用于肩關節康復訓練的單輸入三轉動輸出并聯機構及其運動學設計
2015-10-29 05:09:50沈惠平楊梁杰鄧嘉鳴張曉玉沈曉軍
中國機械工程 2015年22期
關鍵詞:康復
沈惠平 楊梁杰 鄧嘉鳴 張曉玉 沈曉軍
1.常州大學,常州,213016 2.國家康復輔具研究中心,北京,100176
用于肩關節康復訓練的單輸入三轉動輸出并聯機構及其運動學設計
沈惠平1楊梁杰1鄧嘉鳴1張曉玉2沈曉軍2
1.常州大學,常州,213016 2.國家康復輔具研究中心,北京,100176
根據人體肩關節的運動生理特點和康復機理,將三轉動并聯機構運用于人體球窩肩關節的康復訓練,設計了一種單輸入三轉動輸出并聯式肩關節康復訓練機構;通過分析該機構的拓撲結構特性,計算出了該機構的耦合度為零,因此,可以直接推導出其位置正逆解析解,而無需復雜的代數消元推導計算;在ADAMS環境下進行了運動仿真,仿真結果證實了設計的可行性;應用UGNX軟件設計了該肩關節的康復訓練虛擬樣機,為實體樣機的設計與研制提供了參考。
并聯機構;康復機器人;肩關節;運動學分析
0 引言
肢體運動功能障礙逐漸成為影響老年人和殘障人士正常生活的常見問題,約70%的患者存在不同程度的上肢運動功能障礙[1]。上肢運動功能的恢復對患者的日常生活能力影響很大,已成為現代康復醫學和醫療工程的研究熱點。
肩關節是人體上肢活動的基礎,通過肩關節的活動,可以實現上肢的大范圍運動,肩關節運動功能的康復是肘、腕、指關節運動功能康復的前提條件。同時,單關節訓練是復合動作訓練的基礎,在康復的初期和中期,患者的情況也不允許做復合運動[2]。傳統的康復訓練方法是康復治療師的徒手操作或采用簡單的器械輔助患者進行康復運動,這些方式的訓練效率和訓練強度難以保證,已不能滿足患者的要求。因此,根據“按需輔助”的原則[3],鼓勵患者發揮自主能動力,從傳統的人工被動引導模式向機器運動模式轉變,研發單獨針對肩關節的康復訓練機構具有較大的實際應用價值。
