多輪剎車均衡控制技術研究及仿真驗證
2015-11-23 06:34:22崔福霞李鵬飛
大眾科技 2015年9期
崔福霞李鵬飛
(1.西安航空職業技術學院,陜西 西安 710089;2.西安工程大學,陜西 西安 710048)
多輪剎車均衡控制技術研究及仿真驗證
崔福霞1,2李鵬飛2
(1.西安航空職業技術學院,陜西 西安 710089;2.西安工程大學,陜西 西安 710048)
對多輪剎車均衡控制的原理進行了分析,并對控制算法進行了研究,設計了平衡調節器,建立了基于均衡控制技術的多輪系剎車系統仿真模型,仿真結果表明,多輪系均衡控制策略可以使飛機在滑行剎車時減小側滑、減小飛機地面剎車時的偏航距離。該技術可使剎車時各機輪剎車載荷均衡,對于減少輪胎偏摩,避免剎車時的嘯叫和共振具有重要意義。
多輪系;剎車;均衡控制;仿真驗證
1 引言
飛機機輪剎車控制系統是飛機起飛降落系統重要的組成部分,其主要任務是不斷檢測剎車機輪的滑動狀態,根據檢測結果及時調節輸入壓力,達到有效剎車又不致于機輪深度打滑,從而縮短飛機的著陸滑跑距離[1]。
多輪系飛機剎車系統是一個比單輪剎車系統復雜的非線性系統,剎車過程中存在著更多的隨機干擾,結構參數具有時變性和時不變性,用傳統的控制方法難以達到預期剎車效果[2]。在飛機機輪剎車過程中,機場側風、不均勻氣流及跑道等情況會使各個機輪承受的載荷不一致,從而帶來機輪運動狀態的不一致,對剎車通道的單獨控制已不能滿足要求,必須對多個機輪間進行均衡控制。
2 多輪系均衡控制技術研究
2.1多輪系機輪布局
對于大型飛機,為了承擔更大的載荷,起落架的布局形式多采用多輪或多輪多支柱等形式,如圖1所示為典型的四輪小車式主起落架機輪布局。
在實際剎車過程中,除了機場側風、不均勻氣流及跑道等情況可能使左右主起落架上的機輪運動狀態不一致。另外,由于在飛機地面運動過程中車架的俯仰運動,導致車架前后機輪的載荷不同,從而使前后機輪的打滑程度不同。因此,必須采用多通道控制方式,對左右兩側和前后兩向的機輪剎車分別控制。
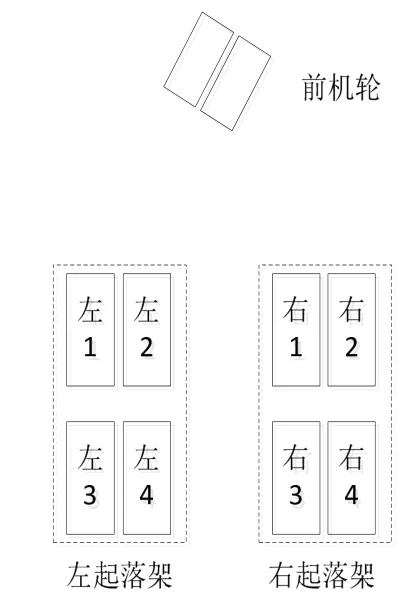
圖1 四輪小車式主起落架機輪布局
2.2多通道控制的原理
由于同一個車架左右兩個機輪的運動狀態差別不大,對此兩個機輪可采用相同的控制通道,根據上述的結構布局,控制方式可簡化為兩對側間雙通道控制和兩對前后向雙通道控制,其結構原理圖如圖2所示。
