輔以功能電刺激的實(shí)時(shí)步態(tài)訓(xùn)練與反饋分析系統(tǒng)
2015-11-26 02:13:44顧琳燕阮兆明賈桂鋒裘利堅(jiān)吳長(zhǎng)旺金肖青寧鋼民
中國(guó)醫(yī)療器械雜志 2015年4期
【作 者】顧琳燕,阮兆明,賈桂鋒,夏 靜,裘利堅(jiān),吳長(zhǎng)旺,金肖青,寧鋼民
1 浙江大學(xué),杭州市,310027
2 浙江醫(yī)院,杭州市,310027
3 江蘇德長(zhǎng)醫(yī)療科技有限公司,常熟市,215513
輔以功能電刺激的實(shí)時(shí)步態(tài)訓(xùn)練與反饋分析系統(tǒng)
【作者】顧琳燕1,阮兆明2,賈桂鋒1,夏靜1,裘利堅(jiān)1,吳長(zhǎng)旺3,金肖青2,寧鋼民1
1 浙江大學(xué),杭州市,310027
2 浙江醫(yī)院,杭州市,310027
3 江蘇德長(zhǎng)醫(yī)療科技有限公司,常熟市,215513
該文研究設(shè)計(jì)了同步實(shí)現(xiàn)足下垂患者步態(tài)訓(xùn)練和康復(fù)評(píng)估的綜合系統(tǒng),以解決目前存在的足下垂治療與步態(tài)分析分離的不足。系統(tǒng)采用多傳感器采集各運(yùn)動(dòng)部位的參數(shù),并設(shè)計(jì)了多重模式的功能性電刺激裝置,引入了體域網(wǎng)技術(shù)協(xié)調(diào)傳感器和刺激器的數(shù)據(jù)通訊及控制,同步實(shí)現(xiàn)步態(tài)實(shí)時(shí)分析與足下垂治療。體域網(wǎng)應(yīng)用了藍(lán)牙4.0技術(shù)以降低系統(tǒng)功耗。系統(tǒng)實(shí)現(xiàn)了治療與評(píng)估的同步,能夠?qū)崟r(shí)采集并分析訓(xùn)練時(shí)踝、膝、髖等部位運(yùn)動(dòng)參數(shù),并同時(shí)對(duì)患病部位進(jìn)行功能性電刺激治療。
足下垂步態(tài)分析;體域網(wǎng);功能電刺激;低功耗
0 引言
步態(tài)是人類步行的行為特征,與人類的行為習(xí)慣、年齡、性別等多種因素有關(guān),同時(shí)也受到人體自身疾病的影響[1]。步行的控制包括了中樞命令、身體平衡及協(xié)調(diào)控制,以及下肢各關(guān)節(jié)和肌肉的協(xié)同運(yùn)作,過程非常復(fù)雜,而其中任何一個(gè)環(huán)節(jié)的失調(diào)都可能影響步行與步態(tài)。