康復訓練機器人研究的起步時期是20世紀80年代,目前美國、英國、日本等國家已處于領先地位,我國對康復訓練機器人的研究相對較晚。然而,國外單獨針對肩關節的并聯康復裝置很少,大多是針對整個人體上肢(包括腕、肘、肩關節)的康復訓練裝置,并且這些裝置結構原理大多較為復雜。比如,瑞士蘇黎世大學開發的新型上肢康復機器人ARMin,具有6個自由度和4種運動模式,安裝有力傳感器和位移傳感器,可協助患肢的肩關節、肘關節進行復合運動[4];美國麻省理工學院設計的上肢康復訓練機器人MIT-MANUS[5]具有2個自由度,采用五連桿機構,由2個無刷電機直接驅動,用于患者的肩、肘在水平和豎直平面內的運動,有助于恢復患者由于中風而癱瘓的肩部和肘部的運動功能。國內現有的肩關節康復訓練裝置大多是公共場所的健身器械,通過手握把手做圓周運動,改善肩關節、肘關節、腕關節柔韌性與靈活性。國內高校也研制了一些上肢康復訓練裝置,如哈爾濱工業大學研發的五自由度穿戴式外骨骼上肢康復機器人[6],它能夠完成肩、肘、腕部單關節運動、雙關節及三關節復合運動。
本文創新設計了一種新型并聯式肩關節康復訓練裝置,其主機構為文獻[7]提出的單輸入三轉動輸出并聯機構{-R-R-S-}+{-S-S-}+{-S-},該機構契合人體球窩肩關節的三轉動特征。
1 問題的提出
人體肩關節作為全身最靈活的球窩關節,有3個轉動自由度,即在3個相互垂直的運動軸上可進行屈伸、收展、環轉的運動[8]。
以下為敘述方便,以人體右上肢為例,設定肩關節坐標系為OXYZ,如圖1所示。其中,坐標原點O與在冠狀面內的肩關節球窩重合;X軸垂直于冠狀面,方向與矢狀軸一致;Y軸在冠狀面內且垂直于水平面,方向與垂直軸一致;Z軸在冠狀面內,方向與冠狀軸相反。如圖2所示,根據人體運動生理學[9]特征可得肩關節的運動方式。
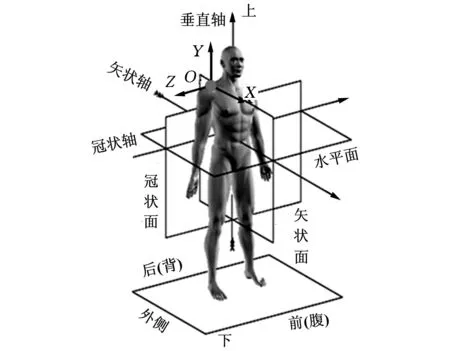
圖1 人體肩關節坐標系
(1)圖2a所示為前屈、后伸運動[10]。在矢狀面(OXY面)內,右手臂繞Z軸旋轉,從Z軸開始順時針為后伸,逆時針為前屈。正常運動范圍為:前屈0°~ 180°,后伸0°~ 50°。
