多軸車輛第三軸電控液壓轉向系統及其PID控制
2015-10-29 05:09:53錢立軍胡偉龍邱利宏劉少君
中國機械工程 2015年22期
關鍵詞:系統
錢立軍 胡偉龍 邱利宏 劉少君
合肥工業大學,合肥,230009
多軸車輛第三軸電控液壓轉向系統及其PID控制
錢立軍胡偉龍邱利宏劉少君
合肥工業大學,合肥,230009
為了改善多軸車輛后軸輪胎的磨損,設計了一種第三軸電控液壓轉向系統。重點研究了該系統的液壓執行機構和對中自鎖油缸的工作原理,擬合出了符合阿克曼轉角定理的第三軸預期轉角,建立了電控液壓轉向系統的模型,設計了分數階PID控制器并提出了該分數階PID控制器參數的選取方法,最后進行了仿真分析、臺架試驗、實車試驗。擬合結果表明,第三軸預期轉角在車速為10 m/s和20 m/s時,期望值和實際值的殘差平方都在0.16以內,擬合度都在0.985以上。仿真分析結果表明,分數階PID控制系統比整數PID控制系統具有更小的超調量和更短的調節時間。臺架試驗結果表明,第三軸預期轉角在車速為10 m/s和20 m/s時,期望值和實際值的誤差都在±0.3°以內。由實車試驗可以定性看出,安裝該第三軸電控液壓轉向系統比不安裝該系統在空載和滿載時輪胎磨損情況都有所改善。
多軸車輛;轉向系統;液壓執行機構;期望轉角;分數階PID控制器
0 引言
傳統多軸車輛第三軸轉向一般使用桿系結構等機械式助力轉向系統跟隨第一軸轉向,這一方法不滿足Ackerman幾何關系,導致后軸輪胎易磨損[1]。這就需要在第三軸使用電控液壓轉向系統控制第三軸的轉角。
國內外的研究多集中在理論研究階段。文獻[2-3]建立了多軸車輛轉向系統的ADAMS模型;文獻[4-5]基于零質心側偏角分析并得出了不同軸間的轉向關系;文獻[6-7]對電液系統建模后,提出了基于模糊自適應的PID控制策略,并利用MATLAB進行了仿真分析。
本文設計了一種電控液壓轉向系統,使得控制器可以根據第一軸的轉角控制車輛第三軸的轉動,并設計了對中自鎖的液壓油缸,使得載重汽車在長時間直線行駛的工況下第三軸不發生偏轉。本文還對第三軸預期轉角進行分段模擬,并建立了電控液壓轉向系統模型,設計了分數階PID控制器,提出一種該分數階PID控制器參數的選取方法并進行了仿真分析和試驗驗證。
