基于圖像分析的線纜節距測量算法研究
2015-12-06 06:11:56石守東
計算機工程 2015年11期
石守東,王 剛
(寧波大學信息科學與工程學院,浙江寧波315211)
基于圖像分析的線纜節距測量算法研究
石守東,王 剛
(寧波大學信息科學與工程學院,浙江寧波315211)
隨著線纜傳輸速度的不斷提高,對線纜節距的測量精度提出了越來越高的要求。為此,設計一種基于圖像檢測技術的節距測量算法。分割線纜的前景和背景圖像,根據前景像素點在特征空間中的分布情況,實現模糊C均值聚類。采用基于邊緣定位的特定像素點填充、圖像細化以及數據擬合技術,求得擬合方程的可行解以及相鄰可行解之間的距離,通過圖像比例尺將圖像節距值轉換為實際節距值。實驗結果表明,該測量算法可快速有效地計算出線纜節距,且與激光測距法的絕對誤差約為0.75%,具有較高的測量精度。
線纜節距;特征空間轉換;模糊C均值聚類;邊緣定位;數據擬合;激光測距
1 概述
隨著線纜傳輸速度的快速提升,其內部的信號串擾將不斷增大,這將嚴重影響線纜的信號傳輸質量。為了保證其信號傳輸質量,使串擾在可控范圍內,需要精確地測量線纜節距值[1]。在工業生產中可通過各種測量方法來測量線纜節距。傳統的節距測量法包括直接測量法、紙帶測量法、移線測量法與平均測量法等。以上測量方法都為人工測量法,其測量效率以及精度無法滿足實際工業生產的要求。
圖像分析技術主要依靠工控機的高速處理能力,依據特征提取與識別,從圖像中獲取所需信息。與人工測量方式相比,圖像分析技術具有以下優點:(1)當圖像分析技術中使用亞像素技術[2]時,可極大地提高測量精度。(2)測量系統與被測線纜之間無接觸,使得整個測量過程安全可靠。(3)整個測量過程由工控機完成,可節省人力物力,提高工業測量效率。目前,圖像分析技術已廣泛應用于工業生產的各個領域[3],包括工業產品的識別與定位、移動機器人的導航與定位、車輛的識別與跟蹤、醫學影像分析以及衛星遙感圖像分析與研究等。
目前國內外學者就圖像分析技術進行深入研究,并取得了諸多研究成果。文獻[4]提出一種基于霍夫變換的卷煙包裝紙損傷檢測方法,通過霍夫變換構建一套損傷判別標準,并根據檢測方法所測得的各種評價參數與該判別標準所設立的評價參數進行比較,實現卷煙包裝紙損傷的實時檢測。文獻[5]提出一種基于LOG-Zernike算子的工件圖像邊緣定位算法,首先定位算法通過LOG算子對工件圖像進行快速邊緣定位,在此基礎上利用Zernike矩法將測量精度提高到亞像素級別,用于實時高精度工件圖像的邊緣定位。文獻[6]提出一種基于橢圓模型的錐套檢測與跟蹤算法,采用電荷耦合元件(Chargecoupled Device,CCD)行列掃描的方式獲取錐套內部邊緣圖像,并利用數據擬合的方法確定橢圓模型參數,而錐套檢測則采用多點位搜索法提取錐套有可能存在的圖像區域,并對錐套進行跟蹤匹配和決策,實現錐套的精確定位與識別。
本文提出一種基于圖像檢測技術的節距測量算法,分割線纜的前景和背景圖像,利用模糊C均值(Fuzzy C-mean,FCM)聚類、基于圖像邊緣定位的特定像素點填充和數據擬合等技術,實現圖像線纜節距測量。
2 節距測量系統與算法實現
本文使用的節距測量系統如圖1所示,其硬件構架主要包括CCD高速攝像機、工業級無影燈、圖像采集卡、工控機、線纜傳動裝置,其測量方法為本文中的節距測量方法。下面對節距測量系統的工作流程做簡要介紹,首先通過CCD高速攝像機獲取線纜圖像,將其數字化后存儲于圖像采集卡中。然后利用本文所提出的測量方法通過工控機的圖形處理器(Graphics Processing Unit,GPU)并行處理[7]功能實時計算節距。

