感應(yīng)電機電源切換中殘壓和電壓差的研究及最優(yōu)切換策略
2015-11-25 09:31:18崔學(xué)深張自力李和明張曉東
電工技術(shù)學(xué)報 2015年2期
崔學(xué)深 張自力 李和明 賈 英 張曉東
(華北電力大學(xué)電氣與電子工程學(xué)院 北京 102206)
1 引言
三相感應(yīng)電機在各種工業(yè)生產(chǎn)中得到了廣泛的應(yīng)用,常被用于驅(qū)動水泵、風(fēng)機等生產(chǎn)機械,容量從幾十瓦到幾萬千瓦不等。作為動力輸出設(shè)備,其能否持續(xù)穩(wěn)定運行往往影響著整個生產(chǎn)。感應(yīng)電機突然斷電,可能導(dǎo)致其驅(qū)動機械中斷運行,危及其所在生產(chǎn)線的安全穩(wěn)定,對一些不允許運行中斷的生產(chǎn)來說,可能造成相當(dāng)可觀的損失。因此,重要生產(chǎn)均設(shè)有必要的備用電源,一旦供電系統(tǒng)出現(xiàn)暫時性故障或者線路定期檢修等,就可以在短時間內(nèi)將感應(yīng)電機切換到備用電源上,從而保證了感應(yīng)電機的不中斷供電和重要生產(chǎn)線的持續(xù)運行。一般地,備用電源電壓在幅值、頻率上都與主電源電壓相差不大,但其可能具有各種不同的初相角,基于此,本文僅討論主備電源初相角不同時的感應(yīng)電機電源切換問題,為描述方便,將幅值、頻率均與主電源電壓相同但具有不同初相角的備用電源簡稱為“不同備用電源”。
然而,當(dāng)感應(yīng)電機斷電時間較長或者備用電源電壓相位與主電源相差較大時,在電源切換中會出現(xiàn)很大的定子沖擊電流和沖擊轉(zhuǎn)矩[1-4],糟糕情況下,沖擊電流可能高達(dá)額定電流的20 倍。較大的沖擊電流會造成電網(wǎng)母線電壓驟降,嚴(yán)重影響接在同一電網(wǎng)母線上其他負(fù)載的穩(wěn)定運行(在艦船上尤為突出),此外,瞬態(tài)沖擊轉(zhuǎn)矩和電流也可能對電機的轉(zhuǎn)軸和繞組造成很大的損傷。已有文獻研究表明,解決感應(yīng)電機電源切換沖擊問題的有效方式主要有快速切換、同期切換和殘壓切換三種[5],然而哪種切換方式最有利于抑制沖擊問題,在什么時刻進行電源切換最有利,以往文獻對此討論較少,大多都是定性分析。因此,為了準(zhǔn)確確定最優(yōu)電源切換方式和最有利切換時刻,有必要進一步定量研究電源切換中感應(yīng)電機定子殘壓及其與不同備用電源電壓間的電壓差和相角差特性。
有關(guān)感應(yīng)電機斷電過程和電源切換的研究,已有許多文獻做了大量的工作,文獻[6]認(rèn)為由于電弧熄滅過程錯綜復(fù)雜,感應(yīng)電機的斷電過程可以有兩種不同的處理辦法,一種觀點認(rèn)為定子三相繞組與電源是同時斷開的,另一種觀點認(rèn)為定子三相繞組不是同時斷開的,并使用數(shù)值計算方法對斷電過程和重合閘過程進行分析計算;文獻[7,8]采用穩(wěn)態(tài)等效電路來近似描述感應(yīng)電機失電殘壓,初步討論了殘壓的衰減規(guī)律以及其與電網(wǎng)電壓之間的相位差問題,并介紹了幾種常見的電源切換方式;文獻[9-11]基于感應(yīng)電機在ABC 或dq 坐標(biāo)系統(tǒng)中的數(shù)學(xué)模型,對其失電殘壓和重合閘過程進行了分析和數(shù)值計算;文獻[12]討論了重要工業(yè)設(shè)備的自動母線切換控制系統(tǒng),研究了電機斷電后殘壓的幅值特性和母線切換方法;文獻[13,14]假設(shè)電機斷電后定子三相電流立即為零,使用空間矢量解析推導(dǎo)出定子殘壓的表達(dá)式,并簡單討論了殘壓對重合閘的影響。然而,這些文獻在討論電源切換中感應(yīng)電機斷電過程時,大都是假設(shè)斷電后定子電流立刻為零,電機直接進入轉(zhuǎn)子自由運動過程,與實際有所差別,影響定子殘壓的準(zhǔn)確定量計算,此外有關(guān)定子殘壓與不同備用電源電壓間的電壓差和相角差特性研究較少。
基于以上內(nèi)容,本文首先討論感應(yīng)電機與電源斷開過程的處理方法,并根據(jù)斷電過程中的定子電流實測波形,發(fā)現(xiàn)應(yīng)該將電機斷電過程分成定子兩相不對稱瞬態(tài)和轉(zhuǎn)子自由運動兩個階段分別進行研究,才能與實際吻合;然后在不考慮電機轉(zhuǎn)速變化下,使用感應(yīng)電機對稱、不對稱空間矢量瞬態(tài)模型[15],對其斷電過程兩個階段分別進行深入的解析推導(dǎo)和計算,計算研究感應(yīng)電機從主電源斷電后定子殘壓的變化規(guī)律;其次,在假設(shè)備用電源電壓幅值、頻率與主電源相同條件下,解析研究具有各種不同初相角的備用電源電壓與定子殘壓間的電壓差和相角差特性,據(jù)此確定最優(yōu)電源切換方式,并在考慮開關(guān)動作時間下準(zhǔn)確確定最有利切換時刻,最后對其進行實驗驗證分析。
2 定子繞組斷電過程的處理方法
由于所用開關(guān)的不同和電弧熄滅過程的復(fù)雜性,三相感應(yīng)電機的斷電過程常有以下三種處理方法:
(1)認(rèn)為定子三相繞組與電源是同時斷開的,也就是說,開關(guān)斷開瞬間,定子三相電流立即同時變?yōu)榱鉡6,8,13],這種處理方法最簡單,但不夠準(zhǔn)確,與實際有所差別。
(2)認(rèn)為開關(guān)斷開時,定子三相電流不能馬上減到零,并假設(shè)每個電流是按指數(shù)規(guī)律進行衰減到零的[15],這種方法實用性比較差,因為衰減時間常數(shù)難以確定。
(3)認(rèn)為開關(guān)斷開后,定子某一相繞組在其電流過零點時首先關(guān)斷,余下兩相繞組緊接著在其電流過零點時再同時關(guān)斷[6]。
常用的開關(guān)有斷路器、接觸器、晶閘管和固態(tài)復(fù)合開關(guān)[17]等,其中采用DZ47—63 斷路器將主電源從三種實驗電機定子端切除,得到的定子電流實測波形如圖1 所示。圖1 中三種電動機的斷電時刻是不同的,但是其斷電過程呈現(xiàn)的現(xiàn)象是相同的,均可分為短暫的兩相不對稱瞬態(tài)和轉(zhuǎn)子自由運動過程。此外,從圖1 中還能看出,圖1a、1b 兩種情況中的一相繞組被斷開近似發(fā)生在該相繞組電流過零點處,而圖1c 中先被斷開的繞組電流并不為零,但其斷電過程出現(xiàn)的現(xiàn)象仍然和前者相同。由此可見,使用這種斷路器控制電動機斷電時,其實際斷電過程與第三種處理方法最為吻合。實際上,使用晶閘管或固態(tài)復(fù)合開關(guān)切除電動機電源時其斷電結(jié)果更是如此。基于這一事實,為了更加準(zhǔn)確地定量計算感應(yīng)電機斷電過程中的定子殘壓及其與不同備用電源間的電壓差和相角差特性,進而準(zhǔn)確確定最優(yōu)電源切換方式和最有利切換時刻,本文采用方法三來深入研究感應(yīng)電機的斷電過程。

