基于自適應對消的魚雷電磁引信目標模擬系統收發耦合干擾抑制
2015-10-25 05:44:11嚴爭通肖素娟白志科陳亞林
水下無人系統學報 2015年4期
關鍵詞:信號
嚴爭通,肖素娟,白志科,陳亞林
(1.中國船舶重工集團公司 第705研究所,陜西 西安,710075;2.水下信息與控制重點實驗室,陜西 西安,710075)
基于自適應對消的魚雷電磁引信目標模擬系統收發耦合干擾抑制
嚴爭通1,2,肖素娟1,白志科1,陳亞林1
(1.中國船舶重工集團公司 第705研究所,陜西 西安,710075;2.水下信息與控制重點實驗室,陜西 西安,710075)
基于收發同時工作體制下的收發耦合干擾抑制問題在目標模擬系統中的重要性,闡述了魚雷電磁引信目標模擬系統的設計方案和工作方式,建立了在收發同時工作下的耦合模型,提出了利用自適應對消來實現目標信號和耦合干擾信號的實時分離,并對模型和算法進行了仿真計算,重點研究了自適應對消算法參數的選擇對收發耦合干擾抑制有效性的影響。仿真結果表明,在參數選擇合理情況下的自適應對消方法能有效地解決收發耦合干擾抑制問題,同時考慮自適應對消的實時性和穩定性,采用遞推最小二乘算法比最小均方算法更合理。
魚雷;電磁引信;目標模擬;收發耦合干擾;自適應對消
0 引言
利用魚雷電磁引信目標模擬系統可在陸上和實航進行魚雷電磁引信性能和指標的全面考核。此外,可將魚雷電磁引信目標模擬系統用于自航式誘餌,以在近距離條件下干擾和誘爆來襲魚雷。為保證目標模擬系統對來襲魚雷電磁引信的動作可靠性,要求目標模擬系統的發射信號隨著魚雷電磁引信探測信號的實時變化而變化,因此魚雷電磁引信目標模擬系統應選擇收發同時的工作體制。
但是受結構限制,目標模擬系統的發射天線和接收天線距離較近,發射信號會在接收天線端產生耦合信號,該信號與接收的魚雷電磁引信信號相疊加,進入接收機導致系統無法正常工作。因此消除自身發射信號的影響,從干擾和噪聲中提取魚雷電磁引信信號,做到實時發射和實時接收將是目標模擬系統正常工作的前提,也是影響目標模擬系統性能的關鍵因素。
目標模擬系統處理的是魚雷電磁引信的探測信號,該信號頻率低、指向性差以及多普勒頻移小,收發耦合干擾抑制存在困難。針對收發耦合干擾抑制問題,建立了魚雷電磁引信目標模擬系統在收發同時工作體制下的耦合模型,利用自適應對消來實現目標信號和耦合干擾信號的實時分離,通過仿真來驗證收發分離的有效性。