圖1 節距測量系統
節距測量算法如圖2所示,具體步驟如下:
步驟1 由于攝像機提供的圖像數據為RGB格式且其前景和背景的灰度值相差較大,為了快速分割前景與背景,使用灰度值進行閾值分割。
步驟2 由于灰度值無法有效描述前景中2種不同顏色的線纜在其特征空間中的分布情況,因此選取合適的特征空間,通過改進的模糊C均值聚類算法分割前景中2條線纜。由于前景中存在一些孤立的噪聲點,使用多尺度濾波將其除去。并利用形態學算法填充線對內部的孔洞,得到線纜1、線纜2的二值圖。
步驟3 將線纜1、線纜2的二值圖進行邊緣定位,分別標記二值圖的上下邊緣。依據上下邊緣對圖像特定區域進行像素點填充,修復線纜的缺失部分。
步驟4 對修復圖像進行細化操作,得到單像素點圖像。通過數據擬合,得到2個擬合方程,聯立方程求得可行解。其可行解之間的距離即為圖像節距。通過比例尺將圖像節距轉換為實際節距。
步驟5 通過激光測距[8]方法測得的節距與本文測量方法測得節距進行對比,檢驗本文算法精度。
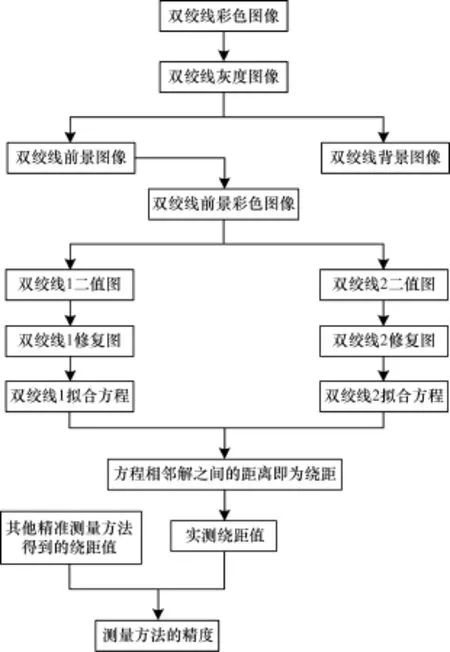
圖2 節距測量算法流程
針對本文所提出的繞距測量算法對圖像照度變化所引起的干擾的魯棒性問題進行如下說明:首先,本文所述的雙絞線圖像的成像方式為一種背光式成像方式,通過這種成像方式可使得雙絞線圖像的前景與背景之間的對比度差異更加明顯,所以,當圖像照度變化時,測量算法具有更好的魯棒性能。其次,本文用于分割雙絞線圖像前景與背景部分的算法是一種基于遞推查找表的二維Otsu算法,其分割前景與背景的原理是使得前景像素點與背景像素點之間的類間方差達到最大值,而基于遞推查找表的二維Otsu算法可以有效利用背光式成像方式其前景與背景之間的對比度差異明顯的特點,所以,當圖像照度發生變化時,基于遞推查找表的二維Otsu算法能夠快速準確地分割雙絞線圖像的前景和背景。最后,用于分割前景中2種不同顏色的絞線部分使用的是一種改進的模糊C均值聚類算法,算法所使用的特征空間為CMYK(Cyan,M agenta,Yellow,Black)空間,此特征空間是一個4維的彩色空間,當圖像照度變化時對圖像的色彩空間幾乎沒有影響。綜上所述,測量算法對圖像照度變化所引起的干擾的魯棒性較強。
3 線纜圖像分割
3.1 前景與背景分割
3.1.1 特征空間轉換
測量系統通過攝像機輸出RGB格式的圖像數據,其圖像如圖3所示,圖4為其灰度直方圖。從圖4可知,其灰度直方圖呈現雙峰特性,表明前景和背景灰度值相差較大。為了快速分割前景和背景,利用其灰度值進行閾值分割。