圖1 定子斷電過程中電流的實測波形Fig.1 Test waveforms of currents during the stator power-off process
考慮到感應(yīng)電機和電源均是三相對稱的,故斷路器觸頭打開后,具體哪一相定子繞組先斷開主要受斷電時刻的影響,對電機斷電過程的定量研究沒有影響,在這里,以定子C 相繞組先過零關(guān)斷為例,即圖1a 所示的情況,顯然可以將其斷電過程分為兩個階段分別進行研究:第一個階段從開關(guān)斷開后定子C 相繞組電流過零關(guān)斷時刻t0至余下兩相繞組同時過零關(guān)斷瞬間t1,此階段較為短暫,為定子兩相不對稱瞬態(tài)過程;第二個階段從時刻t1至感應(yīng)電機進行電源切換瞬間t2,該階段為轉(zhuǎn)子自由運動過程。于是定子斷電過程中感應(yīng)電機的運行狀態(tài)可用圖2來展示。

圖2 斷電前后感應(yīng)電機運行狀態(tài)示意圖Fig.2 The schematic diagram of operation states of induction motor before and after the power off
3 感應(yīng)電機對稱及不對稱空間矢量模型
根據(jù)前面分析可知,電源切換中三相感應(yīng)電機的斷電過程可分為定子兩相不對稱瞬態(tài)和轉(zhuǎn)子自由運動兩個階段,以圖1a 所示情況為例,結(jié)合圖2可知,在對該過程進行定量解析計算時,需要用到感應(yīng)電機的三相對稱、兩相不對稱以及定子不接電源時的數(shù)學(xué)模型。
由文獻[15,20]可以發(fā)現(xiàn),對于恒速運行下的感應(yīng)電機,使用空間矢量代替?zhèn)鹘y(tǒng)變量來建立感應(yīng)電機對稱、不對稱模型時,能夠有效降低感應(yīng)電機對稱、不對稱模型階數(shù),這種模型階數(shù)的減少能夠大量簡化電機模型的解析求解,特別適合解析研究感應(yīng)電機斷電后的短暫過渡過程。其中,在定子復(fù)坐標(biāo)系中,感應(yīng)電機三相對稱運行時的空間矢量數(shù)學(xué)模為[18-20]

