用人體平面剛體模型分析太極拳在水平作用力下的力學原理
2015-11-07 02:44:11郭振興
邯鄲學院學報 2015年2期
顧 杰,郭振興,呂 蒙
(邯鄲學院 太極文化學院,河北 邯鄲 056005)
太極文化研究
用人體平面剛體模型分析太極拳在水平作用力下的力學原理
顧 杰,郭振興,呂 蒙
(邯鄲學院 太極文化學院,河北 邯鄲 056005)
為實現太極拳的力學分析,率先提出和建立了人體平面剛體模型。剛體模型簡括了人體構架、質量、速度、水平攻擊力、重力、地面反力、摩擦力等因素。應用該模型對太極拳進行水平作用力下的力學分析,得出了五個重要結論,即人體的重心要在支撐面內以維持穩定平衡;腳底打滑和失根是維持穩定平衡的兩種臨界條件;在臨界條件內人體平衡,超過任何一個臨界條件將導致人體失去平衡;水平攻擊力來自腳底的摩擦力、人的整體動量和肢體相對運動的動量;內勁造就動量和傳遞力。還通過數學計算,推導出太極拳套路訓練和推手競技中保持平衡的臨界條件和相應計算公式,并用算例演示了太極拳“發勁如放箭”、“引進落空”、“牽動四兩撥千斤”等技術技巧的力學原理,為太極拳的運動生物力學深入研究奠定了基礎。
太極拳;力學分析;人體平面剛體模型
太極拳屬于體育,是人的肢體運動和本體反應;太極拳屬于武術,是人的心理活動和對抗行為;太極拳蘊含力學原理,是人體與人體、人體與大地的相互作用,具有作用力與反作用力等力學性質。運用現代力學理論分析太極拳的技術動作,揭示太極拳“小力勝大力”、“牽動四兩撥千斤”、“引進落空”等奧妙,探索一條運用現代科學理論和技術手段研究太極拳的途徑,對于促進太極拳的科學化發展和國際化傳播具有很強的現實意義和深遠意義。
一、建立人體剛體模型以分析太極拳的力
(一)太極拳攻擊力的來源
太極拳是武術的一個拳種,具有獨特的技擊功能和巧妙的攻擊能力。太極拳的攻擊力來源于三個方面:
一是源于腳與大地的接觸。太極拳理論大家武禹襄(1812—1880)的《太極拳論》[1]講:“……其根在腳,發于腿,主宰于腰,形于手指。由腳而腿而腰,總須完整一氣……”這不僅講明了力的傳遞過程:起自腳,發于腿,轉由腰,運至手。而且強調,借助地面將下肢穩住了,上肢才能實現攻防的意向;起于下肢的力要通過軀干傳達于上肢,上肢才能將力施加給對方。武禹襄之后有許多論文、專著討論“其根在腳”的重要性和實施方法[2][3][4]。太極拳中的長勁就是典型運用地面反作用力攻擊對方的發勁方法。[5]10-17
二是源于人體的整體動量。動量是一個力學概念,是指物體質量和速度的乘積,在太極拳中用來描述太極拳的拳勁[6]54-69。太極拳講究“一動無有不動”,其攻擊和防守是在肢體不斷變化的運動中實現的,有速度、有質量,采用力學的術語是具有“動量”。正如太極拳宗師王宗岳(明代萬歷年間生人)在《十三勢行功心解》[7]中講:“……所謂變動虛實也,……運勁如百煉鋼,……發勁如放箭,……蓄而后發,……”例如,“靠”是太極拳的近身戰術,是以胸、肩、背的動量(速度乘以質量)靠擊對方,威力很大。又如太極拳的“轉腰”動作能夠形成人體的旋轉(角)動量,該旋轉動量產生很大的攻擊力。
三是源于相對運動形成的動量。《十三勢行功心解》[7]中說:“……曲中求直,蓄而后發。力由脊發,……”。楊式太極拳宗師楊澄甫(1883—1937)在《太極拳術十要》中說“……能含胸則自能拔背,能拔背則能力由脊發,所向無敵也。”。人的腰脊質量大,手臂質量小,兩者相對運動時,腰脊很小的速度可造成手臂很大的速度。太極拳令人驚嘆的短勁就是由腰脊發力通過臂手打擊對方[5]。
總之,力可以出自地面或者其他支撐面,攻擊者將地上的正向反作力和摩擦力傳遞給對方;力也可出自人體的整體動量,人體的動量和對方碰撞,給對方施加沖擊力;力還可以出自脊胸,大質量脊胸和手的相對運動賦予手高速度,手的動量和對方碰撞產生力。這三種力能夠聯合對外,是太極拳的威力所在。
(二)太極拳推手中的牛頓第三定律和人體剛體模型
太極拳的主要運動形式是套路和推手,套路是自身練功形式,也稱知己功夫;推手是雙人對抗訓練形式(也作為兩人比試功力的競技形式),也稱知彼功夫。推手訓練的目的一是練習在技擊對抗中如何判斷對方的進攻意圖(也稱聽勁);二是練習如何順勢借力向對方進攻(也稱發勁),其實質就是兩人在身體接觸的對抗中保持自身平衡,破壞對方平衡。
推手時雙方以手或前臂相接觸,你來我往相互施力。我方給對方施加一作用力,對方也給我方施加一個反作用力,見圖1。根據牛頓第三定律這兩力大小相等方向相反。并不因為某方功夫高強而能給另一方多一點力。
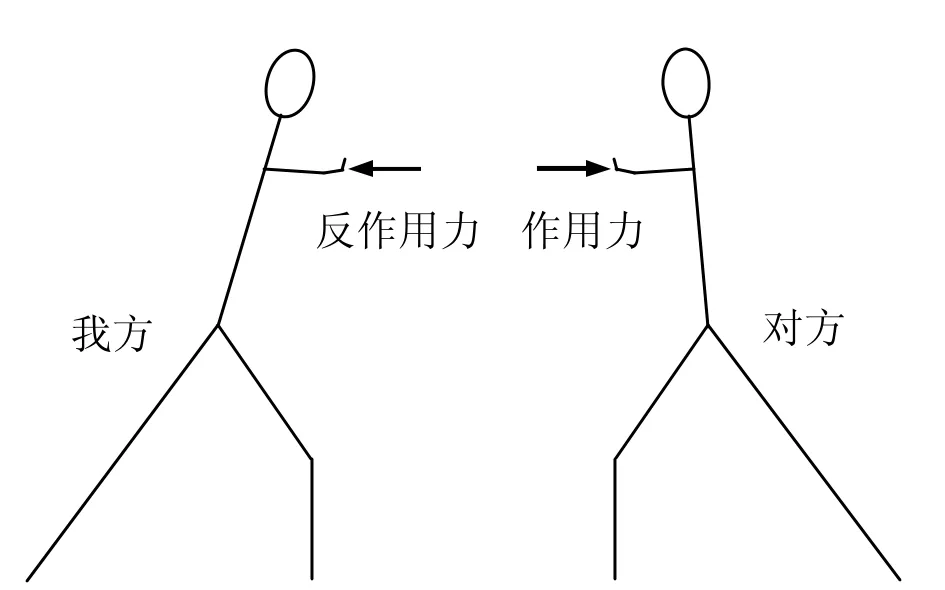
圖1作用力和反作用力
用力學的原理分析太極拳可以將充滿哲學理念的古老拳術與現代科學相結合,從而加深人們的理解和研究。因此,根據力學分析的一般要求和用于分析太極拳的需要,采用隔離體分析。如圖2所示,把人體簡化為平面內的一個剛體模型(簡稱為剛體),各肢體簡化成剛桿,剛桿的接點視為剛性,腳和地面的接觸處簡化為點。人體的質心是人體質量的中心,與重心重合,質量是指人體所含物質的多少。人體的質量是m,重力是W=mg 。隔離體分析就是把一個人體與外界的因素都化成力進行人體運動狀態分析。圖2是我方隔離體示意圖。其中:
m-人體質量
W=mg -人體重力垂直向下,作用于重心
g=9.8(m/s2)-重力加速度
F-對方對我方施加的水平外力,和我方施于對方的攻擊力大小相等方向相反
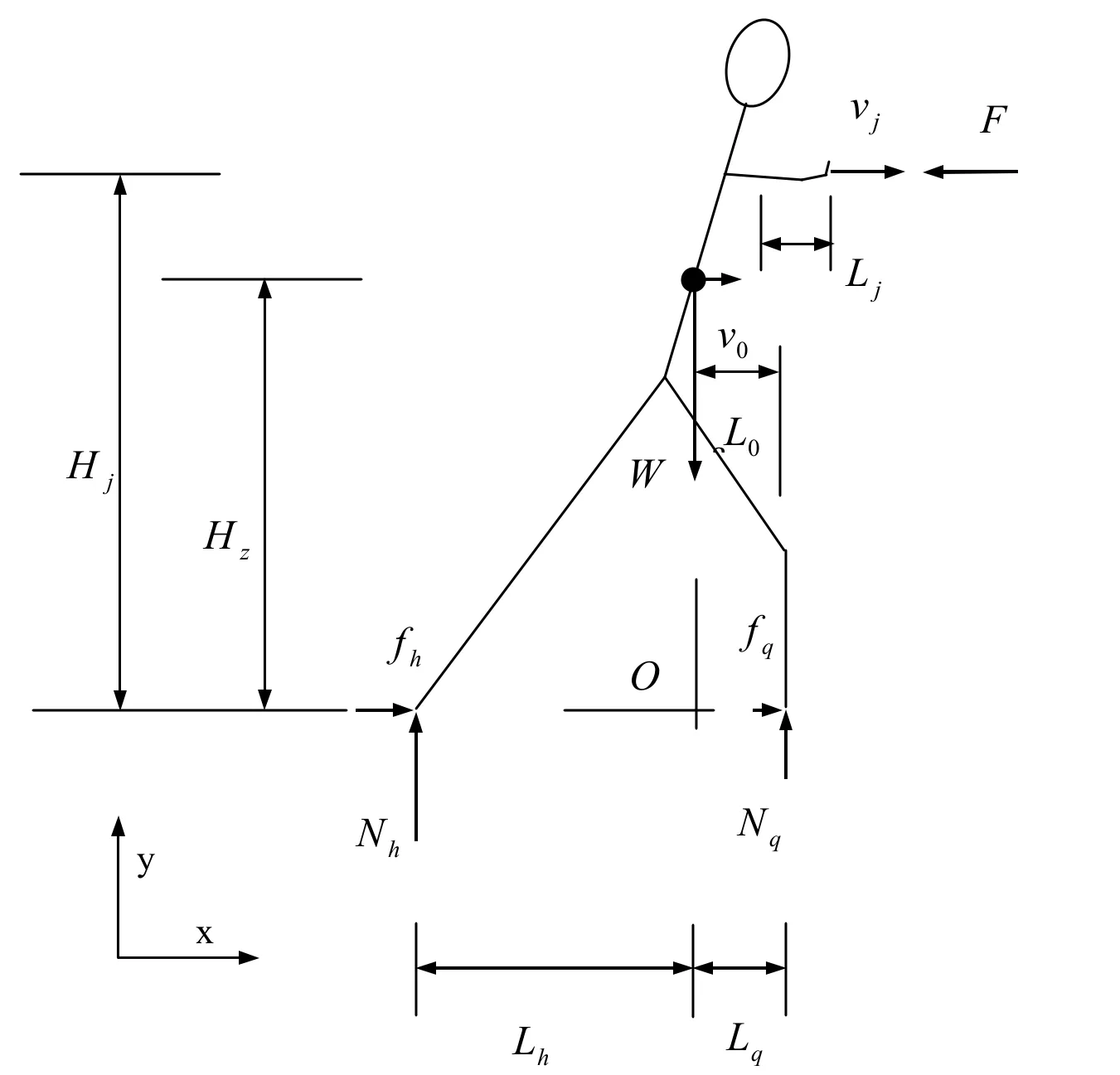
圖2剛體模型的隔離體
Nq-地面對前腳的正向支撐力
Nh-地面對后腳的正向支撐力
fq-地面對前腳的切向摩擦力
fh-地面對后腳的切向摩擦力
Lq-重心到前腳的水平距離
Lh-重心到后腳的水平距離
Hz-重心到地面的高度
Hj-接手處到地面的高度
v0-人體質心的水平初速度
vj-手的水平初速度(由于手和身體的相對運動產生)
(三)太極拳人體剛體模型的力學條件
1. 摩擦力
一個物體放在水平地面上,有一個水平力Fs作用于其上,見圖3-圖5。地面對物體有一個與重力等值反向的正壓力N,地面對物體有一個摩擦力f。
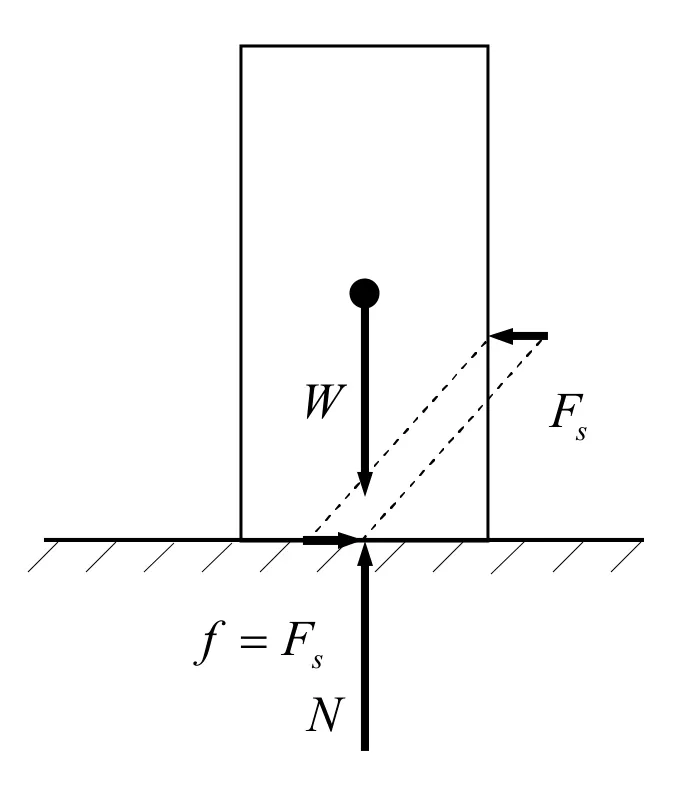
圖3 水平力<最大摩擦力
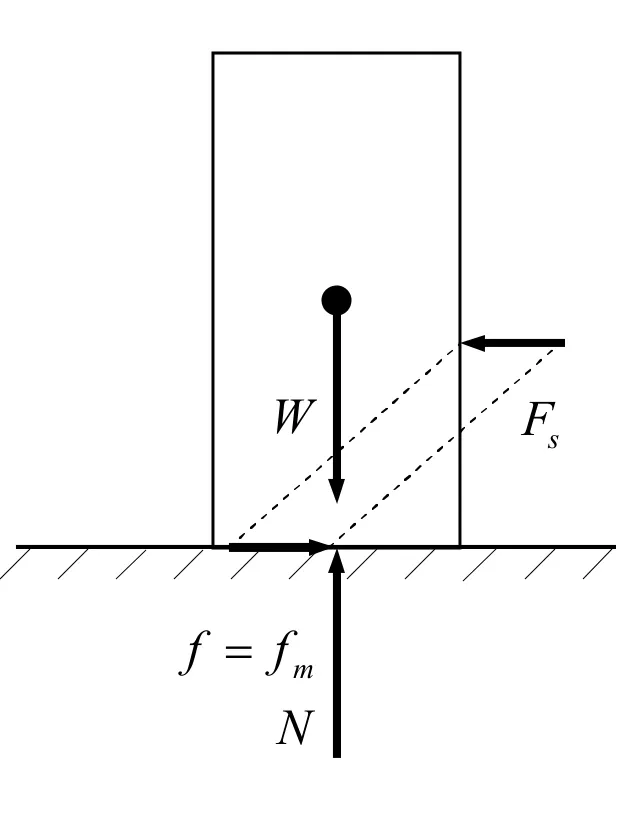
圖4 水平力=最大摩擦力
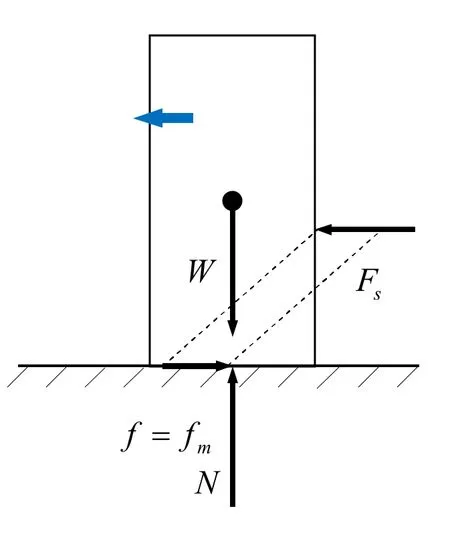
圖5 水平力>最大摩擦力
摩擦力有個上限,稱為最大摩擦力fm。最大摩擦力與正向力成正比,

