動態氣流溫度測試技術
2015-11-01 09:18:55黃楊
中國科技信息 2015年9期
關鍵詞:測量
黃 楊
動態氣流溫度測試技術
黃 楊
分析熱電偶測量動態氣流溫度的原理和誤差因素,通過計算和試驗的方法,得到動態氣流溫度誤差修正公式及時間常數,最后,給出一種測量動態氣流溫度的理論方法。本文主要解決動態氣流溫度測量延遲問題,并結合誤差修正公式,提高測試精度。
氣流溫度是發動機工作過程的重要參數之一,在發動機試驗中經常需要測量氣流溫度。氣流溫度的變化范圍廣、溫度梯度大,一般采用熱電偶進行測量,然而,熱電偶測量動態氣流溫度時存在許多誤差因素,忽略速度誤差和傳熱誤差,氣流的動態特性是主要影響因素。本文從熱電偶測量動態氣流溫度的原理分析,通過試驗和計算的方法,得到動態氣流溫度誤差修正公式及時間常數,給出一種測量動態氣流溫度的新方法,解決動態氣流溫度測量延遲問題,提高測試精度。
動態氣流溫度測試方法
在飛行試驗中,動態氣流溫度一般采用熱電偶進行測量。
用熱電偶測量氣流溫度時,只要熱電偶兩個電極的材料確定,熱電偶的熱電勢就只與熱電偶兩端的溫度有關。如圖1所示,如果使參考溫度t0恒定不變,對給定材料的熱電偶,其熱電勢就只與工作端溫度t成單值函數關系,即EAB(t, t0)=f( t )。具體應用是用實驗方法得到參考溫度為0時的“熱電勢-溫度”對應關系數據表-即該熱電偶的分度表,有了這個分度表,在用熱電偶測溫度時,只要測得該熱電偶的熱電勢EAB(t,0),就可查分度表確定出對應的被測溫度的數值t 。
因此,我們在實際測量中如圖1,先測出熱電偶兩端電勢EAB(t, t0)和冷端溫度t0,然后根據分度表查出與冷端溫度t0對應的熱電勢EAB(t0,0)值,再根據式(1)得出熱電勢EAB(t,0),最后得到被測溫度t 。

動態響應誤差
熱電偶測量動態氣流溫度時存在許多誤差因素,忽略速度誤差和傳熱誤差,氣流的動態特性是主要影響因素。因此,要準確測量動態氣流溫度,就必須找出動態響應誤差并給以修正。

圖1 熱電偶實際測量電路
動態響應誤差
由于測溫元件有一定的質量,因此,測量的溫度值總有一定滯后,在量值上將略低于被測氣流溫度,產生測量誤差,這個誤差就是動態響應誤差。
當測熱點處于熱平衡時,輸入測熱點的加熱率等于測熱點內部的儲熱率。
由式(3)得出,動態響應誤差?Tτ為:

式(4)中的τ稱為熱電偶的時間常數,很明顯,誤差大小與熱電偶的時間常數有關,如果熱電偶的時間常數τ已知,根據熱電偶測得的溫度隨時間的變化曲線,曲線上任意一點的斜率和的乘積,即為該點的動態響應τ誤差,用它來修正相應的熱電偶示值Tj,即可得到氣流的有效溫度Tg。
時間常數
如前所述,由式(3)得出:
由此定義時間常數:滯后溫差與測熱點溫升梯度之比。
若被測介質溫度從t=0時刻的溫度Tg0變化到Tg時,熱電偶結點(測熱點)的溫度從Tj0變化,在時刻t,熱電偶的溫度為Tj。為了求取時間t 的值,也就是時間常數τ的值,將式(3)積分并整理得:
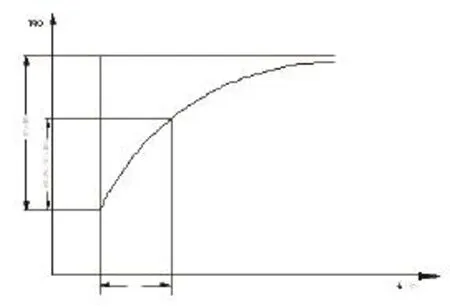
圖2 熱電偶的響應曲線
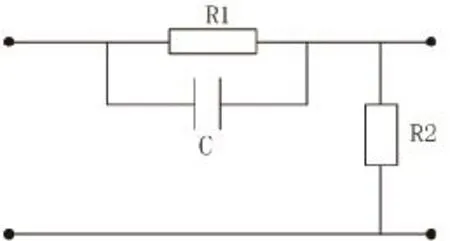
圖3 RC網絡

