基于超聲復合場的空間懸浮微粒任意點輸運方法
2015-10-29 05:33:01吳立群杜錫標張俐楠
中國機械工程 2015年22期
關鍵詞:方向
莊 龍 吳立群 杜錫標 張俐楠
杭州電子科技大學,杭州,310018
基于超聲復合場的空間懸浮微粒任意點輸運方法
莊龍吳立群杜錫標張俐楠
杭州電子科技大學,杭州,310018
提出了基于超聲復合場驅動微粒懸浮輸運方法。首先從超聲相控陣列的延時聚焦原理出發,建立了空間任意點聚焦模型和作用力公式,然后利用超聲駐波場輻射力計算方法,建立了微粒在超聲復合場下的運動控制模型和驅動力公式。通過MATLAB模擬復合聲場,分析了影響聚焦性能和控制性能的因素,給出了初步實驗驗證結果。最后提出了任意控制微粒運動的超聲復合場驅動方案。
內加工;超聲懸浮;復合場;微粒輸運
0 引言
隨著激光內加工技術的興起,超聲內加工技術應運而生。內加工技術要求將加工能量和加工工具(以下簡稱微粒)直接送到加工對象內部去,直接加工制造內部結構[1]。本課題組曾提出了一種非透明材料內部結構直接加工方法,即基于超聲懸浮的內部直接加工技術。該方法與激光內加工技術相比具有加工成本低、可面向非透明材料和利用多種能量效應等優點,但與激光內加工技術相比,超聲駐波懸浮加工只能將加工能量或加工微粒設置在駐波節點半波長以內的空間范圍內移動,且受構件形狀條件制約,不能全空間內任意運動;同時,在超聲波傳遞過程中,能量損失較大且存在較大的阻抗不匹配引起的加工噪聲和運動不穩定性。超聲內加工技術要求超聲懸浮微粒在空間內任意點運動,類似激光聚焦一樣可任意操縱、動態控制。本課題旨在研究超聲駐波與超聲陣列聚焦復合場驅動微粒懸浮輸運數學模型和任意點運動控制方案。
1 超聲相控原理及聚焦聲場研究
參考激光內加工技術,引入超聲陣列聚焦方法,基于超聲駐波技術,驅動微粒任意點運動。
1.1超聲相控陣列的聚焦原理
圖1所示為超聲相控陣列聚焦模型。對于有n個陣元的陣列來說,如果所有的陣元都同時發射超聲波,設第i個陣元在Q點的聲壓為pi,可得點Q的總聲壓:
由于每個陣元到聚焦點的距離不同,所以可以根據各個陣元與聚焦點的距離,給每個陣元的信號加上一定的延時量,并且控制各個延時量的大小從而使所有的信號能同時到達聚焦點形成聚焦,相當于凹球面換能器的原理。根據凹球面換能器的相關研究可知,焦區深度的大小為
(1)
2F/D>1
式中,λ為波長;F為焦距;D為換能器寬度。