(2)圖2b所示為外展、內收運動。在冠狀面(OYZ面)內,右手臂繞X軸旋轉,從X軸開始順時針為外展,逆時針為內收。正常運動范圍為:外展0°~ 180°,內收0°~ 45°。
(3)圖2c所示為環轉運動。在平行于水平面(OXZ面)內,右手臂繞Y軸旋轉為環轉。正常運動范圍為:從Y軸開始順時針0°~ 30°,逆時針0°~ 140°。
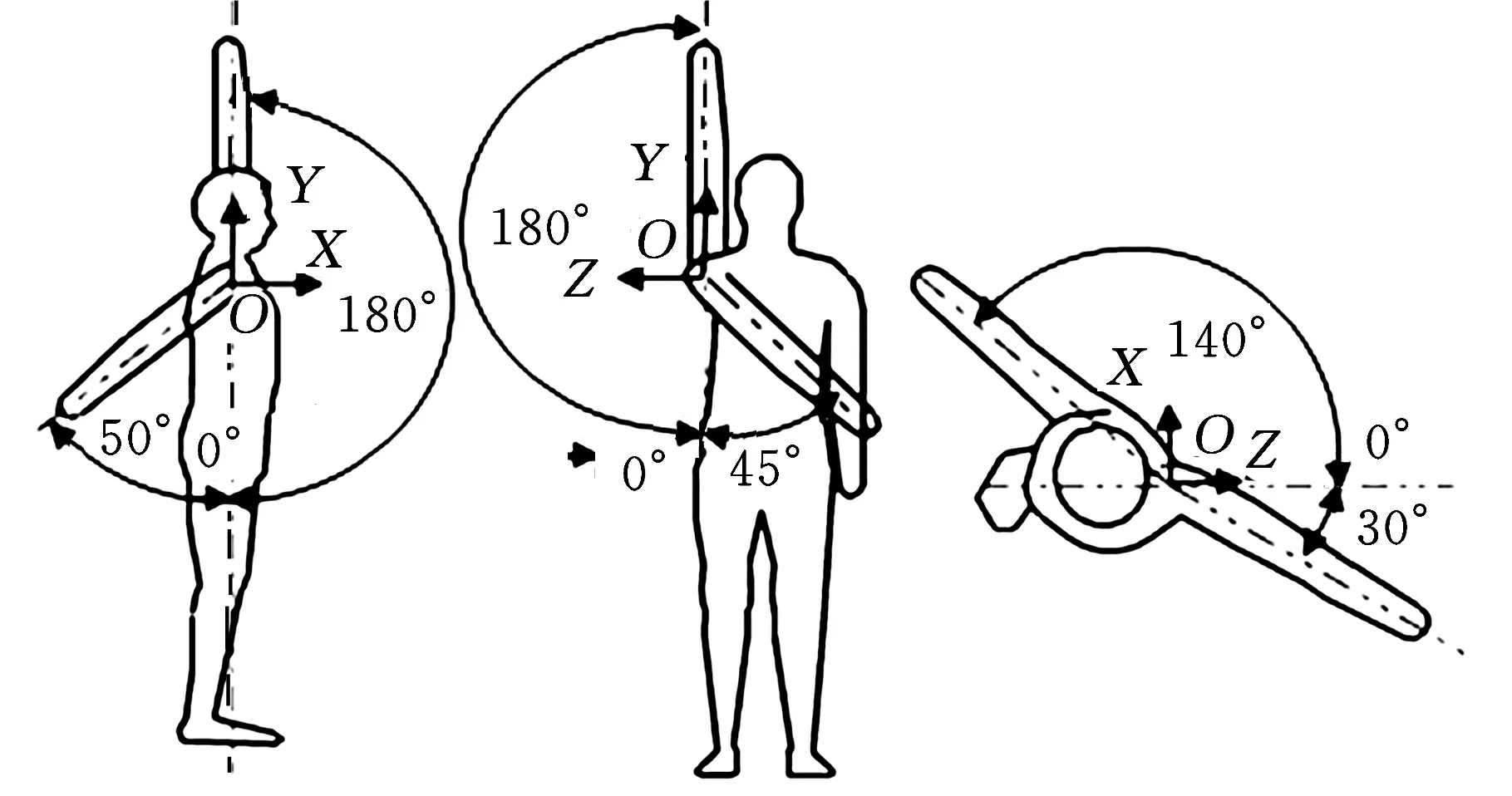
(a)前屈、后伸(b)外展、內收(c)環轉圖2 人體肩關節運動形式
顯然,上述肩關節康復訓練機構必須實現繞球窩前屈后伸、外展內收、環轉的3個轉動輸出,這是設計肩關節康復訓練機構的基礎。
2 肩關節康復訓練機構的設計
2.1機構設計
本文提出一種新型的并聯式肩關節康復訓練裝置,其主機構為單輸入三轉動輸出并聯機構,如圖3a所示。該機構由3條簡單支鏈SOC1{-R11‖R12-S13-}、SOC2{-S21-S22-}和SOC3{-S31-},連接動平臺(上臂)及靜平臺(肩座)組成,如圖3b所示。這里,穿戴并固定于人體的肩座相當于并聯機構的靜平臺,人體上臂的肩關節為球(肱骨頭)窩(肩胛盂)關節,當作了球副(S31);人體的上臂本身當作了動平臺,因此,簡化了機構的組成。只要肩座的安裝位置準確,認為S31與人體肩關節球窩充分重合,因S31與人體肩關節球窩不充分重合引起的該處到其他各關節的距離變化微小,可以忽略。
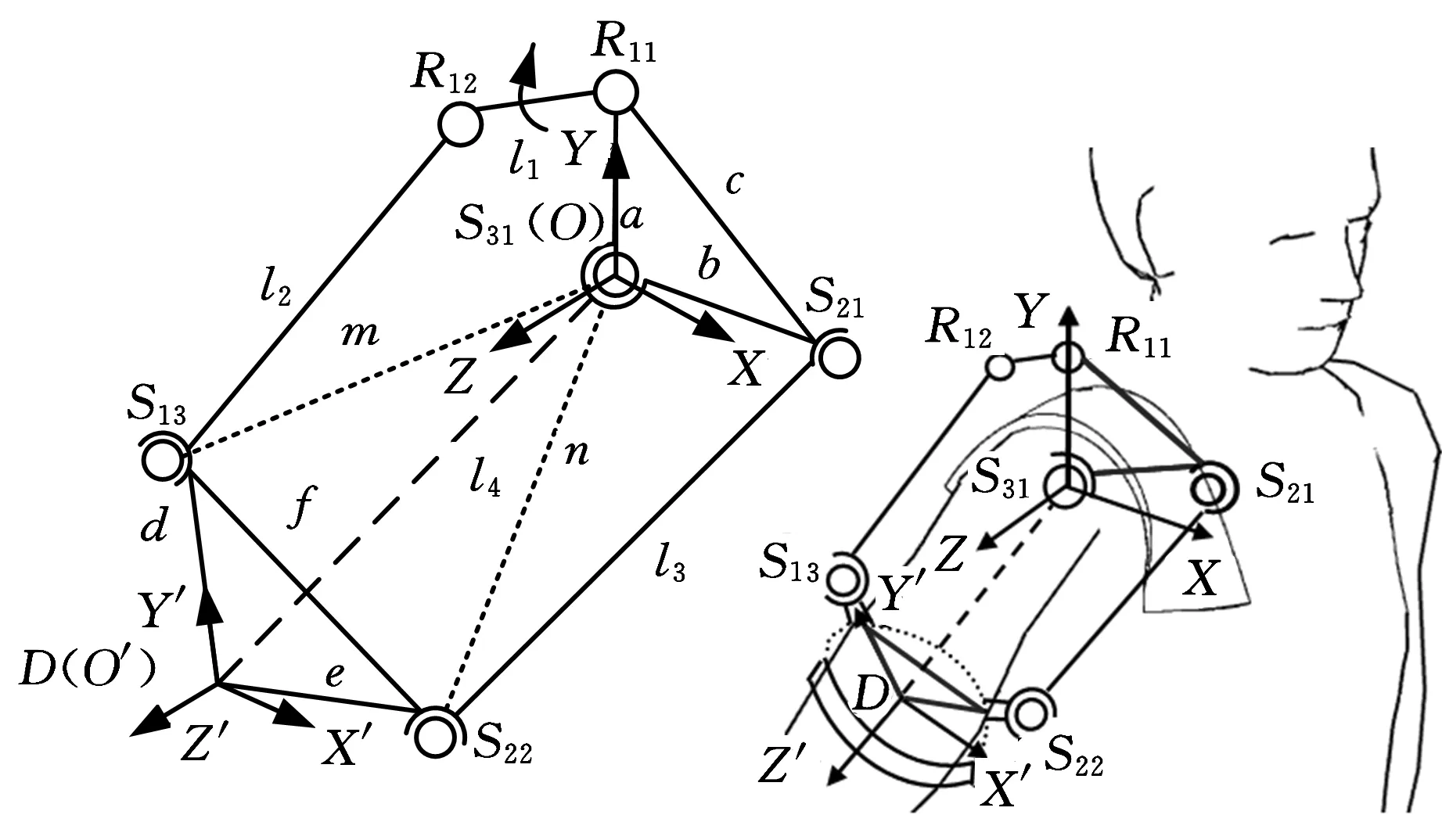
(a)單輸入三維轉動輸出并聯機構簡圖(b)肩關節康復訓練裝置的安裝圖3 新型并聯康復訓練機構
該機構的自由度為1,僅需1個輸入,而具有3個轉動輸出,其中,僅1個轉動為獨立運動,另2個轉動為非獨立的寄生(衍生、派生)運動。現證明如下。
2.2機構自由度計算
2.2.1自由度計算
根據文獻[11],具有v個獨立回路的并聯機構可視為由動靜平臺和兩者之間并聯的v+1條支路組成,則并聯機構的自由度F為
(1)
(2)
