抽油機電動機動態載荷模擬仿真優選技術研究
2015-10-26 03:31:59李付龍盧正通山東科技大學自動化學院
石油石化節能 2015年3期
關鍵詞:抽油機
李付龍 盧正通(山東科技大學自動化學院)
抽油機電動機動態載荷模擬仿真優選技術研究
李付龍盧正通(山東科技大學自動化學院)
根據抽油機電動機動態載荷的工況,建立了異步電動機仿真模型,采用PID算法調節電動機扭矩使電動機優化運行,通過異步電動機建模的特例對常用四種電動機的恒功率和恒扭矩動態載荷能耗情況進行仿真分析。仿真結果表明:在含少量倒發電的正常油井工況下,永磁電動機在功率因數上有明顯的優勢,而開關磁阻和高轉差電動機具有更高的效率及性能。該仿真控制模型驗證了抽油機動態載荷的電動機性能,為油井電動機的優選與改造提供了依據。
抽油機電動機動態載荷仿真實驗研究
在油田生產過程中,抽油機電動機是油田主要的電力拖動系統設備,由于抽油機的載荷周期劇烈波動,在分析和計量時較為復雜,這種工況給油井電力系統與電動機功耗匹配帶來了困難,甚至抽油機經常會出現倒發電狀況[1],針對同樣工況的油井選擇更合適的電動機才是節能的關鍵。
1 抽油機工況模型
油田生產中以游梁式抽油機為主,從功能上包含原動機、減速器和抽油機主體三部分。這里主要分析抽油機主體模型來體現抽油機工況特性[2]。
游梁式抽油機主體為四連桿機構[3],如圖1所示。圖中F為曲柄銷所受的連桿拉力,P為懸點載荷,抽油過程中減速器輸出軸的扭矩Tro等于曲柄半徑r與作用在曲柄銷處的切線力T的乘積,即
Tro=rT(1)
只要確定出曲柄銷處的切線力T就可算出曲柄軸扭矩Tro。將平衡塊重折算到曲柄半徑r處的平衡重,可得:

式中:Wcb為曲柄平衡塊總重;Wc為曲柄重;R為曲柄平衡半徑; Rc為曲柄重心半徑。對曲柄軸中心o′取力矩平衡,可得:
Tr+Wc′rsinφ=Frsinα(3)
由式(1)~(3)可得曲柄平衡游梁式抽油機的曲柄軸扭矩為

公式的第一項表示懸點載荷P在曲柄上造成的扭矩MP,稱為油井負荷轉矩,即

第二項表示曲柄及其平衡重在曲柄軸上造成的扭矩Mc,稱為曲柄平衡扭矩,即Mc=Wc
'rsinφ(6)
式(4)可寫成 Mcr=MP+Mc,所以直接調用油井負荷扭矩和曲柄平衡扭矩即可構建四連桿數學模型。
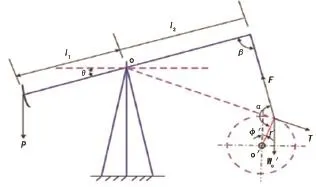
圖1 抽油機四連桿
2 電動機模型與PID調節原理
對于一個特定工況下的抽油機電動機,設給定扭矩和實際扭矩分別為T和T1,兩者的偏差量為e(t)=T-T1,e(t)經過PID控制器的控制算法調整后輸出信號至電動機的測量模塊,改善輸出性能(見圖2)。
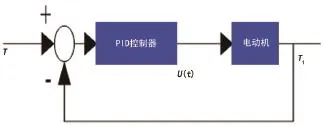
圖2 PID控制圖
PID控制器主要是依據給定值與實際輸出值構成控制偏差,假設輸入為e(t),用公式表示:

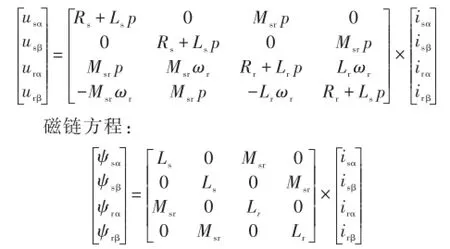
以下分析理想異步電動機的數學模型[4],下標α、β分別代表α、β軸分量,下標s、r代表定子和轉子上的量;Te、T1分別為電磁轉矩、負載轉矩;ωr為轉子電角速度; Msr為定轉子互感;J為轉動慣量。
電壓方程:
電磁扭矩方程:Te=npMsr(isβisα-isαisβ)
運動方程:

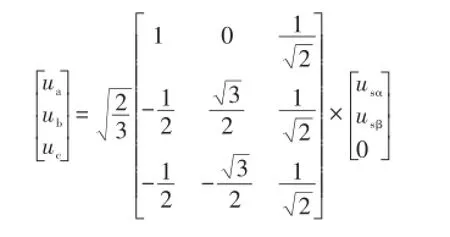
3/2相電壓變換:
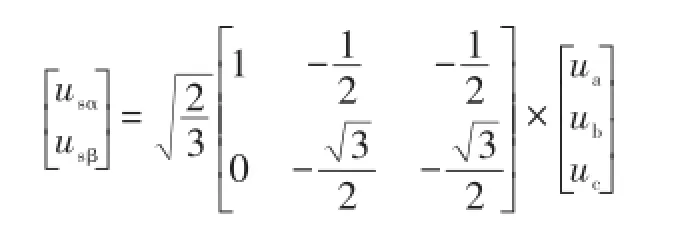
2/3相電壓變換:
3 建模仿真驗證
了解電動機的所有額定參數就可以仿真抽油機的工況,電動機的額定參數可以通過電動機型式試驗得到。當電動機的扭矩為0時,即可得到電動機的空載特性。
根據上述數學公式搭建異步電動機仿真模型,其內置的異步電動機轉換模塊、異步電動機測量模塊。此外還有構建的PID控制模塊、抽油機特定工況扭矩加載模塊T、定子側有功測量模塊以及功率因數和效率計算模塊,見圖3。
其中加載扭矩模塊T是抽油機特定工況的S函數,factor是根據有功與無功的關系編寫的功率因數 S函數,有。效率模塊η=P2/P1,輸出功率P2=T×n/9.55。
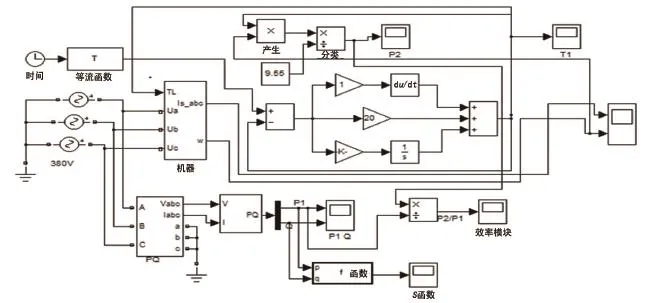
圖3 仿真模型
將異步電動機替換為永磁電動機、高轉差電動機、開關磁阻電動機,為對應的電動機仿真模型,異步電動機型號為YX280M-12,永磁電動機型號為TYC280M-16,高轉差電動機型號為YCCH250-8,定子為Y型接法,開關磁阻電動機型號為KCT250M-10。經過調試PID參數分別為Kp=0.03,Ti=20,Kd=1。見表1。
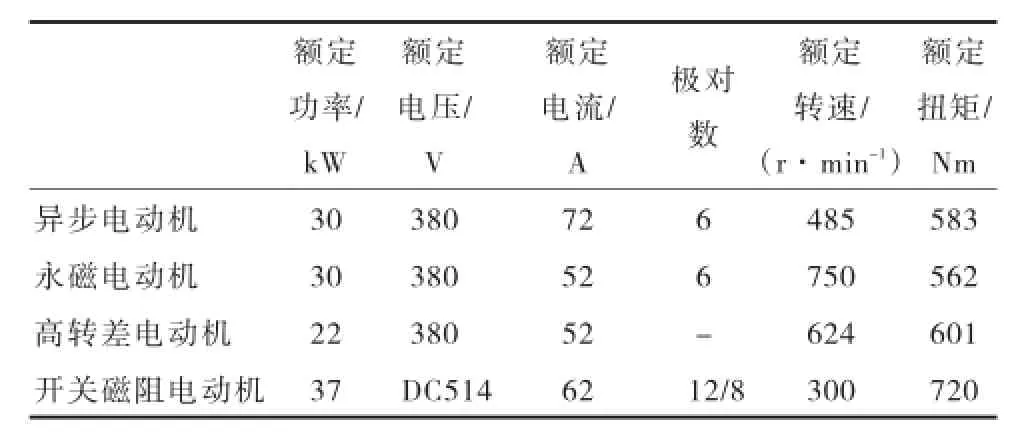
表1 電動機參數
圖4、圖5、圖6、圖7為輸入功率保持一致時的仿真結果。
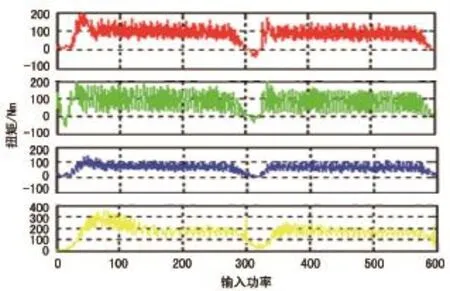
圖4 輸入功率與扭矩的關系