由文獻[15]可知,當(dāng)感應(yīng)電機斷電后定子C 相繞組先過零關(guān)斷時,其定子A、B 兩相連接著電源時的兩相不對稱空間矢量瞬態(tài)模型[15]為
式中 us——施加在定子端上的三相對稱電源電壓空間矢量;
uAB——電源A、B 兩相間的線電壓;
is,ir——定、轉(zhuǎn)子電流空間矢量;
α=exp(j·2π/3),其余參數(shù)和變量符號含義同文獻[15]。
對于斷電后處于階段二的感應(yīng)電機而言,其定子繞組與電源完全斷開,定子電流為零,轉(zhuǎn)子電流不為零,轉(zhuǎn)子在轉(zhuǎn)動慣性和負(fù)載作用下繼續(xù)旋轉(zhuǎn)并不斷減速,轉(zhuǎn)子電阻使得轉(zhuǎn)子電流不斷衰減,此時感應(yīng)電機的數(shù)學(xué)模型為

這時轉(zhuǎn)子電流產(chǎn)生的磁場在定子繞組中所感應(yīng)出的定子殘壓為

4 定子殘壓和磁鏈的解析推導(dǎo)
4.1 定子AB 兩相不對稱瞬態(tài)的解析
假設(shè)三相對稱正弦主電源滿足
三相感應(yīng)電機在 t=0 時刻接上主電源直接起動,至斷電時刻t0(見圖1a),該過程中電機處于對稱運行狀態(tài)。由式(1)和式(5)可以很容易地求出t0時刻瞬間前的定、轉(zhuǎn)子電流空間矢量值。又?jǐn)嗦菲鞯乳_關(guān)切斷電源時假設(shè)定子繞組過零關(guān)斷,故可近似認(rèn)為C 相斷開前后定、轉(zhuǎn)子電流保持不變,于是就確定了C 相斷開后的定、轉(zhuǎn)子電流空間矢量初值,分別假設(shè)為is0和ir0,再由ir0可以得到轉(zhuǎn)子電流空間矢量的共軛分量初值。
此外,由式(5)可得,施加在電機定子A、B相間的線電壓為

根據(jù)上述分析可知,斷路器斷開使得定子C 相繞組在時刻t0首先過零關(guān)斷,這時感應(yīng)電機定子A、B 兩相繞組出線端仍與主電源相連接,感應(yīng)電機從對稱運行過渡到兩相不對稱瞬態(tài),這時電機的運行行為可以用式(2)所述的空間矢量瞬態(tài)數(shù)學(xué)模型來定量描述。對重要工業(yè)應(yīng)用而言,要求電機斷電后迅速進行電源切換,因此斷電過程時間短暫,而兩相不對稱運行階段時間更加短暫,大約1/4 工頻周期,故可認(rèn)為斷電后電機兩相不對稱運行過程中的轉(zhuǎn)速ωr幾乎不變。
結(jié)合式(6),對式(2)進行拉普拉斯變換,可得到一組線性常系數(shù)方程組,對其進行求解,求解過程同文獻[15]中的案例分析,可以得到定、轉(zhuǎn)子電流空間矢量的頻域表達(dá)式,進而根據(jù)定子磁鏈和電流之間的關(guān)系式[19,20]為

可求出定子磁鏈的頻域表達(dá)式為


的特征根。對實驗電動機而言,該方程有一個實數(shù)根和兩個共軛復(fù)根[15,21],分別記為

對式(8)進行拉普拉斯反變換,可求出定子磁鏈空間矢量的時域表達(dá)式為
再根據(jù)法拉第電磁感應(yīng)定律,可以得到電機斷電后階段一中的定子電動勢空間矢量表達(dá)式為
以一臺2.2kW 籠型感應(yīng)電機為實驗電機來進行研究,其定子繞組星形聯(lián)結(jié)、無中線,主要參數(shù)為:UN=380V,IN=4.8A,Rs=6.928Ω,Rr′=7.369Ω,xsl=14.13Ω,Rm=36.25Ω,xm=486.7Ω,p=2,J=0.009kg·m2,F(xiàn)=0.001N·m·s。
對空載實驗電機而言,定子C 相繞組電流過零關(guān)斷后,電機從對稱穩(wěn)態(tài)運行過渡到兩相不對稱瞬態(tài),根據(jù)上述解析結(jié)果進行計算,可得到極坐標(biāo)系中定子磁鏈和電動勢空間矢量軌跡,如圖3 所示,圖中紅色實線為斷電前電機處于對稱穩(wěn)態(tài)運行過程中的變量空間矢量軌跡,藍(lán)色虛線為斷電后電機處于階段一(即兩相不對稱瞬態(tài)階段)中的矢量軌跡。從圖中可以看出,定子C 相繞組過零關(guān)斷后,感應(yīng)電機進入兩相不對稱瞬態(tài)階段,該過程較為短暫;定子磁鏈和電動勢空間矢量都略微減小,區(qū)別僅在于磁鏈?zhǔn)瞧交某事菪螠p小,而電動勢在定子C相繞組斷開瞬間是躍變減小的,然后再平滑的減小。