在焦距相同的情況下,頻率越高,端面越寬。焦點直徑隨著陣元數量的增大而減小,即陣元數量越大,位移分辨率越高,加工精度越高。要改變聚焦點的位置,只需調整每個陣元的延遲時間。根據這一原理,相控陣列能夠實現動態聚焦。對于聲波,要實現聚焦就應該使相位差等于零,時差Δt、頻率f0與相位差Δφ的關系可表示為
Δφ=2πf0Δt
1.2相控陣的延時關系建立
相控聚焦通過相控延時的控制實現。延時關系可由幾何關系得到,如圖2所示。
由圖2可得

[F-(tn-t0)c]2
(2)
式中,N為陣元總數;n=0,1,…,N-1;d為相鄰陣元中心間距;F為陣元到任意點的距離;c為波速;tn為相控陣的延遲時間。
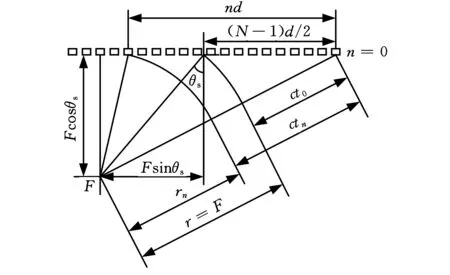
圖2 相控陣元延時與幾何結構關系示意圖
式(2)整理后可得
(3)
若n=0時tn=0,則可得
(4)
由式(3)、式(4)可推出
(5)
則第n個陣元與第n-1個陣元之間的延時差為
(6)
化簡得
(7)
1.3超聲相控聚焦聲壓計算模型
建立相控陣列聲壓幾何模型,如圖3所示。由上節可知單個陣元的聲壓分布[2]為
(8)
式中,k為波數;u為聲源振動速度;ρ0為空氣密度;L為陣元長度;a為陣元寬度。
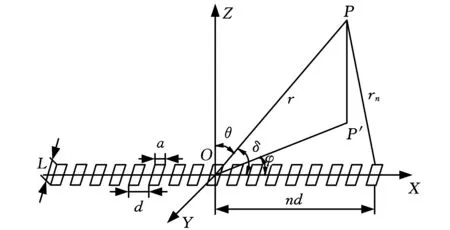
圖3 相控陣列聲壓幾何示意圖
用pn表示第n個陣元在P點的聲壓,相控陣的聲壓通過N個陣元聲壓相疊加得到總聲壓為
(9)
1.4超聲相控聚焦性能MATLAB模擬分析
為了研究上述參數分別對相控陣聚焦聲場的影響,確定如下參數:陣元初始大小3 mm×0.7 mm,陣元初始數量Ne=64,陣元初始間距gap=0.5 mm,初始發射頻率f=0.8 MHz,聚焦初始深度80 mm。分別設置仿真陣元數量Ne為32、64及96;仿真陣元間距gap為0.3 mm、0.5 mm及0.7 mm;仿真發射頻率f為0.6 MHz、0.8 MHz及1 MHz。圖4~圖6分別為Ne=96,gap=0.7 mm,f=1 MHz等參數下的聚焦聲場。
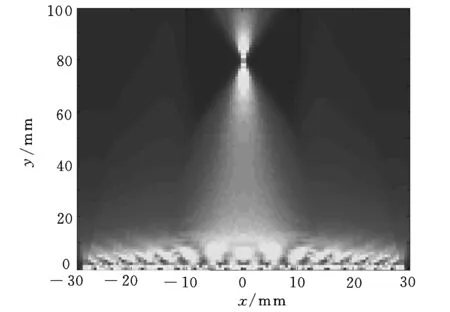
圖4 Ne=96的聚焦聲場
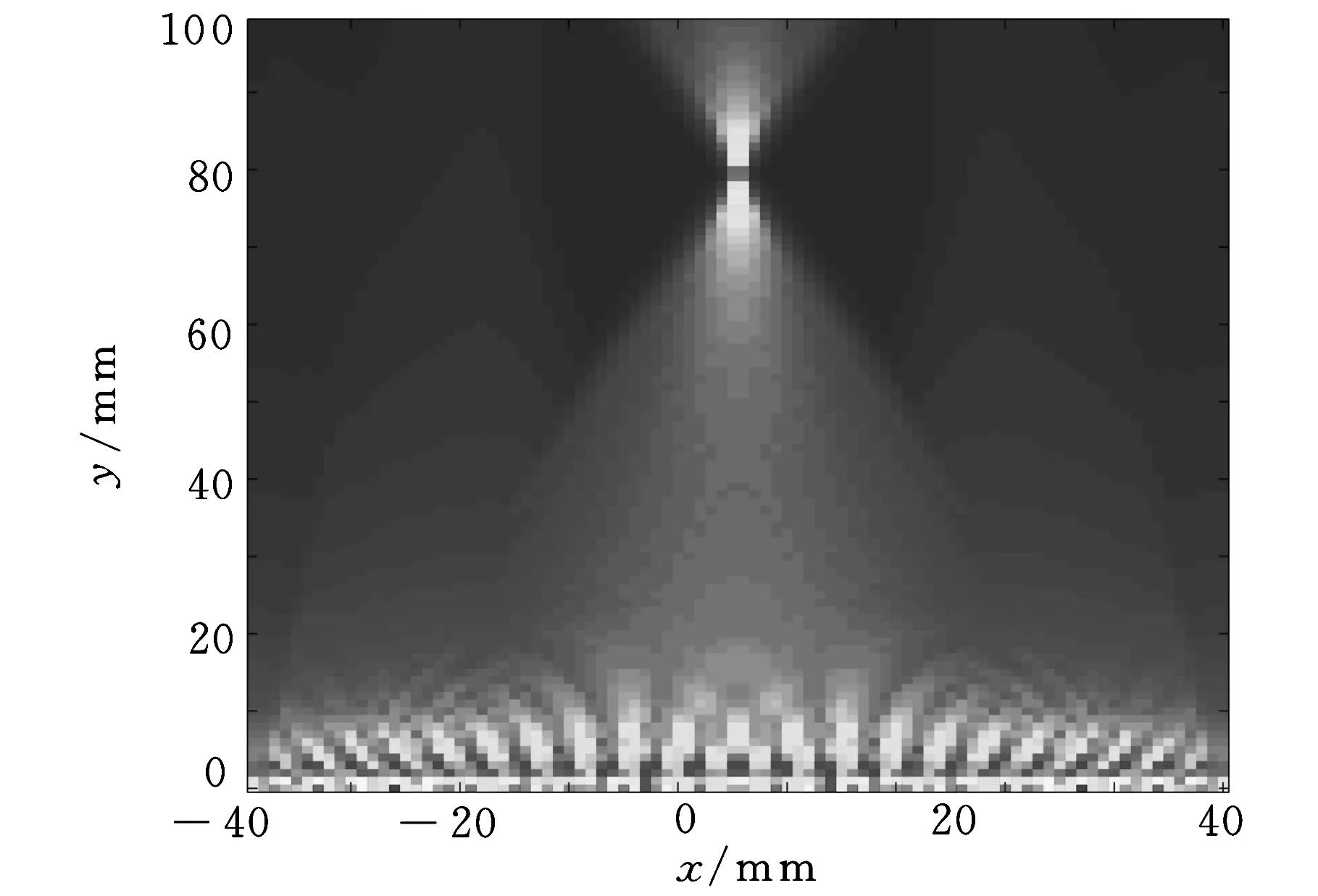
圖5 gap=0.7 mm的聚焦聲場

圖6 f=1 MHz的聚焦聲場
從以上仿真結果可以看出,增加陣元個數,加大陣元間距,提高發射頻率能夠有效地提高相控聚焦性能。
2 超聲復合場微粒驅動方法