腦卒中、腦外傷和脊髓損傷等中樞神經(jīng)損傷會(huì)造成足下垂,主要表現(xiàn)為踝關(guān)節(jié)不能背屈[2],并常與足內(nèi)翻、足外翻同時(shí)存在。這些運(yùn)動(dòng)功能性障礙使患者在步行時(shí)出現(xiàn)異常步態(tài),表現(xiàn)為下肢的步行能力較弱,穩(wěn)定性較差[3]。而下肢的步行能力影響著患者的獨(dú)立生活能力,因而,對(duì)于足下垂的治療是至關(guān)重要的。足下垂常規(guī)療法主要有:足部溫?zé)岑煼ā⒖祻?fù)鍛煉、針刺與按摩[4]、佩戴支具[5]、手術(shù)治療以及功能性電刺激[6]等。功能性電刺激(Functional Electrical Stimulation,F(xiàn)ES)屬于神經(jīng)肌肉刺激,是利用一定強(qiáng)度的低頻脈沖電流,通過預(yù)先設(shè)定的程序來刺激一組或者多組肌肉。
步態(tài)分析是指測(cè)量和描述運(yùn)動(dòng)中人體的骨骼肌肉功能并進(jìn)行定量評(píng)估[7],旨在通過生物力學(xué)和運(yùn)動(dòng)學(xué)方法,揭示步態(tài)異常的關(guān)鍵環(huán)節(jié)和影響因素,從而指導(dǎo)康復(fù)評(píng)估和治療,有助于臨床診斷和療效評(píng)估等[1]。三維步態(tài)分析是一種新興的步態(tài)分析手段,具有客觀、定量、準(zhǔn)確的特點(diǎn),因而正被逐步廣泛的用于骨科康復(fù)和神經(jīng)康復(fù)等領(lǐng)域。
將足下垂治療與步態(tài)分析結(jié)合,可以動(dòng)態(tài)評(píng)估療效,實(shí)時(shí)調(diào)整治療策略,從而提高康復(fù)質(zhì)量。然而,現(xiàn)有研究存在治療與步態(tài)分析分離的缺陷,即使在治療時(shí)同步記錄患者步行參數(shù),但治療裝置和檢測(cè)裝置往往相互獨(dú)立,有各自的控制系統(tǒng)及通訊系統(tǒng),因此難以依據(jù)步態(tài)分析結(jié)果即時(shí)調(diào)整治療。
針對(duì)以上問題,我們提出了基于體域網(wǎng)(Body Area Network,BAN)[8-9]技術(shù)同步足下垂治療與步態(tài)評(píng)估的方案,可實(shí)時(shí)同步完成足下垂治療與步態(tài)分析等功能。體域網(wǎng)由人體傳感器及其通信網(wǎng)絡(luò)構(gòu)成[8],提供了一個(gè)集成硬件、軟件和無線通信技術(shù)的泛在計(jì)算機(jī)平臺(tái),主要應(yīng)用于綜合生理信號(hào)檢測(cè)。本研究應(yīng)用體域網(wǎng)技術(shù)集成了功能電刺激模塊、步態(tài)檢測(cè)模塊、控制與通信模塊,實(shí)現(xiàn)了附著于人體的各功能模塊間的相互信息交換[10],以及體域網(wǎng)與外部計(jì)算機(jī)的通信管理。
1 系統(tǒng)設(shè)計(jì)
1.1三維步態(tài)分析系統(tǒng)整體設(shè)計(jì)結(jié)構(gòu)