1 目標模擬系統方案設計
目標模擬系統根據魚雷電磁引信信號的特性和艦艇目標對信號的反射機理進行相似性和幅相變化等參數處理,并利用引信對目標的通過特性調制生成目標模擬回波信號,在來襲魚雷引信作用距離內產生相應的誘導物理場,使魚雷引信在誘導物理場的作用下產生動作響應[1]。
目標模擬系統由接收天線、發射天線、引信信號預處理機、數字信號處理機和回波發射機等構成,如圖1所示。
首先利用電磁信號接收天線接收來襲魚雷電磁引信輻射的電磁信號,經目標模擬系統預處理機對信號進行濾波、放大等處理后,進入數字信號處理機提取信號的頻率、幅度和幅度變化率等參數,然后將信號參數和過靶參數加到目標回波信號模型,最后通過回波信號發射機輻射具有目標特征的回波信號,該信號被魚雷電磁引信接收天線接收,由于該信號帶有目標特征,魚雷電磁引信會對其產生響應,從而完成對引信動作功能的檢驗。
根據目標模擬系統接收和發射的相對時間關系,目標模擬系統可分為收發分時和收發同時2種工作體制,如圖2所示。
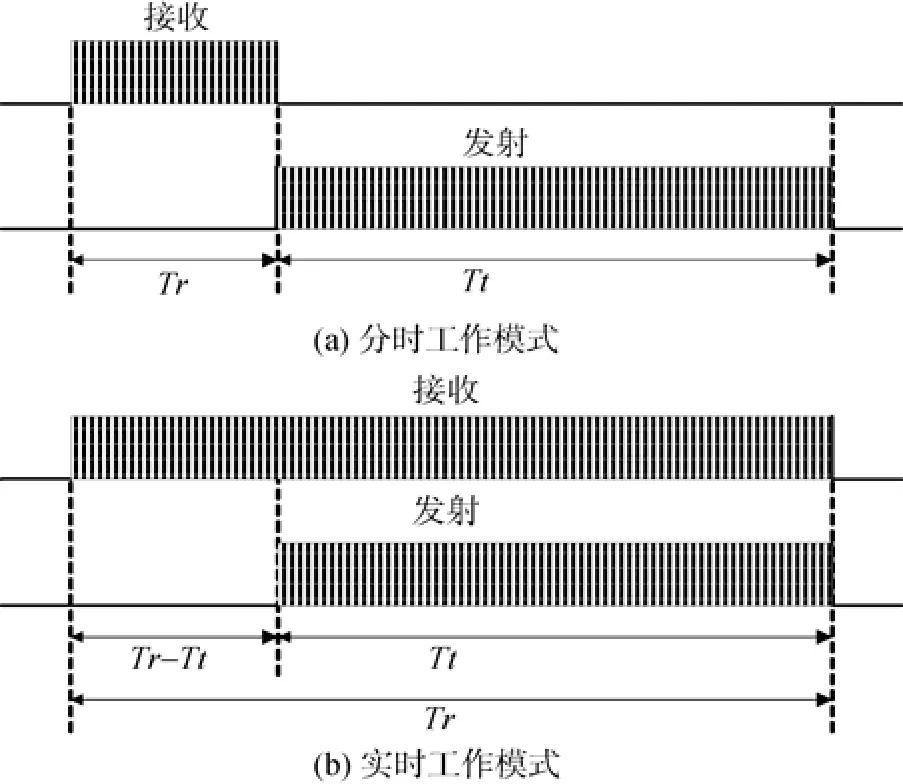
圖2 目標模擬系統的工作體制Fig.2 Working pattern of target simulation system
收發分時工作體制中,首先在Tr時間段內對魚雷電磁引信發射的信號進行檢測和參數識別,然后在Tt時間段內發射相應目標回波信號,接收和發射分時工作,不存在收發耦合干擾抑制問題。
收發同時工作體制中,首先在Tr-Tt時間段內對魚雷電磁引信發射的信號進行檢測和參數識別,在發射目標回波信號的同時,對魚雷發射的電磁信號進行實時檢測,根據發射信號的變化實時調整目標回波的參數,接收和發射同時工作,存在收發耦合干擾抑制問題。
收發分時工作體制雖然不存在收發耦合干擾抑制問題,但是魚雷電磁引信探測信號的參數(包括頻率和波形等)在運動過程中可能不斷變化,目標模擬系統無法對魚雷電磁引信信號進行實時跟蹤,降低了對電磁引信信號的截獲概率,最終降低了對來襲魚雷的誘爆概率。
因此,魚雷電磁引信目標模擬系統應選擇收發同時的工作體制,該體制對于對抗調頻或者跳頻體制的電磁引信也有好處[2]。
2 收發信號的耦合模型與解決方案
對目標模擬系統在收發同時工作的狀態下的干擾和噪聲進行分析,建立收發信號的耦合模型,經分析干擾和噪聲主要有以下幾類:
1)直接耦合干擾,該干擾信號與收發天線配置有關,與發射信號同頻同相,且幅度大于目標回波接收信號。理論上垂直配置時的耦合信號為0,但由于裝配和加工等因素的影響,會有一定的失衡電壓;平行配置時的耦合信號最大,需要采取對消措施;
2)進入接收天線的電磁干擾,該噪聲經過濾波后可消除;
3)電路噪聲,該噪聲會影響檢測的穩定性。
根據以上的分析可知,可以將接收線圈的信號寫成如下形式

式中:Ui1(n)是接收線圈的信號;ST(n)是魚雷電磁引信輻射信號,即需要分離的目標信號;S1(n)是從發射機進入接收機的耦合干擾信號;n1(n)是噪聲信號。
用自適應抵消的方式來消除S1(n),需要一個參考通道,參考通道接收到的信號

式中:S2(n)是發射線圈的發射信號;n2(n)是與接收線圈相當的噪聲信號。
解決收發耦合干擾抑制的問題,需從3個方面來考慮:收發天線端對消(信號源頭隔離);采用屏蔽和濾波(阻斷信號的傳播);選擇合適的信號形式和自適應對消技術(信號處理方法)[3]。
經上述分析,對消耦合信號的處理流程如圖3所示,其中包括天線自動對消、接收機自適應對消和帶通濾波等信號處理環節。
對消耦合信號的處理流程分以下幾步:
1)通過天線端的自動對消來減弱耦合信號;
2)從天線出來的信號將進入接收機,接收信號與參考信號均經過帶通濾波器,濾掉n1(n)中大部分屬于噪聲范疇的干擾信號,使寬帶噪聲變為窄帶噪聲;
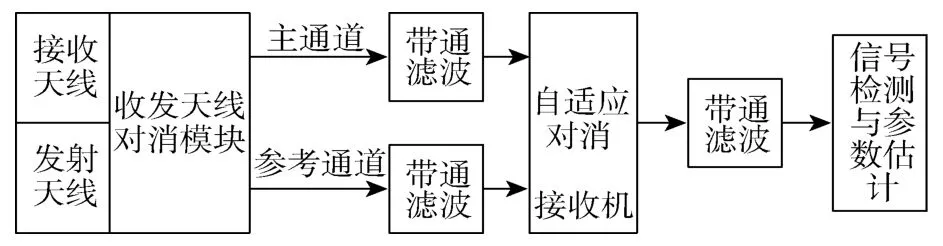
圖3 對消耦合干擾的處理流程圖Fig.3 Flow chart of coupling interference cancellation process
3)經過帶通濾波后的信號進行自適應對消,對消Ui1(n)中的直耦信號S1(n),凸顯出目標信號ST(n),自適應對消的性能直接決定能否有效提取目標信號;
4)對經過自適應對消后的信號經帶通濾波后得魚雷發射的引信信號,對該信號進行檢測和參數估計,為目標模擬回波的生成打下基礎。
文中主要針對接收機端的自適應對消算法,從信號處理層面分析和研究耦合干擾抑制問題。
3 自適應對消
3.1自適應對消原理