1 電控液壓轉向系統設計
本文研究的電控液壓轉向系統應用于某型號的8×2載重車輛的第三軸轉向控制。車輛第一和第二軸轉向通過機械液壓助力轉向系統實現,第四軸是不轉向的驅動軸。電控液壓轉向系統由電液比例閥、輔助裝置、控制器、角度傳感器和速度傳感器組成。角度傳感器安裝在第一軸和第三軸的轉向主銷頂端,液壓油缸安裝在第三轉向軸的轉向橫拉桿上。通過角度傳感器測得第一軸和第三軸的當前轉角,通過控制器得出第三軸期望轉角,控制電液比例閥推動對中自鎖液壓油缸,使第三軸轉動。
1.1液壓執行機構設計
液壓執行機構的原理如圖1所示。控制器控制各閥流量和開關。轉向系統中,對中自鎖油缸的左端和車橋固連,右端通過A1面的連桿和第三轉向軸的轉向橫拉桿固連。整個缸筒浮動安裝。當對中自鎖油缸左邊的活塞移動到液壓左缸的右端面(A2面)且右邊的活塞移動到液壓右缸的右端面(A1面)時,第三軸輪胎直線行駛。
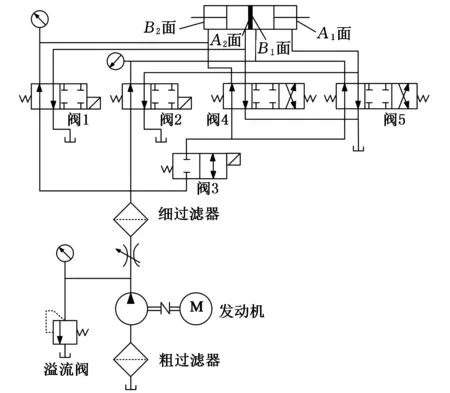
圖1 液壓執行機構原理圖
正常狀態下,閥3打開,閥1、閥2關閉,控制器根據比例換向閥4 和比例換向閥5控制對中自鎖油缸的運動,實現第三軸轉向功能。系統檢測到故障時,將閥1、閥2打開,將閥3關閉,閥4、閥5回到中位。閥1使對中自鎖油缸的左缸移動到A2面,閥2使對中自鎖油缸的右缸移動到A1面。這時,第三軸轉角不隨第一軸轉角變化而發生變化。
1.2對中自鎖油缸
載重汽車直線行駛的工況比較多,這種工況下第三軸車輪一般處于不偏轉狀態,即對中自鎖油缸對中工況運作時間較長。轉向系統中采用的對中油缸通常通過高壓油液實現對中鎖死,缺點是鎖死不牢靠,受地面沖擊時穩定性差。
為了克服該缺點,設計了一種能夠在中位實現可靠機械自鎖的對中自鎖液壓油缸,其結構見圖2。自鎖卡板與拉伸彈簧相連,通過控制拉伸彈簧就可以控制液壓油缸處于自鎖或解鎖狀態。在油缸自鎖過程中,油液驅動活塞運動,活塞端的環形凸起將自鎖卡板推出,使得自鎖卡板嵌入到環槽內實現機械自鎖。在油缸解鎖過程中,油液反方向流入,油液推動活塞向解鎖一側運動,在拉伸彈簧拉力的作用下,自鎖卡板回位到安裝基體之中,從而實現解鎖。正常情況下自鎖卡板嵌入安裝基體內,不伸出來,因而液壓油缸不會被鎖住。彈簧卡板總成的結構見圖3。