系統(tǒng)主要應(yīng)用于醫(yī)院和康復(fù)機(jī)構(gòu),對(duì)腓總神經(jīng)及脛骨前肌進(jìn)行功能性電刺激治療足下垂(足內(nèi)翻、足外翻,同時(shí)也可刺激股四頭肌、上肢肌肉等以輔助膝關(guān)節(jié)和手的協(xié)調(diào)運(yùn)動(dòng)幫助患者行走訓(xùn)練),并檢測(cè)患者步行時(shí)的步態(tài)參數(shù)從而對(duì)訓(xùn)練效果進(jìn)行反饋。系統(tǒng)基于體域網(wǎng)設(shè)計(jì),在硬件層面,依據(jù)體域網(wǎng)強(qiáng)調(diào)身體傳感器的輕量、無創(chuàng)、無線通信和低功耗[11],低功耗是主要的技術(shù)要求[12]。系統(tǒng)的硬件部分主要包括,由步態(tài)觸發(fā)的功能性電刺激器、三維運(yùn)動(dòng)傳感器,以及下位機(jī)控制中心編程器和計(jì)算機(jī)。系統(tǒng)結(jié)構(gòu)如圖1所示。
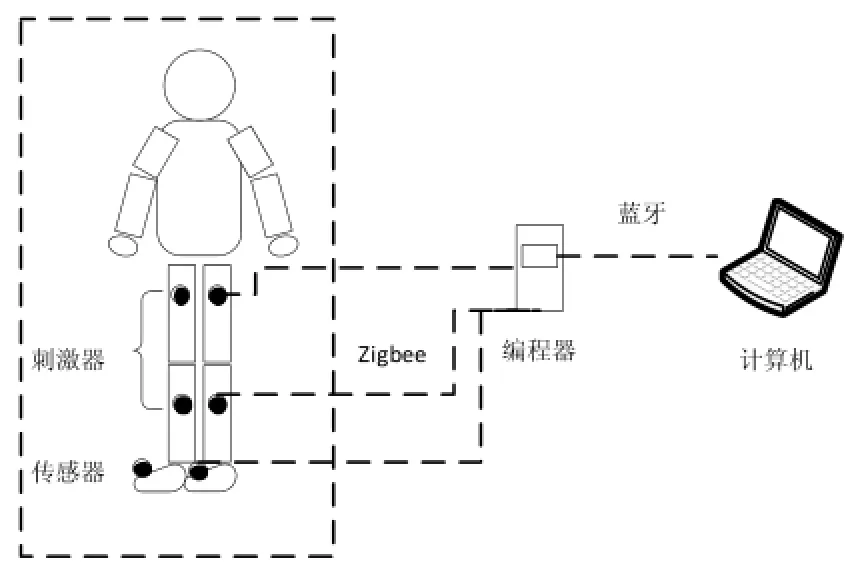
圖1 步態(tài)系統(tǒng)結(jié)構(gòu)Fig.1 Structure of gait system
體域網(wǎng)通信可從廣義上分為三個(gè)部分:Intra-BAN,Inter-BAN以及Beyond-BAN[13]。Intra-BAN主要指人體周圍2 m范圍內(nèi)的硬件部分通信[13],具體包括:①體表所有傳感器之間的通信;②體表傳感器與外部處理器之間的通信。Inter-BAN是指人體傳感器或處理中心與計(jì)算機(jī)等其他設(shè)備間的通信。Beyond-BAN是指計(jì)算機(jī)互聯(lián)網(wǎng)通信。系統(tǒng)目前未涉及數(shù)據(jù)上傳,因而分為兩個(gè)部分,Intra-BAN以及Inter-BAN。Intra-BAN保證了附著于人體的各功能模塊間的相互信息交換,利用處理中心編程器方便了管理,使得各獨(dú)立模塊與后續(xù)模塊通信優(yōu)化。Inter-BAN則用于實(shí)現(xiàn)體域網(wǎng)與外部計(jì)算機(jī)的通信管理。
1.2佩戴式硬件系統(tǒng)
在體域網(wǎng)的定義中,體域網(wǎng)的節(jié)點(diǎn)主要是指?jìng)鞲衅鳎窃诒驹O(shè)計(jì)中,人體體表不僅僅只放置了傳感器,還存在促動(dòng)器[9],促動(dòng)器根據(jù)檢測(cè)的數(shù)據(jù)對(duì)人體進(jìn)行反饋刺激。促動(dòng)器在本系統(tǒng)中即刺激器。體域網(wǎng)節(jié)點(diǎn)通過編程器進(jìn)行管理控制。
基層城關(guān)鎮(zhèn)站(辦)所在中國(guó)行政體制當(dāng)中屬于股級(jí)建制,站(辦)所長(zhǎng)相當(dāng)于股長(zhǎng)。股長(zhǎng)還是科員,只是資歷較老,工作經(jīng)驗(yàn)豐富,同時(shí)是基層站(辦)所的直接負(fù)責(zé)人,掌握一定的資源與權(quán)力。站(辦)所長(zhǎng)的管理方式直接決定著基層干部職工做事的積極性,其中最忌諱的就是獨(dú)裁式管理,獨(dú)斷專行、一人獨(dú)大。反之,“要求別人做的自己首先要做到,要求別人不做的自己堅(jiān)決不做”[9]12-15,不能妄自尊大但也不能放任自流,遇事應(yīng)當(dāng)民主管理,共同協(xié)商。