式中,fi為第i個運動副的自由度;m為運動副數;v為獨立回路數;ξLj為第j個獨立回路的獨立位移方程數;dim{*}為求維數函數;Mbi為第i條支路末端的方位特征集(positionandcharacteristics,POC)。
于是,由SOC1、SOC3組成的第一個獨立回路的ξL1為
ξL1=dim{Mb1∪Mb3}=
(3)
其中,M的下標b1、b3表示支鏈1、3;t、r表示移動和轉動;t(0)、t(1)、t(2)分別表示0、1、2個移動,r(3)表示3個轉動,下同。式(3)中,大括號中元素為非獨立元素,用中括號括起來的元素為獨立元素,下同。詳見文獻[11]。
該子并聯機構的自由度為
該子并聯機構動平臺的方位特征集為
Mpa(1-3)=Mb1∩Mb3=
其中,M的下標pa(1-3)表示由支鏈1、3組成的子并聯機構。
由該子并聯機構與SOC2組成的第二個獨立回路的ξL2為
ξL2=dim{Mpa(1-3)∪Mb2}=
因此,由式(1)可知,該并聯機構的自由度為
2.2.2輸出平臺的方位特征分析
2.3機構耦合度分析
由文獻[11]可知,獨立回路數為v的基本運動鏈(basickinematicchain,BKC)可由v個單開鏈(SOC(Δj),j=1,2,…,v)依次連接而成,則耦合度κ為
(4)
式中,Δj為第j個SOCj的單開鏈SOCj約束度;mj為第j個SOCj的運動副數;Ij為第j個SOCj的驅動副數。
式(4)中,應選取BKC分解為v個SOC(Δj)時,回路可能分配方案中∑|Δj|的最小值,則機構的耦合度κ值計算過程如下。
取第1個單開鏈為SOC1{-R11‖R12-S13-S31-},因ξL1=6,I1=1,所以
取第2個開鏈為SOC2{-R(S13-S31)|S22-S21-},因ξL2=6,I2=0,所以
這樣,該機構包含2個基本運動鏈,其耦合度均為κ=0,因此,可直接推導出解析解,而不必進行復雜的數學推導、消元計算。
3 機構運動學分析