自適應對消系統需要1個主通道和1個參考通道,要求對消主通道中的干擾信號,對其中的有用信號則不能產生畸變和影響[4]。自適應濾波器是其核心部分,其特性是當輸入過程的統計特性未知或變化時,能夠調整自己的參數,以滿足某種準則的要求,該特性符合目標模擬系統對于電磁引信信號實時跟蹤的要求,目標模擬系統的自適應對消系統如圖4所示。圖中,ST(n)是有用的目標信號,S1(n)是耦合干擾,S2(n)是與S1(n)相關的干擾,經過自適應濾波后得到S1(n)的最佳估計,誤差e(n)即是對ST(n)的最佳估計。
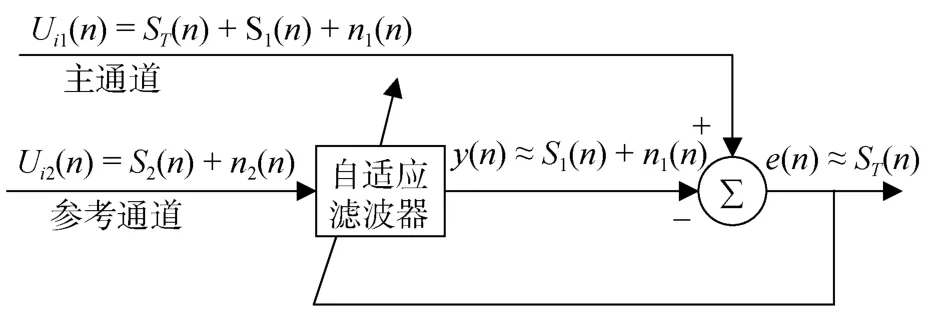
圖4 自適應對消系統Fig.4 Adaptive cancellation system
基于收發信號耦合模型,目標模擬系統中的自適應對消框圖如圖5所示[5]。
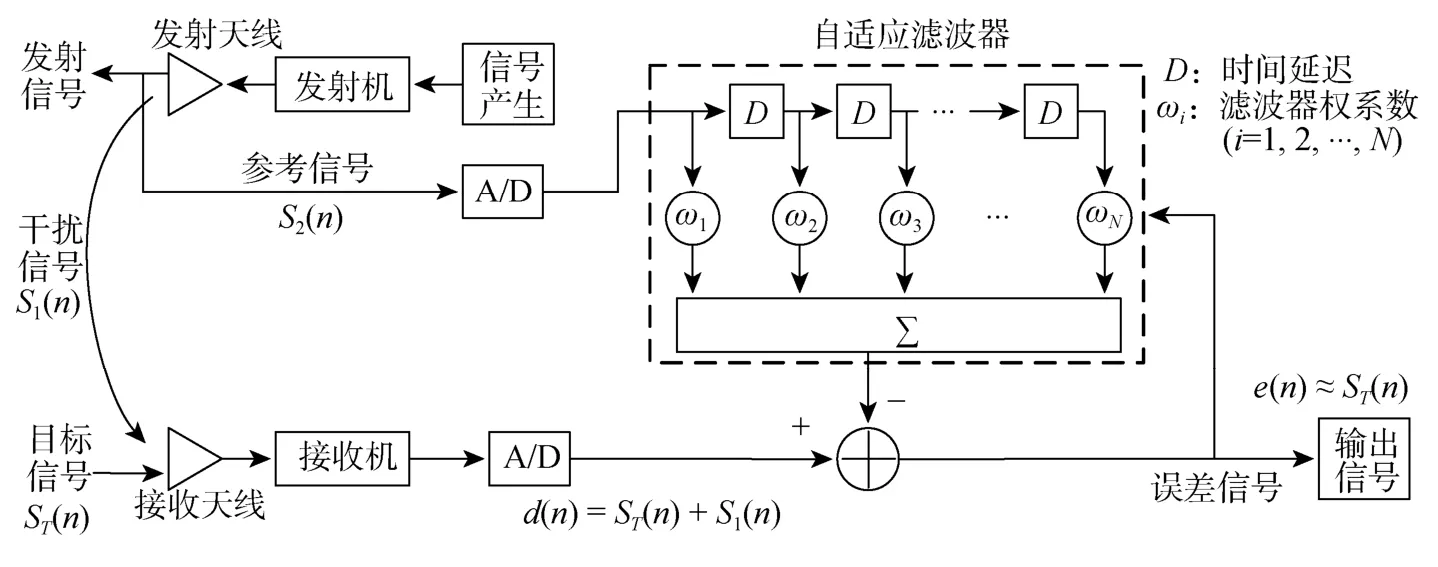
圖5 目標模擬系統中的自適應對消框圖Fig.5 Adaptive cancellation block diagram of target simulation system
進入接收天線的信號包含有用信號ST(n)和干擾信號S1(n),S1(n)是目標模擬系統發射機輸出的信號經延遲和衰減后進入接收機的。參考通道的作用在于檢測發射機發射的干擾信號S2(n),由于傳輸路徑不同,參考通道檢測到的干擾S2(n)與主通道接收S1(n)的干擾是不相同的,但它們均來自同一干擾源,所以兩者是相關的。將檢測到的干擾信號S2(n)通過自適應濾波器進行加權調整,使加權后的參考信號S2(n)在某一最佳準則下接近主通道的干擾信號S1(n),然后經過求和器使2個通道的信號相減,將主通道干擾信號S1(n)對消掉,剩余信號e(n)即為來襲魚雷電磁引信發射的信號ST(n),對其進行后續的信號處理后,產生相應的目標模擬回波。
3.2自適應對消算法
自適應對消要求對消算法有較快的收斂速度和收斂精度。對消系統中的關鍵部分是自適應濾波器,算法是自適應濾波的靈魂。根據不同的準則,有不同的自適應算法。常用的自適應算法有最小均方(least mean square,LMS)算法、遞推最小二乘(recursive least squares,RLS)算法等。
LMS算法采用最小均方誤差準則,計算量小并且易于實現,廣泛應用于自適應控制、雷達、系統辨識及信號處理等領域[6]。步長的選擇對于LMS算法的性能影響很大,有時甚至不收斂,在保證算法收斂的前提下,選用較大的步長可以提高收斂速度,增強自適應干擾對消系統的實際應用價值,但是步長過大會引起失調噪聲增大,從而降低對消系統的性能。因此,固定步長的LMS算法在收斂速度與收斂精度方面相互矛盾,需要在收斂速度和穩態失調之間折衷考慮,這是LMS算法存在的主要問題之一。