圖3 過渡過程中定子磁鏈和電動勢空間矢量軌跡Fig.3 Trajectories of stator flux and EMF vector during the transition
4.2 定子端不接電源時轉(zhuǎn)子自由運動過程的解析
從圖1a 中的t1時刻起,感應(yīng)電機定子三相繞組完全與主電源斷開,定子電流全部為零,而轉(zhuǎn)子電流不為零,但由于轉(zhuǎn)子電阻、轉(zhuǎn)動慣性和負(fù)載的存在,使得轉(zhuǎn)子電流逐漸衰減,此階段為轉(zhuǎn)子自由運動過程,可用式(3)所示的數(shù)學(xué)模型進行定量分析。
假設(shè)失電后階段一所計算的轉(zhuǎn)子電流終值為ir1,即t1時刻前的轉(zhuǎn)子電流,其可認(rèn)為是階段二中轉(zhuǎn)子電流的初值。結(jié)合式(3),可得轉(zhuǎn)子電流為

值得注意的是,上式是針對電機某一恒定轉(zhuǎn)速而言的,而實際上由于空載轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩的作用,斷電過程中感應(yīng)電機的轉(zhuǎn)速在不斷下降,對此,常有兩種處理辦法:①假設(shè)斷電過程短暫且轉(zhuǎn)動慣性較大,可認(rèn)為電機轉(zhuǎn)速幾乎不變,這樣轉(zhuǎn)子電流就可以直接通過式(12)來描述;②如果斷電過程較長,則認(rèn)為電機轉(zhuǎn)速下降,這時,可將階段二分成若干個計算區(qū)間,每個區(qū)間足夠小,以至于可認(rèn)為電機轉(zhuǎn)速在該區(qū)間內(nèi)不變,每個區(qū)間計算之后,根據(jù)式(13)計算出一個新的電機轉(zhuǎn)速,用于下一個區(qū)間的計算。

式中 p——電機極對數(shù);
J——轉(zhuǎn)動慣量;
TL——阻轉(zhuǎn)矩;
Δt——所選區(qū)間對應(yīng)的時間;
ωr(k)——當(dāng)前區(qū)間內(nèi)的電機轉(zhuǎn)速,ωr(k+1)為下一區(qū)間內(nèi)轉(zhuǎn)速。
對于重要生產(chǎn)而言,要求電機斷電后盡快進行電源切換,因此一般情況下斷電過程較為短暫,此時可假設(shè)電機轉(zhuǎn)速不變。這樣,轉(zhuǎn)子電流產(chǎn)生的磁場在定子中進行交鏈,所產(chǎn)生的殘余定子磁鏈為

磁鏈交變,在定子繞組中感應(yīng)出電動勢,即所謂的殘壓為

顯然,該階段是由初始狀態(tài)引起的系統(tǒng)自由運動,對空載實驗電機而言,根據(jù)上述解析結(jié)果能夠快速計算求得定子殘余磁鏈和殘壓,并可得極坐標(biāo)系中它們的空間矢量軌跡,如圖4 所示。
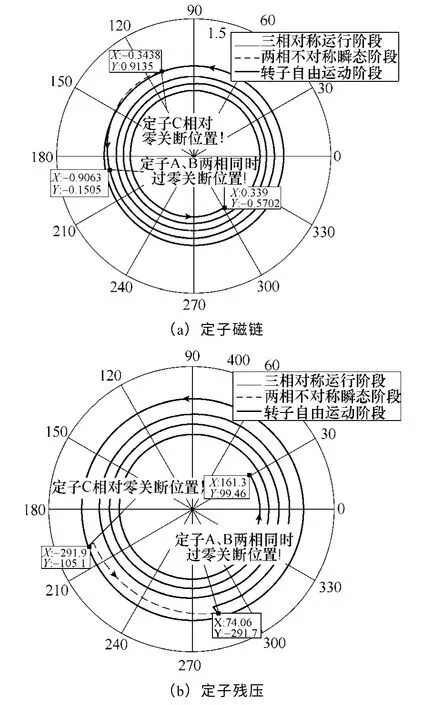
圖4 定子繞組完全斷開后磁鏈和殘壓的空間矢量軌跡Fig.4 Trajectories of stator flux and residual voltage vector after the thorough open of stator windings
從圖4 中可以看出,感應(yīng)電機斷電進入第二階段(即轉(zhuǎn)子自由運動過程)后,定子中殘余的磁鏈和電動勢(即殘壓)均呈螺旋形平滑的減小,直至電源切換開始,抑或至兩者均減小到零(即其軌跡螺旋地減小到極坐標(biāo)原點)。
5 不同備用電源電壓與定子殘壓間電壓差和相角差的特性分析
本節(jié)在假設(shè)備用電源電壓幅值、頻率與主電源相同條件下,討論具有各種不同初相角的備用電源電壓與定子殘壓間的電壓差和相角差特性,由此確定最優(yōu)電源切換策略和最有利切換時刻,從而有效抑制電源切換中的沖擊問題。
結(jié)合式(5),易得電機斷電后即將接入的備用電源電壓空間矢量為