為方便計算,設定該機構的靜坐標系與第1節建立的肩關節坐標系完全重合一致,如圖3b所示,并選定肩關節球窩S31與靜坐標系原點O重合,Y軸為S31R11方向,X軸垂直于Y軸,Z軸由右手螺旋確定。如圖3a所示,R11的轉動軸線與X軸平行。選取D為動坐標系原點O′,Y′軸為DS13方向,X′軸垂直于Y′軸,Z′軸由右手螺旋確定。由于動平臺面ΔDS13S22與桿DS31桿固結且垂直,是一個整體,所以DS31桿為一虛擬桿,實際為人體上臂懸架的中心線,如圖3b所示。

Rα,β,γ=Rα,xRβ,yRγ,z=

其中,s、c分別代表sin、cos,則動平臺上任意一點Si在靜坐標系下的坐標可表示為
Si=Rα,β,γSi′+p
(5)
式中,Si、Si′為該點在靜動坐標系下的坐標;p為動坐標系原點O′在靜坐標系下的坐標。
3.1位置正解求解式
正解問題歸結為已知輸入角θ,求動平臺的姿態角,即上臂的三個擺動角α、β、γ。
3.1.1靜坐標系下所有點的坐標表示

(2)求點S13的坐標。設桿R12S13與Y軸的夾角為θ′,則S13坐標為(0,a+l1cosθ+l2cosθ′,l1sinθ+l2sinθ′),即XS13=0,YS13=α+l1cosθ+l2cosθ′,ZS13=l1sinθ+l2sinθ1,由幾何條件lS31S13=m可知:
(a+l1cosθ+l2cosθ′)2+(l1sinθ+l2sinθ′)2=m2
求得
(6)
A1=2l2(a+l1cosθ)B1=2l1l2sinθ
(3)求點S22的坐標。設點S22的坐標為(XS22,YS22,ZS22),由幾何條件,lS22S21=l3,lS22S31=n,lS22S13=f可得S22點的位置如下:
(7)
B2=2u1(k1-XS31)+2u2(k2-ZS31)-2YS31
u1=
k1=
u2=
k2=
(4)求點D的坐標
由幾何條件lDS13=d,lDS31=l4,lDS22=e,用同樣的方法易求出點D的位置如下:
(8)
B3=2u3(k3-XS31)+2u4(k4-ZS31)-2YS31
u3=
k3=
u4=

由式(5)可得S13、S22在靜坐標系下的坐標:
(9)
(10)
由式(9)及式(10)得

E2=dcosγE3=-dsinβsinγ
E4=YD-YS13