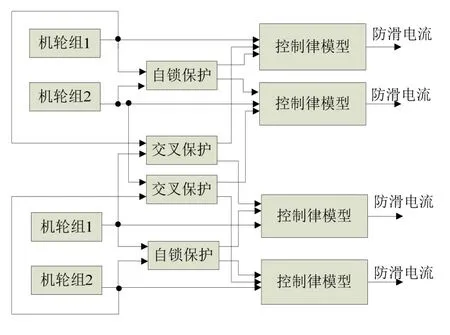
圖2 多通道機輪剎車控制原理圖
在采用多通道控制過程中,被控制的左右機輪速度差不能太大,如果太大,其運動將成S型,偏離正常航線,威脅飛機安全。這里將采用交叉控制和自鎖控制將結合的方法進行多通道的控制,控制思想是:將左右兩側前向或后向兩個機輪編為一個機輪組;對每一個機輪組,取其中速度較小者的輪速為本機輪組的輪速;每一個機輪組采用單獨的通道進行防滑控制,當各個機輪組之間的輪速相差不大時,交叉保護和自鎖保護不起作用;當前后機輪組輪速相差過大時,自鎖保護開始工作,當左右機輪組輪速相差過大時,交叉保護起作用。
2.3均衡調節算法
由于左右機輪和地面結合面的差異,左右緩沖器特性不一致,以及非對稱特性下的剎車等的影響,飛機左右機輪的運動會出現不平衡現象,即左右機輪的前進方向不是始終和飛機中軸線保持平行。這些情況對飛機防滑剎車系統的影響是很大的,若發生這種情況,不把兩邊機輪的運動情況調節平衡就會使飛機偏離跑道,同時這種調節還必須是及時的。另外,在控制盒中增加了一個左右機輪平衡調節器。
設E為左右兩輪轉速差設定的門限值,定義如下函數:
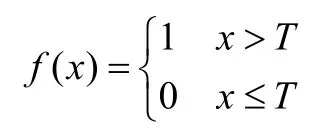
設lV、rV為左主機輪與右主機輪的輪速,lu、ru分別為當前兩主機輪的防滑剎車輸出信號;lY、rY為補償之后的防滑剎車輸出信號。則該兩個通道機輪的平衡剎車控制律為:


由此,帶有平衡調節補償功能的雙通道防滑剎車控制結構如圖3所示。
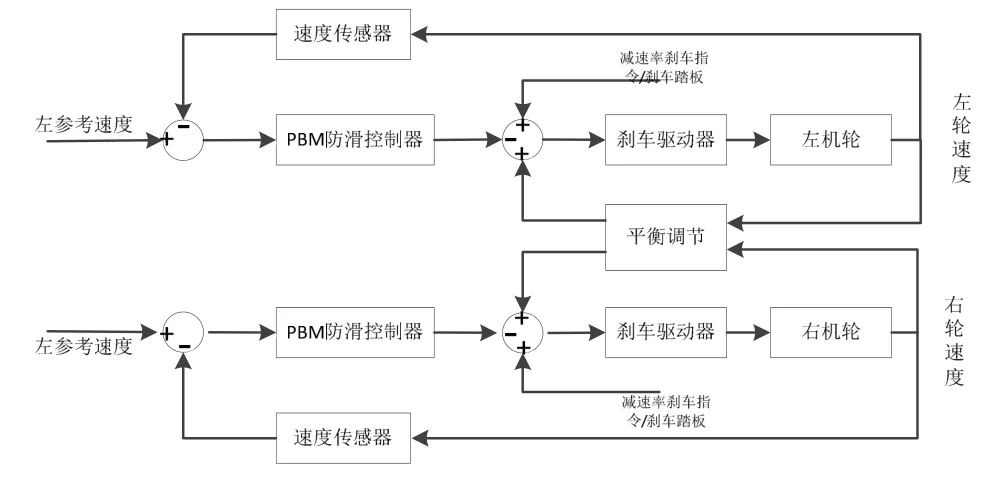
圖3 帶有平衡調節給你的防滑剎車控制結構
由上述的分析可知,當機輪的輪速等效電壓值小于某個值時,給速度大的機輪控制器適當的減小控制電流,增加剎車壓力,減小機輪速度;當機輪速度介于兩個門檻值之間時,說明機輪已開始打滑,此時就要適當增大輸出電流,減少剎車壓力,機輪速度增大。
3 仿真驗證
采用Matlab/simulink對飛機動力學、機輪、防滑剎車系統等進行建模,仿真模型的結構如圖4所示。
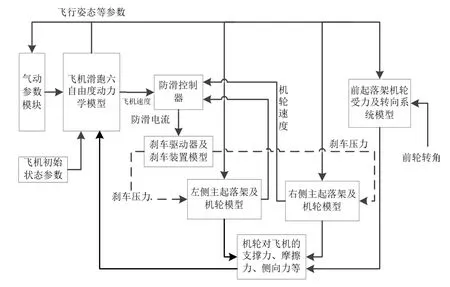
圖4 仿真原理框圖
當左右機輪狀況不一致,無多輪系防滑控制策略,減速率為-2m/s時的仿真結果如圖5所示。