式中,δ 是備用電源電壓超前主電源的電角度,δ=0表示備用電源電壓與主電源電壓同相位,δ≠0 表示兩電源相位不同,其大小代表兩電源電壓相位差的大小。
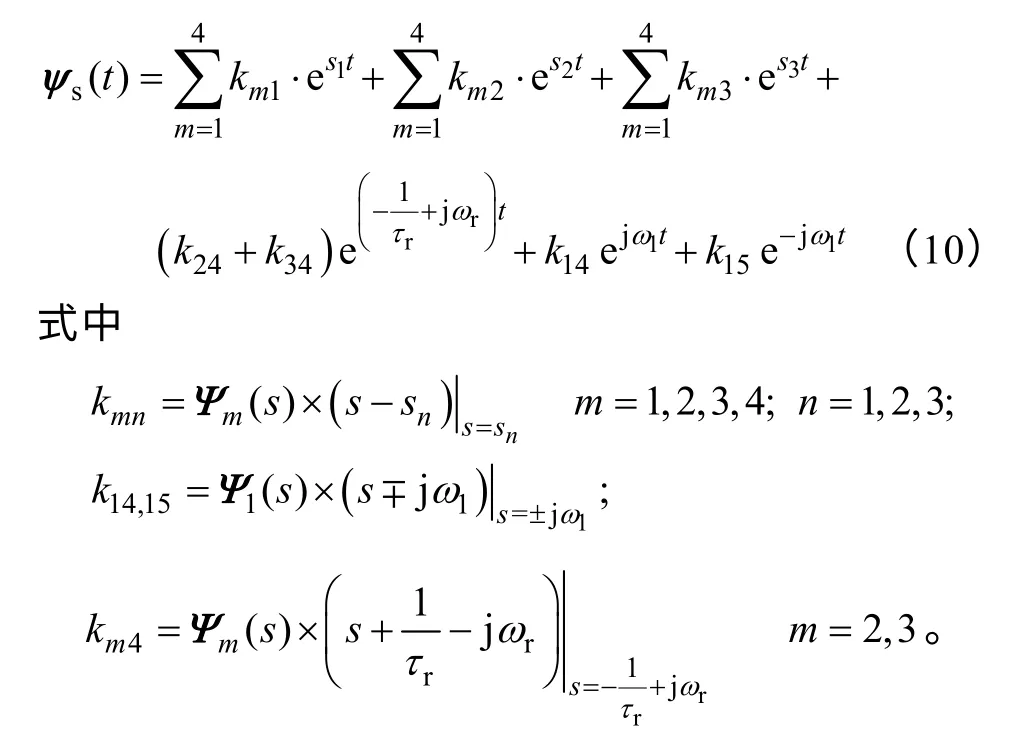
根據(jù)上文解析推導(dǎo)結(jié)果可知,感應(yīng)電機斷電后,不管是定子兩相不對稱瞬態(tài)還是轉(zhuǎn)子自由運動過程,其定子殘壓均可寫為以下形式

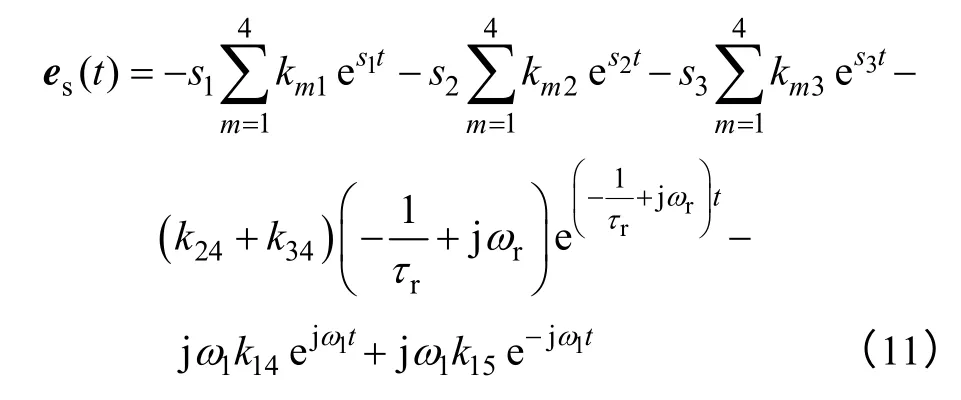
式中,A、B 分別為定子殘壓的幅值和相角,它們均是時間的函數(shù),其解析表達(dá)式亦可以通過式(11)和(15)推導(dǎo)出來,為簡單計,這兒不再具體列出,而是給出計算它們的一種簡單辦法。根據(jù)式(11)和式(15),可以解析計算出感應(yīng)電機斷電過程中每一時刻t 的定子殘壓空間矢量es(t),再根據(jù)式(18)~式(19)分別計算出該時刻定子殘壓空間矢量的幅值A(chǔ)(t)和相角B(t)為