3.2位置逆解的求解
已知動平臺姿態角α、β、γ中的任一個角,求機構的輸入驅動θ。
S13的坐標可由式(9)表示。
由幾何約束lR12S13=l2,可求出θ:
(11)
A4=-2l1(YS13-a)
B4=-2l1ZS13
設計肩關節康復機器人裝置,必須考慮人體肩和上肢的運動范圍,根據國家標準《中國成年人人體尺寸》(GB10000-1988),正常成人男性的上臂長小于等于333mm,上臂圍為275mm左右[12]。
選取該康復訓練機構的結構參數如下:a=70mm,b=95mm,c=108mm,d=60mm,e=60mm,f=64mm,l1=18mm,l2=105mm,l3=110mm,l4=100mm。
例選取θ=30°、150°、270°,則由式(6)~式(11)通過MATLAB編程,計算出該機構的轉動輸出角α、β、γ分別有8組正解,如表1所示。分別將這8組正解值代入逆解方程(式(11)),可得到主動輸入轉角θ,從而驗證了位置正解求解的正確性。
若取曲柄的轉動角速度為ω=30°/s,通過ADAMS仿真,得到動平臺姿態角α、β、γ變化規律,如圖4中的1、2、3曲線所示,且與表1中通過MATLAB編程得到的No.4、No.12、No.20正解值完全一致,從而驗證了正反解的正確性。
由圖4可知,α的取值范圍為-54.5°~27.3°,β的范圍為-2.9°~17.6°,γ的取值范圍為-31.7°~6.6°,即該機構可實現前屈0°~31.7°,后伸0°~6.6°,外展0°~44.5°,內收0°~27.3°,環轉-2.9°~17.6°。
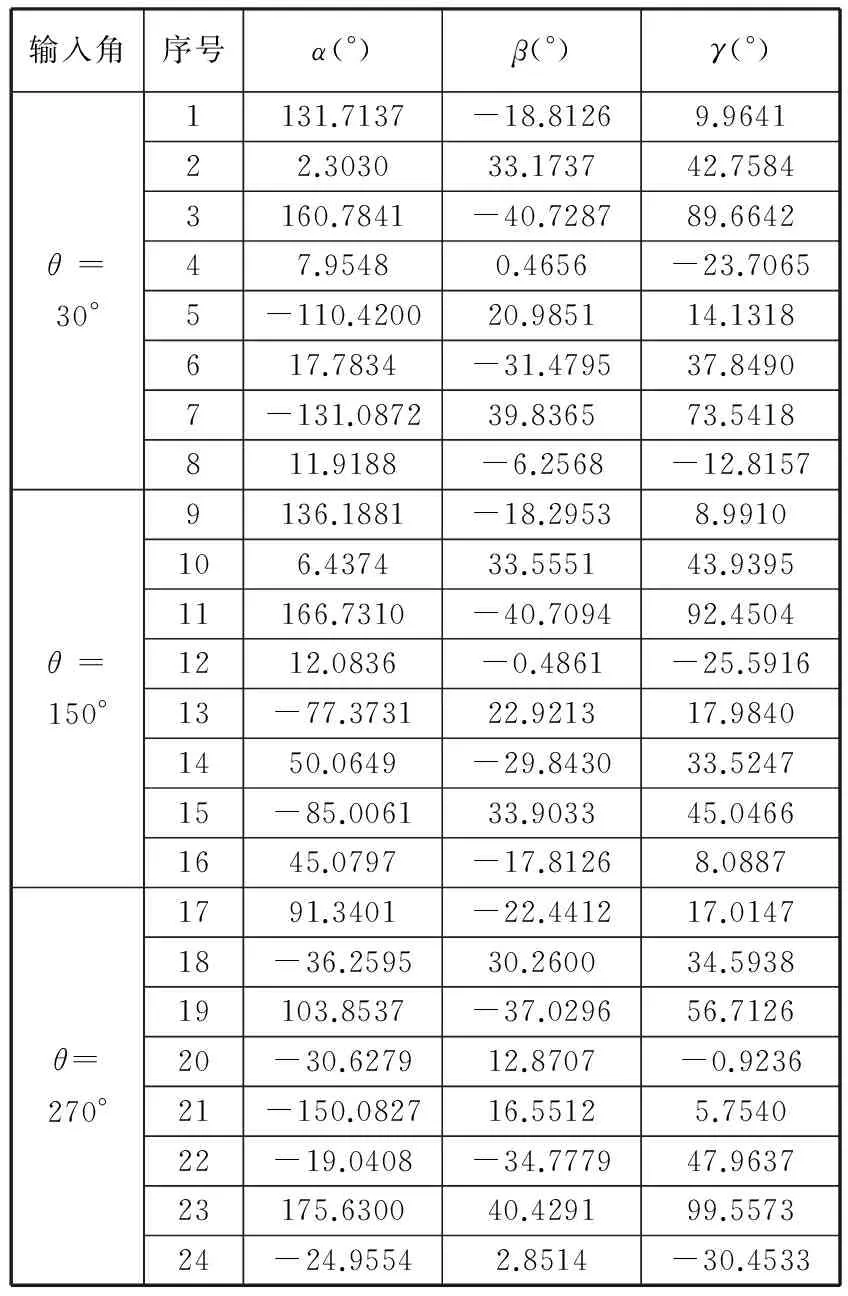
表1 機構正解數值算例解
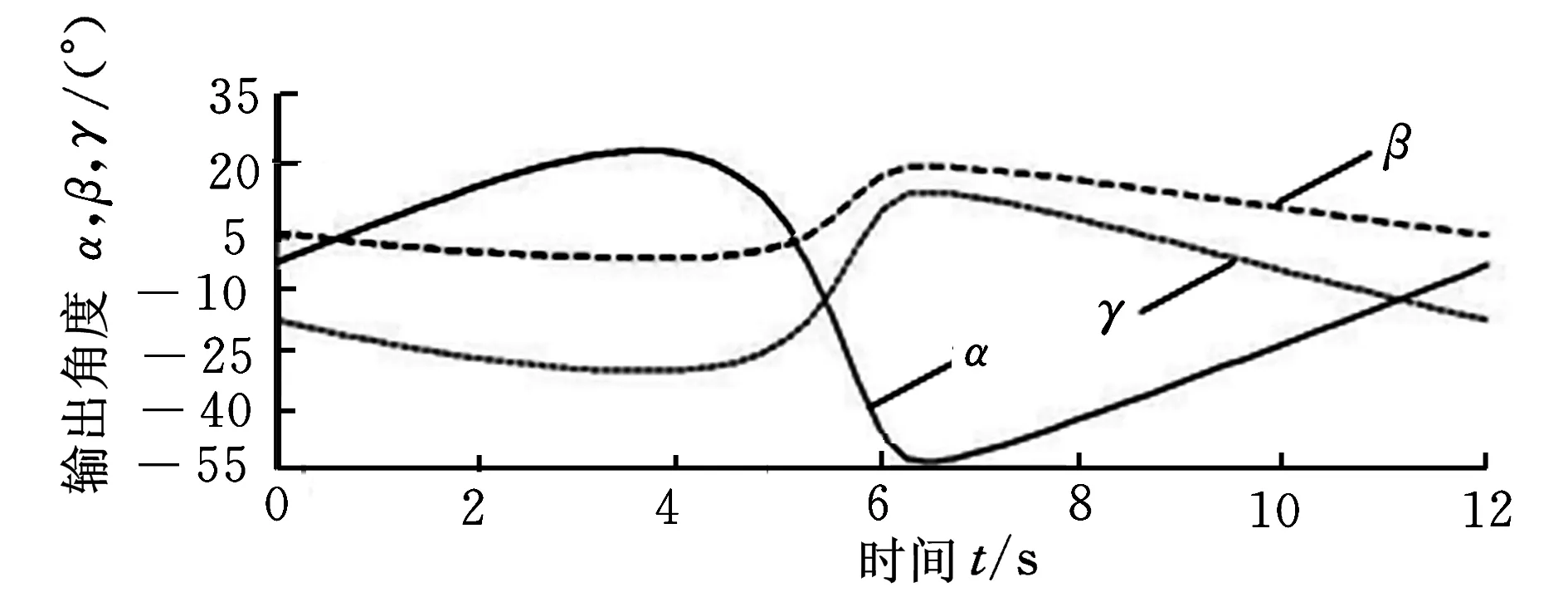
圖4 α、β、γ變化曲線
不難發現,該機構實現的肩關節的3個轉動輸出在正常人體肩關節的活動度范圍之內,對骨折早期(制動期)活動度受限的患者,也可實現小范圍、勻速慢速的肩關節康復。由于該機構的三個轉動輸出并不獨立而是表現為一種復合運動,所以該機構還可以應用于中醫推拿,它的復合運動類似推拿的“搖法”,使肩關節產生被動性的環形運動,可以代替人工推拿,起到器械康復輔助作用。