RLS算法是維納濾波器的一種時間遞歸算法,關鍵是用二乘方的時間平均最小化準則取代最小均方準則,并按時間進行迭代計算。具體來說,是對初始時刻到當前時刻所有誤差的平方進行平均并使其最小化,再按照這一準則確定濾波器的權系數。其主要優點是收斂速度快,在快速信道均衡、實時系統辨識和時間序列分析中得到廣泛應用[7]。
4 自適應對消仿真
為了驗證自適應對消算法的性能和可行性,對不同的算法進行仿真,仿真條件設置如下。
1)目標信號:設置來襲魚雷電磁引信發射信號工作頻率f0=1 000 Hz,初相位φ=0°,魚雷航速VT=50 kn,魚雷與目標模擬系統的垂直距離h=6 m,交匯角θk=90°。當魚雷以一定速度與目標模擬系統相遇時,目標信號的包絡可以近似為“鐘形脈沖”[8]

其中:A是發射信號的幅度;taxis是鐘形脈沖的對稱軸;α與魚雷航速和交匯角度等有關。
2)耦合干擾信號:頻率與目標信號頻率一致,幅度是目標信號的1~100倍,初相位φ1=0,則耦合信號

設置采樣率2 500 Hz,根據以上仿真條件得到如圖6所示的結果。其中Ui1(n)為目標模擬系統接收線圈的接收信號,包含目標信號和直接耦合干擾信號,可以看到目標信號被淹沒在干擾中;ST(n)為來襲魚雷電磁引信發射的探測信號,即需要被分離出來的目標信號,其幅度是耦合干擾的1/100;n表示采樣點數。
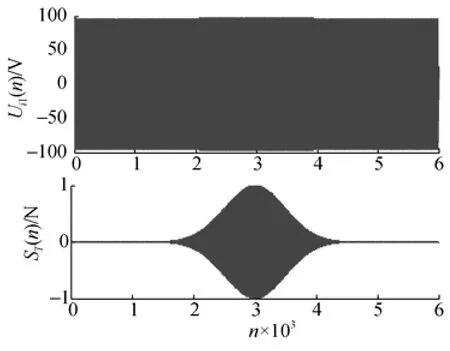
圖6 自適應濾波器的輸入信號和期望分離的目標信號Fig.6 Input signal and expected separative signal of an adaptive filter
4.1LMS算法仿真
1)步長是影響LMS算法性能的關鍵因素,首先對LMS算法在不同步長條件下進行仿真。
設置濾波器階數M=20,步長分別為5×10-6,3×10-6,5×10-7和5×10-9,得到權向量收斂曲線和信號分離結果如圖7所示。圖中:en(n)代表對圖6中ST(n)信號分離的結果;ω表示權向量;m表示迭代次數。