對空載實驗電機,根據(jù)式(11)、式(15)、式(18)和式(19)進行計算,可得斷電過程中定子殘壓空間矢量的幅值、相角特性,如圖5 所示。從圖中可以看出,定子繞組斷電后,隨著時間的推移,電動勢幅值在不斷的減小,相角變化周期在不斷的增大,這主要是電機轉(zhuǎn)子電流衰減和轉(zhuǎn)速降低引起的。

圖5 定子電動勢的幅值、相角特性Fig.5 Amplitude and phase-angle characteristics of the stator EMF
根據(jù)式(16)和式(17),可得不同備用電源電壓和定子殘壓之間的電壓差空間矢量為

此外,由式(16)和式(17),可得不同備用電源電壓和定子殘壓空間矢量之間的相角差為

式中,δ 可每取一個值,代表一種備用電源。
考慮δ=0°和δ=120°這兩種不同備用電源,針對空載運行的實驗電機,根據(jù)式(20)和式(21)進行計算,可得兩種備用電源電壓與定子殘壓間的電壓差幅值特性和相角差特性,分別如圖6 和圖7所示,兩圖中還給出了前面所述的殘壓空間矢量幅值特性。從圖中可以看出兩種不同備用電源下的對應(yīng)的電壓差和相角差變化規(guī)律是不同的。在斷電之前,兩種備用電源對應(yīng)的電壓差和相角差均為恒值,但大小不同,就相角差而言,其大小分別為 0°和120°;斷電后,兩種備用電源對應(yīng)的相角差均由初值緩慢增大至180°,這時備用電源電壓與殘壓第一次反向,電壓差出現(xiàn)最大值,然后相角差由-180°逐漸變化之0°,這時備用電源電壓與殘壓同相位,電壓差幅值最小,隨后,轉(zhuǎn)子轉(zhuǎn)速下降導(dǎo)致相角差變化越來越快,電壓差幅值也隨之變化越來越快,最后,當(dāng)電機轉(zhuǎn)速下降為0 后,相角差按同步速變化,電壓差幅值為備用電源電壓幅值而不再變化。
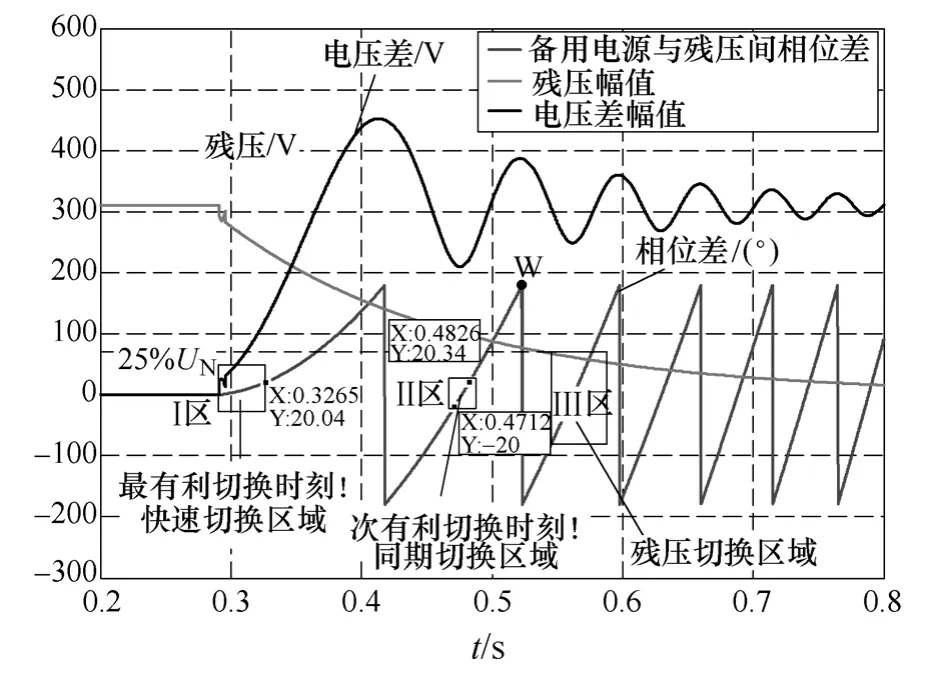
圖6 δ=0°時的殘壓、電壓差及相角差特性Fig.6 The characteristics of residual voltage,voltage difference and angle difference when δ=0°