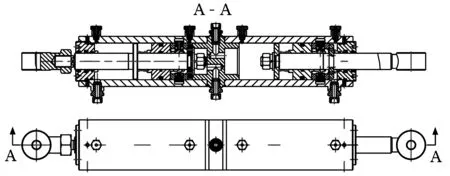
圖2 對中自鎖油缸的裝配圖
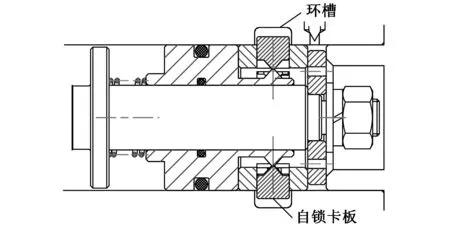
圖3 彈簧卡板總成的結構圖
2 第三軸預期轉角
在不考慮轉向系統剛度且車輪保持純滾動的情況下,根據阿克曼原理,同一軸上的外轉向輪轉角與內轉向輪轉角之間的關系如下:
(1)
式中,αi為第i軸外轉向輪的轉角;βi為第i軸內轉向輪的轉角;B為輪距;li為第i軸車輪中心到瞬時轉動中心的距離。
根據阿克曼原理,不同軸外轉向輪轉角之間還應滿足關系:
(2)
式中,Li為第i軸車輪中心到車輛質心的距離;Δ為車輪瞬時轉動中心到質心的距離。
根據文獻[8]中零質心側偏角控制策略,有
(3)
式中,m為車輛質量;v為車輛行駛速度;Ci為第i軸綜合側偏剛度。
車輛的部分參數如表1所示。
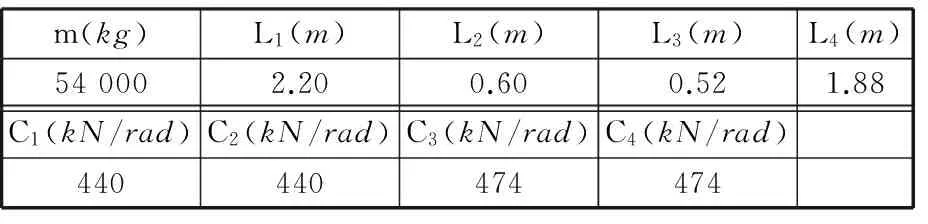
表1 車輛部分參數
根據阿克曼轉角公式,在不同速度下,對應每一個第一軸車輪的轉角,可求出相應的第三軸車輪目標轉角,并且進行分段直線擬合,結果如下:當車速為10m/s時,設第三軸預期轉角為y,第一軸轉角為x,有

(4)
當車速為20m/s時,設第三軸預期轉角為y,第一軸預期轉角為x,有
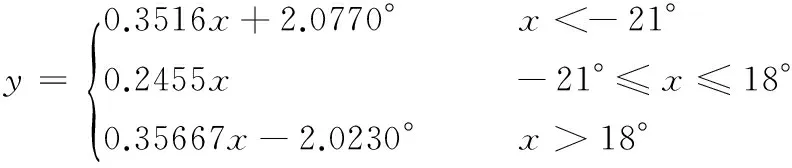
(5)
第一轉向軸的轉動范圍為[-45°,45°],在該范圍,車輛速度v分別為10m/s和20m/s時,測量相應的第一軸車輪實際角度和第三軸車輪實際角度,再計算出相應的第三軸車輪期望角度,結果如圖4所示。
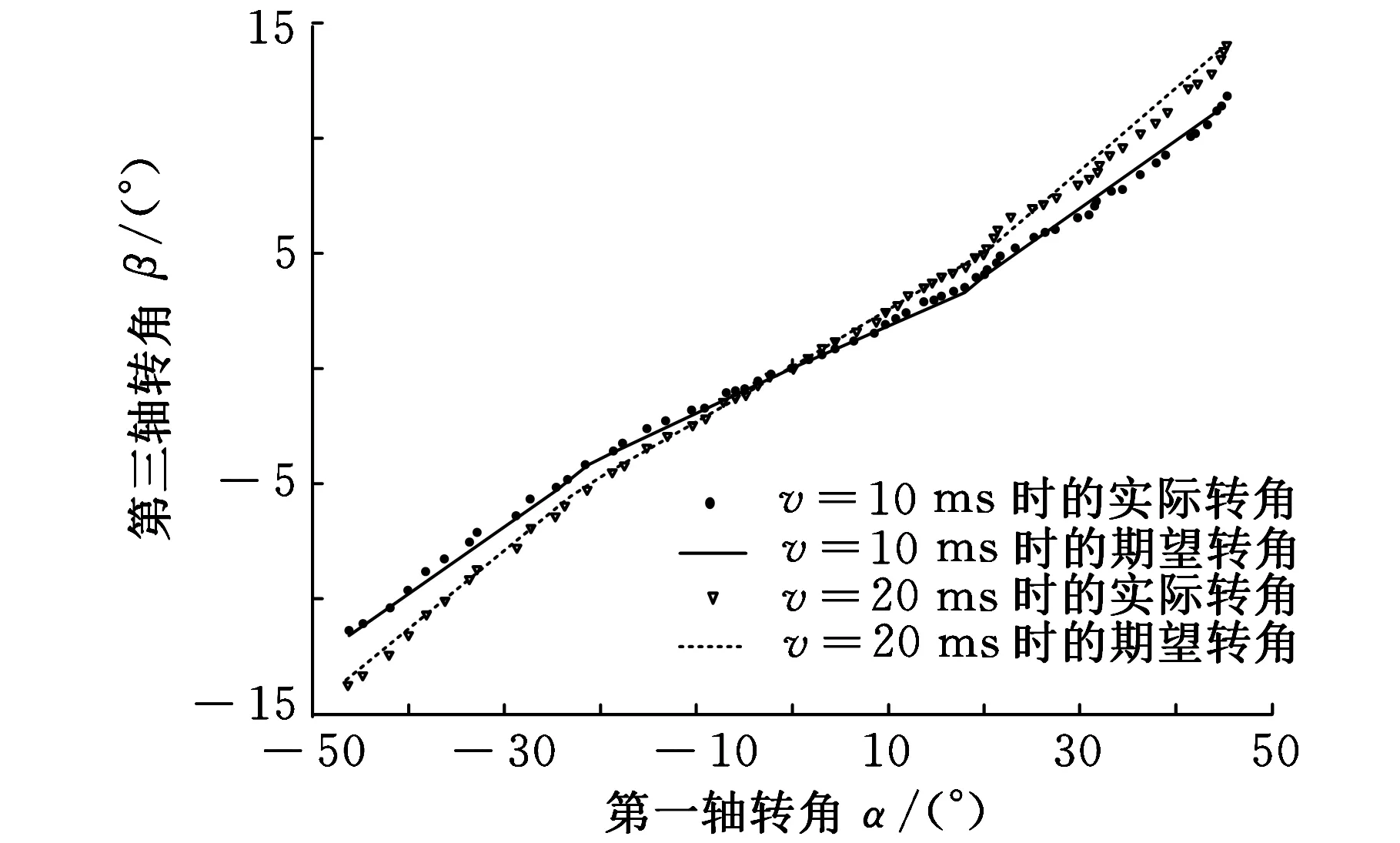
圖4 第三軸的實際轉角和期望轉角
計算期望值與實際值殘差平方和擬合度,結果如下:v=10m/s時,殘差平方為0.1536,擬合度為0.9886;v=20m/s時,殘差平方為0.1598,擬合度為0.9859。這說明擬合的三段直線比較符合實際情況。