2.1超聲聚焦輻射力計算
一般情況下,物體懸浮的位置到相控陣的距離遠大于陣元尺寸,可假設單個陣元為點聲源。根據球面波的性質,小球體在點聲源聲場中受到的輻射力,其方向沿點聲源與小球體徑向方向,如圖7所示。根據聲波的疊加理論[3],小球體所受到的力即為聲場中各輻射力的矢量和。
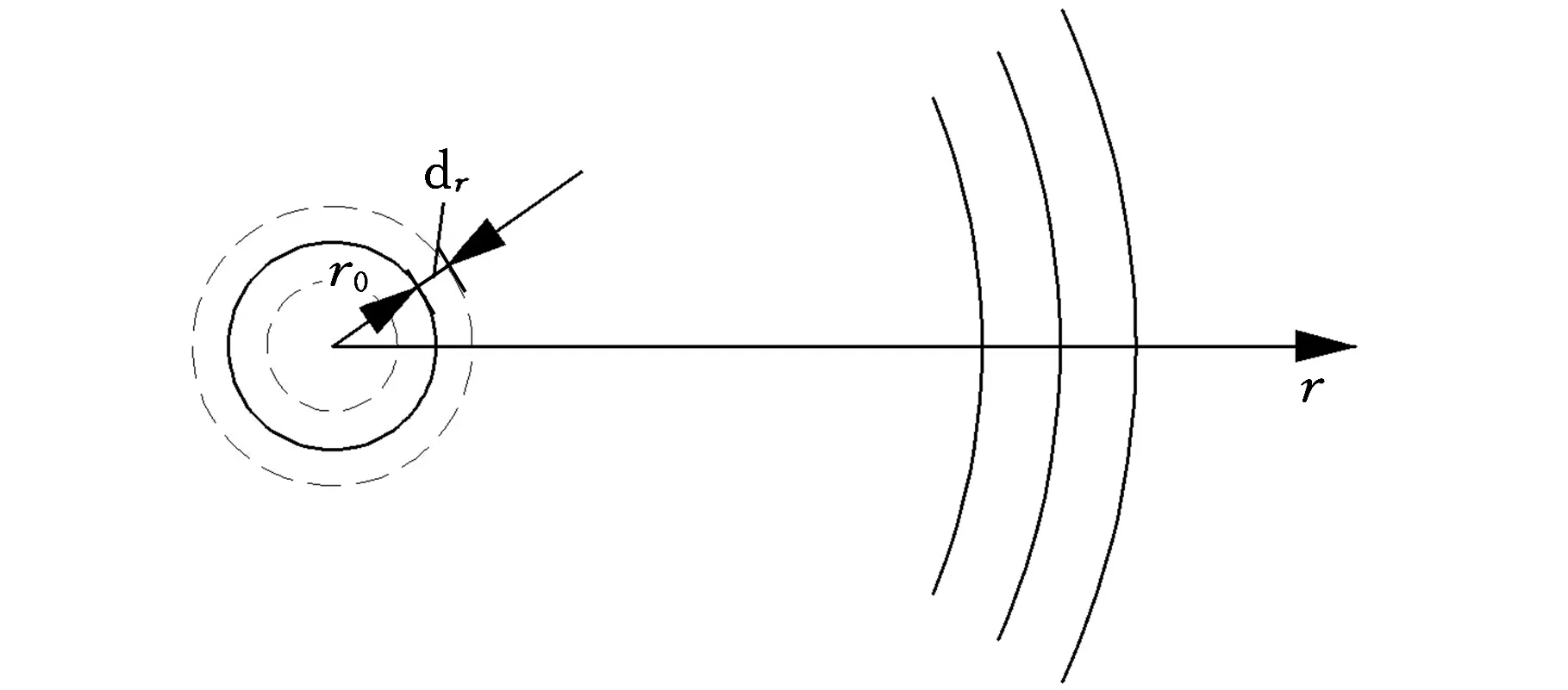
圖7 小球在點聲源聲場中的輻射力方向
2.1.1P點在Z軸上
首先建立小球體的受力關系,如圖8所示,主要研究OXZ面聲的輻射力情況。設陣元中心間距為d,陣元個數為n,小球體所在位置點為P,小球半徑為Rs,以陣列中心O為圓心建立平面坐標。根據P點位置,對P點在Z軸上和在OXZ面上任意點分別進行計算分析。
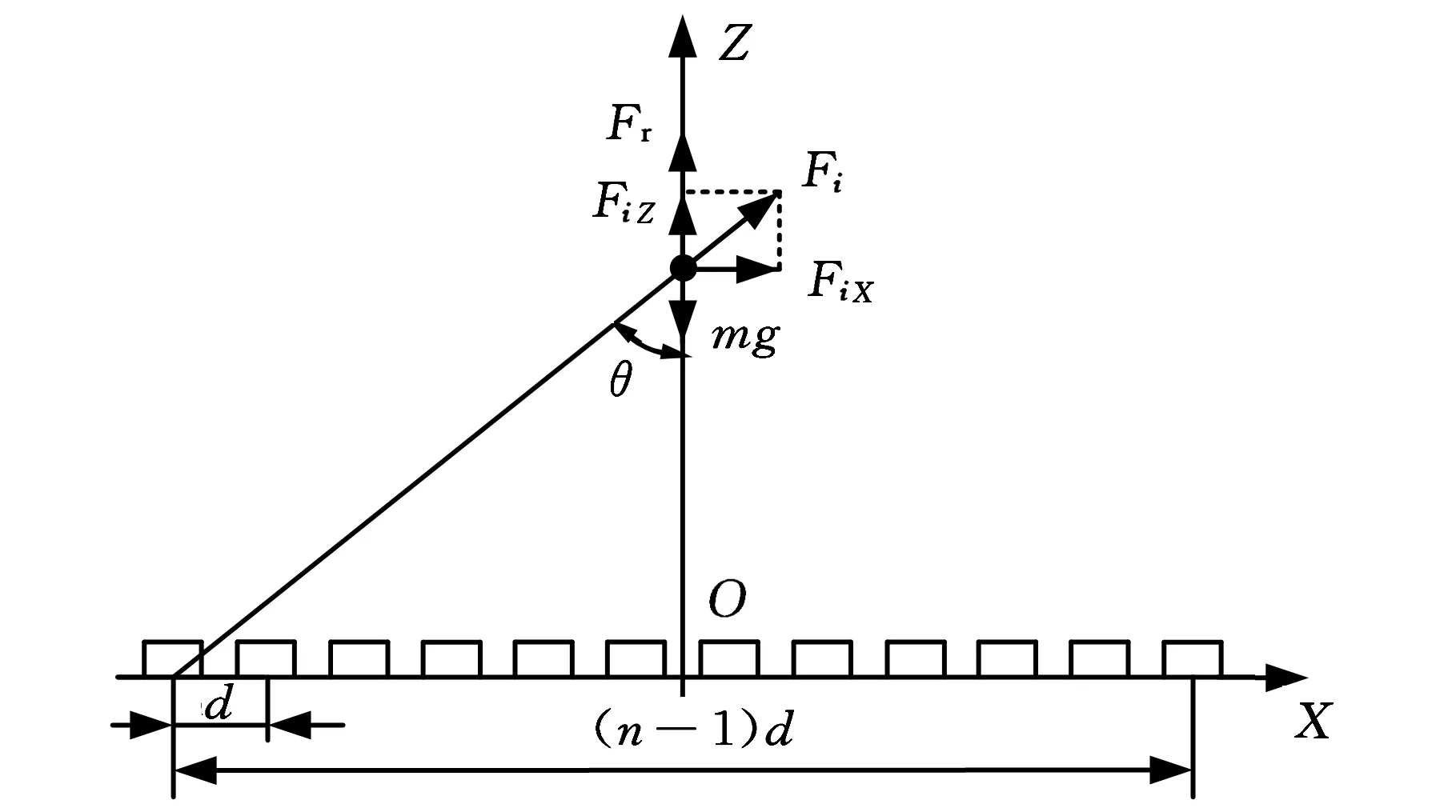
圖8 P點在Z軸上的受力分析
根據圖8中幾何關系可知,小球在豎直方向上受到重力和駐波懸浮力這一對平衡力的作用。而單個陣元對小球的輻射力主要沿陣元和小球的徑向,對其分解得到水平方向和豎直方向的兩個分力。由于陣列是對稱的,根據輻射力原理可知,最終陣列對小球的合力沿豎直方向,且大小為各豎直方向的分力之和,相當于凹面換能器聚焦。
令λρ=ρ0/ρp,建立公式:

式中,FiZ為第i個陣元Z方向的受力;b為P點在Z軸的坐標值;A為聲波幅值;ρp為粒子密度;Rs為小球半徑;Rp為粒子半徑。
可得相控陣對小球的施加的驅動力:
2.1.2P點在非Z軸上
當小球位于非Z軸的OXZ面上時,小球不超出聚焦陣列范圍,對其進行受力分析,如圖9所示。
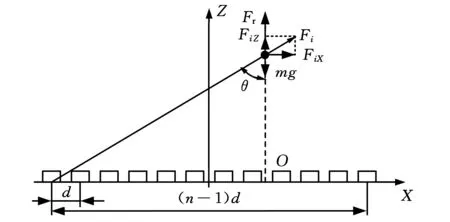
圖9 P點在非Z軸上的受力分析
由圖9可知,當小球受到其左側陣元的作用后,聲輻射力分解成向上(FiZ)與向右(FiX)的分力。同理可得小球受到其右側陣元作用的情況。下面主要分析小球受到其左側陣元的作用情況。向右的分力可表示為
所以可得向右驅動力:
其中,M表示工作的陣元個數,由于討論的是點P左側陣元,所以根據定義有
同理可得向上的驅動力:
若小球只受到其右側陣元的作用,用同樣的方法可以得到向左驅動力。
2.2微粒的駐波輻射力計算
結合聲壓一般表達式和自然邊界條件能得出輻射力表達式。本文引用King[4]、Yosioka等[5]得出的聲輻射力理論,駐波場中顆粒所受輻射力可表達為
式中,Vp為粒子體積;ρp為粒子密度;ρm為介質密度;βp為粒子可壓縮系數;βm為介質可壓縮系數。