4 康復訓練虛擬樣機設計
在UGNX軟件中完成的肩關節康復訓練虛擬機設計,如圖5所示。
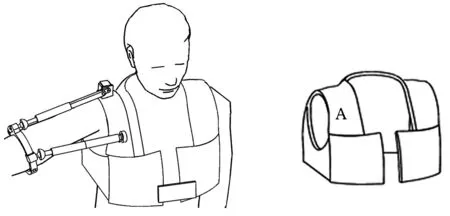
(a)整體樣機(b)穿戴裝置

(c)主機構(d)穿戴環架圖5 并聯式肩關節康復訓練虛擬樣機
該康復裝置需穿戴于人體上,穿戴裝置(圖5b)材料可采用工程塑料;其主構件(圖5c)采用輕質的鋁合金材料;主構件的肩座部分B與穿戴裝置A部分用鉚釘固定在一起。為便于穿戴,與人體上臂固定的圓形穿戴環架由兩個半環通過鉸鏈D連接(圖5d);為了適應不同康復訓練者人體尺寸的要求,穿戴環架上的球副架E固定,而球副架F則可沿圓形穿戴環架移動,并通過螺栓G與穿戴環架固定,以便于調節尺寸。
該裝置可有效用于某些肩關節病癥患者的康復訓練,其訓練方式仍屬于被動康復方式,但具有結構緊湊、驅動件少、加工裝配簡易、患者自主使用操作方便、無需康復治療師幫助等優點[13],其樣機研制詳見文獻[14]。
5 結論
提出將三轉動并聯機構運用于人體球窩肩關節的康復訓練,創新設計了一種基于單輸入三轉動輸出并聯機構{-R-R-S-}+{-S-S-}+{-S-}的新型肩關節康復訓練機構,拓展了并聯機構在人體康復工程中的應用范圍。
(1)通過該機構的拓撲結構分析,計算出機構的耦合度為零,因此,直接推導出其位置解析正逆解;并在ADAMS環境下對該裝置進行了運動學仿真,驗證了設計的可行性。
(2)用UGNX設計了可穿戴于人體的肩關節康復訓練虛擬樣機,并對有關的安裝部件的結構設計、裝置的使用進行了說明。
(3)該并聯式肩關節康復訓練機構具有結構簡單、制造成本低、輕量化、可穿戴、攜帶方便等優點,患者自主使用操作方便,無需康復治療師幫助,即可實現人體肩關節的康復運動訓練要求,為人體肩關節康復訓練提供了一種新的康復方案和器具。
[1]姬程.上肢康復機器人系統模型建立及仿真研究[D].沈陽:東北大學,2010.