系統(tǒng)傳感器采用加速度傳感器和陀螺儀、磁力計(jì)的結(jié)合,因?yàn)閱为?dú)的陀螺儀與加速度傳感器有時(shí)不能得到最優(yōu)姿態(tài)角度。評(píng)估足下垂時(shí),傳感器主要放置在足背部。采集運(yùn)動(dòng)中足背部在三維方向的運(yùn)動(dòng)參數(shù),可計(jì)算背屈角度,內(nèi)、外翻角度和內(nèi)、外八字角度。在開始測(cè)試前,傳感器采集患者的標(biāo)準(zhǔn)體位下各參數(shù)作為參考值,通過運(yùn)動(dòng)過程中采集到的各值與參考值的差值計(jì)算出各參數(shù)值。
系統(tǒng)刺激器主要由兩部分構(gòu)成:電流輸出控制裝置和電流傳輸電極。電流輸出控制裝置包括電刺激模塊和觸發(fā)控制模塊。本研究中,在大腿和小腿各放置了電刺激模塊。每個(gè)電刺激模塊各自可連接多個(gè)電極,形成電流回路。
觸發(fā)控制模塊檢測(cè)到患者患腿邁步時(shí),輸出觸發(fā)信號(hào)給腿部電刺激模塊,腿部電刺激模塊輸出電刺激至腿部電極,對(duì)有功能障礙肌群和神經(jīng)進(jìn)行電刺激,增強(qiáng)和改善肌肉活動(dòng)能力,幫助患者進(jìn)行運(yùn)動(dòng)。觸發(fā)控制模塊在檢測(cè)到患腿停止邁步時(shí),輸出刺激停止信號(hào)給腿部電刺激模塊,腿部電刺激模塊停止產(chǎn)生電刺激。大腿部電刺激模塊先輸出使膝蓋彎曲的大腿背面電刺激,再輸出使膝蓋伸展邁步的大腿正面電刺激。刺激器的電流大小經(jīng)由編程器控制,肌群功能相對(duì)較弱時(shí)可增大刺激電流。
編程器是本系統(tǒng)的一個(gè)數(shù)據(jù)交換中心和控制節(jié)點(diǎn),向下控制刺激器與傳感器并接收體域網(wǎng)各節(jié)點(diǎn)的數(shù)據(jù),向上通過藍(lán)牙與計(jì)算機(jī)進(jìn)行通信。通過編程器可選擇不同通道傳感器和刺激器,并設(shè)置刺激器的刺激強(qiáng)度。一個(gè)編程器可與多個(gè)傳感器與刺激器進(jìn)行通信。
1.3體域網(wǎng)通信
系統(tǒng)通信包括兩個(gè)部分,Intra-BAN通信和Inter-BAN通信。Intra-BAN的通信方式主要有:有線通信、紫峰通信等。系統(tǒng)的Intra-BAN主要采用紫峰通信。紫峰技術(shù)是目前傳感器網(wǎng)絡(luò)之間的主流通信。Inter-BAN通信即編程器與計(jì)算機(jī)的通信,強(qiáng)調(diào)通信的低功耗以及數(shù)據(jù)傳輸?shù)目煽啃裕蚨覀儾捎玫凸乃{(lán)牙4.0。