這里μ是摩擦系數。鑒于水平力和最大摩擦力的大小關系,有三種情況。如果水平力小于最大摩擦力,則摩擦力和水平力相等,物體不動,見圖 3。如果水平力等于最大摩擦力,則摩擦力也等于最大摩擦力,物體處于要滑未滑的臨界狀態,見圖 4。如果水平力大于最大摩擦力,則摩擦力等于最大摩擦力,物體滑動,見圖 5。數學表示為,

2. 人體的平衡
以人體的重心位置變化作為依據,人體有三類平衡:穩定平衡、不穩定平衡和隨遇平衡。
穩定平衡:人體在外力作用下,偏離平衡位置后,當外力撤除時,人體自然恢復平衡位置。如果物體偏離平衡位置的結果是物體重心升高,則該平衡是穩定平衡。太極拳的多數步式屬穩定平衡,如弓步、虛步。
不穩定平衡:人體在外力的作用下,偏離平衡位置后,當外力撤除時,人體不僅不能回到原來的平衡位置,而是更加偏離平衡位置。如果物體偏離平衡位置的結果是物體重心降低,則該平衡是不穩定平衡。如果把腳與地的接觸面簡化成一個點的話,太極拳中的單腿獨立式屬不穩定平衡。
隨遇平衡:人體在外力的作用下,偏離平衡位置后,當外力撤除時,人體既不回到原來的平衡位置,也不繼續偏離原位置,而是在新位置上保持平衡。隨遇平衡在太極拳運動中很少見。
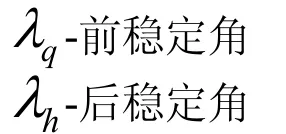
人體平衡的一般條件是重心的垂線與地面的交點在支撐面內,并且要有一定的穩定角。地面為人體提供了向上的支撐力,兩腳或單腳與地面的接觸面是支撐點,身體向地面的投影構成了支撐面,重力作用線同連接重心與支撐面邊緣相應邊界的直線二者之間的夾角構成了穩定角,見圖6。隨時保持自我平衡是太極拳的重要目標,不僅要做到平衡,而且要追求平衡的穩定程度。因此,人們在習練太極拳時都非常注意把重心保持在支撐面內和增大穩定角,以有利于增強身體自我的平衡性和穩定性。
重心越低,支撐面邊界越遠,穩定角越大。穩定角越大,穩定性越好;穩定角越小,穩定性越差;穩定角為零,人體處于臨界狀態。
太極拳身形中,弓步、虛步的穩定角都有較大量值,穩定度都很好。相比而言,弓步前后腳的穩定角都很大,而虛步后腳的穩定角偏小,所以弓步比虛步的穩定性要好。
單腿獨立一類的身形穩定角都較小,因而穩定度低,尤其在腳寬方向最差。如圖7的金雞獨立一式,重心高約100cm,穩定角不到3度,因為腳寬的一半一般不超過5cm。這樣的姿勢常被作為訓練身體穩定性的樁功,通過練習調節腳底壓力分布和肢體位置的能力,提高重心和壓力中心對齊的程度。
從運動學講,太極拳是一種人體平衡運動,是在鍛煉保持自身平衡同時破壞對方平衡的能力。套路訓練是用于增強自我平衡能力,推手訓練是用于增強破壞對方平衡能力,兩者都是訓練人體在一定速度下重心在相應支撐面內移動的能力。人體有速度時,重心在支撐面內移動是動態平衡;人體速度為零時,重心在支撐面內移動是靜態平衡。太極拳套路訓練要求在轉變動作過程中和定式時都要平衡,其實質就是要實現動態平衡和靜態平衡。在推手中,我方要在發放中和發放完的所有時刻都是平衡狀態,而對方在被發放過程中,前期處于動態平衡狀態,后期就處于不平衡狀態。對方因被發放而倒地或跳出都是身體失去平衡的結果。
圖6穩定角

圖7獨立的穩定角
在推手時,當我方重心越出支撐面一點點時,如果對方有一個頂的動量或力作用于我方,我方仍會保持平衡,處于穩定狀態;如果對方是個太極高手,不但不頂,卻順勢拉我方一下,那我方的重心會越出支撐面更遠,再也無法找回平衡。因此,任何時候都要避免讓重心越出支撐面。
3. 動量傳遞
動量是質量和速度的乘積,兩個動量可以通過碰撞相互傳遞。這可以從對兩個質點(是指只計質量忽略不計大小、形狀的物體)彈性碰撞的分析中看出。碰撞前兩質點有各自的速度,碰撞后他們的速度是什么?設:
m1-質點1的質量
m2-質點2的質量
v10-質點1碰撞前的速度
v20-質點2碰撞前的速度
v1-質點1碰撞后的速度
v2-質點2碰撞后的速度
按照動量守恒原理,碰撞前后的總動量不變,即:

彈性碰撞時動能守恒,即:

由(3-4)解得:

由此可見碰撞使兩質點的速度得到了改變。把(3)式改寫為:

(6)式左端是質點1動量的改變,右端是質點2動量改變的負值,(6)也可解釋成質點1將一部分動量傳遞給了質點2,而質點2將等量反向的動量傳遞給了質點1。所以動量可以通過碰撞傳遞,而且這傳遞是互相的。我們都熟悉兩個懸掛著的等質量彈性小球相互撞擊的物理實驗,這是一個典型的動量傳遞實驗。小球A以一定速度撞擊靜止的小球B,撞擊后,小球A停住,而小球B等速上擺。小球B擺回后撞擊已經靜止的小球A,撞擊后,小球B停住,而小球A等速上擺。
動能在碰撞時也有了傳遞,但動能傳遞和動量傳遞遵循不同的規律。動量傳遞有方向有大小,是矢量運算。動能傳遞只有大小,是標量運算。動量守恒(3)適用于彈性和非彈性碰撞。動能守恒(4)只適用于彈性碰撞。在非彈性碰撞中一部分能量轉換為非動能的形式,(4)的右端小于左端。由于上述兩個原因,動量傳遞更適合于描述碰撞。
太極拳的推手在力學上可以認為是碰撞。因而我方有一部分動量傳給對方,而對方有一個大小相等方向相反的動量傳給我方。
4. 動量傳遞時的沖擊力
動量是質量和速度的乘積。質量是個標量;速度有大小有方向,是個矢量。標量和矢量的乘積還是矢量。因動量是質量和速度的乘積,所以物體的動量是:

物體與另一物體碰撞需要一定的時間,在此段時間內的平均加速度為速度的變化除以碰撞時間:

按照牛頓第二定律力是質量和加速度的乘積,因而物體受到的沖力為:
由上式可見沖擊力和速度差成正比,和質量成正比,和碰撞時間成反比。平均沖量為:

我方質心初速度為v0,見圖二。當我方完成攻擊時仍然要平穩,所需條件是重心沒越過前腳時速度為零。假設質心作勻減速運動,由(7)式得:

其中ap是平均加速度。設在路程中速度減為為零。從運動學角度講,物體在路程L0上作勻減速運動時有:

解(8-9)我們得到距離、初速度和平均加速度的下式關系:

在太極拳推手中,當我方用手(或其他肢體)攻擊對方時,通常是由“曲蓄”而“直發”。這時在手和上體之間有一個相對運動,其原理與炮擊相類似都遵循了動量守恒原理。炮擊時,炸藥爆炸產生的強大動能使原來沒有速度的炮彈和炮身同時獲得動量,炮彈獲得一個向前的動量,炮身獲得一個等量反向的動量。因炮彈的質量遠小于炮身的質量,所以炮彈高速向前,炮身低速向后。同理,推手是人體肌肉放能,手因質量小而快速向前,腳以上身體其余部分因質量大而低速向后。
由此,假設手的初速度是vj,手運動的距離是Lj,手的平均加速度是aj,于是,類似于(10)得下式:

本文假設手的質量是mj,手的相對運動產生的攻擊力為mjaj。這里手的質量是個模糊概念。因為手在向前運動時并沒有完全和上體隔離,其數值難以精準確定。
二、人體動力學分析
(一)人體平衡與運動的動力學條件
按照人體的平衡和運動應滿足動力學定律和方程的要求,先對我方隔離體作力學分析。如圖2所示,將人體簡化為一個平面剛體,將所有外在因素簡化為外力。這樣:
在垂直方向,諸力平衡:

在水平方向,由牛頓第二定律得:

將牛頓第二定律運用于轉動,引申出轉動定律:剛體所受的對于某定軸的合力矩等于剛體對此定軸的轉動慣量與剛體的角加速度的乘積。圖2中重力線與地面的交點是O,取定軸為通過O點垂直于紙面的直線。水平力和力高Hj形成的力矩逆時針;前腳支撐力Nq和前腳距離Lq形成的力矩逆時針;后腳支撐力Nh和后腳距離Lh形成的力矩順時針。加速度ap向左,角加速度逆時針。人體的轉動慣量是將這些條件代入轉動定律,我們得到:

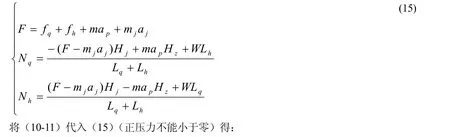
將(13)代入(14)并作一些組合,,得出:

其中mpa是使質心減速需要的力,由于質心和接手有一個高度差第1項可以看成是質心減速力對高度差形成的力矩,簡稱為質心力矩;第2項是摩擦力對接手高度的力矩;第3、4項是正壓力對質心的力矩。這些力矩共同作用達到人體動力平衡。由此可見質心力矩將對摩擦力和正壓力的分配產生影響。通常接手和質心的高度差不是很大,所以對諸力的影響也不是很大,當接手和質心高度相等時該力矩消失。由公式(14)中質心力矩和前腳力矩同號,可以推斷出質心力矩的存在能夠減小前腳的壓力。但這將使前腳失根臨界條件提前發生,下面的算例也證實了這一點。為了減小這個負面影響,太極拳要求無論是習練還是實戰都要做到沉肩垂肘,不要讓接手處和重心有太大的高差。
上式中使手減速的力mjaj并不出現,因而該力對正壓力和摩擦力的分配沒有影響。下面的算例也證實這一點。
解方程組(12-14)得:
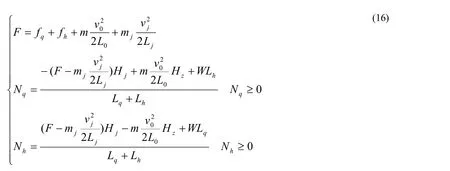
由(16)式第一式可知,我方給對方的攻擊力由三部分組成:摩擦力、整體的沖撞力和后助沖撞力。
整體運動的動量和對方碰撞能夠形成對對方的沖擊力,并將一部分動量傳給對方。質心的運動靠腳底的摩擦力來加速,通過加速積累成速度,而使整體具有動量。因而整體的沖撞力仍然來自于腳底,符合《太極拳論》中“……其根在腳,發于腿……”的論述。但是動量積累后有其獨立性。設想突然將摩擦力撤走,該動量仍然會和對方碰撞而產生沖擊力。這里要說明的是沖擊力和直接傳遞來的力的瞬間效果是不同的。
手的動量和對方碰撞也形成對對方的沖擊力,也將一部分動量傳給對方。手的動量是靠上體的后助形成的,符合“……曲中求直,蓄而后發。力由脊發,……”的論述。我方可以力由脊發、力由腰發、力由胯發,等等。和對方接觸的可以是手、臂、肘、肩、胸、背等等。這種碰撞力發自于肢體間的相對運動,和地面對腳的摩擦力沒有直接的關系。為產生這種沖擊力需要把全身練成一個彈性體,全身各部位都應有收縮和反彈的功能。用拳論的語言是全身各部位都應有蓄發功能。
上述分析表明了太極拳運動中三種力的力學成因。一是起于腳底的力需要通過身體各部位的接力,傳遞到攻擊肢體,所有中間部位都要能夠保持相對固定的形狀,不能垮下。這是一種整勁是全身的功夫,練樁功對此很有幫助。二是整體沖撞力的釀成要靠全身運動來造就質心的速度。三是后助沖撞力的生成需要全身各部位的相對運動來造成攻擊肢體的速度。這三種力都來自全身功夫,這是太極拳全身運動的力學證明。
在太極拳運動的力學分析中,《太極拳發勁的動量轉遞解析》一文[6]54-69將勁定義為動量, 并將勁法定義為:人體動量的有效合成與使用。本文將內勁定義為:人體動量的合成與力的傳遞功能。將發勁定義為:改變人體的動量。文中還研究指出,動量是通過內力加速肢體來實現的。[6]54-69見圖8,想象把腿分成很多段,在假象斷面處有內力作用。這里稱其為內力是因為我們把人體作為研究的體系,而內力是體系內部的力。外部對體系的作用就稱為外力。如圖8所示,摩擦力是外力;內力1、內力2和內力3是內力。作用于腳上端的內力1和作用于小腿下端的內力大小相等方向相反。這樣如果我們研究腳和小腿的組合物時,內力1就不用表述出來。
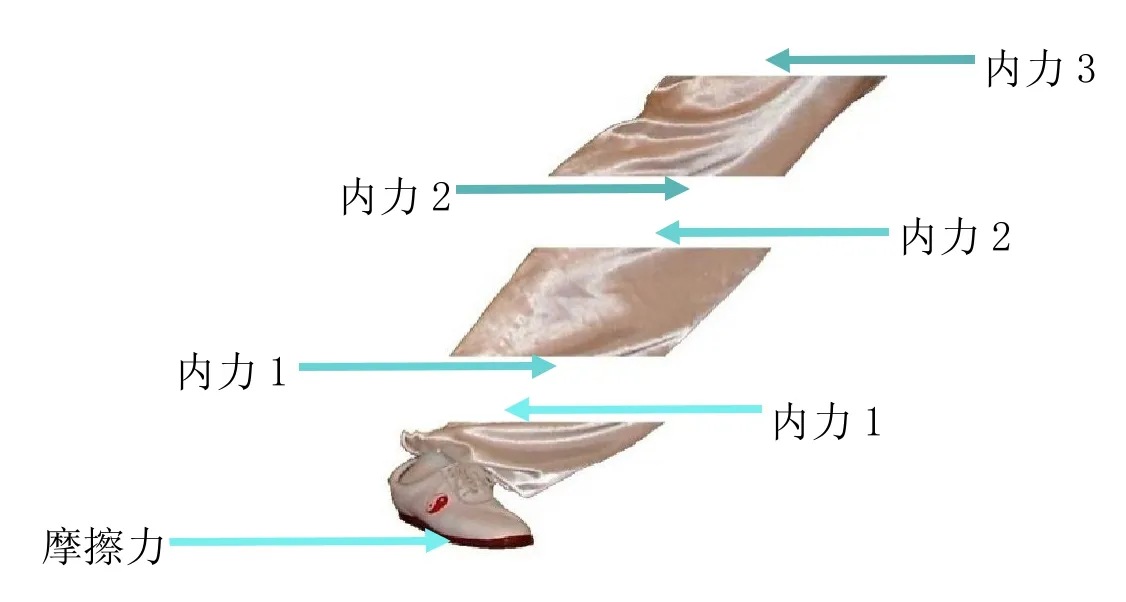
圖8 肢體隔離體
人通過食物和呼吸獲取營養,合成為化學能量,進而轉換成肌肉的機械能。太極拳運動中的發勁主要是指通過肌肉發放機械能,也稱放能。放能產生內力,圖8中內力1和內力2使小腿加速,因而形成動量。如果內力1大于內力 2,小腿將獲得前傾的加速度。所以內力是媒介,而力的傳遞是通過內力的接續來實現的。在特殊情況下,人體靜止,小腿沒有運動,這時內力1和內力2大小相等方向相反。也可以說內力1傳遞到內力2,而內力2將繼續向前傳。可見,力的傳遞在人體靜止時仍然存在,當然,人體加速時力的傳遞也存在。小腿下端的內力1的一部分傳遞到小腿上端變成了膝部下端的內力2,另一部分用來加速。
發勁與有勁不同,發勁是指要改變人的運動狀態,也即改變人體的動量(本文已經把勁定義為動量),要通過一定的方法。例如,太極拳講究的中掤、捋、擠、按、採、挒、肘、靠等八種勁法,就是發勁的具體方法。而有勁是指人有一定抗拒外力或推拉重物的力量,不一定和動量積累有關。例如有的人被推拉時不為所動,能夠與對方處于對抗狀態,這是一種有勁的表現。因為雙方基本是一種靜止狀態,沒有位移和速度變化,也不像太極推手那樣用化解的技法抵抗住對方的攻擊。要能抗住對方的推力需要有兩個條件:其一是人體要能夠保持形狀,力學上把人體簡化成剛體;其二是人體的隔離體分析要符合力學平衡條件。
(二)腳底打滑的臨界條件
腳底打滑是習練太極拳的大忌,不但影響自身技術水平發揮,而且極易成為對方攻擊的機會。防止腳底打滑,即做到腳底不打滑的必要條件是水平外力不能大于摩擦力的最大值,見(2)式。這個條件也可表述為:水平力和正壓力的合力線要在摩擦角內。摩擦角θ的定義是:摩擦角的正切是最大摩擦力和正壓力之比,該正切等于摩擦系數。以前腳為例,見圖9—圖11:
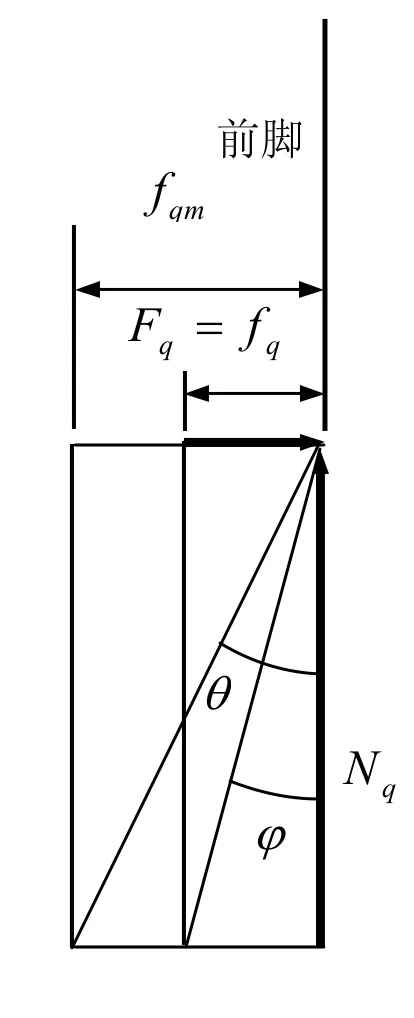
圖9 力線角<摩擦角
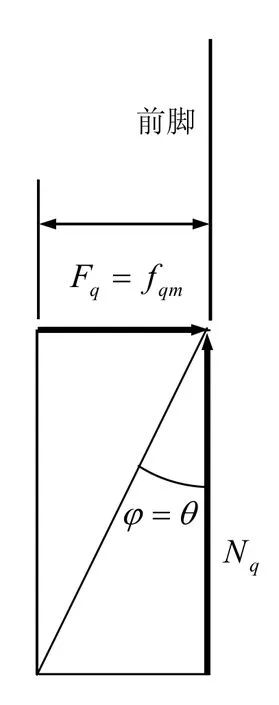
圖10 力線角=摩擦角
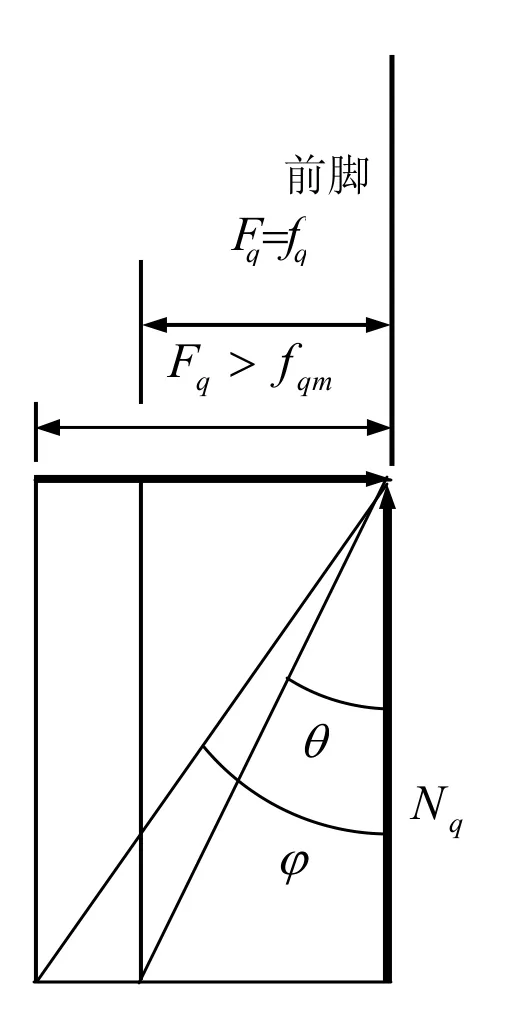
圖11力線角>摩擦角

式中 fqm是最大摩擦力。
力線角φ的定義:力線角的正切是水平力和正壓力比,即:

因此,打滑的臨界條件是:

圖9和圖3對應,符合條件φ<θ,不打滑。圖10和圖4對應,符合條件φ=θ,臨界。圖11和圖5對應,符合條件φ>θ,打滑。
摩擦角和腿的方向沒有直接關系。腿(其他肢體也一樣)能承受縱向力和切向力,所以能傳遞和腿縱向不同的力。
上面的討論對后腳也成立。而且前后腳的力線角是一樣的。即:

如果一只腳的支撐力為零,則重力完全由另一只腳承擔。如果一只腳的摩擦力為零,摩擦力也完全由另一只腳承擔。這樣,將(20)式代入(12)式(力線角的和摩擦角都用正切定義),得:

由方程(21)可知,兩腳的摩擦力之和必需小于重力和摩擦系數的乘積時腳才能不動。由此我們得出腳底不打滑條件:水平外力不能大于總摩擦力的最大值。
(21)還說明總摩擦力和重力成正比。重力越大,摩擦力也越大,可提供更多水平攻擊力。重力還將力線角變小,進一步減小打滑的機會。所以大個子在推手中占優勢。
上述公式討論的是靜摩擦狀態下的腳底打滑臨界條件。一旦超過這個臨界條件,腳就會相對于地面打滑。一旦打滑,就進入了滑動摩擦狀態。一般情況下,滑動摩擦系數小于靜摩擦系數,即進入滑動狀態時會突然失去一部分摩擦力而加速打滑狀態。所以打滑的可逆性差,打滑可能最終導致失穩。
將(21)(10)(11)式代入 (13)式,得:
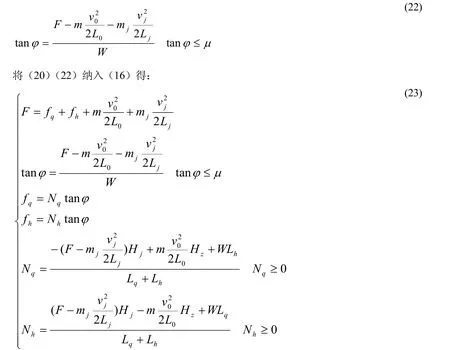
需要注意的是,摩擦角和平衡角是完全不同的概念。摩擦角闡述了摩擦力的性質及其在傳力中的地位,平衡角定義了重心和支撐面的關系。
令(23)第2式中力線角等于摩擦角,可以得到打滑的臨界條件:

(三)失根的臨界條件
失根是太極拳的一個用語,始于腳底騰空,這時腳底正壓力為零,是人體失穩的先兆。在太極拳推手中,往往是誰先失根誰就失敗。為了有效控制失根,太極拳在訓練和競技中采取了許多方法和措施,從力學的角度講,就是要保證任何一只腳的支撐力不能是負值。
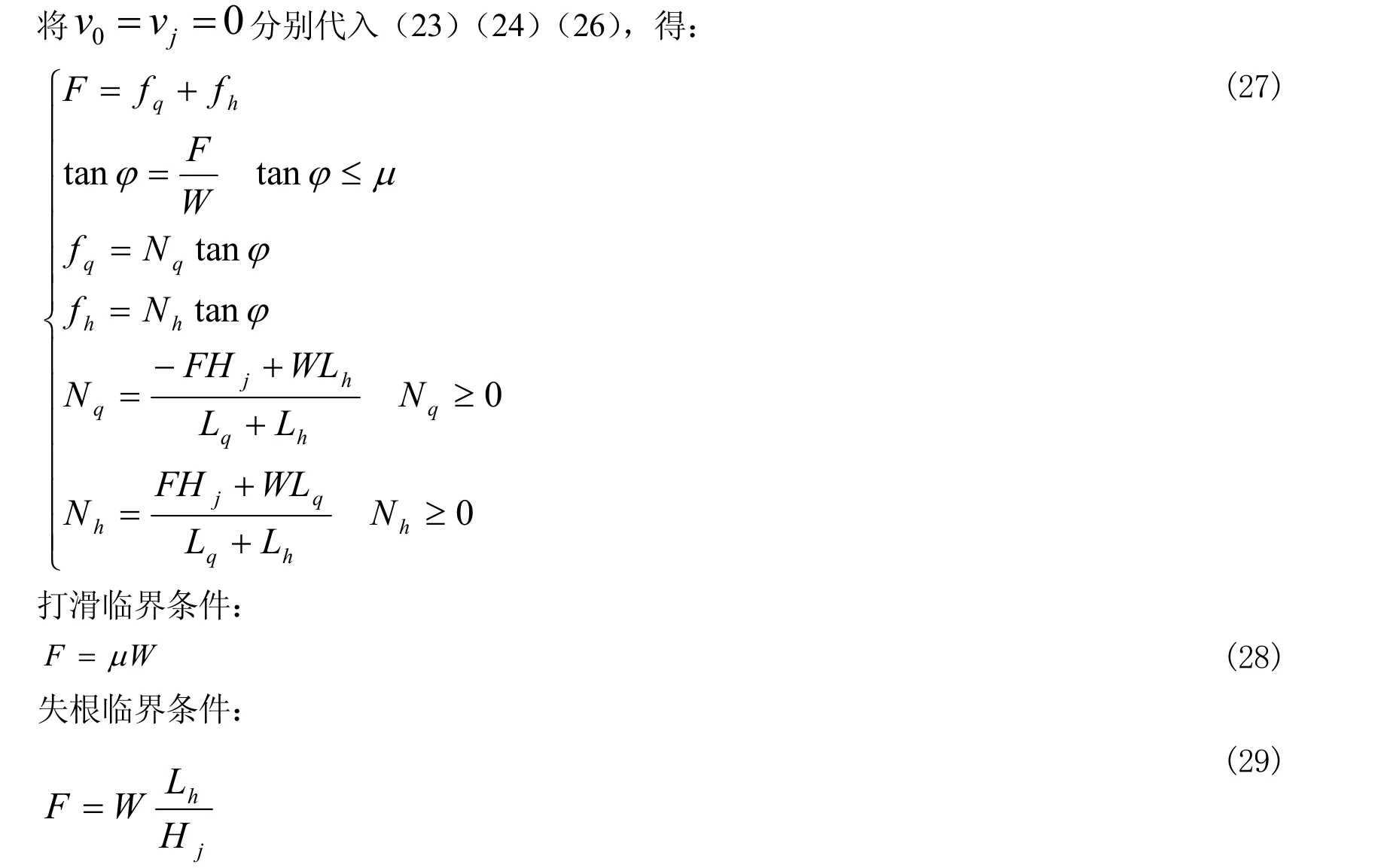
(23)是用于推導人體平衡和運動的動力學條件及其相互關系,設水平外力為零、人體速度為零,則(23)式變為:

(25)式中,因為沒有水平外力,摩擦力也不復存在。(1)式是最大摩擦力的計算公式。腳底摩擦力隨著承重量大小變化,并于水平外力密切相關,但不超過(1)的量值。比較(23)第5式和(25)第5式可以看出水平外力將減小前腳的承重量;比較(23)第6式和(25)第6式可以看出水平外力將增加后腳的承重量;由(25)第5和第6式可見,沒有水平力時,兩腳的承重量和兩腳到重心的水平距離成反比。如果水平外力從零開始增加,則前腳的承重量逐漸減小,后腳的承重量逐漸增加,兩腳底都有了摩擦力。當前腳的承重量減小為零時,前腳支撐力Nq也為零,前腳也就不再得到地面的支撐,處于失根的臨界狀態。如果此時將前腳提起,把精力集中在后腳上,就會致使前腳失根。令(23)第5式右端為零,我們得到失根的臨界條件:

如果水平外力是拉力的話,后腳的支撐力會隨外力增加而減小,當后腳支撐力為零后會導致人體失穩。為保證人體的基本穩定,在(23)式第5和第6式中設了限制條件,也得出了保證腳底有根的條件:任何一只腳的支撐力不能是負值。
太極拳對腳與地面的接觸非常講究,尤其要求腳落地要生根。從力學上講,腳和地面之間的相互作用力就是根,有作用力就有根,作用力大根就牢,作用小根就差,作用力為零時根就消失了。
(26)式表明推手時雙方接手部位越高,重心離后腳越近,前腳就越容易脫地,以至形成失根臨界狀態。這種臨界狀態并不代表人體已經失穩,因為這時還有水平外力(對方在接手處的力)的存在,所以人體仍然處于平衡狀態。但是,這種臨界狀態極易給對方造成進攻機會,易被對方引進落空。一是對方突然撤力,水平外力為零,假如我方毫無思想準備,前腳極易在慣性作用下驟然落地,處理不當會屈曲前腿而失穩。二是對方施加一個反向水平力,那我方的平衡將處于危機狀態。
因此,太極拳要求前腳在支撐力為零的情況下,一般不要離地,以有效遏制對方的引進落空戰術。如果對方突然撤力,我方因前腳從來沒離開地面而可隨即獲回支撐力。如果對方施加反向水平力,我方也因此可以隨即獲回支撐力而應對自如。
當水平外力超(26)式的臨界值,該水平外力對后腳的力矩大于重力對后腳的力矩,人的上體將首先被合力矩向后掀,人的重心也隨之被向后推,如果重心被推到后腳的后面,整個身體將失穩,甚至倒地,見圖 12。采取身體前移、降低重心、增大支撐面和穩定角等措施可以防止或緩解這種狀態的出現。推手出現頂牛狀態時,雙方做出的彎腰、下蹲、兩腳前后拉開、伸遠后腳的動作就是這些措施的具體運用。
一般情況下,這些應對措施僅在雙方體重相差不大時才有效。因為一方給另一方的水平力均來自對方的摩擦力,而這個摩擦力又是在相同摩擦系數下和重量成正比。
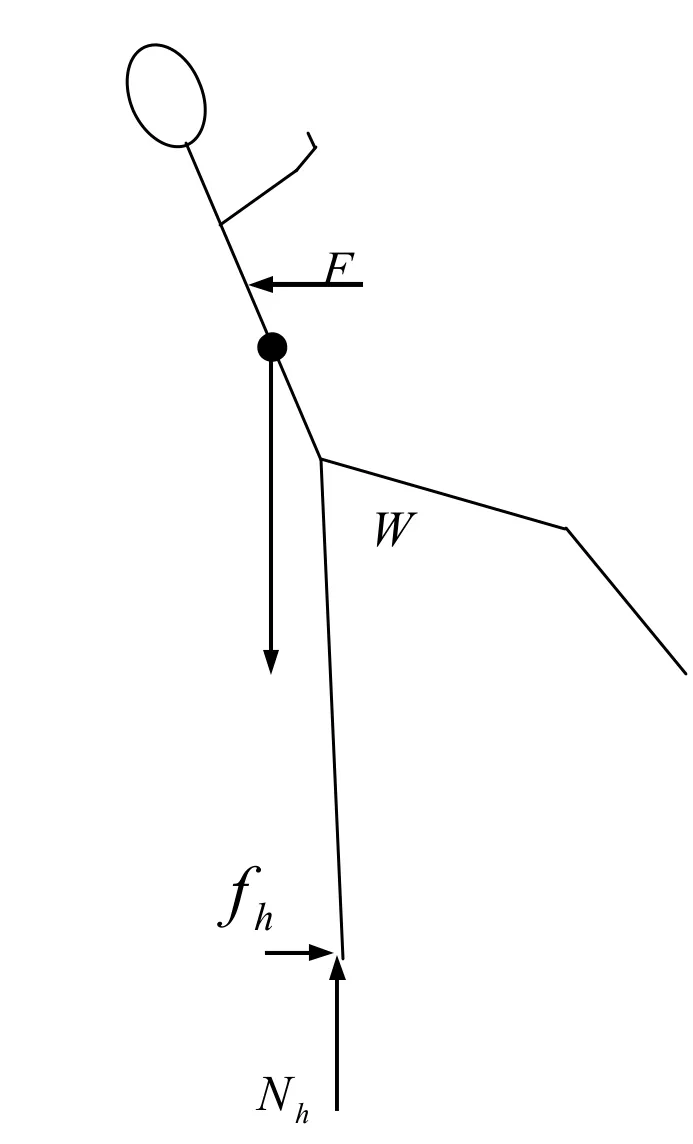
圖12 最終失穩
三、弓步的水平攻擊力計算與分析
(一)只有傳遞力的特例
弓步是太極拳中最常見和最常用的步形,弓步的水平攻擊力直接影響太極拳推手的質量。我們先用前文推導出的打滑臨界條件公式和失根臨界條件公式,計算弓步在軀干和手都沒有速度情況下的傳遞力和攻擊力的性能。
將(30)假設的弓步數據分別代入公式(27)、(28)、(29)計算出弓步時各力及力線角隨水平外力的變化(表一、圖13)。
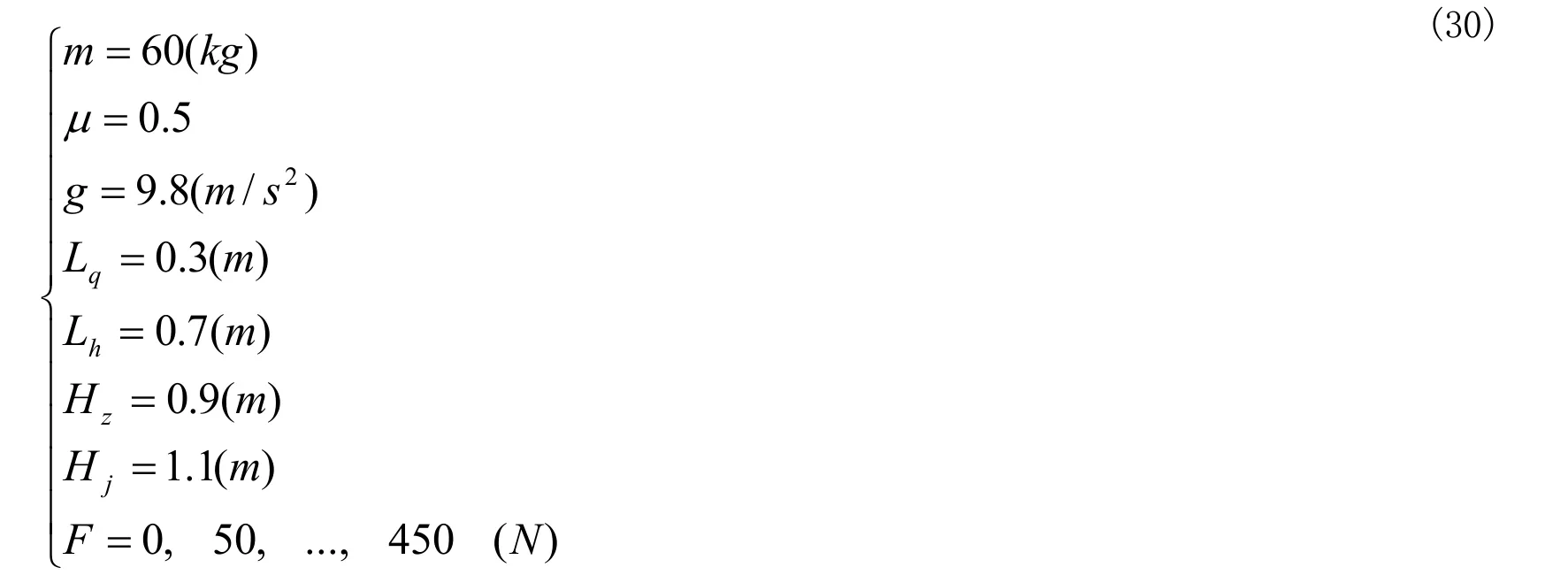
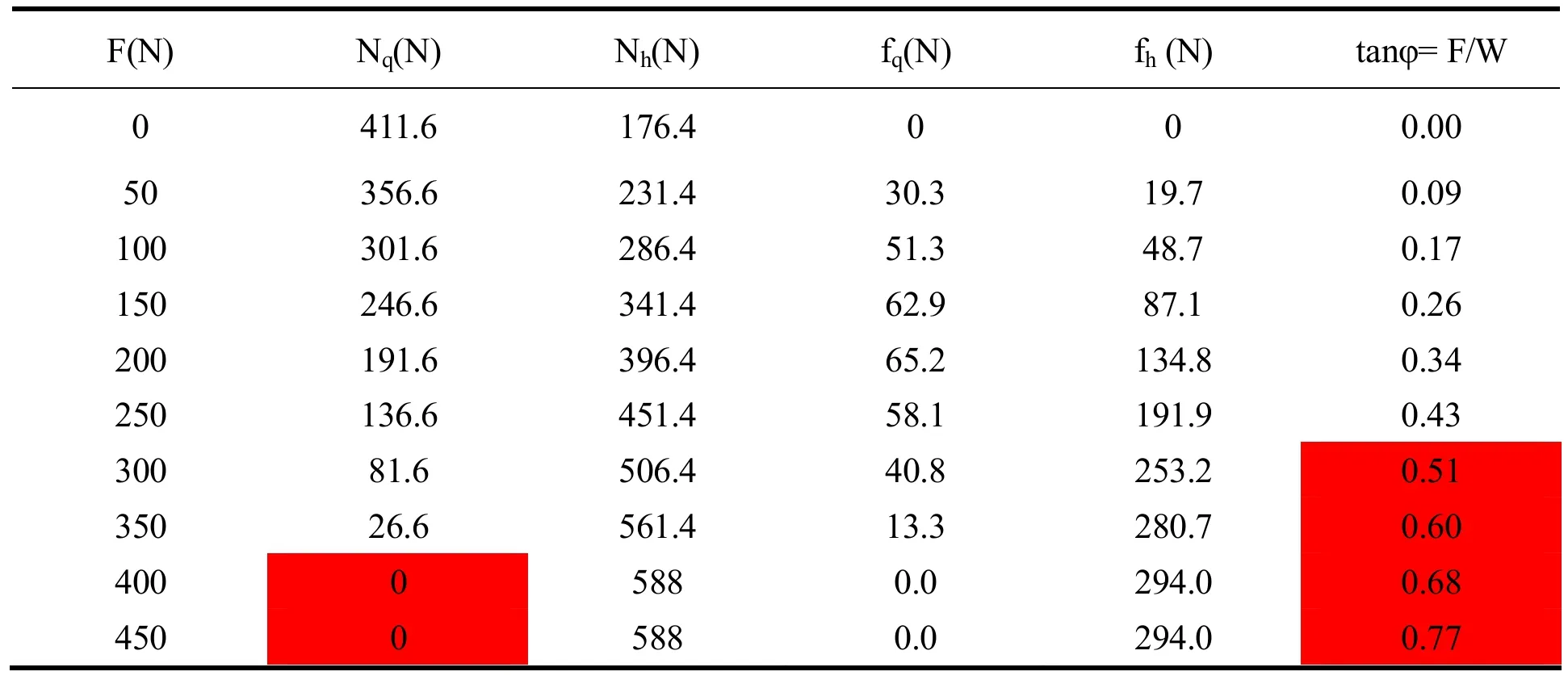
表1 弓步時各力及力線角隨水平外力的變化
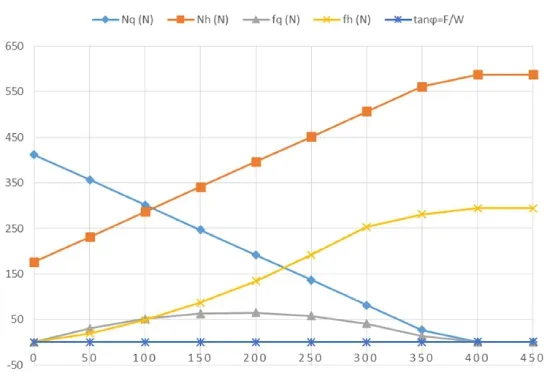
圖13 各力隨水平外力的變化曲線
表1分析:由第1欄和第2欄可見前腳正壓力隨水平外力增加而減小,用(29)式計算可知,當水平外力為374.2時正壓力變成零,這是失根的臨界點。由第一欄和第6欄可見力線角隨水平外力增加而增加,用(28)式計算可知,當水平外力為294時力線角等于摩擦角,這是打滑的臨界點。由上述可知,弓步在只有傳遞力的情況下腳底打滑先于失根,所以該弓步將以打滑而失效。
圖13是各力隨水平外力的變化的曲線。水平軸是水平外力,單位是牛頓(N);豎直軸是各力的數值,單位也是牛頓(N)。
圖13分析:當力線角增至摩擦角后(tanφ≥μ),水平力將大于摩擦力。摩擦力等于正壓力和摩擦系數的乘積。(27)變為:

(31)式第1式是說,水平外力大于摩擦力的部分將使人體加速而滑動,加速使人體最終滑出賽場。用(31)式計算表一中自F=300N 以下各行(至下一個臨界條件)。當前腳正壓力遞減至零時,后腳正壓力遞增至588牛頓。之后,當水平力大于(29)式右端后,兩腳正壓力不變,后腳承擔全部摩擦力的最大值,(31)式就變為:

(32)式第1式是說,水平外力和其高度的力矩大于重力和后腳距離的力矩,力矩的差值將使人體加速,直至被掀翻。
用(32)式計算表一中自F=400N 以下各行。可見,前腳摩擦力增至峰值后遞減,當該腳正壓力為零后摩擦力也為零,此時后腳摩擦力增至294N后保值不變。294N就是全部由重力產生的摩擦力,等于重力和摩擦系數的乘積。
(二)人體動量的撞擊力對弓步攻擊力的影響
太極拳是“一動俱動、一到全到”的全身運動,正如太極拳論所說“其根在腳,發于腿,主宰于腰,形于手指,由腳而腿而腰,總須完整一氣”。人體的剛體模型給出了這種運動的力學基礎。太極拳“一動俱動、一到全到”的技術要求是對人體動量的合理使用,就是要求人體各部位能夠做到協調聯動和同時到位。
人體的整體動量通常稱為人體動量,主要是指平動動量和角動量(旋轉動量)的綜合效應。在太極拳中腰主轉動,造成整體的角動量;腿推動上體,造成整體的平動動量。這兩者構成人體的整體動量,能夠產生很大的沖擊力。
為簡化計算,本文把人體動量表示為人體質量和質心速度的乘積。太極拳“一動俱動、一到全到”的技術要求,就是要求人體各部位能夠做到協調聯動和同時到位。這是對人體動量的合理使用。
設質心有一初速度v0,手沒有速度,將代入(23)(24)(26)得:

(36)假設的弓步數據加入了質心的參數,將其分別代入公式(33)、(34)、(35)得出弓步時人體動量撞擊力對攻擊力的影響(表二、圖14)。
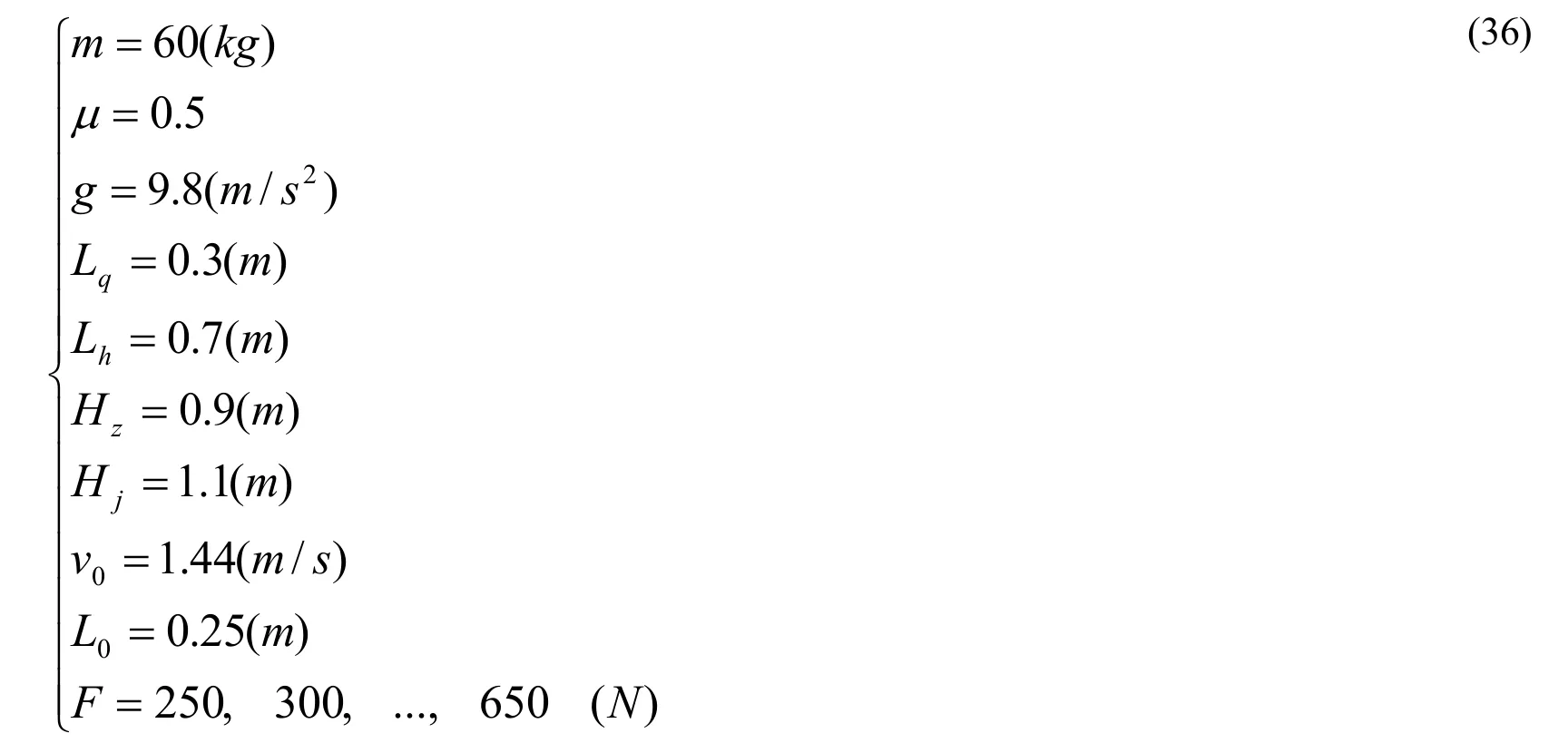
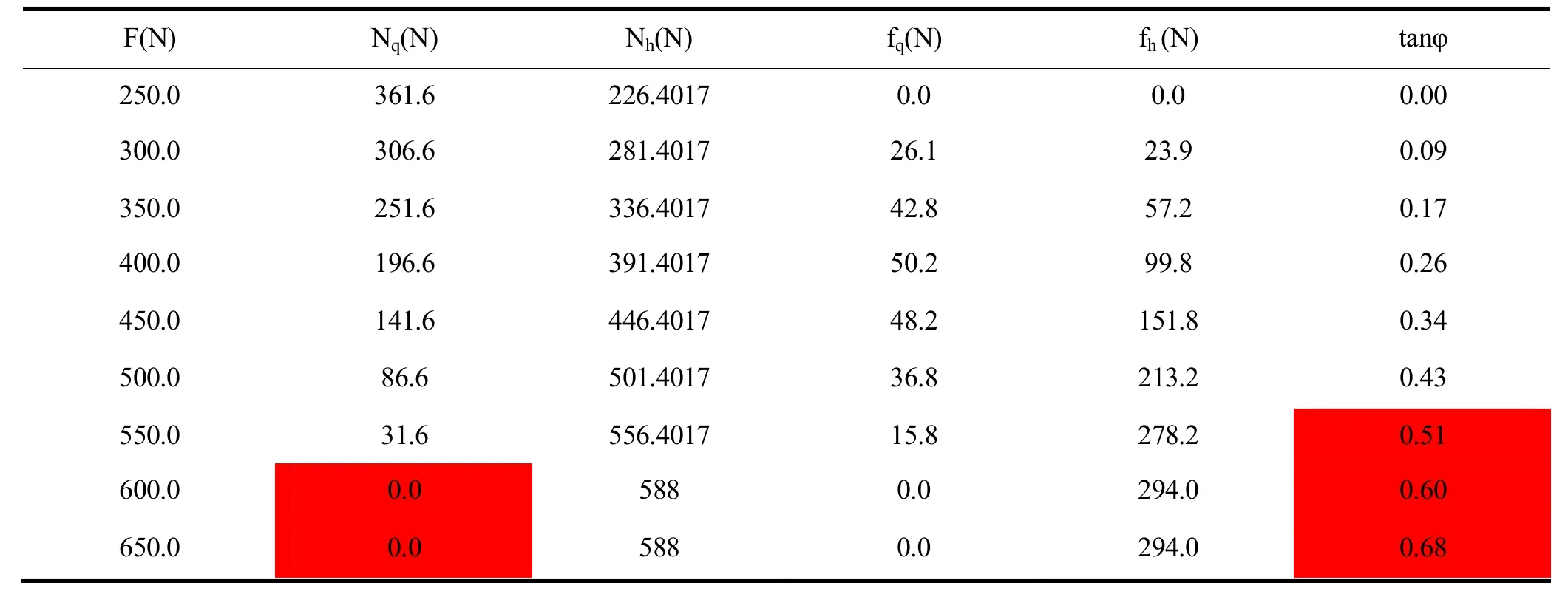
表2 弓步時人體動量撞擊力對攻擊力的影響
表2分析:由第1欄和第2欄可見前腳正壓力隨水平外力增加而減小,用(35)式計算,水平外力是為578.7時正壓力變成零,這是失根的臨界點。由第1欄和第6欄可見力線角隨水平外力增加而增加,用(34)式計算,當水平外力為544時力線角等于摩擦角,這是打滑的臨界點。由上述可知,帶有撞擊力的弓步在人體動量作用下,相比較只有傳遞力的弓步,雖然提高了250牛頓的攻擊力,也縮小了打滑與失根時水平外力的差,但仍然是打滑先于失根,所以該弓步將以打滑而失效。
圖14是引入質心沖擊力后各力隨水平外力的變化的曲線。水平軸是水平外力, 單位是牛頓(N)。豎直軸是各力的數值,單位也是牛頓(N)。
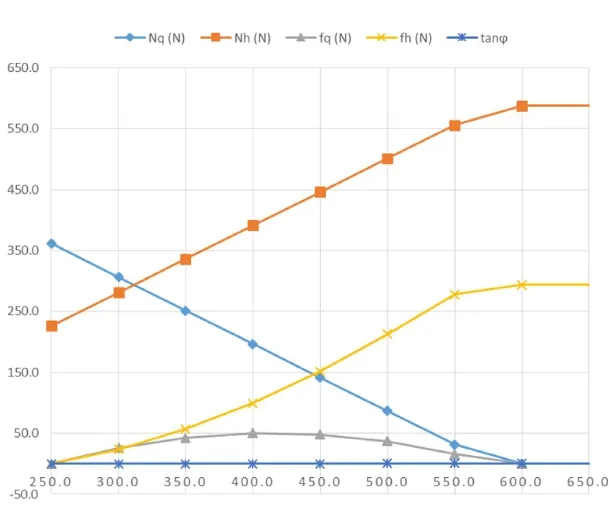
圖14 引入質心沖擊力后各力隨水平外力的變化曲線
圖14分析:將圖14與圖13比較,圖14的曲線大致地向右拓展了250牛頓。這250牛頓就是引入質心沖擊力的結果。也就是說,運用全身的質心運動使弓步的總攻擊力增加了250牛頓。值得注意的是,由于引入了質心沖擊力,就有了質心力矩的存在,這就致使前腳相比只有傳遞力時提前失根(表一失根臨界點是374.2牛頓,表二失根臨界點是578.7,如果減去質心沖擊力250牛頓,僅為328.2牛頓)。
當力線角增至摩擦角后,摩擦力等于正壓力和摩擦系數的乘積,(33)式就變為:
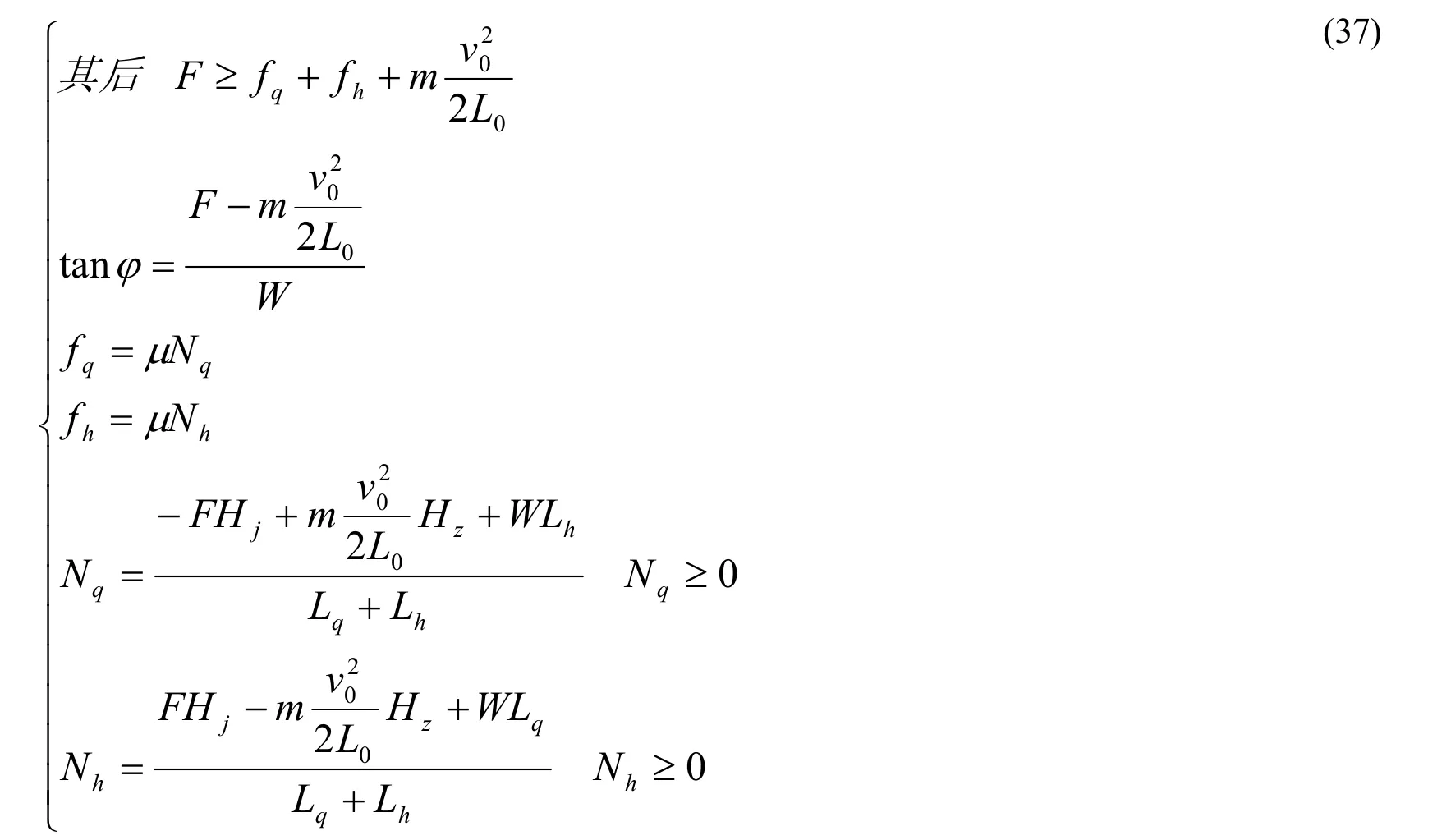
用(37)式計算表二中自F=550N以下各行(至下一個臨界條件)。可知,當水平外力等于(34)式右端時前腳正壓力遞減至零,后腳正壓力遞增至588牛頓。588牛頓正好是重力的全部。其后,當水平外力大于(34)式右端時,(37)式就變為:
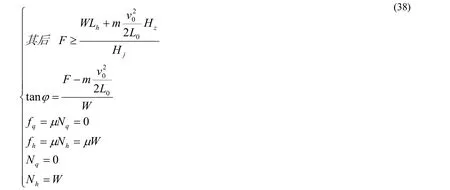
用(38)式計算表二中自F=600N以下各行。可知,前腳摩擦力增至峰值后遞減,當該腳正壓力為零后摩擦力也為零,此時后腳摩擦力增至294N后保值不變 。294N就是全部由重力產生的摩擦力,等于重力和摩擦系數的乘積。
(三)爆發力對弓步攻擊力的影響
前面討論了人體整體運動對攻擊力的影響,這里將討論肢體末梢的運動對攻擊力的影響。(23)式中第一式第4項是手的綜合動量造成的沖擊力。我們知道,肌肉放能可以使手和軀體間產生相對運動,軀體和手同時獲得等量反向的動量增量。因為軀體質量大手質量小,所以軀體的速度低,手的速度高。高速運動的手會給對方造成很大的沖擊力,太極拳界稱此為短勁[5]或“鞭梢勁兒”。在拳論中稱此為“……行于手指……”,本文稱為爆發力或肢體相對動量。為簡化計算,本文把肢體相對動量表示為手的質量和速度的乘積。
設手有一個初速度,符合公式(23)(24)(26)成立的條件。(39)假設的弓步數據中加入了手的參數,將其分別代入(23)(24)(26)三個公式,計算出弓步時肢體相對動量對攻擊力的影響(表三、圖15)。
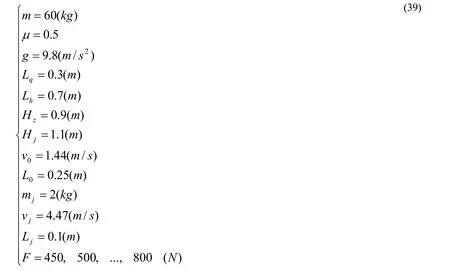
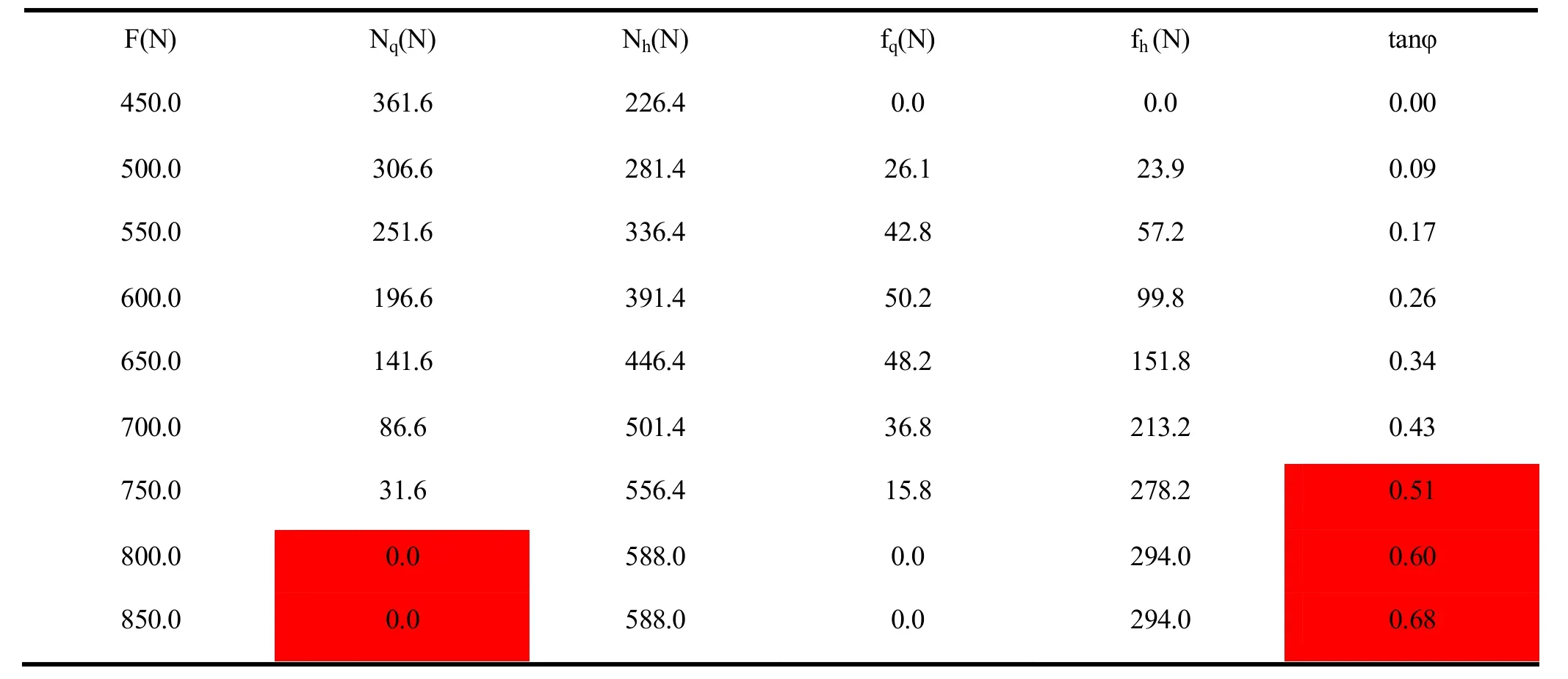
表3 弓步時肢體相對動量對攻擊力的影響
表3分析:由第1欄和第2欄可見前腳正壓力隨水平外力增加而減小,采用(26)式計算,當水平外力是778.7時正壓力變成零,這是失根的臨界點。由第1欄和第6欄可見力線角隨水平外力增加而增加。采用(24)式計算,當水平外力是744時力線角等于摩擦角,這是打滑的臨界點。由上述可知,帶有爆發力的弓步在肢體相對動量作用下,相比較只有傳遞力的弓步,雖然提高了450牛頓的攻擊力,也縮小了打滑與失根時水平外力的差,但仍然是打滑先于失根,所以該弓步將以打滑而失效。
圖15是引入爆發沖擊力后各力隨水平外力的變化曲線。水平軸是水平外力, 單位是牛頓(N)。豎直軸是各力的數值,單位也是牛頓(N)。
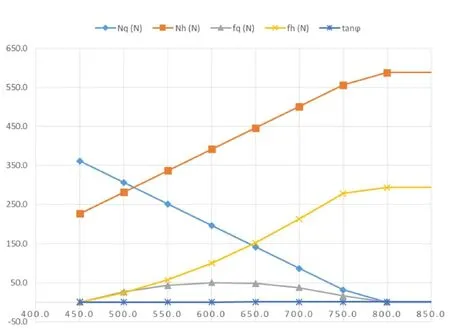
圖15 引入爆發沖擊力后各力隨水平外力的變化曲線
圖15分析:將圖14與圖15比較,圖15的曲線完全向右拓展了200牛頓。這200牛頓就是爆發沖擊力。也就是說,運用爆發發勁使弓步的總攻擊力增加了200牛頓。爆發沖擊力對正壓力及摩擦力的關系沒有影響.
當力線角增至摩擦角后,水平外力大于(26)式右端,摩擦力等于正壓力和摩擦系數的乘積。(23)變為:
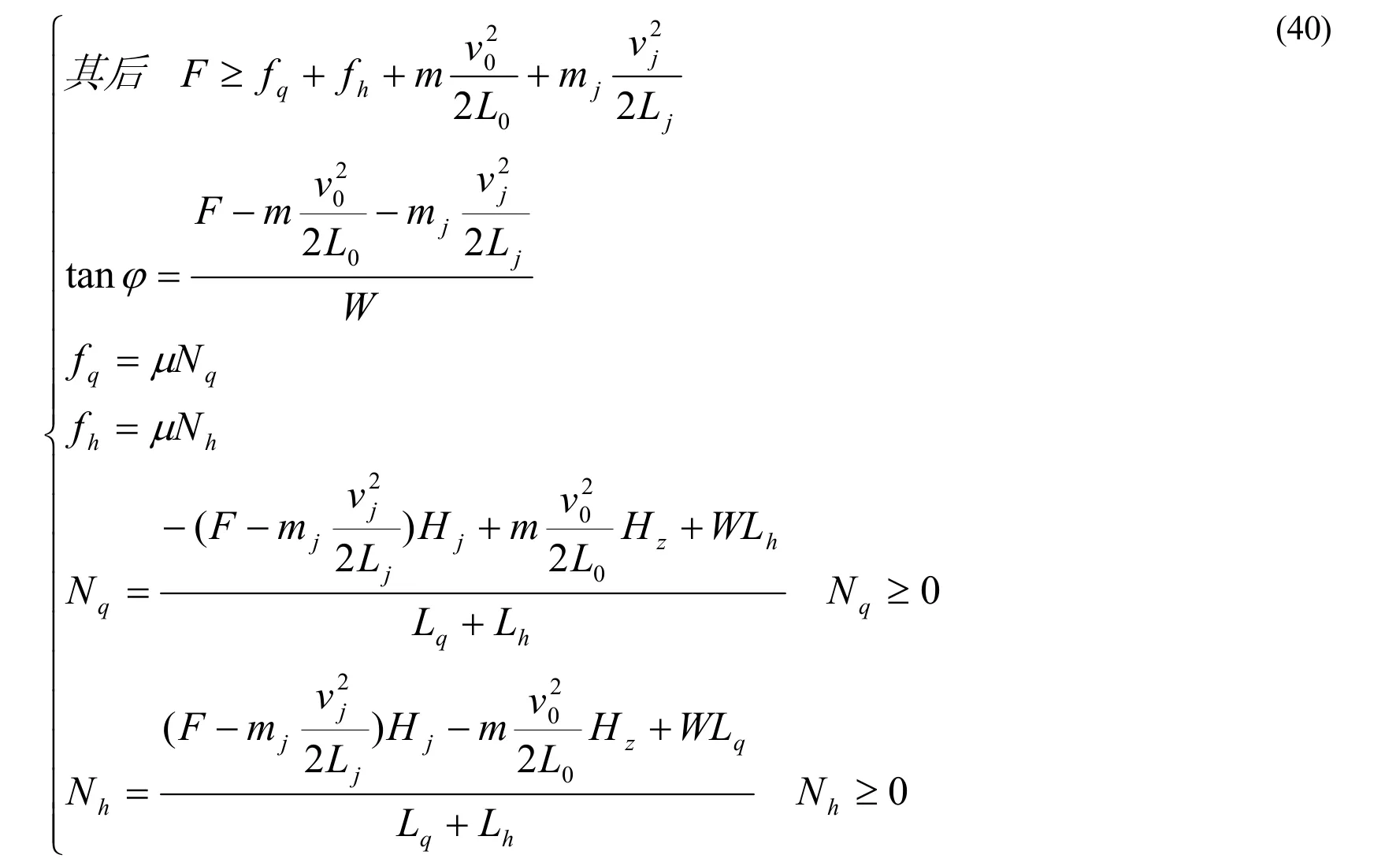
用(40)式計算表三中自F=750N 以下各行(至下一個臨界條件)。可知,當水平力等于(24)式右端時,前腳正壓力遞減至零,后腳正壓力遞增至588牛頓。588牛頓正好是重力的全部。其后,當水平力大于(24)式右端時,(40)式就變為,
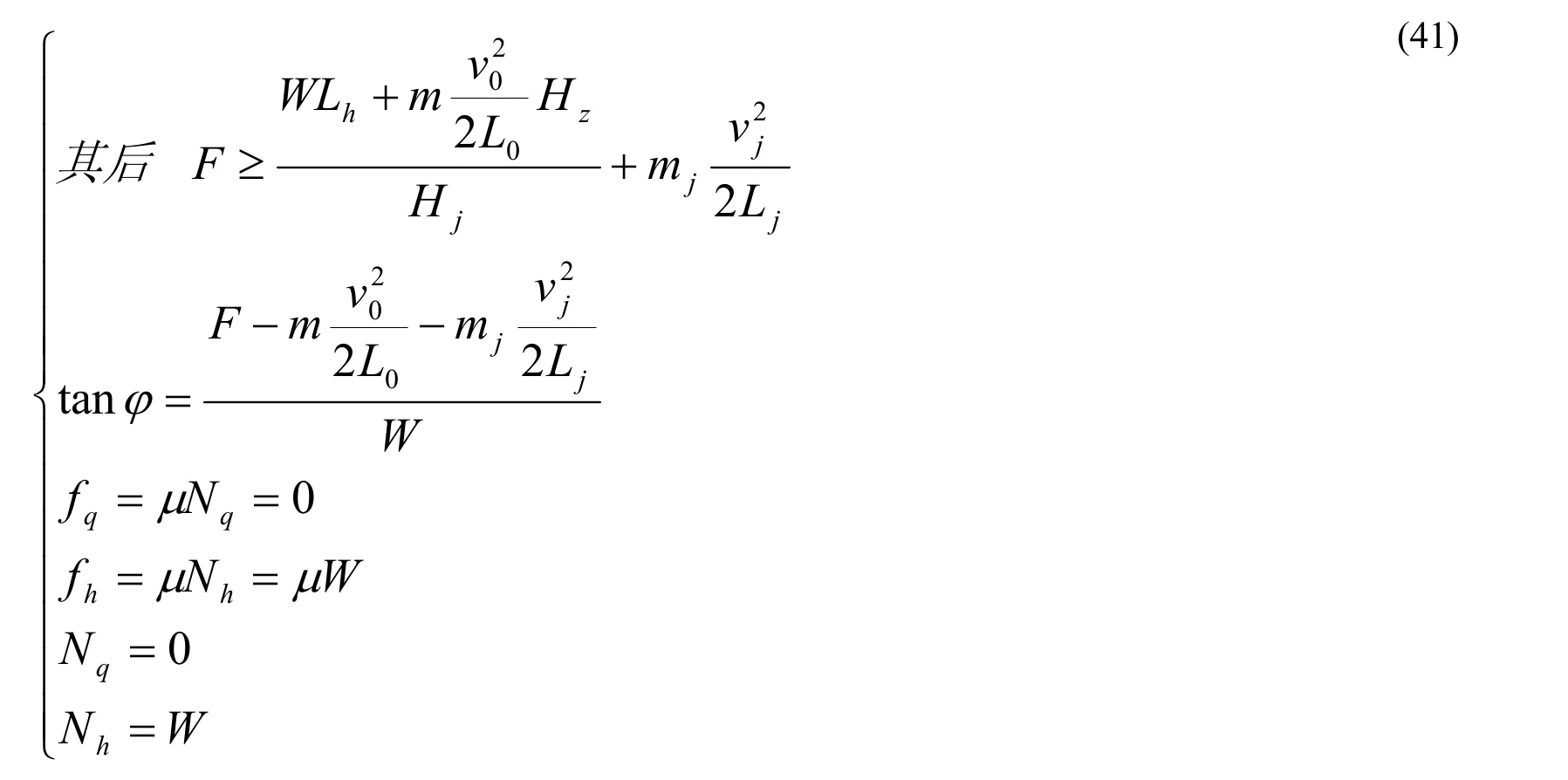
用(41)式計算表三中自F=800N 以下各行。可知,前腳摩擦力增至峰值后遞減,當該腳正壓力為零后摩擦力也為零。當前腳摩擦力為零后,后腳摩擦力增至294N并保持不變。294N就是全部由重力產生的摩擦力,等于重力和摩擦系數的乘積。
四、坐步的水平攻擊力計算與分析
圖16是坐步的人體剛體模型,與弓步的人體剛體模型相比,弓步的重心靠近前腳,坐步的重心靠近后腳。
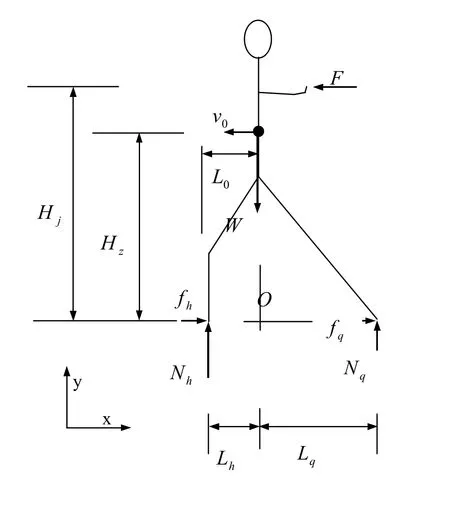
圖16 坐步人體剛體模型
依照弓步的水平攻擊力計算及分析的思路,也是先分析坐步的水平攻擊力只有傳遞力的情況,仍采用公式(27)(28)(29)計算,將(42)中假設數據分別代入其中,計算出坐步時各力及力線角隨水平外力的變化(表四、圖17)、以及打滑的臨界條件和失根的臨界條件。
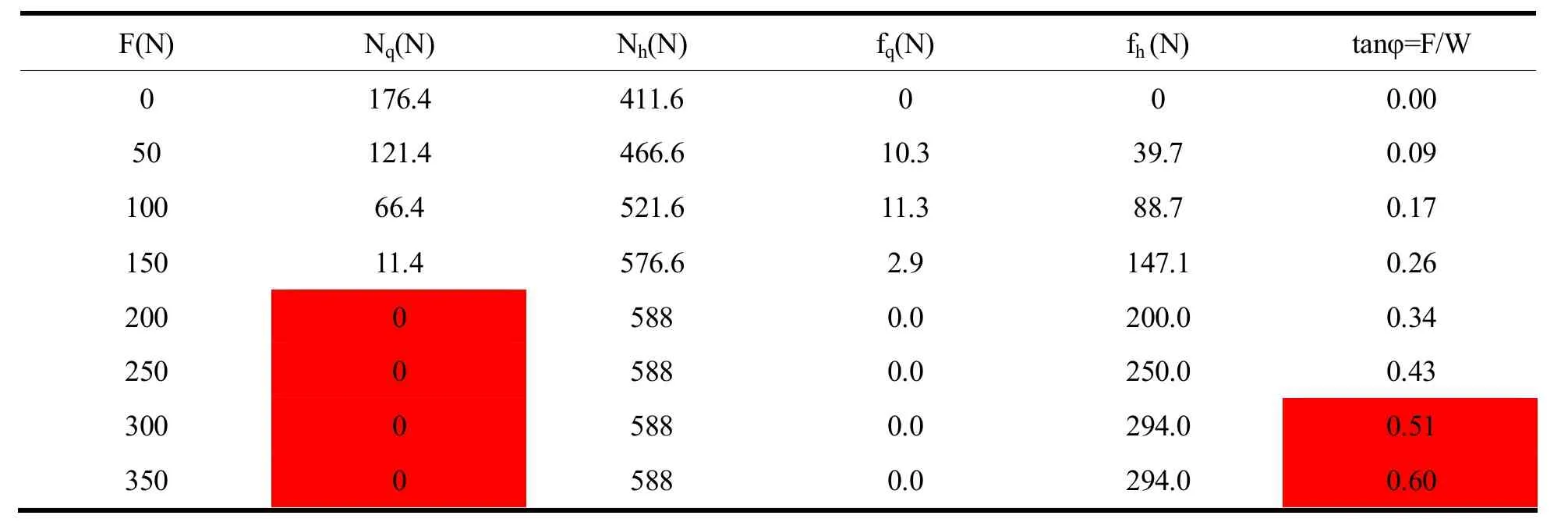
表4 坐步時各力及力線角隨水平外力的變化
表4分析:坐步時失根先于打滑。
圖17是各力隨水平外力的變化曲線。水平軸是水平外力, 單位是牛頓(N)。豎直軸是各力的數值,單位也是牛頓(N)。
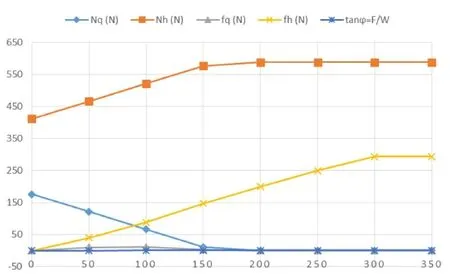
圖17 各力隨水平外力的變化曲線
圖17分析:當水平力等于(29)式右端時,前腳正壓力遞減至零,后腳正壓力遞增至588牛頓。其后,水平力大于(29)式右端時,(27)式就變為:

用(43)式計算表四中自F=200N 以下各行(至下一個臨界條件)。當力線角增至摩擦角后,摩擦力等于正壓力和摩擦系數的乘積,(43)式就變為:

用(44)式計算表一中自F=300N以下各行。前腳摩擦力增至峰值后遞減,當該腳正壓力為零后摩擦力也為零。當前腳摩擦力為零后,后腳摩擦力增至294N并保持不變。294N就是全部由重力產生的摩擦力,等于重力和摩擦系數的乘積。
坐步和弓步相比有兩點不同:一是弓步臨界于打滑,坐步臨界于失根;二是坐步的臨界力遠小于弓步的臨界力。所以,向前攻擊的功能,弓步強于坐步。
五、“發勁如放箭”和“引進落空”技術的分析
“發勁如放箭”和“引進落空”是太極拳的技術要求。“發勁”即是向前攻擊的力,歸于發放;“引進”即是向后拉的力,歸于收引。
力是矢量,向前攻擊的力表示為正值,向后拉的力表示為負值。前文代入正值計算了向前攻擊的能力,現在代入負值計算向后拉的能力。
為計算坐步的拉力,將(42)所設數據中最下一行改設為:

將數據(45)和(42)中前七項分別代入公式(27)(28)(29),可得出各力隨水平外力的變化表格和曲線(此處從略),以及失根的臨界值F=-374.2N 和打滑的臨界值F=-294N。由計算數值可見:打滑先于失根。
為計算弓步的拉力,將(30)所設數據中最下一行改設為:

將數據(46)和(30)中前七項分別代入公式(27)(28)(29),可得出各力隨水平外力的變化表格和曲線(此處從略),以及失根的臨界值F=-160.4N 和打滑的臨界值F=-294N 。
由計算數值可見:失根先于打滑。
表5列出弓步和坐步的臨界性質,表中第2、3欄列出了弓步和坐步的發放性質;第4、5欄列出了弓步和坐步的收引性質;第2行是先發生臨界條件的類別;第3行是臨界數值。