圖7 δ=120°時的殘壓、電壓差及相角差特性Fig.7 The characteristics of the residual voltage,voltage difference and angle difference when δ=120°
根據(jù)上述分析,并結(jié)合圖6 可以發(fā)現(xiàn),當(dāng)備用電源與主電源同相位時,感應(yīng)電機從主電源斷電后,相角差由0 緩慢增大,電壓差也由0 逐漸增大,顯然這種情況下在主電源斷開后越快進行電源切換越有利,即這種情況下快速切換最優(yōu),然而一般情況下考慮到開關(guān)快速性不足,不能實現(xiàn)最優(yōu)電源切換方式,可以考慮選擇同期切換,如果同期切換也不能成功實現(xiàn)時,則可以等待殘壓衰減至25%額定值以下時考慮實施殘壓切換,這三種切換方式及其對應(yīng)的有利切換時刻見圖6 中所標(biāo)。用晶閘管開關(guān)代替普通開關(guān),對空載實驗電機在斷電時間為 25ms和225ms 時分別進行電源切換,可得兩種情況下的定子電流實測波形如圖8 所示,其中斷電時間25ms位于圖6 中的I 區(qū)內(nèi),而斷電時間225ms 對應(yīng)圖6中的W 點(為反向時刻)。從圖8 中可以看出,當(dāng)備用電源與主電源同相位時,在快速切換最有利時刻進行電源切換能夠有效抑制沖擊電流,而在備用電源與殘壓反向時刻對應(yīng)的沖擊很大,甚至比直接起動電流還大。