若開始時,Tj0=Tg0=T0,當t 變化到某時刻t=τ時,將有:
這個時間稱為熱電偶的時間常數τ,該時間就是熱電偶的溫度達到被測介質溫度63.2%所需要的時間。
時間常數τ一般用實驗方法測定。給熱電偶一個階躍的溫度變化,記錄熱電偶的響應曲線,取其幅值的63.2%處對應的時間為熱電偶的時間常數。
下圖為實驗室測得的某一熱電偶的響應曲線:我們可以在熱電偶的響應曲線(圖2)上找出(Tj-Tj0)等于階躍溫升(Tg-Tg0)的63.2%所對應的時間t,這個時間就等于熱電偶的時間常數τ。
修正電路
由于熱電偶的熱慣性,在測量動態氣流溫度時將產生動態響應誤差,測量值始終滯后并小于被測氣流溫度。從上面的分析可以看出,如果我們知道了熱電偶的時間常數,就可以用外電路補償的方法來實現動態誤差修正。
熱電偶的等效電路
一般的熱電偶,可以用一階線性微分方程描述:

上述過程可以用RC 充電電路等效模擬(圖9),因此有:
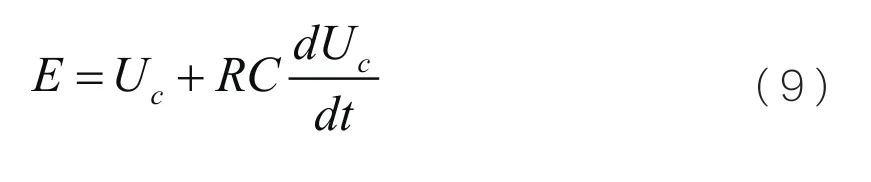
其中RC=τ為充電時間常數。
我們可以引入近似為熱電偶傳遞函數倒數的網絡來實現熱電偶動態誤差實時修正。
動態實時修正電路
修正電路簡單的有RL 網絡和RC 網絡,以RC網絡為例。如圖3所示,傳遞函數為:
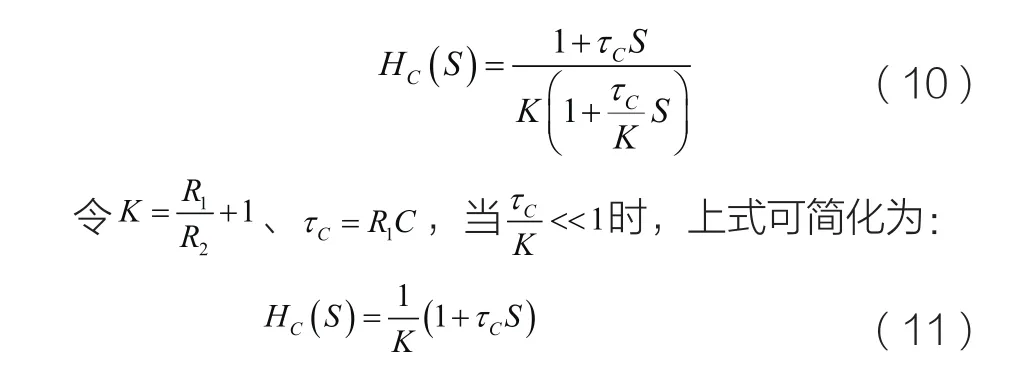
若校正網絡的時間常數等于熱電偶的時間常數,即τ=τC,那么在理論上,測試系統的傳遞函數應為:

C試系統的傳遞函數為:

結語
從上面的分析可以看出,我們在采用熱電偶進行動態氣流溫度測量時,為了提高測量精度,可以采用兩種方式降低動態響應誤差:
(1)減小傳感器時間常數
(2)外電路補償
如果我們知道了熱電偶的時間常數,就可以用外電路補償的方法來實現動態誤差修正,修正網絡的時間常數等于熱電偶的時間常數。
10.3969/j.issn.1001-8972.2015.09.004
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00