可壓縮系數和介質中的波速相關為
β=1/(ρc2)
2.3超聲復合場物理模型
在低頻超聲駐波變幅桿端面上嵌入高頻相控超聲波陣列,如圖10所示,組合形成超聲復合場,則空間任意點位置微粒所受輻射力為駐波場輻射力和聚焦陣列超聲輻射力之矢量和,即
Fc=Fr+Fp
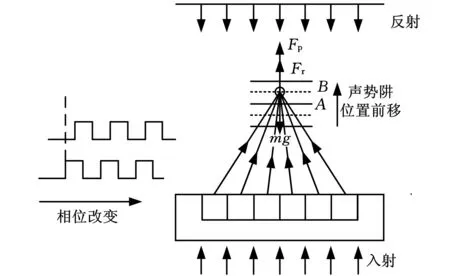
圖10 超聲復合場疊加模型
3 超聲復合場微粒輸運方案研究
3.1垂直方向微粒輸運方案
(1)相位調節。通過調整超聲波的相位,聲勢阱也會隨駐波點移動,從而使在聲勢阱中粒子產生微小的位移,實現粒子小范圍輸運。
(2)頻率調節。根據駐波原理可知超聲波的駐波點位置同樣會隨著頻率的變化而發生變化,從而使被懸浮的小球體隨著聲勢阱位置變動而移動。
(3)調節駐波和相控陣的參數。當FpZ>-Fr+mg時,即相控陣產生的驅動力大于駐波輻射力與小球體自重的差值時,小球體將受到驅動力促其向合力方向運動。
3.2水平方向微粒輸運方案
為了驅動小球在水平方向運動,首先需激發相對小球運動相反方向的部分陣元。根據小球體位置P點不在Z軸時的力學分析知,小球體主要受到豎直方向和水平方向的驅動力。在駐波的豎直方向,小球體會受到回復力Fb的作用。所以只需滿足FpZ≤Fb,小球體在豎直方向上就可實現動態平衡;水平方向的驅動力FpX即為主要驅動力,由部分聚焦陣列單元疊加產生的力牽引小球微粒運動,從而實現水平方向的動態輸運。通過超聲陣列元的調控,可綜合調節水平、豎直方向分力,從而可實現圓弧式插補運動,如圖11所示。
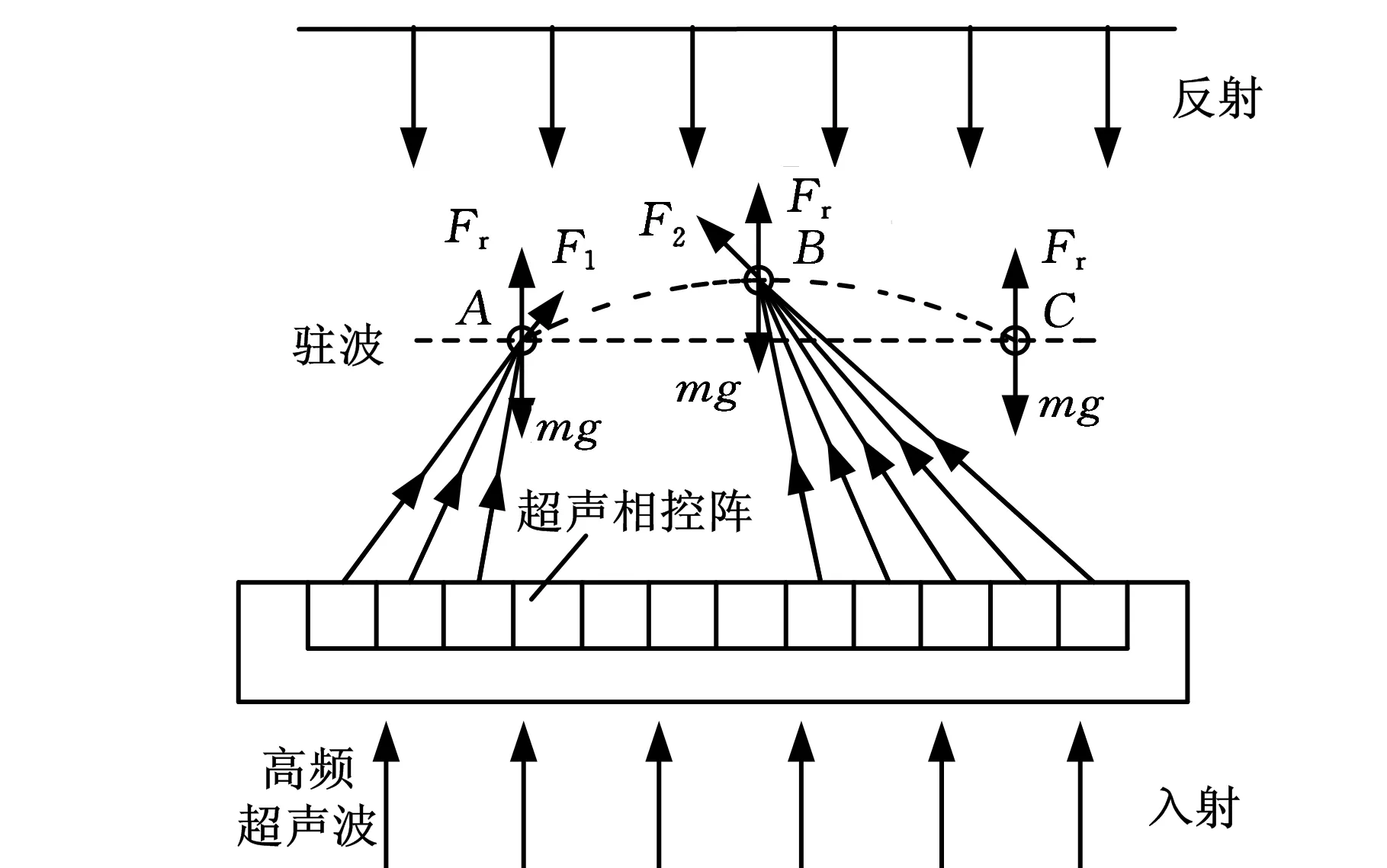
圖11 水平方向圓弧運動控制示意圖
通過豎直方向和水平方向輸運的疊加,小球微粒的輸運范圍可以擴大到二維平面任意點。圖12所示為水平方向復合場聚焦驅動微粒向右運動仿真示意圖,仿真實驗表明,在聚焦點附近能夠產生可控的聲壓動態調整微粒受力狀態。
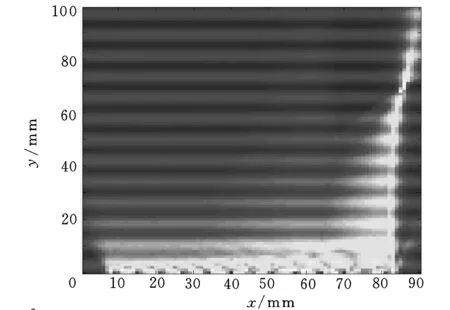
圖12 水平方向復合場仿真驅動示意圖
3.3微粒復合場輸運初步實驗
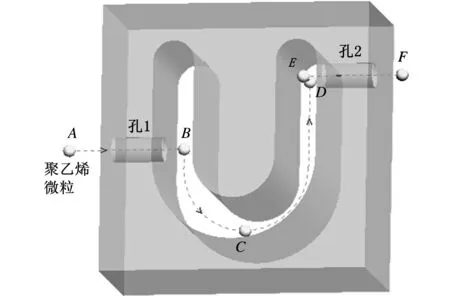
圖13 微粒輸運3D控制方案設計
根據圖10、圖11模型,在超聲駐波懸浮理論[6-7]及圖12所示的MATLAB仿真實驗的基礎上進行微粒復合場的實際實驗,為此設計了如圖13所示的微粒輸運3D控制實驗方案。聚乙烯微粒經過導入孔1進入弧形槽最終由孔2導出,途經A、B、C、D、E、F六點,形成U形軌跡,以驗證微粒在水平、豎直以及圓弧方向的懸浮運動控制。