編程器端使用低功耗藍(lán)牙4.0,計(jì)算機(jī)端使用藍(lán)牙Dongle與之通信。藍(lán)牙Dongle利用USB無線連接,簡(jiǎn)單快速地使計(jì)算機(jī)增加藍(lán)牙4.0模塊。在計(jì)算機(jī)內(nèi)部,藍(lán)牙Dongle映射為一個(gè)串口,計(jì)算機(jī)通過對(duì)串口進(jìn)行操作來控制藍(lán)牙Dongle,并讀取藍(lán)牙Dongle所接收數(shù)據(jù)。編程器與計(jì)算機(jī)之間的數(shù)據(jù)通信,即藍(lán)牙4.0的通信,最快可在3毫秒內(nèi)完成連接并開始傳輸數(shù)據(jù)。
本系統(tǒng)的通信指令主要根據(jù)藍(lán)牙4.0的高效通信流程建立,連接過程必須經(jīng)過“握手操作”。首先計(jì)算機(jī)上層軟件部分向串口發(fā)送查詢命令,查詢藍(lán)牙Dongle狀態(tài),當(dāng)Dongle狀態(tài)處于“OK”時(shí),開始掃描請(qǐng)求,并返回所有可用設(shè)備的名稱地址和個(gè)數(shù),然后對(duì)可用設(shè)備進(jìn)行選擇連接,連接成功后返回已連接狀態(tài)。
藍(lán)牙傳輸遵從自定義協(xié)議。協(xié)議由校驗(yàn)頭、通道號(hào)、傳感器數(shù)據(jù)、校驗(yàn)尾組成。校驗(yàn)頭與校驗(yàn)尾用于標(biāo)記一幀完整數(shù)據(jù),通道號(hào)表征所傳感器編號(hào),傳感器數(shù)據(jù)包括XYZ三個(gè)參數(shù)。
1.4軟件系統(tǒng)設(shè)計(jì)
計(jì)算機(jī)上位軟件主要接收并處理來自體域網(wǎng)的數(shù)據(jù)。包括各參數(shù)波形的實(shí)時(shí)顯示以及數(shù)值實(shí)時(shí)計(jì)算等。同時(shí)可查看患者歷史記錄并生成報(bào)告。
軟件系統(tǒng)主要分為三個(gè)部分,分別為:步態(tài)實(shí)時(shí)分析部分、歷史記錄部分和系統(tǒng)設(shè)置部分。其中步態(tài)實(shí)時(shí)分析部分與歷史記錄部分的主要流程如圖2所示。
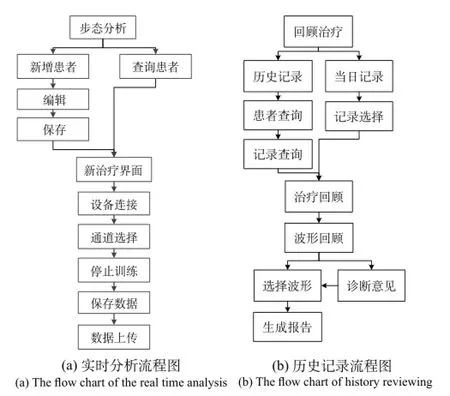
圖2 步態(tài)系統(tǒng)流程圖。Fig.2 The flow chart of gait training system.
在實(shí)時(shí)步態(tài)分析與歷史記錄中,軟件系統(tǒng)主要包含以下參數(shù):左、右踝的背屈趾屈、內(nèi)翻外翻、內(nèi)八外八角度,左、右髖和膝的外內(nèi)、前后、上下角度,左右腳的站立相和擺動(dòng)相時(shí)間,起步角、落地角以及跨步均勻度和左右均勻度等。實(shí)時(shí)步態(tài)分析過程中,系統(tǒng)可同時(shí)顯示六個(gè)通道數(shù)據(jù)波形。
步態(tài)軟件系統(tǒng)管理部分主要控制管理藍(lán)牙Dongle,通過指令集操作來改變藍(lán)牙工作狀態(tài)。