圖3 線纜圖像
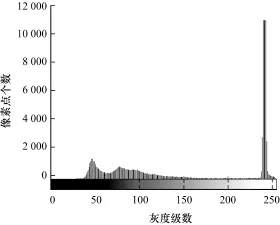
圖4 灰度直方圖
3.1.2 二維Otsu算法
設線纜灰度圖為I(i,j),其中,i∈[1,height];j∈[1,w idth];I(i,j)∈[0,L-1];height,width為灰度圖的高度和寬度;L為其灰度級數[9]。其n×n鄰域的平均灰度圖G(i,j)可表示為:

對于灰度圖中任意一點(i,j),可將I(i,j)與G(i,j)構成二維直方圖。通過二維直方圖分割圖像可有效提高算法的抗噪能力,降低算法的誤分割率。設I(i,j)中值為I且G(i,j)中值為G的像素點數為fij,則線纜二維直方圖的概率密度函數可表示為:

對于給定的閾值(s,t),可將二維直方圖劃分為4個區域,如圖5所示。其中,區域Ⅲ,Ⅱ分別為線纜前景和背景;Ⅰ,Ⅳ為噪聲點。設ω0,ω1為前景和背景像素點出現的概率,其可表示為:

其中,0≤s<L-2;0≤t<L-2。

圖5 二維直方圖的區域劃分
前景以及背景的灰度均值矢量μ0,μ1可表示為:

其中,0≤s<L-2;0≤t<L-2,且ω0≠0,ω1≠0。
整幅圖的灰度均值矢量可表示為:

假設圖像中所有像素點都位于Ⅱ,Ⅲ中則有:

前景和背景的類間方差可表示為:

使得類間方差S達到最大的閾值(s,t)即為最優閾值。
3.2 基于遞推查找表的二維O tsu算法
在二維Otsu算法中,其假設區域Ⅰ,Ⅳ的概率密度為0。但從圖6中可知,其概率密度分布于二維直方圖的主對角線上,認為區域Ⅰ,Ⅳ的概率密度為0這種假設不符合實際情況。針對以上不合理的假設,本文對二維直方圖重新劃分,新的劃分圖如圖7所示,并建立了3個查找表用于二維概率密度以及2個方向上灰度均值的快速查找,避免大量重復計算。

圖6 二維直方圖概率密度分布
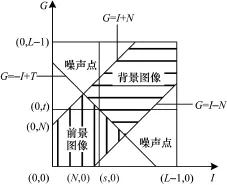
圖7 二維直方圖區域的重新劃分
圖7 對二維直方圖進行了重新的劃分,通過直線G=I+N和G=I-N將直方圖中所有概率密度不為0的點包括在內,即可控制直線中N的取值有效減少所需統計的區域面積,并使統計區域的概率密度和為1。其中,N代表本文中前景與背景分割算法中二位直方圖中所囊括99.99%以上像素點的最小取值;s為原始二維直方圖中的分割閾值。在本文中N取35,其所需統計的概率密度點數約為原始的25.47%。通過直線G=I+N和G=I-N可將二維直方圖分為可用點區(陰影部分所在區域)以及無用點區(非陰影部分所在區域)。再通過直線G= -I+T可將陰影部分分為前景和背景。
在二維Otsu算法中,通過計算不同組合的閾值(s,t)使得類間方差S最大,其中存在大量的重復計算。在基于遞推查找表的二維Otsu算法中,通過利用概率密度查找表ω(i)以及二維直方圖2個方向上的灰度均值查找表μi(i),μj(i),可有效減少重復計算。3個查找表通過遞推算法實現,其可表示為:
(1)當0<T≤N時:

通過使得式(14)中的類間方差S達到最大值時的分割閾值T即為最優分割閾值,利用此最優分割閾值T即可實現雙絞線圖像前景和背景的快速分割。
3.3 前景圖像分割算法
由于前景中2種不同顏色的線纜灰度值相差不大,利用改進的二維Otsu算法無法將其分割。英尺將RGB空間轉換為CMYK空間,為了避免模糊C均值算法[10-11]隨機初始化聚類中心,提出了利用最優二叉樹思想[12]進行初始化聚類中心,進而進行模糊聚類。其初始化聚類中心的方法具體如下:
隨機選取前景中row列共m個像素點作為聚類中心初始化樣本點,樣本點image-init的計算公式如式(15)所示。D為任意兩樣本點之間的距離,稱其為相異度矩陣,計算表示如式(16)所示。