超聲波發生器參數:f=30 kHz,功率P=300 W,振幅A=30 μm。采用指數型變幅桿,變幅桿圓形端面直徑為50 mm。
實驗用超聲相控陣換能器由換能器電路板和FPGA控制板組成[8]。正方形換能器電路板邊長為85 mm,采用換能器單元直徑5 mm,電路板上分布有285個矩陣單元[9],如圖14所示。實驗選用密度為0.015~0.03 g/cm3、直徑為3 mm的聚乙烯泡沫微粒作為初步輸運微粒,在65 mm×65 mm×35 mm鋁塊分別加工出φ5 mm的孔1、孔2以及槽寬10 mm的U形槽,如圖15所示。

圖14 矩形超聲相控陣列換能器
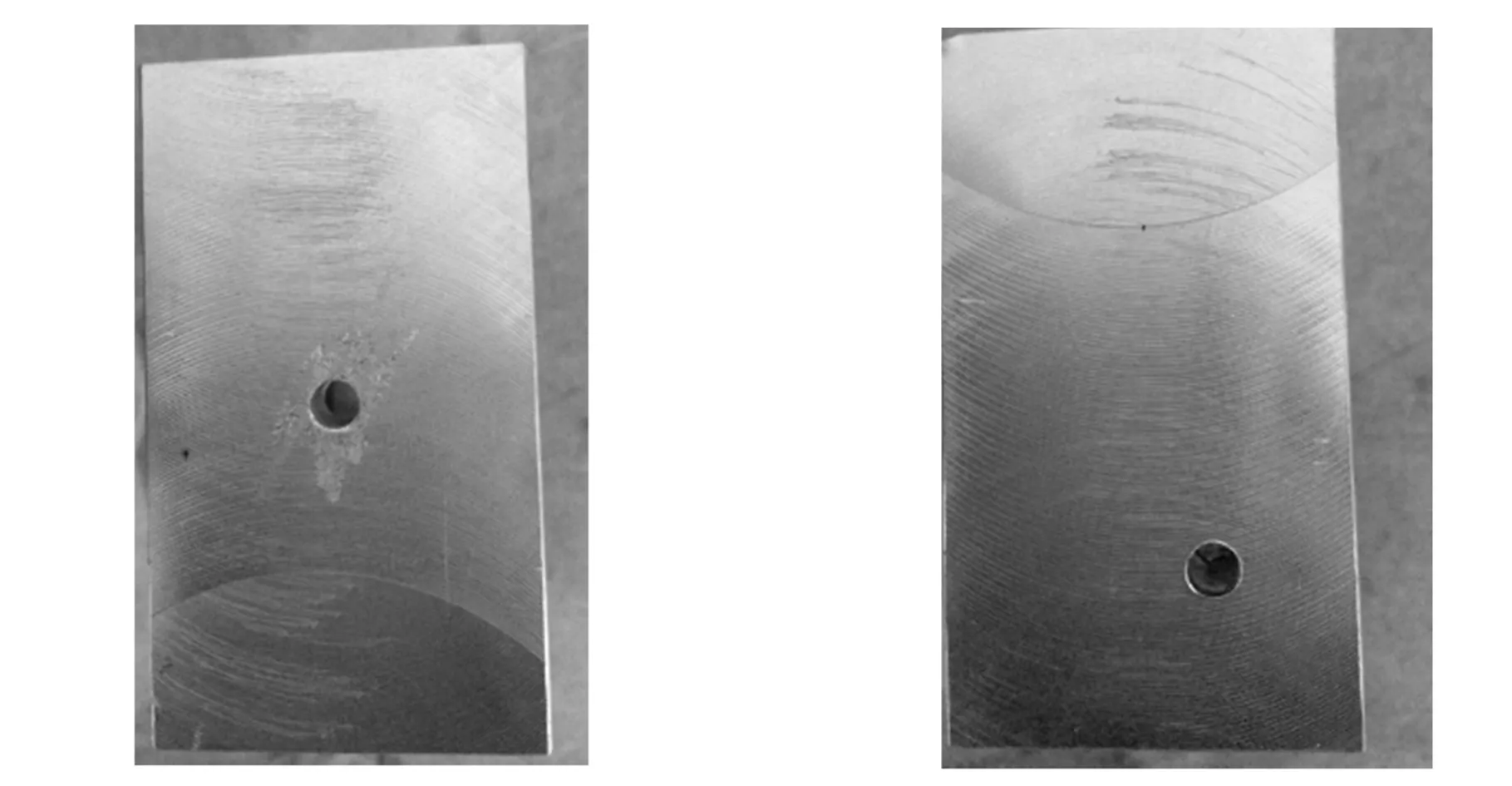
(a)孔1(b)孔2
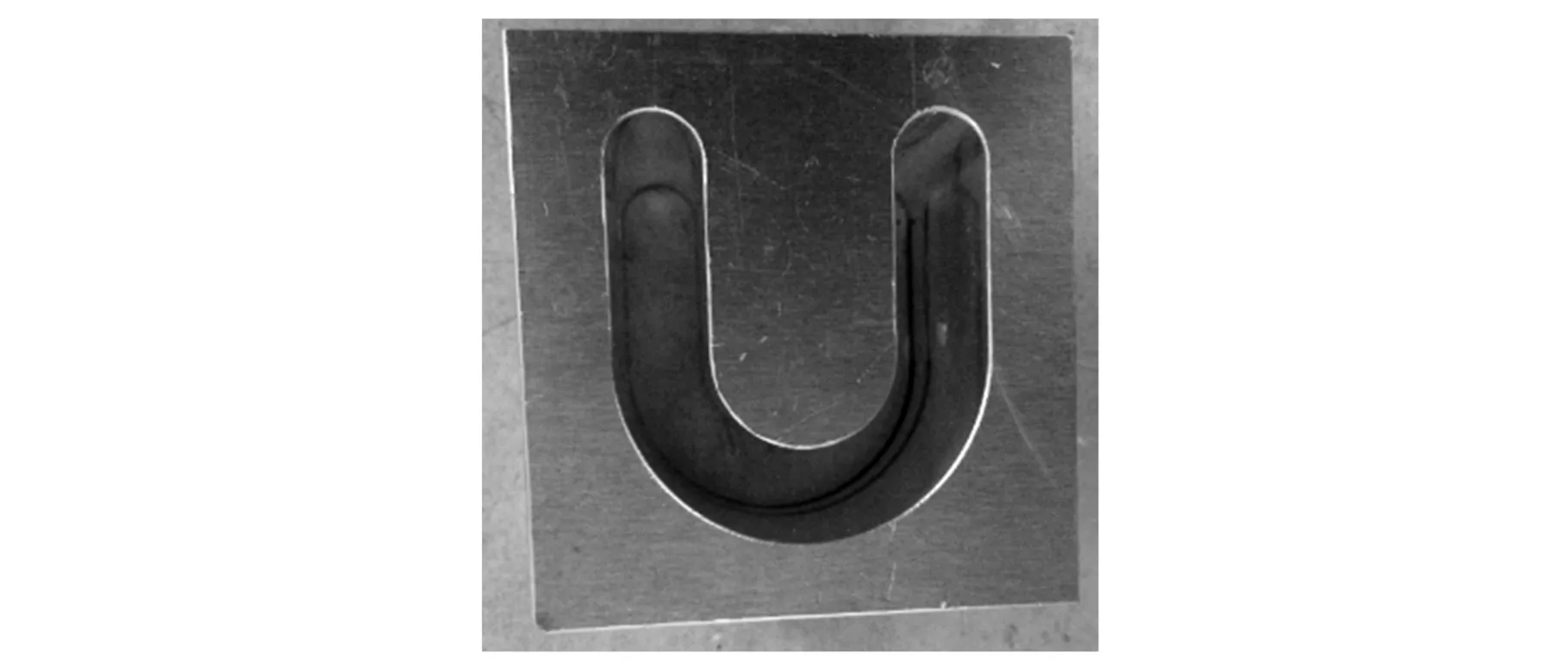
(c)“U”形槽圖15 實驗用鋁塊的“U”形內通道加工
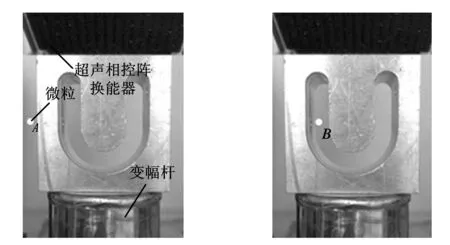
(a)微粒處于A點(b)微粒移至B點
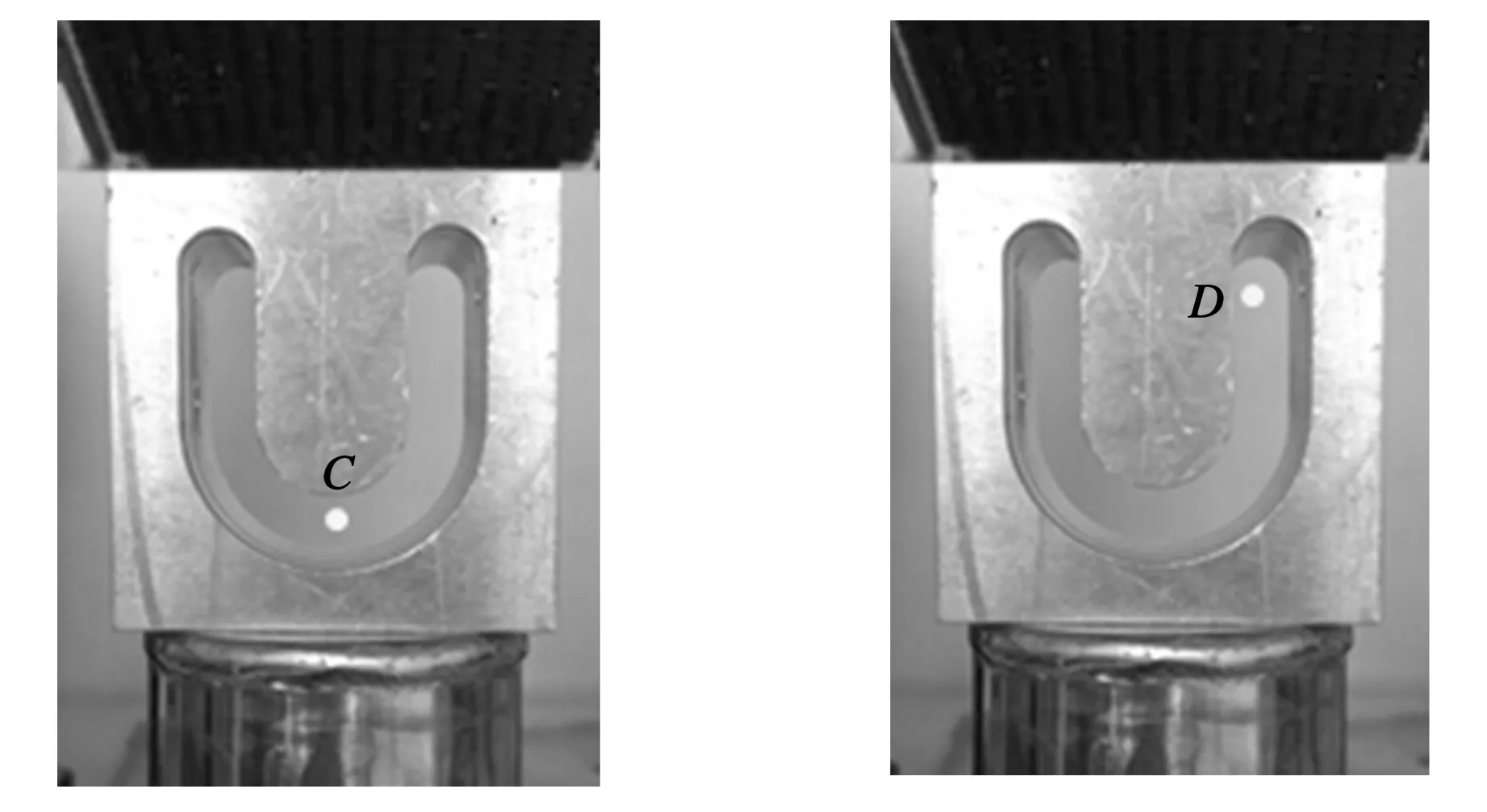
(c)微粒處于C點(d)微粒移至D點
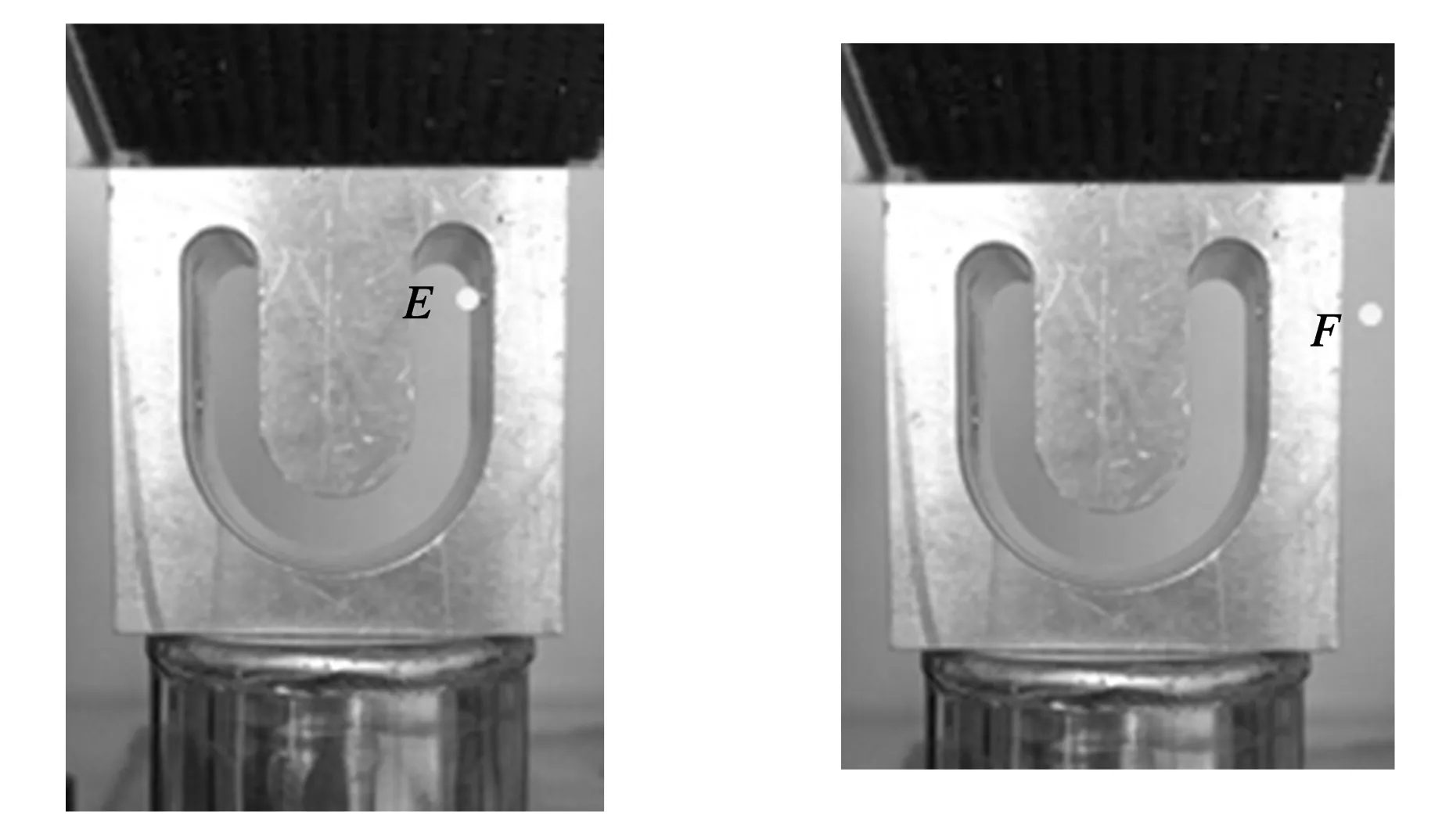
(e)微粒處于E點(f)微粒移至F點圖16 微粒的U形運動輸運控制
將超聲相控聚焦陣列器置于鋁塊頂端,變幅桿置于鋁塊下端,實驗通過在FPGA軟件中設置的陣列元的延時相位信號實現相位的延時控制,并對微粒進行動態聚焦,微粒將在復合場中的驅動力作用下在A點位置由孔1導入,如圖16a所示,途經B、C、D、E點,如圖16b、16c、16d、16e所示,最終經孔2導出至F點位置,如圖16f所示,實現預設U形軌跡的輸運,在非駐波節點上和駐波節點上,微粒在超聲復合場控制下,能夠自由地實現水平、豎直和圓弧復合運動,且具有較高的運動精度。
4 實驗討論
初步實驗選用聚乙烯泡沫微粒作為輸運對象,是由于其在超聲懸浮研究領域具有一般性。后期將對新型加工方法展開實驗研究,除了常規的磨粒之外,將采用貴金屬輔助化學腐蝕加工方法,通過把懸浮納米銀液滴輸運到物體內部進行化學反應,達到半導體硅內部加工的目的。因此,本文研究涉及的懸浮對象,既可用常規的磨粒,也可用化學反應的液滴,還可用超聲復合場的聚焦焦斑。
