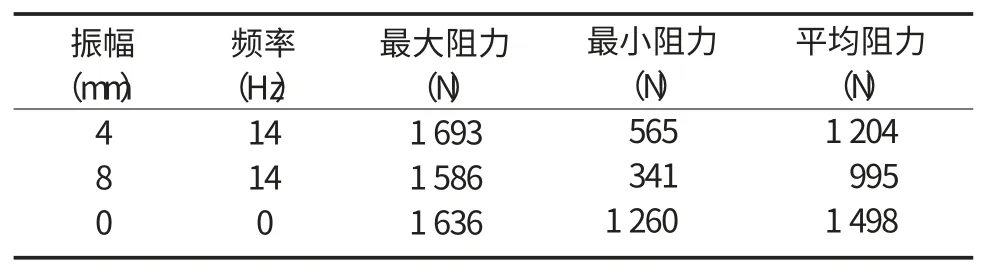
表2 牽引阻力對比Table 2 Comparison of traction resistance
仿真曲線平均值與試驗中挖掘機挖掘時所受阻力平均值、計算阻力平均值基本吻合(圖8)。鏟篩激振式馬鈴薯挖掘機的作業效果(圖9)。
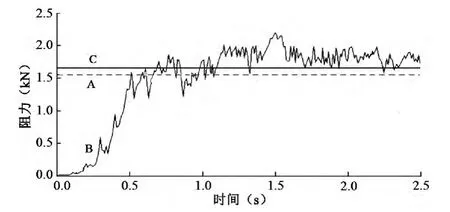
圖8 振動減阻仿真模型阻力曲線與試驗阻力、計算阻力平均值的對比Fig.8 Comparison of vibration resistance curve of drag reduction simullation,experimental and calculation average resistance

圖9 作業效果Fig.9 Effect of operation
5 結論
該機采用振動推進式三角平面鏟,可以減小挖掘阻力,隨著振幅增加,牽引阻力變動幅度增大;將挖掘鏟刀體后端設計成柵格狀,分離篩各齒條傾角由內向外增大,增加了土薯分離面積,提高了分離效率。田間試驗表明,該機明薯率、挖凈率和傷薯率等性能指標均達到馬鈴薯收獲機作業質量評價技術規范要求。
[1]金黎平.種子市場巡禮:中國馬鈴薯報告——產業發展概況[J].種子科技,2013,31(3):30-31.
[2]王建波,樊啟洲,田延慶.馬鈴薯挖掘機關鍵部件的研究現狀與展望[J].農機化研究,2011(1):244-248.
[3]劉寶,張東興,李晶.MZPH-820型單行馬鈴薯收獲機設計[J].農業機械學報,2009,40(5):81-86.
[4]趙滿全,趙士杰,佘大慶,等.組合分離式馬鈴薯挖掘機設計與研究[J].農機化研究,2007(4):69-72.
[5]賈晶霞,張東興,桑永英.馬鈴薯挖掘鏟計算機輔助分析與模擬試驗研究[J].農業工程學報,2006,22(8):106-110.
[6]吳建民,李輝,孫偉,等.撥指輪式馬鈴薯挖掘機設計[J].農業機械學報,2010,41(12):76-79.
[7]吳海平,侯建麗.4S-80馬鈴薯振動挖掘機牽引阻力的測試分析[J].山西農業大學學報,2009,29(4):351-354.
[8]文學洙,廉哲滿.影響振動式馬鈴薯挖掘機作業性能的主要參數[J].延邊大學學報:自然科學版,2007,33(3):199-202.
[9]韓杰,呂金慶,高靖華,等.振動式挖掘部件的設計[J].農機化研究,2004(3):118-119.
[10]Kang W S,Kim S H,Hahm Y C.Development of an oscillating potato harvester[J].Journal of the Korean Society for Agricultural Machinery,1989,14(1):16-23.
[11] KangW S, Lodriguez L A, Crow L D. Developing a small commercialpotato diggerⅡ: effects of design parameters on draft, torque, andpower[J]. Transactions of the ASAE, 2001, 44(6): 1391-1396.
[12]Wen X Z,Kang W S.Design parameters of a six-bar linkage vibrating digger[J].Journal of the Korean Society for Agricultural Machinery,2003,28(1):19-26.
[13]邱立春,李寶筏.自激振動深松機減阻試驗研究[J].農業工程學報,2000,16(6):72-76.
[14]曾德超.機械土壤動力學[M].北京:北京科學技術出版社,1995:591-599.
[15]Willam RG,Glen EV B.耕作和牽引土壤動力學[M].耕作和牽引土壤動力學翻譯組,譯.北京:中國農業機械出版社,1983.
[16]李霞,付俊峰.基于振動減阻原理的深松機牽引阻力試驗[J].農業工程學報,2012,28(1):32-36.
[17]彭卓敏,丁艷,朱繼平,等.耕作機械節能減排檢測技術分析與研究[J].中國農機化,2009(5):69-71,75.
[18]蔡國華,何進,李洪文,等.固定壟保護性耕作條件下松壟割刀性能對比分析[J].農業機械學報,2012,41(12):22-27.
[19]Kanafojski CZ,Karwowski T.收獲機械[M].曹崇文,吳春江,譯.北京:中國農業機械出版社,1983.
[20]吳守一.農業機械學(下)[M].北京:中國農業機械出版社,1987:135-137.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00