從圖7中可以明顯地看出,在不同步長下,信號分離的變化,步長是影響LMS算法性能的關鍵因素,當步長為5×10-6時,權向量收斂很快,但是分離的信號波形已經失真,分離效果很差。隨著步長的減小,分離的信號波形越來越接近理想波形,當步長為5×10-7時,信號被完全無失真地分離出來,權向量的收斂也較好。隨著步長的進一步減小,信號分離效果又會變差,這是因為收斂速度太慢導致穩態誤差增大。
2)為研究在不同的耦合信號強度下LMS算法的信號分離結果,選取耦合信號與目標信號強度之比為1,5,10,50和100進行仿真,得到LMS算法在不同耦合信號強度的收斂結果見表1。
由表1可看出,為了保證LMS算法的收斂性,當耦合干擾信號強度增大時,迭代步長應該減小,否則結果可能不收斂。當選取的步長合理時,即使在100倍的耦合信號強度下也能將信號有效地分離出來。
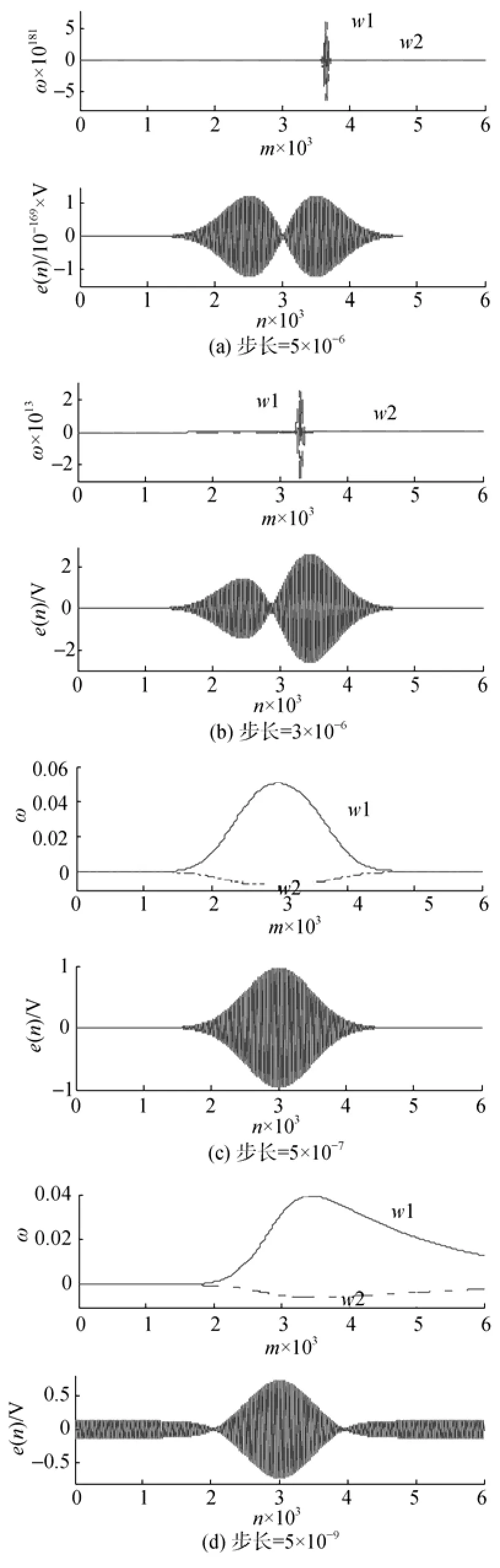
圖7 最小均方(LMS)算法在不同步長下的信號分離結果Fig.7 Signal separation results of least mean square(LMS)algorithm with different steps
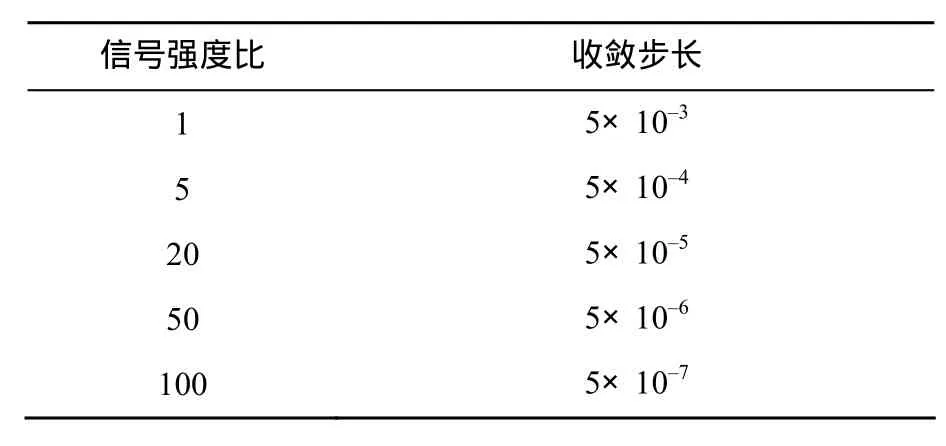
表1 LMS算法在不同耦合干擾信號強度下的收斂步長Table 1 Convergence steps of LMS algorithm for different coupling interference signal strengths
4.2RLS算法仿真
1)影響RLS算法的關鍵因素是濾波器階數,對不同濾波器階數下的RLS算法進行仿真。設置RLS算法的遺忘因子λ=0.99,調整參數δ=0.001,濾波器階數M分別為2,5,10和20,得到的權向量收斂曲線和信號分離如圖8所示。
由圖8的結果可以看出,當濾波器階數M=2時,權向量收斂結果很好,信號被完全無失真地分離出來。隨著階數的增加,分離效果變差,分離的信號波形已經完全失真。所以,濾波器階數是影響RLS算法性能的關鍵因素。
2)選取耦合信號與目標信號強度之比為1,5,20,50和100進行仿真,結果發現RLS算法在濾波器階數等于2時,權向量收斂結果都很好,信號都可以被無失真地分離出來。
從理論上來說,RLS算法沒有剩余誤差,并且RLS算法的收斂性和相關矩陣的特征值無關,從仿真結果來看,RLS算法對消后的剩余誤差相比LMS算法要小很多。
4.3算法分析對比