步驟1 初始化最優二叉樹。設最優二叉樹可用矩陣tree表示,tree中的內容包括結點序號,結點權值(像素點在特征空間的坐標位置)以及代表此結點是否在二叉樹上的標志位(1代表結點在二叉樹上,0代表結點不在二叉樹上)。當初始化二叉樹時,將所選取的m個結點添加到樹上。
步驟2 該步驟需循環執行m-1次。首先求相異度矩陣D中的最小值,其對應的2個結點。以這2個結點為父親結點生成一個新的子結點,新生成的子結點權值為其2個父親結點權值的平均值,將新生成的子結點添加到二叉樹中去,并將2個父親結點從二叉樹中移除。利用新的二叉樹矩陣tree更新相異度矩陣D,其更新如式(16)所示。
通過以上方法便可以得到初始化的聚類中心點。改進的模糊C均值算法的實現具體如下:
步驟1 設定聚類個數c=2,模糊加權指數m= 2,利用最優二叉樹思想的聚類中心可以表示為V(0),設置模糊C均值收斂的條件為ε=10-5,令初始迭代次數為0。
步驟2 利用式(17)計算隸屬度矩陣U(k+1)中的每一個元素:

其中,dij為特征空間中的像素點坐標位置到聚類中心之間的特征距離[13]。
步驟3 利用式(18)計算聚類中心V(k+1)的每一個元素:


3.4 多尺度濾波及形態學運算
針對二值圖S-image1,S-image2背景以及線對中存在噪聲點的問題,利用多尺度濾波以及圖像形態學算法進行處理,其過程具體如下:
步驟1 設置3個多尺度濾波的結構元素分別為structure1,structure2,structu re3,其值如式(20)所示。依次利用這3個結構元素歷遍整個二值圖像S-image1,S-image2,將滿足以上結構元素且在對應二值圖中為1的像素點置為0。通過步驟1可以清除二值圖像背景中孤立的噪聲點。

步驟2 利用形態學閉運算[14]填充線纜內部細小的孔洞并光滑其邊緣,得到濾波后的二值圖B-image1,B-image2。
4 線纜特征修復與識別
4.1 特定區域像素點填充及圖像細化
針對線纜相互扭繞遮掩的情況,通過檢測線纜二值圖的邊緣,實現線纜部分區域修復的功能。將修復后的二值圖進行細化操作得到單像素點圖像,為下一步數據擬合提供數據集。區域修復過程具體如下:
步驟1 設線纜二值圖可分別表示為B-image1(i,j),B-image2(i,j),其中,i∈[1,height];j∈[1,w idth],分別計算圖中2條線纜的線寬,即分別計算二值圖中每一列灰度為1的像素點個數,并將計算結果存入2個大小為1×w idth數組B-w idth1,B-width2中。通過對這2個數組進行置信度分析,得出線纜1、線纜2的線寬分別為linewidth1,linew idth2。通過對B-image1(i,j),B-image2(i,j)進行邊緣定位[15],得到線纜的連續邊緣圖像B-edge1(i,j),B-edge2(i,j)。分別從線纜邊緣圖像B-edge1(i,j),B-edge2(i,j)的頂部向下搜索,若搜索到灰度值為1的點且其3×3鄰域內還可搜索到其他灰度值為1的點,將其進行標記。通過以上邊緣標記的方法可以區分線纜的上下邊緣,標記的邊緣點為上邊緣點,未標記的點為下邊緣點。
步驟2 由于線纜1、線纜2二值圖的操作步驟相同,因此在接下來的步驟中只以線纜1為例進行說明。查找數組B-w idth1中值為0的坐標位置,其分別為l1,l1+1,…,l1+l1-w idth。設修復的左起始點gapLeft=l1-1,右起始點gapRight=l1+l1-w idth+1。針對二值圖B-w idth1中缺失的部分區域,當j∈[1,gapLeft](j為二值圖B-w idth1的列坐標),使用上邊緣向下進行像素點填充的方法,其填充的線寬為linew idth1。當j∈[gapLeft,width],使用下邊緣向上進行像素點填充,其填充的線寬為linew idth1,經過以上操作得到線纜1的修復圖像。線纜2二值圖也進行相同的修復處理,得到線纜2的修復圖像。
步驟3 統計修復圖像每一列中灰度值為1的行坐標之和為total-row=[row1,row2,…,rowwidth],每一列中灰度值為1的像素點個數為total-num=[num1,num2,…,numwidth],則細化后的圖像可以表示為:

4.2 數據擬合及圖像比例尺設置
本文使用最小二乘法對線纜細化圖像進行數據擬合,其過程具體如下:
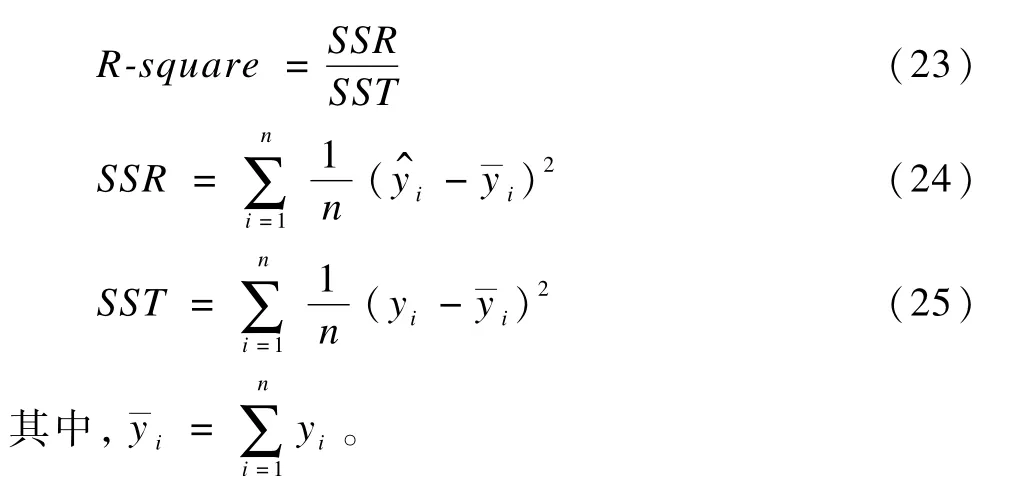
步驟1 提取線纜細化圖像中灰度值為1的像素點坐標,并對以上坐標(xi,yi)進行最小二乘擬合。通過求取擬合方程的可行解,求得可行解之間的距離即為線纜圖像節距。選取不同的擬合模型,分別求取各自模型的和方差SSE,確定系數R-square。通過以上2個模型評價參數,選取最優擬合方程。其中,SSE越接近于0以及R-square越接近于1,表明其擬合效果較好。SSE,R-square可表示為:

步驟2 提出一種線纜圖像比例尺設置的方法,其原理為:將一個五角硬幣水平置于CCD攝像頭下,設原來線纜與CCD攝像頭之間的距離為h,則用五角硬幣來替換原來線纜所處的位置,使其與CCD攝像頭之間的距離仍然為h。
由于平行光的作用五角硬幣周圍的區域要明顯亮于五角硬幣的區域,根據這一特性,可利用本文所述改進的二維Otsu算法將五角硬幣圖像分為2類,即硬幣區域與其背景區域。統計其硬幣區域所占的像素點個數為c。由于像素點呈正方形,設r為像素點的邊長,則圖像中硬幣的面積公式可以表示為S= cπr2。在實際中通過游標卡尺測得,五角硬幣的半徑為10.25 mm,則實際硬幣圖像的面積可以表示為S′=πr′2,則線纜實際繞距就可表示為:

其中,d為線纜實際繞距;distance為線纜圖像繞距,其實際繞距值單位為μm。
5 實驗結果與分析
本文實驗均在Inter酷睿i5-3210M 2.5 GHz CPU、4 GB內存的系統環境下進行,仿真工具為matlab 2012a。實驗給出6幅分辨率為768×256的線纜圖像作為樣本圖像。表1為本文提出的線纜分割算法與原始FCM算法在分割時間上的比較。其中,原始FCM算法中m=2,c=3,ε=10-5,在本文所提出的線纜分割算法中,先利用二維Otsu算法分割線纜的前景和背景再利用FCM進行聚類,其中,FCM算法中m=2,c=3,ε=10-5。從表1可知,本文提出的線纜分割算法其分割時間約為原始FCM的34.26%。

表1 線纜圖像分割算法的分割時間比較ms


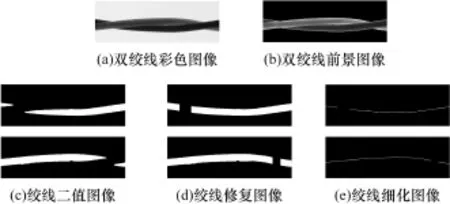
圖8 節距測量算法具體過程
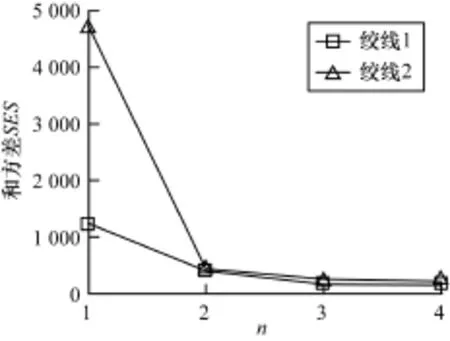
圖9 線纜細化圖像擬合參數SSE的比較
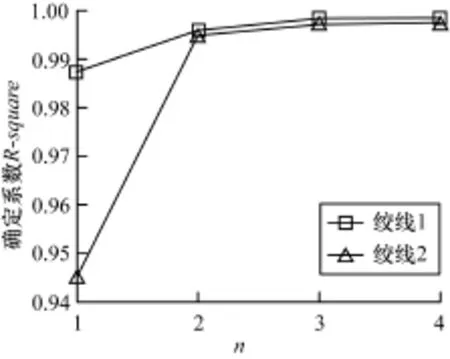
圖10 線纜細化圖像擬合參數R-square的比較
從圖11中可知,利用本文所提出的測量算法測得的節距與激光測距法測得的節距相比,兩者之間的絕對誤差約為0.75%。實驗結果表明,本文測量算法測得的節距能較好地逼近節距的真實值。
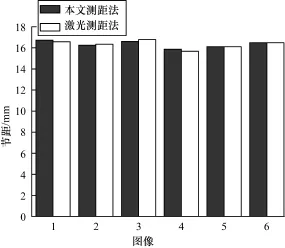
圖11 2種測量算法所得節距比較
6 結束語
本文提出一種基于圖像分析技術的節距測量算法。針對FCM聚類速度慢的缺點,給出一種結合二維Otsu的FCM聚類算法,其分割時間約為FCM算法的34.26%。針對線纜相互扭繞遮掩的問題,設計一種基于邊緣定位的像素點填充方法,用于修復缺失的線纜。通過圖像細化及數據擬合,得到2條線纜的擬合方程并求得可行解。2個可行解之間的距離即為圖像節距值,通過比例尺可將其轉換為實際節距值。
為了證明本文測量算法的可靠性,將激光測距法測得節距與本文所得節距進行比較,可以看出本文測量算法滿足準確性和實時性等要求。但當提高節距測量精度時,會增加系統的測量時間,無法同時滿足精度和速度的要求。因此,今后將利用已有的絞線中心線坐標點來預測2條絞線中心線的位置,簡化繞距的求解步驟,進一步提高測量算法的執行速度。
[1] 王 剛,石守東,林宜丙.基于圖像檢測的雙絞線繞距測量方法[J].計算機應用,2014,34(10):3014-3019.
[2] 常治學,王培昌,逄凌濱.一種無衍射激光圖像亞像素邊緣檢測方法[J].光電工程,2009,36(11):14-19.
[3] 劉 圣.工業圖像檢測系統關鍵技術的研究及應用[D].上海:上海交通大學,2007.
[4] 高緒偉,陳 果,李 允.一種基于Hough變換的損傷檢測方法[J].計算機輔助設計與圖形學學報,2009,21(2):268-274.
[5] 葛 繼.基于LOG-Zernike算子的快速圖像測量[J].光電工程,2007,34(3):63-67.
[6] 黃 斌,孫永榮,楊博文,等.迭代最小二乘橢圓擬合的錐套圖像檢測與跟蹤[J].中國圖象圖形學報,2014,19(8):1202-1209.
[7] 周海芳,趙 進.基于GPU的遙感圖像配準并行程序設計與存儲優化[J].計算機研究與發展,2012,49(S1):281-286.
[8] 曲興華,戴建芳,張福民.基于激光測距的大尺寸測量應用研究[J].儀器儀表學報,2009,30(3):481-485.
[9] Otsu N.A Threshold Selection Method from Gray-level Histogram[J].IEEE Transactions on System M an and Cybernetics,1979,9(1):62-66.
[10] Dunn JC.A Fuzzy Relative of the ISODATA Process and Its Use in Detecting Compact W ell-separated Clusters[J].Cybernetics and System s,1973,3(3):33-57.
[11] Bezdek JC.Pattern Recognition w ith Fuzzy Objective Function Algorithm s[M].New York,USA:Plenum Press,1981.
[12] 黃競偉,康立山,陳毓屏.基于遺傳算法的二叉樹畫樹算法[J].軟件學報,2000,11(8):1112-1117.
[13] 張新明,沈蘭蓀,沈 波.基于特征距離的閾值法及其在眼科圖象分割中的應用[J].中國圖象圖形學報,2001,6(2):59-63.