[2]郭力云,季林紅,王子羲.肩肘單關節康復訓練機器人的功能和臨床康復效果[C]//中國殘疾人健康協會2005年國際康復論壇暨第六次全國康復醫學工程與康復工程學術研討會.西安,2005:148-151.
[3]嚴華,楊燦軍.上肢康復訓練外骨骼機器人技術研究進展[J].世界康復工程與器械,2012,2(2):9-13.
Yan Hua,Yang Canjun,Progress in Research of Upper Limb Rehabilitation Training Exoskeleton Robot Technology[J].International Rehabilitation Engineering & Device,2012,2(2):9-13.
[4]Nef T,Mihelj M,Riener R.ARMin:A Robot for Patient-cooperative Arm Therapy[J].Medical and Biological Engineering and Computing,2007,45(9):887-900.
[5]Krebs H I,Hogan N,Aisen M L,et al.Robot-aided Neurorehabilitation[J].IEEE Transactions on Rehabilitation Engineering,1998,6(1):75-87.
[6]車仁煒,呂廣明,孫立寧.五自由度康復機械手臂的設計[J].機械設計,2005,22(4):18-21.
Che Renwei,Lü Guangming,Sun Lining,et al.The Design of the 5-dof Rehabilitation Mechanical Arm[J].Journal of Machine Design,2005,22(4):18-21.
[7]沈惠平,余同柱,尹洪波,等.一種單自由度三維運動裝置:中國,201210307592.2[P].2012-11-21.
[8]沈志祥.運動與康復[M]. 北京:北京大學醫學出版社,2008.
[9]趙江洪,譚浩.人機工程學[M].北京:高等教育出版社,2006.
[10]楊勇.手臂康復機器人系統研究[D].哈爾濱:哈爾濱工程大學,2009.
[11]楊廷力,劉安心,羅玉峰,等.機器人機構拓撲結構設計[M].北京:機械工業出版社,2012.
[12]蔡峰.肩關節康復訓練機器人的設計與研究[D].大連:大連交通大學,2012.
[13]沈惠平,楊梁杰,鄧嘉鳴,等.一種并聯式肩關節康復訓練機:中國,201310338095.3[P].2013-08-06.
[14]楊梁杰,并聯式肩關節康復訓練機構的設計與研制[D].常州:常州大學,2014.
(編輯王艷麗)
A One-input Three-rotation Output Parallel Mechanism and Its Kinematics Design Used for Shoulder Rehabilitation
Shen Huiping1Yang Liangjie1Deng Jiaming1Zhang Xiaoyu2Shen Xiaojun2
1.Changzhou University, Changzhou,Jiangsu,213016 2.National Research Center for Rehabilitation Technical Aids, Beijing, 100176
According to the physiological characteristics and rehabilitation mechanism of human shoulder,a three-rotation parallel mechanism used in rehabilitation training of human ball-and-socket shoulder joint was proposed, and a single-input and three-rotation output parallel shoulder rehabilitation training device was designed. Through the analysis of topological structure of the mechanism, its coupling degree was calculated to be zero, so its forward and inverse displacement solution was directly deduced, without the needs for complex algebraic elimination derivation calculation. The motion simulation was finished by ADAMS and the feasibility of the design was confirmed by its simulation results. Finally, the rehabilitation training virtual prototype was designed by UGNX software, which laid a foundation for the design and manufacture of the prototype.
parallel mechanism;rehabilitation robot; shoulder joint;kinematics analysis
2014-06-16
國家自然科學基金資助項目(51075045,51375062)
TP242DOI:10.3969/j.issn.1004-132X.2015.22.001
沈惠平,男,1965年生。常州大學機械工程學院教授、博士研究生導師。主要研究方向為機構學、并聯機器人、機械設計。獲省、部級科技進步二等獎2項。獲發明專利35項。發表論文140余篇。楊梁杰,女,1990年生。常州大學機械工程學院碩士研究生。鄧嘉鳴,男,1963年生。常州大學機械工程學院副教授。張曉玉,男,1949年生。國家康復輔具研究中心教授。沈曉軍,男,1978年生。國家康復輔具研究中心助理工程師。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45