圖5 輸入功率與定子電流的關系
仿真結果表明,在給定加載扭矩經過PID調節后曲線性能沒有較大的改善,載荷依然周期劇烈波動。在功率保持一致的情況下,開關磁阻電動機除了功率因數比永磁電動機差些,其余參數都有很大的優勢,例如電動機效率是最高的(表2)。在保持電動機扭矩一致的情況下,同樣的工況高轉差電動機的效率最高,電動機的輸入輸出性能最好(表3)。
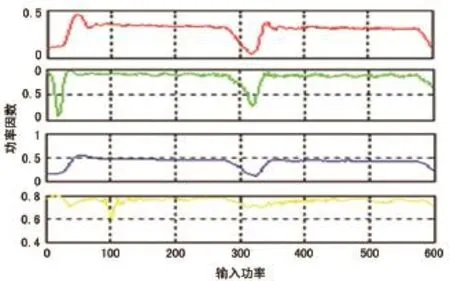
圖6 輸入功率與功率因數的關系
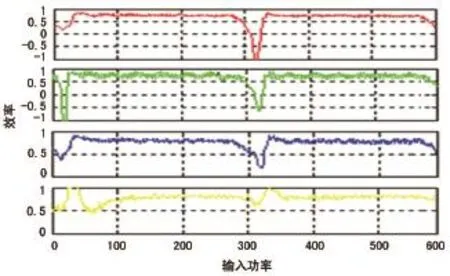
圖7 輸入功率與效率的關系
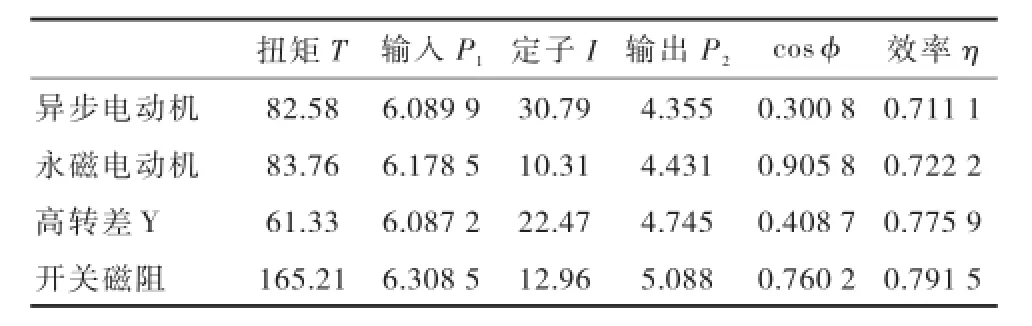
表2 輸入功率一致仿真結果平均值
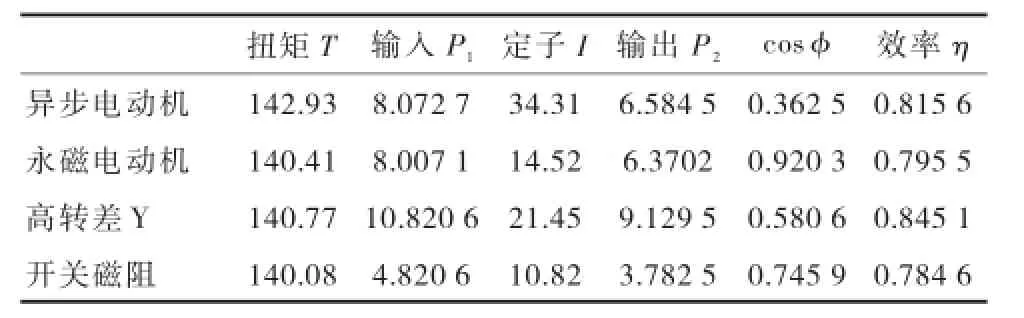
表3 扭矩一致仿真結果平均值
4 結論
針對同樣的油井抽油機工況,建模仿真分析輸入功率一致和輸出扭矩一致時的電動機性能,仿真結果表明,在含有少量倒發電的正常井工況下,永磁電動機在功率因數上更具有優勢,高轉差電動機和開關磁阻電動機在效率方面更具有推廣使用的價值,特別是開關磁阻電動機的效率一致保持在高位,為油田拖動系統電動機節能優選提供了重要參考依據。
[1]孫明施.基于MTALAB的異步電動機動態過程仿真[J].中小型電動機,1999,26(4):30-31.
[2]宋邵樓,丁永峰,范永峰.三相異步電動機的模糊自適應PID控制系統[J].計算機系統應用,2012,21(7):119-122.
[3]尹君馳,劉克毅.基于MATLAB的PID控制系統參數調節[J].電子測試,2014(3):61-63.
[4]賈立輝,鄭申白,張榮華.模糊PID控制的異步電機矢量調速系統仿真[J].微特電機,2008(7):47-49.
10.3969/j.issn.2095-1493.2015.003.005
2015-01-09)
李付龍,碩士研究生,就讀于山東科技大學自動化學院,研究方向為電力電子與電力傳動,E-mail:1060329435@ 163.com,地址:山東省青島市黃島區前灣港路579號,266590。
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
設備管理與維修(2022年21期)2022-12-28 07:35:42
科教新報(2020年21期)2020-06-05 14:26:36
設備管理與維修(2019年17期)2019-10-26 03:50:18
設備管理與維修(2019年9期)2019-09-12 07:43:48
設備管理與維修(2019年14期)2019-02-17 05:37:35
信息記錄材料(2018年12期)2018-02-16 17:27:55
計算機測量與控制(2017年6期)2017-07-01 16:24:20
化工設計通訊(2017年11期)2017-03-02 09:58:17
中國煤層氣(2014年6期)2014-08-07 03:07:05