通過以上仿真結果可以看出,采用自適應對消技術,能實現收發信號的有效分離,利用相關對消原理,對干擾信號具有識別能力,即使在頻譜重疊的情況下,也能消除進入接收通道的干擾信號,并保存有用信號,其中LMS算法和RLS算法應用都很廣泛。
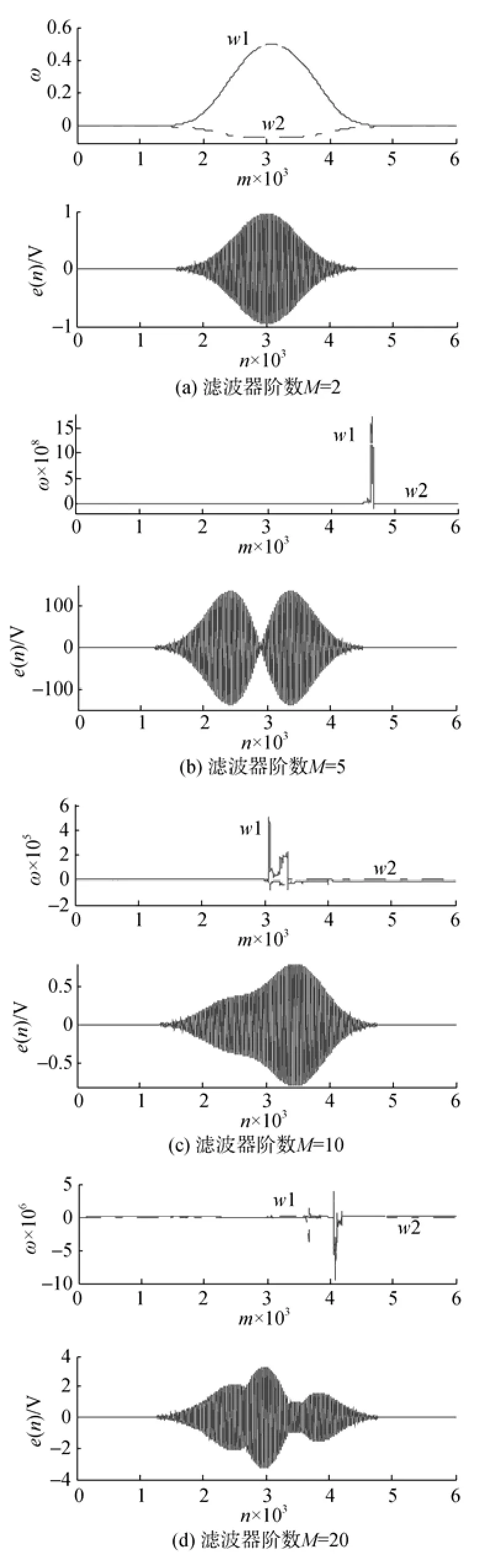
圖8 遞推最小二乘(RLS)算法在不同濾波器階數下的分離結果Fig.8 Signal separation results of recursive least squares(RLS)algorithm with different filter orders
圖9從收斂速度和穩態誤差進行對比,所得在相同仿真條件下LMS和RLS算法的學習曲線。
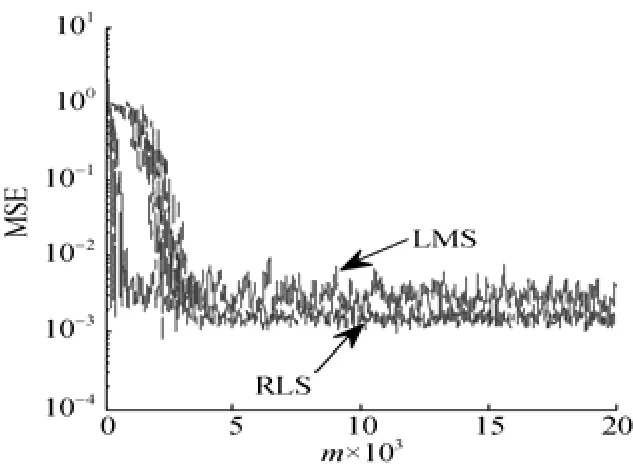
圖9 LMS算法和RLS算法的學習曲線比較Fig.9 Contrast of learning curves between LMS andRLS algorithms
從理論上講,LMS算法每次迭代需要M+1次乘法和M次加法,迭代的運算次數為O(M)。RLS算法每次迭代需要3M2+3M+1次乘法和2M2+2M次加法,迭代的運算次數為O(M2),RLS算法的運算量比LMS算法要多一個數量級。RLS算法雖然收斂速度慢,但是收斂后的穩態誤差比LMS算法小。因此RLS算法的收斂性能優于LMS算法。同時考慮自適應對消的實時性和穩定性問題,如果使用高速DSP器件來實現RLS算法,如ADI公司的TS201S,算法的收斂時間完全可以滿足系統要求[10],應主要考慮穩態誤差,因此采用RLS算法比LMS算法更合理。
5 結束語
魚雷電磁引信目標模擬系統可用于魚雷電磁引信性能指標考核和反魚雷電磁誘餌。文中闡述了魚雷電磁引信目標模擬系統的設計方案和工作體制,建立了魚雷電磁引信目標模擬系統在收發同時工作體制下的耦合模型,提出利用自適應對消來實現有用信號和干擾信號的實時分離,并對不同算法的對消性能進行了仿真計算。理論分析及仿真結果表明,自適應對消方法能有效解決目標模擬系統中的收發耦合干擾抑制問題,RLS算法的對消性能要優于LMS算法,該結果為魚雷電磁引信目標模擬系統的研制提供技術支持,也可作為同類應用的參考,具有一定理論和工程應用價值。
[1]縱瑞方.水中近炸引信干擾機設計[D].西安:西北工業大學,2009.