懸浮微粒的運動軌跡控制精度主要取決于超聲陣列的焦斑大小和尺度分辨率。在實驗中發現,聚乙烯泡沫懸浮微粒的運動軌跡控制精度受到多個參數的影響:環境中空氣流速將影響微粒的外部受力;微粒的幾何形狀將影響作用力的分布[10];不同的材料對于聲波的入射、反射、折射;超聲相控矩陣換能器的幾何結構參數(如換能器單元的直徑、矩陣單元的間距、換能器的外形尺寸、換能器的分布數量等)[11]。后期實驗將對這些影響因素做進一步細化研究。
5 結論
(1)計算和實驗結果證明,復合場驅動模型正確,在非透明材料內部實行微粒較大范圍懸浮輸運方案可行。通過超聲相控陣列任意聚焦特性補償駐波懸浮節點之間的回復力,建立動態平衡和懸浮驅動力,超聲復合場驅動方法可以實現任意點懸浮輸運的目的。
(2)超聲相控陣聚焦偏轉通過調節延時得到,根據延時原理還能進一步實現相控陣列的動態變化聚焦,焦點可在工作范圍內連續光滑移動。超聲相控陣的聚焦性能、復合場的驅動性能與陣元數量、陣元間距以及發射頻率、功率、微粒半徑等因素有著密切關系。
(3)基于超聲復合場的懸浮微粒運動控制方法能在非透明材料內大范圍懸浮驅動,超聲復合場驅動方法有利于簡化運動軌跡控制算法,較超聲駐波法更容易提高輸運控制精度,為內加工技術的實施提供更大的靈活性和操控性。
[1]師漢民.從外加工拓展到內加工——加工成形技術的一個新的發展動向[J].機械工程學報,2003,39(11):17-22.
Shi Hanmin.Development from Outer Processing to Inner Processing--a New Trend in Shape-forming Technology[J].Chinese Journal of Mechanical Engineering, 2003,39(11):17-22.
[2]李錦.超聲聚焦相控陣的研究[D].西安:陜西師范大學,2003.
[3]杜功煥,朱哲民,龔秀芬.聲學基礎[M].2版.南京:南京大學出版社,2001.
[4]King L V.On the Acoustic Radiation Pressure on Spheres[J].Proc. Roy. Soc.,A, Math. Phys. Sci, 1934,147:212-240.
[5]Yosioka K,Kawasima Y.Acoustic Radiation Pressure on a Compressible Sphere [J].Acustica,1955,5:167-173.