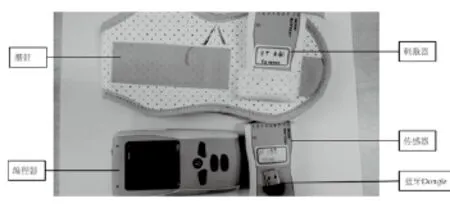
圖3 系統(tǒng)實(shí)樣Fig.3 The prototype
2 系統(tǒng)實(shí)現(xiàn)
基于上述原則,本研究設(shè)計(jì)了完整的三維步態(tài)訓(xùn)練系統(tǒng),硬件部分包括傳感器、刺激器、編程器及基于體域網(wǎng)的通信機(jī)制。由江蘇德長(zhǎng)醫(yī)療科技有限公司最終研制的系統(tǒng)實(shí)樣如圖3所示,表1給出了系統(tǒng)硬件部分主要性能指標(biāo)。在上位機(jī)開發(fā)了較為完善的界面,可對(duì)下位機(jī)進(jìn)行控制,以功能電刺激方式幫助患者進(jìn)行步態(tài)訓(xùn)練,可記錄患者在步態(tài)訓(xùn)練過程中的參數(shù),如足背屈角度、足內(nèi)翻角度、足外翻角度、起步角度、落地角度、跨步均勻度、左右均勻度、站立時(shí)間、擺動(dòng)時(shí)間和總步數(shù)等。并能實(shí)時(shí)顯示左、右踝的背屈趾屈、內(nèi)翻外翻、內(nèi)八外八角度波形,左、右髖的外內(nèi)、前后、上下角度波形,左、右膝的外內(nèi)、前后、上下角度波形等。醫(yī)護(hù)人員可對(duì)記錄的信號(hào)和參數(shù)進(jìn)行回放和分析,對(duì)訓(xùn)練效果進(jìn)行評(píng)價(jià)并及時(shí)調(diào)整治療策略。軟件界面如圖4所示。
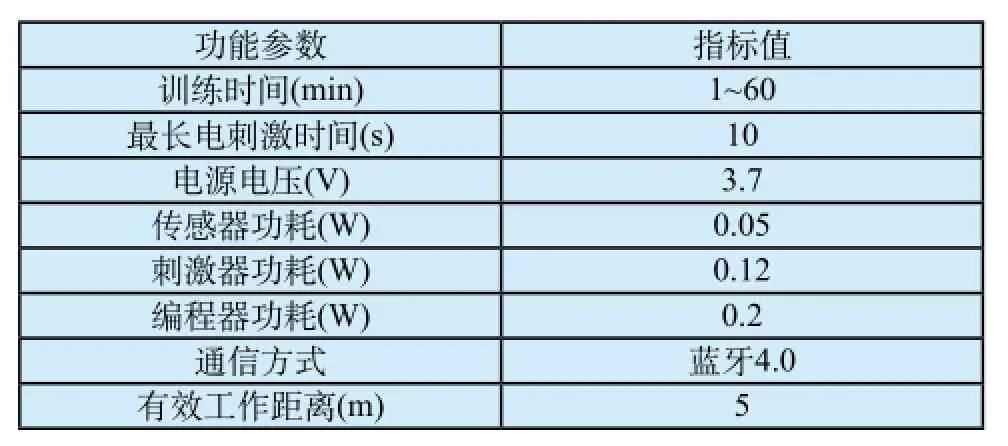
表1 系統(tǒng)主要性能指標(biāo)Tab.1 The main properties index of the system
3 結(jié)論
本研究設(shè)計(jì)的一種基于體域網(wǎng)的帶有功能性電刺激的足下垂治療和步態(tài)分析系統(tǒng),具有低功耗、治療與評(píng)估實(shí)時(shí)同步等特點(diǎn),為足下垂的康復(fù)治療和步態(tài)分析提供了新的方法。今后,結(jié)合足底壓力測(cè)試等技術(shù),該系統(tǒng)可對(duì)足下垂和偏癱患者的康復(fù)狀況進(jìn)行更為全面的評(píng)估,造福廣大患者。
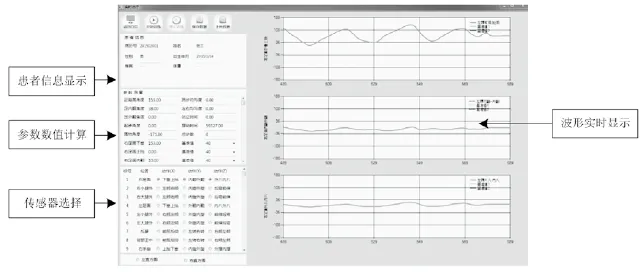
圖4 軟件主要界面Fig.4 The main interface of the software system
[1] 勵(lì)建安, 孟殿懷. 步態(tài)分析的臨床應(yīng)用[J]. 中華物理醫(yī)學(xué)與康復(fù)雜志, 2006. 28(7): 500-503.
[2] 黃怡, 萬新爐, 潘翠環(huán), 等. 功能性電刺激對(duì)腦卒中足下垂患者步行能力的影響[J]. 神經(jīng)損傷與功能重建, 2014. 9(03): 231-232, 248.