[2]嚴爭通,肖素娟,崔戶山,等.基于跳頻探測體制的魚雷電磁引信技術[J].魚雷技術,2014,22(6):425-429.
Yan Zheng-tong,Xiao Su-juan,Cui Hu-shan,et al.Electromagnetic Fuze Technology for Torpedo Based on Frequency Hopping Detecting System[J].Torpedo Technology,2014,22(6):425-429.
[3]王寶平.線性調頻連續波雷達信號泄漏對消技術的研究[D].成都:電子科技大學,2013.
[4]王海濤.自適應噪聲對消在引信數字信號處理系統中的應用[J].制導與引信,2009,30(1):13-17.
Wang Hai-tao.Application of Adaptive Noise Cancellation in Fuze Digital Signal Processing System[J].Guidance &Fuze,2009,30(1):13-17.
[5]Chen G,Ren Z L,Li Y B,et al.A Method of Same Frequency Interference Suppression Based on QRD-LS Algorithm[C]//Shanghai:Intelligent Computing and Intelligent Systems,IEEE International Conference,2009,(3):159-162.
[6]王永德,龍憲惠.自適應信號處理社[M].北京:機械工業出版社,2008.
[7]邵亞勇,竺小松.RLS算法及其改進形式在信號分離中的應用分析[J].電子測試,2012,1(1):23-26.
Shao Ya-yong,Zhu Xiao-song.Application of RLS Algorithm and Its Signal Separation[J].Electronic Test,2012,1(1):23-26.
[8]施曉海,陳彬強,白志科,等.時頻分析及曲線擬合在引信信號檢波中的應用[J].魚雷技術,2013,21(6):418- 421.
Shi Xiao-hai,Chen Bin-qiang,Bai Zhi-ke,et al.Applications of Time-frequency Analysis and Curve Fitting to Fuze Signal Detection[J].Torpedo Technology,2013,21(6):418-421.
[9]龔耀寰.自適應濾波[M].北京:電子工業工業出版社,2002.
[10]陳光,任志良,張濤,等.基于自適應RLS算法的魚雷電磁引信直接耦合干擾消除[J].魚雷技術,2010,18(3):198-201.
Chen guang,Ren Zhi-liang,Zhang Tao,et al.Elimination of Direct Coupling Interference in Torpedo Electromagnetic Fuze Based on Adaptive RLS Algorithm[J].Torpedo Technology,2010,18(3):198-201.
(責任編輯:楊力軍)
Receive-Transmit Coupling Interference Suppression for Torpedo Electromagnetic Fuze Target Simulation System Based on Adaptive Cancellation
YAN Zheng-tong1,2,XIAO Su-juan1,BAI Zhi-ke1,CHEN Ya-lin1
(1.The 705 Research Institute,China Shipbuilding Industry Corporation,Xi′an 710075,China;2.Science and Technology on Underwater Information and Control Laboratory,Xi′an 710075,China)
Considering the importance of receive-transmit coupling interference suppression problem in simultaneous transmit-receive operation for the target echo simulation system,a coupling model of torpedo electromagnetic fuze for target echo simulation system is established in the condition of simultaneous transmit-receive operation.An adaptive cancellation algorithm is proposed to achieve real-time separation of target signal and coupling interference.The model and algorithm are analyzed via simulation and calculation,laying emphasis on the influence of parameters selection for the adaptive cancellation algorithm on the performance of coupling interference suppression.Simulation results show that the coupling interference suppression could be solved by the proposed algorithm if the parameters are selected properly.With respect to real-time property and stability of adaptive cancellation,the recursive least squares algorithm behaves better than the least mean square algorithm.
torpedo;electromagnetic fuze;target simulation;receive-transmit coupling interference;adaptive cancellation
TJ631.2;TN973.4
A
1673-1948(2015)04-0269-07
2015-04-08;
2015-04-20.
嚴爭通(1989-),男,在讀碩士,主要研究方向為信號探測與信息處理.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