[6]Gor`kov L P.On the Forces Acting on a Small Particle in an Acoustical Field in an Ideal Fluid[J].Sov. Phys. Dokl,1962,6:773-775.
[7]Vandaele V,Delchambre A,Lambert P.Acoustic Wave Levitation:Handling of Components[J].J. Appl. Phys,2011,109(12):124901.
[8]范宗蔚,楊克己.基于超聲輻射力場的微構件非接觸操縱關鍵技術的研究[D].杭州:浙江大學,2013.
[9]Takayuki H,Yoichi O,Jun R.Three-dimensional Noncontact Manipulation by Opposite Ultrasonic Phased Arrays[J].Japanese Journal of Applied Physics,2014,53:75.
[10]楊賢龍.多晶硅表面超聲駐波制絨方法研究[D].成都:電子科技大學,2014.
[11]霍彥明,李國偉,陳亞珠.超聲陣列換能器設計及其聲場模擬[J].聲學技術,1999,18(4):168-172.
Huo Yanming,Li Guowei,Chen Yazhu.Design of Ultrasound Phased-array in Focused Ultrasound and the Simulation of Its Acoustic Field[J].Technical Acoustics,1999,18(4):168-172.
(編輯王旻玥)
Approach to Arbitrary Transportation of Suspended Particles Based on Ultrasonic Composite Field
Zhuang LongWu LiqunDu XibiaoZhang Linan
Hangzhou Dianzi University,Hangzhou,310018
A particle suspension transport method was proposed based on ultrasonic composite field.Firstly,the array focusing model and accumulated force equation were established based on phased array ultrasonic cells delay,then integrated with the standing wave ultrasonic field radiation force calculation method, the particle motion control model and driving force formula under the combined ultrasound field were introduced.Through the MATLAB simulation of complex ultrasound field, the factors that affected the focusing performance and control performance were analysed,and the preliminary test results were given and discussed.Finally,arbitrary control scheme of particle motion was put forward by compound ultrasonic driving field.
inner machining; ultrasonic suspension; composite field; particle transportation
2015-05-19
國家自然科學基金資助項目(51175134);浙江省自然科學基金資助項目(LZ15E050004;LY15E050024)
O426.9DOI:10.3969/j.issn.1004-132X.2015.22.010
莊龍,男,1985年生。杭州電子科技大學機械工程學院碩士研究生。主要研究方向為聲懸浮,微納加工。吳立群,男,1965年生。杭州電子科技大學機械工程學院教授、碩士研究生導師。杜錫標,男,1989年生。杭州電子科技大學機械工程學院碩士研究生。張俐楠,女,1986年生。杭州電子科技大學機械工程學院講師。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50