3 電控液壓轉向系統模型
電控液壓轉向系統模型主要包括轉向系統的模型和電液比例閥的模型兩部分。電液比例閥采用帶位移反饋式的比例閥,根據其運動學特性可得出傳遞函數為[9]
(6)
式中,x(s)為閥芯位移;I(s)為比例閥電流;K1為比例放大器增益;K2為比例閥放大系數;ωn為控制閥的固有頻率;ξn為液壓相對阻尼系數。
閥芯位移x(s)就是第三軸橫向拉桿的位移xv(s)。根據轉向系統模型,第三軸橫向拉桿的位移xv(s)與第三軸轉角θ(s)之間的傳遞函數為
(7)
式中,A為活塞面積;ρ為系統系數;ωh為液壓無阻力固有頻率;ξh為液壓阻尼比。
由式(6)和式(7)可以得到第三軸轉角θ(s)與比例閥電流I(s)之間的傳遞函數:
(8)
一般情況下ωn遠大于ωh,因此第三軸轉角θ(s)與比例閥電流I(s)之間的傳遞函數Gc(s)可做如下近似:
(9)
代入車輛相關參數可以得到
(10)
4 第三軸電液助力轉向系統分數階PID控制器及其參數的求解
分數階微積分的介紹和分數階微積分的求解方法在文獻[10-14]有詳細論述,這里分數階微積分的定義采用Caputo定義,求解分數階微積分,借助于MATLAB,根據分數階定義,使用截斷MacLaurin表達式展開,S表達式選用Simpson公式法,編制分數階微積分求解模塊,在MATLAB中構造一種求解分數階MacLaurin展開式的函數fractionC,并在Simulink中構造分數階模塊。
4.1分數階PID的求解方法
相對于整數PID控制器,分數階PID控制器包含積分階數λ和微分階數μ,控制更加精確、靈活。分數階PID控制器的微分方程形式如下:
(11)

Gf oc(s)=kP+kIs-λ+kDsμ
(12)
對于閉環系統,存在特征方程:
1+Gc(s)Gf oc(s)=0
(13)
尋找一個系統的幅值裕量Am和相位裕量φm,滿足下式
(14)
其中,ωp、ωg滿足下式
(15)
4.2使用MATLAB求解分數階PID的參數
目標幅值裕量Am取1.5,目標相位裕量取π/2,將式(10)代入式(13)~式(15)中有
(16)