[14] Gonzalez R C,Woods R E.數字圖像處理[M].阮秋琦,阮宇智,譯.2版.北京:電子工業出版社,2003.
[15] 雒 濤,鄭喜鳳,丁鐵夫.改進的自適應閾值Canny邊緣檢測[J].光電工程,2009,36(11):106-111,117.
編輯 陸燕菲
Research on Cable Pitch Measurement Algorithm Based on Image Analysis
SHI Shoudong,WANG Gang
(College of Information Science and Engineering,Ningbo University,Ningbo 315211,China)
With the improvement of cable transmission speed,higher and higher demands of measurement precision of cable pitch are proposed.For this reason,this paper designs a cable pitch measurement algorithm based on image detection technique.It splits foreground and background of the cable image and uses the distributed situation of foreground pixels in feature space to achieve the Fuzzy C-mean(FCM)clustering.It obtains feasible solutions of fitting equation and the distance between adjacent feasible solutions by using specific pixel fill fitting,image thinning and data fitting based on edge detection.It converts image pitch value to an actual pitch value by the image scale.Experimental results show that the algorithm can calculate the cable pitch quickly and efficiently,and the absolute error of cable pitch between the proposed algorithm and laser ranging algorithm is about 0.75%.It has a high degree of measurement precision.
cable pitch;feature space conversion;Fuzzy C-mean(FCM)clustering;edge positioning;data fitting;laser ranging
石守東,王 剛.基于圖像分析的線纜節距測量算法研究[J].計算機工程,2015,41(11):273-279,286.
英文引用格式:Shi Shoudong,Wang Gang.Research on Cable Pitch Measurement Algorithm Based on Image Analysis[J].Computer Engineering,2015,41(11):273-279,286.
1000-3428(2015)11-0273-07
A
TP391.4
10.3969/j.issn.1000-3428.2015.11.047
浙江省重中之重學科開放基金資助項目(XKXL1514);寧波大學王寬誠教育基金資助項目。
石守東(1964-),男,副教授、博士,主研方向:圖像處理,嵌入式應用;王 剛,碩士。
2015-04-21
2015-05-26 E-m ail:shishoudong@nbu.edu.cn
猜你喜歡
建材發展導向(2021年6期)2021-06-09 05:57:08
現代國際關系(2021年2期)2021-04-13 01:59:16
今日農業(2020年17期)2020-12-15 12:34:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國外匯(2019年11期)2019-08-27 02:06:32
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
太空探索(2016年10期)2016-07-10 12:07:01
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