[3] 許光旭, 顧紹欽, 孟殿懷, 等.下肢痙攣偏癱患者的步行效率[J].中國(guó)組織工程研究與臨床康復(fù), 2009, 13(11): 2166-2169.
[4] 吳運(yùn)景, 劉世文, 藺勇. 腦卒中后足下垂的治療方法[J]. 吉林醫(yī)學(xué), 2007, 28(2): 159-161.
[5] Ramdharry GM, Day BL, Reilly MM, et al. Foot drop splints improve proximal as well as distal leg control during gait in Charcot‐Marie‐Tooth Disease[J]. Muscl Nerv, 2012, 46(4): 512-519.
[6] Bogataj U, Gros N, Kljajic M, et al. The rehabilitation of gait in patients with hemiplegia: A comparison between conventional therapy and multichannel functional electrical stimulation therapy[J]. Phys Therapy, 1995, 75(6): 490-502.
[7] Shaban HA, El-Nasr MA, Buehrer RM. Toward a highly accurate ambulatory system for clinical gait analysis via UWB radios[J]. IEEE Trans Inform Tech Biomed, 2010, 14(2): 284-291.
[8] Ouvry L, Zhen B, Cotton S. Body area networks and technologies[J]. Ann Telecommun-annales des télécommunications, 2011, 66(3-4): 137-138.
[9] Latré B, Braem B, Moerman I, et al. A survey on wireless body area networks[J]. Wireless Networks, 2011 17(1): 1-18.
[10] Akyildiz IF, Su W, Sankarasubramaniam Y, et al. Wireless sensor networks: a survey[J]. Computer Networks, 2002, 38(4): 393-422.
[11] Reichman A. Standardization of body area networks[C]. IEEE COMCAS, 2009, 1-4.
[12] Patel M,Wang J, Applications, challenges, and prospective in emerging body area networking technologies[J]. IEEE Wireless Communications, 2010, 17(1): 80-88.
[13] Chen M, Gonzalez S, Vasilakos A, et al. Body area networks: a survey[J]. Mobile Networks Appl, 2011, 16(2): 171-193.
[14] Yu B, Xu L, Li Y. Bluetooth low energy (BLE) based mobile electrocardiogram monitoring system[C]. IEEE ICIA, 2012. 763-767.
[15] Puccinelli D, Haenggi M. Wireless sensor networks: applications and challenges of ubiquitous sensing[J]. IEEE Circuit Syst Mag, 2005, 5(3): 19-31.
Real-time Gait Training System with Embedded Functional Electrical Stimulation
【 Writers 】GU Linyan1, RUAN Zhaomin2, JIA Guifeng1, XIA Jing1, QIU Lijian1, WU Changwang3, JIN Xiaoqing2, NING Gangmin1
1 Zhejiang University, Hangzhou, 310027
2 Zhejiang Hospital, Hangzhou, 310027
3 Jiangsu DeChang Medical Science Co. Ltd., Changshu, 215513
To solve the problem that mostly gait analysis is independent from the treatment, this work proposes a system that integrates the functions of gait training and assessment for foot drop treatment. The system uses a set of sensors to collect gait parameters and designes multi-mode functional electrical stimulators as actuator. Body area network technology is introduced to coordinate the data communication and execution of the sensors and stimulators, synchronize the gait analysis and foot drop treatment. Bluetooth 4.0 is applied to low the power consumption of the system. The system realizes the synchronization of treatment and gait analysis. It is able to acquire and analyze the dynamic parameters of ankle, knee and hip in real-time, and treat patients by guiding functional electrical stimulation delivery to the specific body locations of patients.
gait analysis of foot drop, body area network, functional electrical stimulation, low-power consumption
TP242
A
10.3969/j.issn.1671-7104.2015.04.005
1671-7104(2015)04-0253-04
2015-05-04
浙江省重大專項(xiàng)(2013C03049-2);科技部國(guó)際合作項(xiàng)目(2014DFT30100)
顧琳燕,E-mail: gulinyan5@163.com
寧鋼民,博士、教授,E-mail: gmning@zju.edu.cn
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年18期)2018-11-14 01:48:24
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22