式(16)中有kP、kI、kD、λ、μ、ωp、ωg7個參數、4個等式,我們將λ、μ均從0.1開始按0.1遞增取值,一直到5.0。優化目標為時間乘以誤差絕對值積分(ITAE)JITAE:
(17)
當JITAE最小時,認為系統性能達到最優。
在MATLAB中使用fmincon函數求解PID參數,fmincon函數的數學模型為
(18)
令kP、kI、kD、λ、μ、ωp、ωg分別對應x1、x2、x3、x4、x5、x6、x7,令初始條件為-10、-10、-10、 0.1、0.1、0、0,不等式約束中下限lb分別為-10、-10、 -10、0.1、0.1、0、0,上限ub分別為10、10、10、5、5、90、90,等式約束ceq(x)為式(16)中的4個等式,在MATLAB中求出最優的kP、kI、kD、λ、μ分別為18、0.15、10.5、1.8、1.5,得到JITAE=2.47,分數階PID控制器為
Gfrc-pid=18+0.15s-1.8+10.5s1.5
(19)
5 試驗驗證
5.1仿真分析
確定λ和μ的取范圍值后,ITAE性能指標曲線如圖5所示,發現當μ從0增大到1.5時,ITAE下降,當μ從1.5開始增大時ITAE上升,故μ為1.5時ITAE最優。
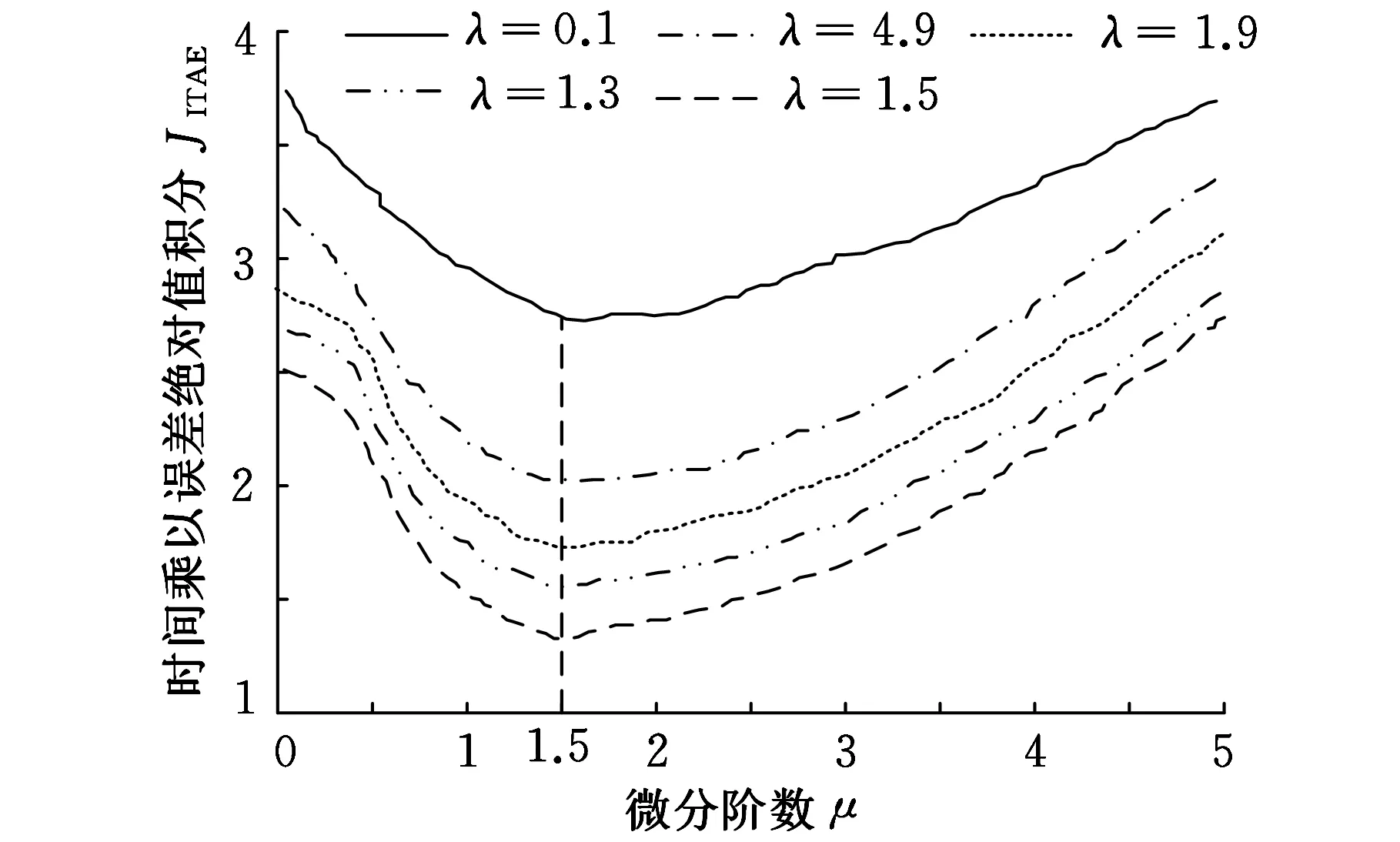
圖5 μ對階躍響應下的ITAE影響
當取μ=1.5,輸入為單位階躍信號,λ由0到5遞增變化時,ITAE性能指標如圖6所示,可見λ=1.8時ITAE性能指標值達到最小。綜上所述,由仿真結果可知,本文所提算法中當λ=1.5,μ=1.8時控制效果最理想,與fmincon函數求解的分數階PID參數結果一致。
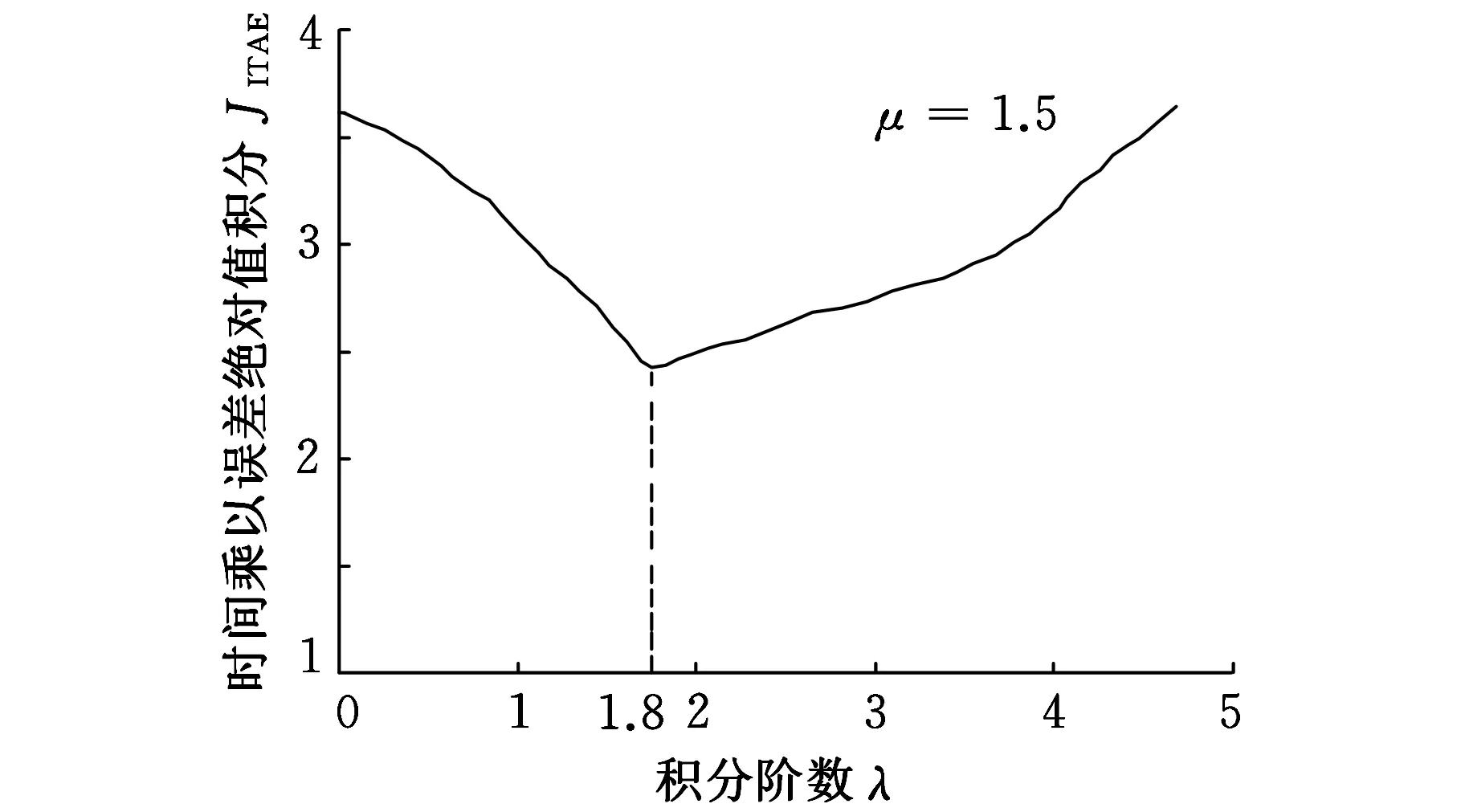
圖6 λ對階躍響應下的ITAE影響
如果采用整數階PID,則解得整數階PID控制器為
Gint-pid=4.0+0.0015s-1+3s
(20)
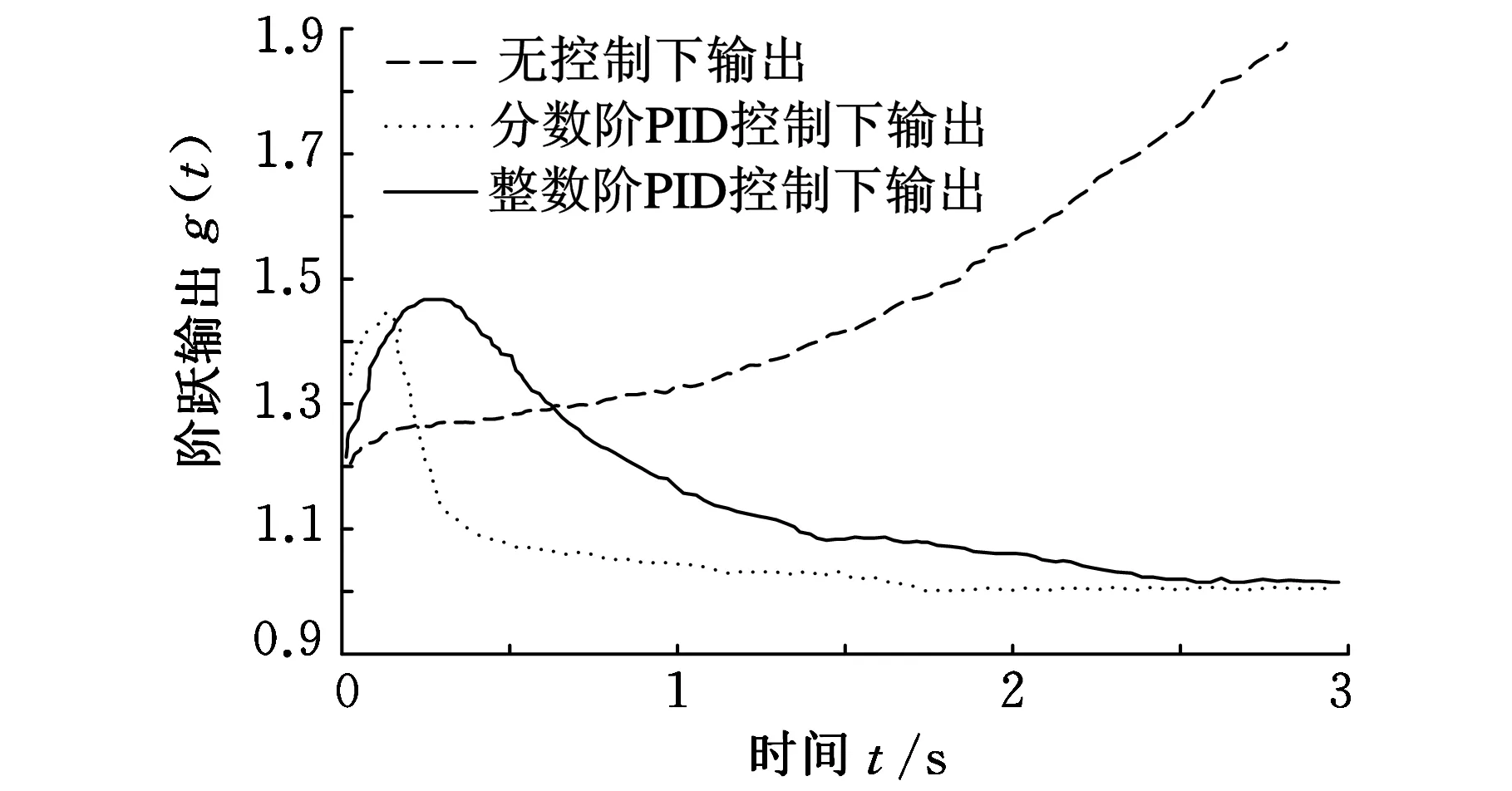
圖7 分數階PID控制、整數階PID控制和無控制下系統階躍輸出