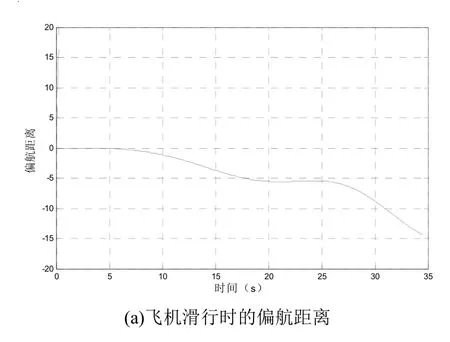
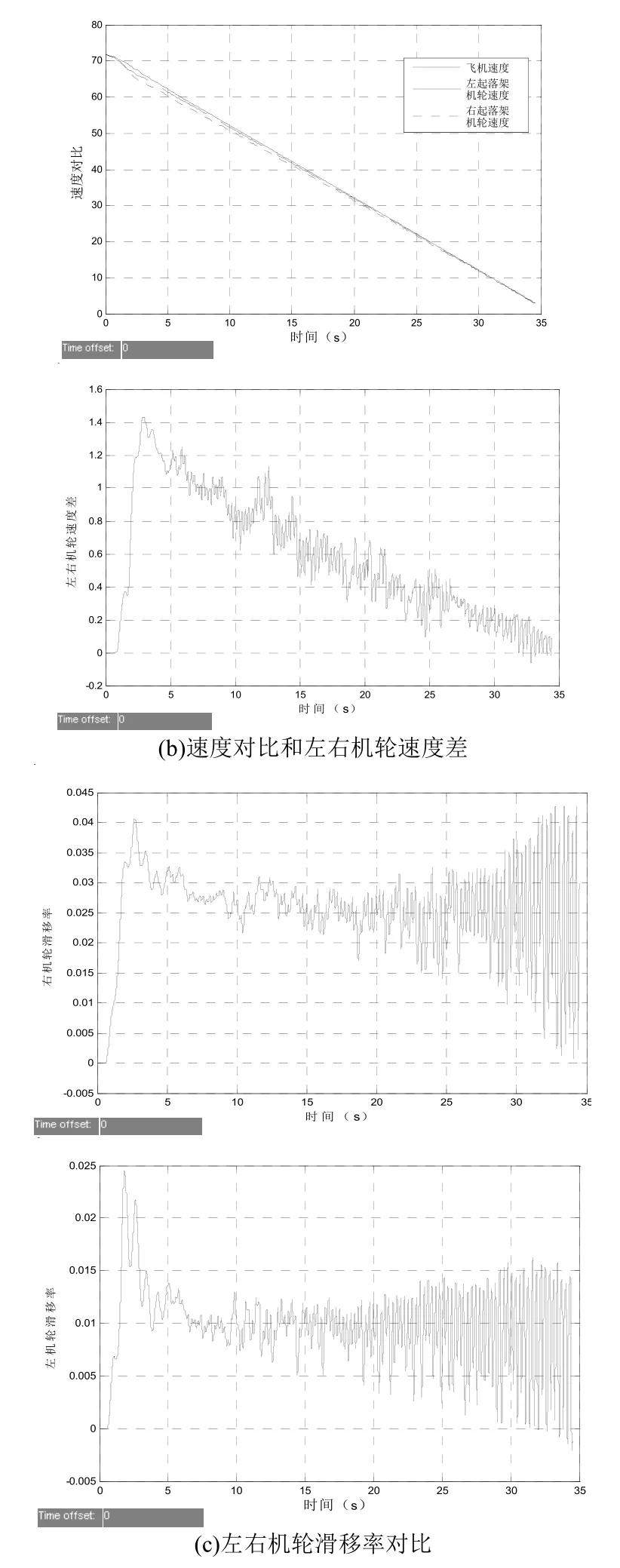
圖5 左右機輪載荷不一致時無多輪系控制律時的仿真結果
當有多輪系均衡控制策略,并且左右機輪載荷狀態不一致,減速率為-2m/s時的仿真結果如圖6所示。

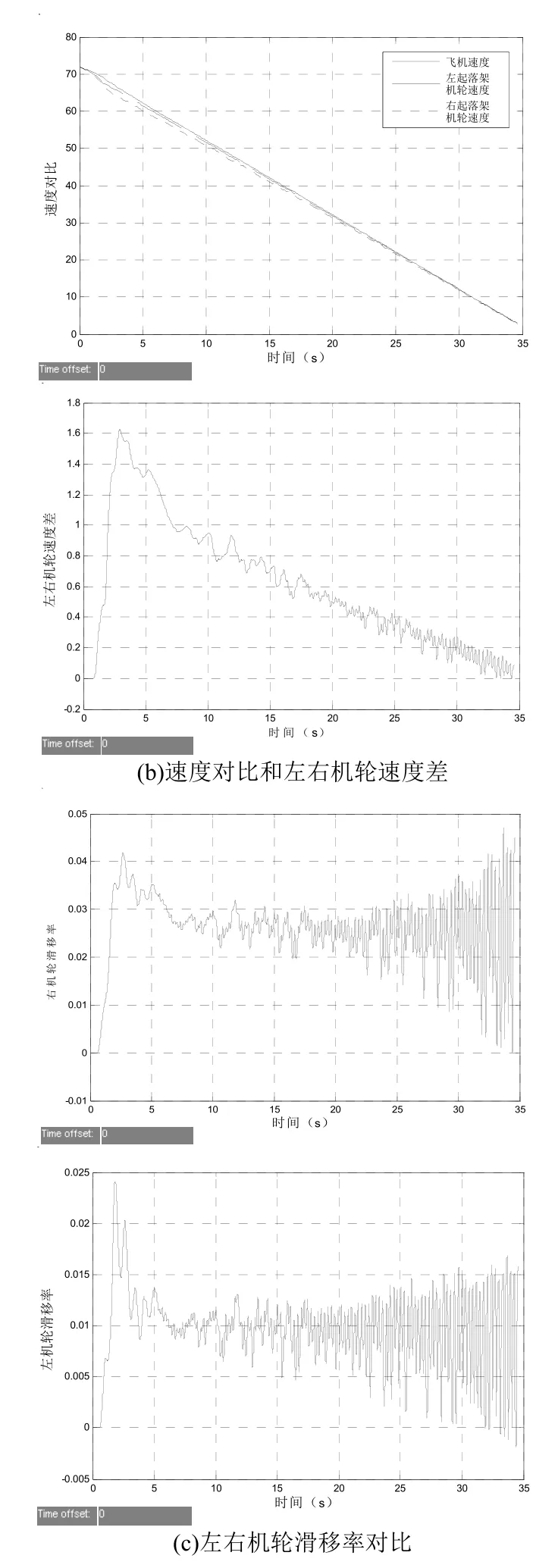
圖6 左右機輪狀況不一致時有多輪系控制律時的仿真結果
從圖5和圖6可以看出,由于給定減速率都是-2m/s,在防滑系統的控制下,飛機在其航向上的滑行距離基本沒有差別;從這兩個圖的飛機偏航距離對比可以看出,在有多輪系均衡控制策略時,飛機偏航距離為5m左右;在系統無多輪均衡控制策略時,偏航距離增加到了15m左右,說明均衡控制策略起到了防止因剎車引起偏航的作用。
從飛機速度和速度差的對比圖可以看出,在有多輪系均衡控制策略,飛機左右兩側飛機速度變化率明顯比沒有均衡控制時平緩很多,在飛機速度差的控制方面,多輪系均衡控制策略也有很大的作用。
從飛機左右機輪滑移率的對比圖可以發現,在系統有多輪系均衡控制策略時,飛機滑移率的變化率變的平緩了許多。
最后由飛機側向力的對比可以看出,多輪系均衡控制策略對飛機左右起落架所受的側向力也得到了一定的改善。
通過上述的分析可知,在飛機左右跑道狀況不一致時,多輪系均衡控制策略可以使飛機在滑行剎車時減小側滑、減小偏航距離比較小,此時需要配合前輪轉彎系統來減小偏航距離。
4 結論
本文研究了多輪系機輪剎車均衡控制技術,對多通道見的均衡調節算法進行了設計,建立了基于多輪系均衡控制技術的飛機剎車系統仿真模型,開展了相關仿真分析工作,仿真分析結果表明:多輪系均衡控制策略可以使飛機在滑行剎車時減小側滑、減小飛機地面剎車時的偏航距離。同時,該技術可使剎車時各機輪剎車載荷均衡,對于減少輪胎偏摩,避免剎車時的嘯叫和共振具有重要意義。
[1] 齊潔.多輪系飛機剎車系統控制與仿真研究[D].西安:西北工業大學,2007.
Research and simulation of multi wheel brake control technology
Of wheel brake balance control principle are analyzed, and the research of control algorithm and the balance controller is designed and established based on balance control technology of multi gear brake system simulation model, simulation results show that, multi wheel balancing control strategy allows an aircraft to glide brake reduces sideslip, reduce the ground plane brake yaw distance. This technique can make the braking the wheel brake load balance, to reduce tire friction and avoid brake squeal and resonance is of great significance.
Multi gear; brake; balance control; simulation
V22
A
1008-1151(2015)09-0074-03
2015-08-11
崔福霞(1981-),女,河南周口人,西安航空職業技術學院實習實訓中心講師,研究方向為數控加工技術及仿真。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
能源工程(2020年6期)2021-01-26 00:55:22
建材發展導向(2019年13期)2019-08-24 06:37:40
山東冶金(2019年3期)2019-07-10 00:54:04
當代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2019年7期)2019-04-25 13:16:50
消費導刊(2018年10期)2018-08-20 02:57:02
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
通信電源技術(2016年1期)2016-04-16 04:57:26