圖8 δ=0°時,電源切換中定子電流實測波形Fig.8 Test waveforms of stator currents during the power switching when δ=0°
結(jié)合圖7 可以發(fā)現(xiàn),當(dāng)備用電源電壓超前主電源120°時,感應(yīng)電機斷電初期,備用電源電壓與殘壓間的相角差較大,并很快出現(xiàn)反向這種最糟糕情況,且電壓差幅值很大,顯然這時不適合采用快速切換方式,但相角差很快又從-180°減小至0°,這時電壓差幅值最小,在此刻進行電源切換最有利,即同期切換方式最優(yōu),其對應(yīng)切換時刻見圖7 所示,如果在此點不能成功實現(xiàn)電源切換,也可等待實施殘壓切換。一種通過晶閘管開關(guān)代替普通開關(guān)的空載實驗電機在斷電時間為20ms 和150ms 分別進行電源切換所測得的定子電流波形如圖9 所示,其中斷電時間20ms 對應(yīng)圖7 中的Q 點,該點對應(yīng)相角差為127°,而斷電時間150ms 則位于圖7 中的同期切換有利時刻區(qū)域。從圖9 可以看出,當(dāng)備用電源與主電源相位相差較大時,不能實施快速切換,而在相角差第一次為零(即備用電源電壓與殘壓同相位)時刻附近進行電源同期切換能夠有效抑制沖擊電流。
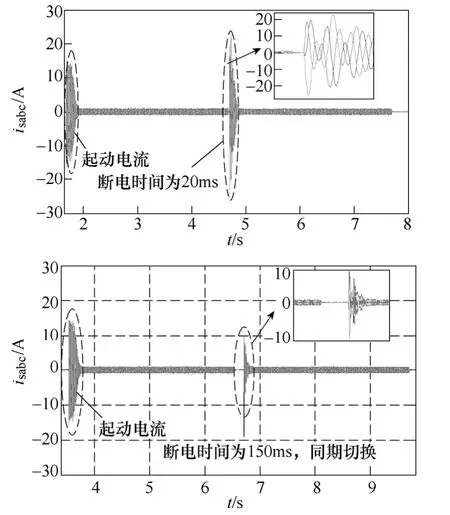
圖9 δ=120°時,電源切換中定子電流實測波形Fig.9 Test waveforms of stator currents during the power switching when δ=120°
這兒需要注意的是,圖8 和9 中所示電源切換中的定子電流實測波形,是使用晶閘管開關(guān)來實現(xiàn)電源切換的結(jié)果,其動作時間近似可以忽略,若使用斷路器或者接觸器,還需要考慮開關(guān)的動作時間。
6 結(jié)論
本文在假設(shè)備用電源電壓幅值、頻率與主電源相同且電源切換中電機轉(zhuǎn)速不變條件下,基于感應(yīng)電機對稱、不對稱空間矢量瞬態(tài)模型,對電源切換中定子殘壓及其與不同備用電源電壓間的電壓差和相角差進行了準(zhǔn)確的定量研究,據(jù)此確定不同備用電源下的最優(yōu)電源切換策略和最有利切換時刻,并取得以下結(jié)論:
(1)由電機斷電后的定子電流實測結(jié)果,發(fā)現(xiàn)在電機進入轉(zhuǎn)子自由運動過程之前,存在較為短暫的定子兩相不對稱瞬態(tài)過程,這種考慮有利于定子殘壓、電壓差及相角差的準(zhǔn)確計算。
(2)當(dāng)備用電源與主電源電壓相位差別較大時,同期切換最優(yōu),而當(dāng)二者相位相同或者差別較小時,快速切換最優(yōu),但是一般情況下由于開關(guān)快速性不足,不能在最有利時刻實現(xiàn)快速切換,也可考慮使用同期切換,當(dāng)快速切換和同期切換均未成功實現(xiàn)時,可采用殘壓切換方式,此外還需考慮開關(guān)的動作時間。
(3)用解析方法計算得到的殘壓、電壓差和相角差,能夠快速并準(zhǔn)確確定最優(yōu)切換控制策略。
(4)通過電源切換實測結(jié)果,驗證了所預(yù)先確定的最優(yōu)電源切換方式和最有利切換時刻是正確可行的,因此其具有工程應(yīng)用價值,能夠為電源切換中沖擊問題的抑制研究提供理論參考和支持。
[1]Faiz J,Ghaneei M,Keyhani A.Performance analysis of fast reclosing transients in induction motors[J].IEEE Transactions on Energy Conversion,1999,14(1):101-107.
[2]Beckwith T R,Hartmann W G.Motor bus transfer:considerations and methods[J].IEEE Transactions on Industry Applications,2006,42(2):602-611.
[3]Yalla M V V S.Design of a high-speed motor bus transfer system[J].IEEE Transactions on Industry Applications,2010,46(2):612-619.
[4]Das J C.Effects of momentary voltage dips on the operation of induction and synchronous motors[J].IEEE Transactions on Industry Applications,1990,26(4):711-718.
[5]Higgins T A,Snider W L,Young P L,et al.Report on bus transfer.I.assessment and application[J].IEEE Transactions on Energy Conversion,1990,5(3):462-469.
[6]高景德,王祥珩,李發(fā)海.交流電機及其系統(tǒng)的分析[M].北京:清華大學(xué)出版社,1992.
[7]Woudstra J B,Deleroi W.Re-switching of an induction motor with remainder flux[C].Third International Conference on Power Electronics and Variable-Speed Drives,London,1988: .
[8]Daugherty Roger H.Bus transfer of AC induction motors:a perspective[J].IEEE Transactions on Industry Applications,1990,26(5):935-943.
[9]Shaltout A,Omoush M A L.Reclosing torques of large induction motors with stator trapped flux[J].IEEE Transactions on Energy Conversion,1996,11(1):84-90.
[10]鄧建國.三相異步電動機瞬間斷電重合閘瞬態(tài)分析[J].電力自動化設(shè)備,2004,24(1):37-41.Deng Jianguo.Transient analysis on reclosing of three-phase asynchronous motor[J].Electric Power Automation Equipment,2004,24(1):37-41.
[11]Pillay P,Sabur S M A.Use of reduced order models to calculate reclosing transients in a refinery[C].Thirtieth Industry Applications Society Annual Meeting,Orlando,USA,1995,3:2180-2188.
[12]Hornak D L,Zipse Donald W.Automated bus transfer control for critical industrial processes[J].IEEE Transactions on Industry Applications,1991,27(5):862-871.
[13]Cui Xueshen,Yang Yulei,Zhou Zhenhua,et al.The research on residual voltage of asynchronous motors and its impact on power restoration[C].Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies,NanJing,China,2008.
[14]高吉增,楊玉磊,崔學(xué)深.感應(yīng)電動機失電殘壓的研究及其對重合過程的影響[J].電力系統(tǒng)保護與控制,2009,37(4):45-48.Gao Jizeng,Yang Yulei,Cui Xueshen.The research of the residual voltage of induction motor after dumping and its influence during restoration[J].Power System Protection and Control,2009,37(4):45-48.
[15]李和明,張自力,崔學(xué)深,等.晶閘管-電動機系統(tǒng)不對稱瞬態(tài)建模及解析[J].電工技術(shù)學(xué)報,2013,28(8):241-249.Li Heming,Zhang Zili,Cui Xueshen,et al.Asymmetrical transient modeling and analytical research of SCR-motor systems[J].Transactions of China Electrotechnical Society,2013,28(8):241-249.
[16]B 阿德金斯,R G 哈利.交流電機統(tǒng)一理論[M].唐任遠(yuǎn),朱維衡譯.北京:機械工業(yè)出版社,1980.
[17]李衛(wèi)國,羅應(yīng)立,邱宇峰,等.高壓固態(tài)切換開關(guān)在切換不同屬性負(fù)載時的殘壓研究[J].中國電機工程學(xué)報,2013,33(15):164-172.Li Weiguo,Luo Yingli,Qiu Yufeng,et al.Research on residual voltages of high-voltage solid-state transfer switch transferring different characteristic loads[J].Proceedings of the CSEE,2013,33(15):164-172.
[18]湯蘊璆,張奕黃,范瑜.交流電機動態(tài)分析[M].北京:機械工業(yè)出版社,2008.
[19]崔學(xué)深.感應(yīng)電機電源軟投入相關(guān)理論及節(jié)能控制新技術(shù)的研究[D].北京:華北電力大學(xué),2009.
[20]Novotny D W,Lipo T A.Vector control and dynamics of AC drives[M].New York:Oxford Clarendon Press,1996.
[21]羅煒,崔學(xué)深,羅應(yīng)立.感應(yīng)電機不對稱暫態(tài)分析中一類一元三次特征方程及其近似求解[J].中國電機工程學(xué)報,2008,28(27):126-130.Luo Wei,Cui Xueshen,Luo Yingli.Approximate solutions of a class of cubic characteristic equations in asymmetric transient analysis of induction machines[J].Proceedings of the CSEE,2008,28(27):126-130.