比較使用分數階PID控制器、整數階PID控制器和不使用控制器三種情況下系統的單位階躍響應,結果如圖7所示。從圖7可以看出,分數階PID比整數階PID具有更小的超調量和調節時間。
5.2臺架試驗
在實車試驗前,設計試驗臺架以驗證系統的可靠性。試驗臺架中第一軸和第三軸用兩個安裝了轉角傳感器的轉向主銷代替。第一軸轉向用手柄模擬。轉角通過兩個主銷的轉動量指針和刻度盤來讀取。
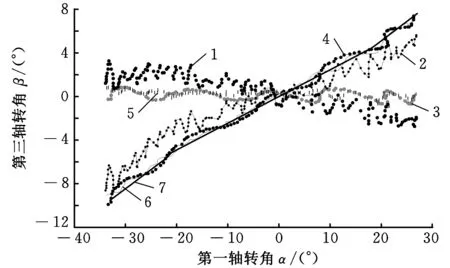
(b)v=20 m/s圖8 分數階PID控制、整數階PID控制和無電控液壓轉向系統下第三軸轉角及其期望轉角的誤差
第一軸外輪最大轉角27°,內輪的最大轉角33°,第三軸轉角隨第一軸轉角的變化關系如圖8所示,其中,曲線1表示無電控液壓轉向系統時第三軸轉角與期望轉角的差,曲線2表示無電控液壓轉向系統時第三軸轉角,曲線3表示整數階PID控制下的第三軸轉角與期望轉角的差,曲線4表示整數階PID控制下的第三軸轉角,曲線5表示分數階PID控制下的第三軸轉角與期望轉角的差,曲線6表示分數階PID控制下的第三軸轉角,曲線7表示第三軸期望轉角。可以看出,在v=10m/s和v=20m/s時,使用分數階PID控制器后第三軸的實際轉角和第三軸預期轉角的誤差值都在允許的誤差值(±0.3°)內,且使用分數階PID控制的第三軸轉向效果比使用整數階PID和不使用第三軸電控液壓轉向系統的效果都要好。
5.3實車試驗
為了驗證該電控液壓轉向系統在車輛實際運行過程中的轉向效果,進行了實車試驗。比較未安裝電控液壓轉向系統空載轉向后輪胎的磨損情況(圖9a)和安裝分數階控制器的電控液壓轉向系統空載轉向后輪胎的磨損情況(圖9b)后,可以非常明顯的看出,圖9a中輪胎磨損嚴重,圖9b中輪胎磨損較小。安裝分數階控制器的電控液壓轉向系統后,車輛空載轉向工況下輪胎的磨損情況得到很大的改善。圖9c中,車輛加載鐵塊,第三軸承重最大,單軸承載7.5t。試驗過程中車輛在正常行駛時運行良好且沒有出現輪胎磨損現象,如圖9d所示。說明安裝分數階控制器的電控液壓轉向系統后,車輛滿載轉向工況下輪胎的磨損情況也得到很大的改善。

(a)未安裝電控液壓轉向系統空載轉向后輪胎的磨損情況(b)安裝分數階PID電控液壓轉向系統空載轉向后輪胎的磨損情況