表5 弓步和坐步的臨界性質
表5分析:
第2欄顯示,弓步推發出294牛頓力,然后兩腳打滑,從此不可能提供更大的推力。第3欄顯示,坐步推發出160.4牛頓的力,然后前腳失根,從此不可能提供更大的推力。第2、3欄比較,弓步比坐步更適合用于發勁。
第4欄顯示,坐步收拉出294牛頓力。然后兩腳打滑,從此不可能提供更大的拉力。第5欄顯示,弓步收拉出160.4牛頓力,然后后腳失根,從此不可能提供更大的拉力。第 4、5欄比較,坐步比弓步更適合用于收勁。
人是由肌肉和骨骼組成的柔體,發力時無論是向外推還是向內拉,都是通過變換體型來實現的。人體的剛體模型只是提供了某個瞬時的體型力學分析。發勁宜由坐步始而弓步終,坐步提供前弓的準備,弓步提供發勁的力學優勢。類似的,收勁宜由弓步始而坐步終,弓步提供后坐的準備,坐步提供收勁的力學優勢。采用弓步向前發勁可直攻對方重心,楊式太極拳的主要著式“攬雀尾”中的“擠”是典型的前攻型技術。
采用坐步向后收引或拉動時需要因時而宜靈活運用。如果是有意識化解對方攻勢或以退為進誘使對方失重,都可保持我方不失根;如果對方攻勢很強,或者我方要順勢發放,最好引入橫向作用力,以使對方的攻擊力偏離我方重心。楊式太極拳 “攬雀尾”一式中“按”的前半部就是典型的向后下牽引的引進落空技術,“捋”就是典型的向橫向、向后下拉拽的引進落空技術。
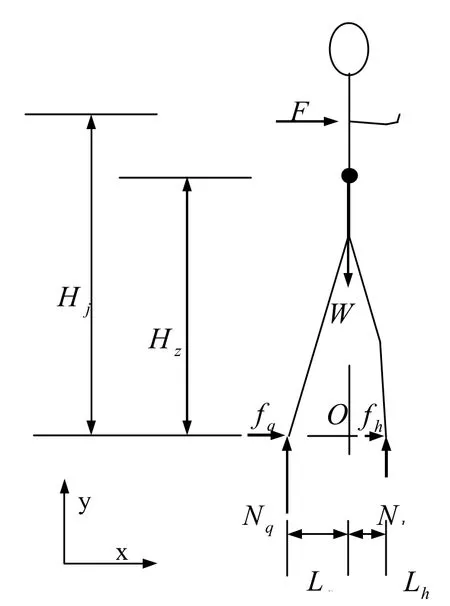
圖18 寬弓步側向剛體模型
六、“牽動四兩撥千斤”的分析
太極拳講求“牽動四兩撥千斤”,這是以巧取勝、以小力勝大力的策略和技術,其中涉及人體側向和縱向的穩定性。
(一)“牽動四兩撥千斤”的橫向效應
圖 18是寬弓步側向剛體模型,借此分析寬弓步側向的抵抗力,也即“牽動四兩撥千斤”的橫向效應。寬弓步側向兩腳之間的距離一般是一肩寬,大約35厘米,通常一腳外撇45度,大約增加了5厘米兩腳間的距離,增強了側向穩定度。這樣,兩腳之間的平行距離,也即弓步的寬度為 40厘米。按三七分,前腳(直腳)到重心橫向距離約12厘米,后腳(弓腳)到重心橫向距離約28厘米。
計算及分析:將(47)中假設數據代入其中公式(27),計算出弓步側向各力及力線角隨水平外力的變化(表6)。
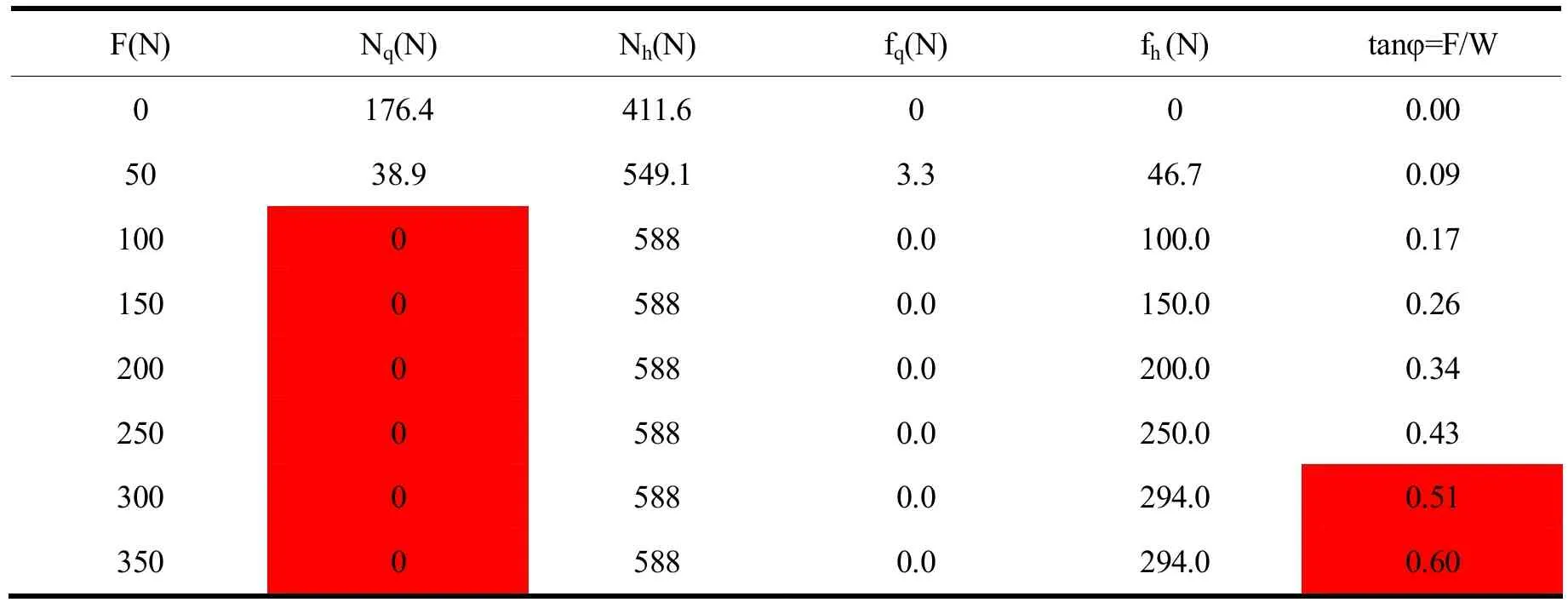
表6 寬弓步側向各力及力線角隨水平外力的變化
由表 6可見失根先于打滑,所只需計算失根值。將(47)式代入公式(29),計算出寬弓步前腳側向失根臨界值為,
弓步正向的打滑臨界值為294牛頓。這表明寬弓步的側向抗力功能比正向功能要差很多。注意這里是直腳失根,因為外力由直腳指向弓腳而把直腳上拔。這就證實了太極拳散打中套住對方的弓腳,從其身體上部向側向攻擊的做法是符合力學原理和巧妙省力、切實可行的。
從以上分析可以推論窄弓步和虛步的側向抗力功能更差,更難以抵擋“牽動四兩撥千斤”的側向攻擊。太極拳的“牽動四兩撥千斤”戰略戰術多是從對方側向或身體中心線一側采用“撥動”的方法,攻擊對方力學意義上的薄弱環節,即快捷又省力。
2、“牽動四兩撥千斤”的縱向效應
參照圖16坐步剛體模型,將(48)中所設相關數據代入公式(33),計算出坐步在質心速度向后時的抵抗力,也即表七坐步速度向后時各力及力線角隨水平力的變化,

表7 坐步速度向后時各力及力線角隨水平外力的變化
由表7可見失根先于打滑,所以只需計算失根值。將(48)代入公式(35)計算出前腳失根的臨界力為,

1.4N相當于我國舊時計量單位的四兩多。
在數據(48)中,減速需要的距離是31厘米,后腳到重心的距離是30厘米。這就是說用1.4牛頓的力通過勻減速運動就能把對方推到其后腳外1厘米處,也就是說四兩外力就可以把對方的重心推出支撐面。圖16人體的質量是60公斤、質心水平初速度為1.417m/s,二者相乘的數值使其產生的較大動量。由于慣性(牛頓第一)定律,人體要保持這個速度。要在靜止時分析人體的平衡狀態,先要把這個動量減到零。根據牛頓第二定律,減速需要力。在本例中千斤力就是這個減速人體需要的力。這個力不是外力,而是自身克服慣性需要的力。四兩撥千斤的意思就是四兩外力推波逐瀾于千斤慣性力。
慣性力產生于自身的動量,不是產生于兩個物體間,只與人體的質量和速度相關。人的自身力量可稱為勁,《太極拳發勁的動量傳遞解析》一文把勁定義為動量,動量可以傳遞。因此,上述例子可以看作是我方將小部分勁(四兩力)適時傳遞給對方,與對方的勁(千斤慣性力)疊加,使對方失根。這里包括了勁的產生和運用兩個方面,是一種太極功夫,需要鍛煉而成。
尤其是勁的運用至關重要,運用的好,可以使自己平衡對方失穩;運用不妥,容易被對方借用導致自己失穩。即使自己單練也要注意,稍有不慎就會使自己失穩。
勁的恰當運用還與對方的狀態密切相關。如果對方能靈活變換自己的速度方向,那我方的四量力可用來防止對方的逆向運動。如果對方向后的速度較大,我方可以乘勢而進,順勢發力,完全可以把對方推出一丈(3米)之外。
試算一例,假設具有爆發力的弓步在發出750牛頓力時將對方向后推了0.3米,并迫使對方重心移到身后(后腳之外)以跳躍式后退,而自身保持穩定。750牛頓的力將對方向后退是所做的功是750(力)×0.3(距離)=225焦耳,這足以使對方后退4米多(一丈以上)。這是基于功的原理,是假設對方每退一步是50厘米,并打滑10厘米。這樣,對方每打滑一次耗能588(重力)×0.5(摩擦系數)×0.1(距離)=29.4焦耳,完全消耗掉225焦耳就要跳出8.6步(225÷29.4),也就是說對方被打出了0.5×8.6=4.3米。可見,歷史上太極拳名家一掌將人打出一丈之外,或將人騰空發出掛到墻上的故事是有力學依據的,是確實可信的。
七、小結
本研究表明,運用力學的方法、數學的方法研究太極拳能夠有效揭示太極拳的奧妙,采用人體剛體模型依據力學原理對太極拳作隔離體分析是運用現代科技理論研究太極拳的有效途徑。太極拳的技術動作、技術原理、訓練要求等都蘊含著深厚的力學原理,有許多方面可以運用數學公式進行定量分析、精確分析,使其更顯科學水平。
本研究采用平面剛體模型、從水平作用力入手分析是一個率先,也僅是一個開頭,還受到某些局限,還需要進一步開拓思路、創新方法,從更廣泛的力學角度進行深入研究。三維人體運動模型是近代的研究熱點[8],也是本文深入研究的需要。采用三維人體剛體模型模擬太極拳各種發力,通過隔離體分析更加深入解釋太極拳力學原理,更加全面揭示太極拳奧妙將是下一步的研究方向。
[1]武禹襄. 太極拳論[M]. 手抄本.
[2]楊澄甫. 太極拳說十要[M]. 手抄本.
[3]馬承九. 太極拳的科學觀[M]. 臺北:東大圖書公司,1994.
[4]肖飛. 太極拳的力學原理[M]. 北京:人民體育出版社,2009.
[5]GU Jie. Explosive and Sequential Strength in Tai Chi[J]. T’ai Chi, 2013, 37(3).
[6]顧杰,郭振興. 太極拳發勁的動量傳遞解析[J]. 邯鄲學院學報,2013(4).
[7]王宗岳. 十三勢行功心解[M]. 手抄本.
[8]李振波,李華. 基于運動生物力學的三維人體運動模型[J]. 系統仿真學報,2006,18(10).
(責任編輯:蘇紅霞 校對:李俊丹)
Analyze Taijiquan by Rigid Human Plane Model under Horizontal Force
GU Jie,GUO Zhen-xing,LV Meng
(Taiji cultural school, Handan College, Handan 056005, China)
For the first time this article proposes a human rigid body model to do a mechanical analysis for Taijiquan. The model comprises the common mechanical conditions, including the frame, mass, speed, attacking force, gravity,normal horizontal force, friction forces, etc. The model is analyzed by dynamic laws for taijiquan, which results in a few important conclusions. The gravity center should be inside the supporting area to maintain the balance. Skidding and root loss are two critical points. The body is in balance within the critical points. Beyond one of the critical point,the body will eventually loose balance. The horizontal attacking force comes from the friction force, the body overall momentum, and the momentum of the relative motion between limbs. Interior strength has two aspects: creating momentum and transfer force. The interior strength creates body momentum and transfer force. The balancing critical points are calculated for taiji solo and push hand. Numerical examples demonstrate the classical techniques of “throw like an arrow”, “bring in to empty”, “four ounces deflect thousand pound”
Taijiquan; mechanical analysis; rigid Human plane model
G852.11
A
1673-2030(2015)02-0082-26
2015-02-15
顧杰(1955—),男,江蘇蘇州人,邯鄲學院太極文化學院客座教授,美國通用汽車公司高級工程師,美國奧克蘭大學機械制造博士;郭振興(1950—),男,河北邯鄲人,邯鄲學院太極文化學院原院長,高級政工師,華中科技大學鑄造機械專業。
猜你喜歡
少林與太極(2023年5期)2023-07-14 03:01:50
少林與太極(2023年5期)2023-07-14 03:01:48
少林與太極(2023年3期)2023-07-14 02:49:56
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
基層中醫藥(2021年9期)2021-06-05 07:14:24
武術研究(2020年2期)2020-04-21 10:33:26
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年12期)2019-05-21 02:55:32
學苑創造·A版(2015年11期)2016-01-14 09:03:27
少林與太極(2014年3期)2014-04-08 11:58:43