(c)滿載試驗 (d)滿載試驗后輪胎磨損情況圖9 實車試驗
6 結論
(1)重點研究了電控液壓轉向系統的液壓執行機構,由于該機構中設有對中自鎖油缸,使得長時間直線行駛時第三軸不會發生自動偏轉。
(2)建立了電控液壓轉向系統模型及分數階PID控制器并解出了控制器參數。仿真結果驗證了PID控制器參數求取方法的正確性。
(3)進行了臺架試驗,結果表明安裝分數階PID控制的電控液壓轉向系統后,第三軸實際轉角比整數階或不安裝電控液壓轉向系統更接近期望轉角,且誤差很小。進行了實車試驗,發現在空載和滿載下安裝分數階PID控制的電控液壓轉向系統比不安裝的系統,輪胎磨損得到了改善。
[1]劉少君.多軸車輛第三軸電控液壓轉向系統研究[D].合肥:合肥工業大學,2013.
[2]ZhuYongqiang,ZhangPingxia.SteeringAnalysisofMulti-axleVehicleBasedonADAMS/VIEW[C]//2ndInternationalConferenceonAdvancedEngineeringMaterialsandTechnology(AEMT).Zhuhai,China,2012:2878 -2881.
[3]LiuYun.OptimumDesignofMulti-axleTrailer’sSteeringMechanismBasedonADAMS[C]//InternationalConferenceonGreenPower,MaterialsandManufacturingTechnologyandApplications(GPMMTA2011).Chongqing,2011:289-293.
[4]WangShufeng,ZhangJunyou.TheDesignandPerformanceAnalysisofMulti-axleDynamicSteeringSystem[C]//InternationalConferenceonAppliedMechanicsandMechanicalEngineering.Changsha, 2010:756-761.
[5]WangShufeng,LiHuashi.AnalysisofVehicleParametersEffectsonSteeringPerformanceofThree-AxleVehiclewithMulti-axleSteering[C]//2ndInternationalConferenceonModellingandSimulation.Tokyo,2009:240-244.
[6]王云超.多軸轉向車輛轉向性能研究[D].長春:吉林大學,2007.
[7]韓汪利.多軸車輛轉向控制系統設計及仿真[D].長沙:湖南大學,2011.
[8]田陽陽.多軸車輛電液比例轉向控制系統研究[D].長春:吉林大學,2008.
[9]江桂云,王勇勤,嚴興春. 液壓伺服閥控缸動態特性數學建模及仿真分析[J]. 四川大學學報(工程科學版),2008,40(5):195-198.
JiangGuiyan,WangYongqing,YanXingchun.MathematicsModelingandSimulationAnalysisofDynamicCharacteristicsforHydraulicCylinderbyServo-valve[J].JournalofSichuanUniversity(EngineeringScienceEdition),2008,40(5):195-198.
[10]王淼.分數階控制器設計與仿真研究[D].北京:北京交通大學,2014.
[11]KiryakovaV.FromtheHyper-BesselOperatorsofDimovskitotheGeneralizedFractionalCalculus[J].FractionalCalculusandAppliedAnalysis, 2014(12): 977-1000.
[12]SrivastavaHM,GabouryS,BayadA.ExpansionFormulasforanExtendedHurwitz-LerchZetaFunctionObtainedviaFractionalCalculus[J].AdvancesinDifferenceEquations,2014(6):169.
[13]ValerioD,MachadoJT,KiryakovaV.SomePioneersoftheApplicationsofFractionalCalculus[J].FractionalCalculusandAppliedAnalysis, 2014(6): 552-578.
[14]MachadoJT,KiryakovaV,MainardiF.RecentHistoryofFractionalCalculus[J].CommunicationsinNonlinearScienceandNumericalSimulation, 2011,16(3):1140-1153.
[15]趙春娜.分數階系統分析與設計[M].北京:國防工業出版社,2011.
[16]鄧立為,宋申民,龐慧. 控制系統的分數階建模及分數階PIλDμ控制器設計[J]. 電機與控制學報, 2014,18(3):85-92.
DengLiwei,SongShenmin,PangHui.FractionalOrderModelforControlSystemandDesignOffractionalOrderPIλDμController[J].ElectricMachinesandControl, 2014,18(3):95-92.
[17]ZhaoChunna,XueDingyu,ChenYangquan.AFractionalOrderPIDTuningAlgorithmforaClassofFractionalOrderPlants[C]//IEEEICMA.NiagaraFalls,2005:216-221.
(編輯王旻玥)
Electronic Hydraulic Steering System and Its PID Controller Applied to Third Axle of Multi-axle Vehicles
Qian LijunHu WeilongQiu LihongLiu Shaojun
Hefei University of Technology,Hefei,230009
The electronic hydraulic steering system of a third axis aimed at reducing the wear of the rear tires of the multi-axis vehicles. The actuator of electric hydraulic steering system and the working principles of the centering and self-locking cylinder of hydraulic system were focused.An expected angle of the third axle was fitted based on the Ackerman angle theorem. A model of electronic hydraulic steering system was built. A fractional order PID controller and the algorithm of fractional order PID controller parameters were put forward.At last the simulation analyses, a bench test and a vehicle test were conducted. The fitting results show that the residual square between the expected values and the real values of the angles of the third axle are within 0.16 and the fitting degree is above 0.985 when the speed of vehicle is as 10 m/s or 20 m/s. And the simulation results show that the system controlled by fractional order PID controller has smaller overtime and shorter adjusting time than the one of integral order PID controller. The bench test results show the errors between the expect values and the real values of the third axle are within (±0.3°) when the speed of vehicle is as 10 m/s or 20 m/s. Vehicle experimental results show that tire wear are reduced no matter in the case of no-loaded or full-loaded after the fractional order PID control electric hydraulic steering system is installed.
multi-axle vehicle;steering system; hydraulic actuator;expected angle;fractional order PID controller
2015-01-12
工業信息化部電子信息產業發展基金資助項目(財[2009]453號);中航工業產學研合作創新工程專項資助項目(CXY2010HFGD26)
U463.4DOI:10.3969/j.issn.1004-132X.2015.22.005
錢立軍,男,1962年生。合肥工業大學機械與汽車工程學院教授、博士研究生導師。主要研究方向為汽車現代設計理論與方法、電動汽車技術、汽車電子控制。胡偉龍,男,1988年生。合肥工業大學機械與汽車工程學院博士研究生。邱利宏,男,1989年生。合肥工業大學機械與汽車工程學院博士研究生。劉少君,男,1989年生。合肥工業大學機械與汽車工程學院碩士研究生。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32